Baek, H., Jun, B., Choi, G., & Lee, P. (2012). A Case Study on the Operation Strategy of Hemire from the Analysis of Deep-Sea ROV Operations. Abstract book of The Korean Society for Marine Environment & Energy, 1723-1729.
Baek, H., Jun, BH., Yoon, SM., & Noh, M. (2019). Study on Identification Procedure for Unidentified Underwater Targets Using Small ROV Based on IDEF Method.
Journal of Ocean Engineering and Technology,
33(3), 289-299.
https://doi.org/10.26748/KSOE.2019.022


Baek, H., Kim, KH., Jun, BH., Lee, PM., & Lim, YK. (2008). Estimation of the Hydrodynamic Coefficients for the Deep-sea UUV. Journal of Ocean Engineering and Technology, 22(4), 97-105.
Choi, J., Park, J., Jung, J., & Choi, HT. (2019a). Development of Underwater 3D Positioning System using Underwater Acoustic Modem.
Journal of Institute of Control, Robotics and Systems,
25(10), 916-922.
https://doi.org/10.5302/J.ICROS.2019.19.0155
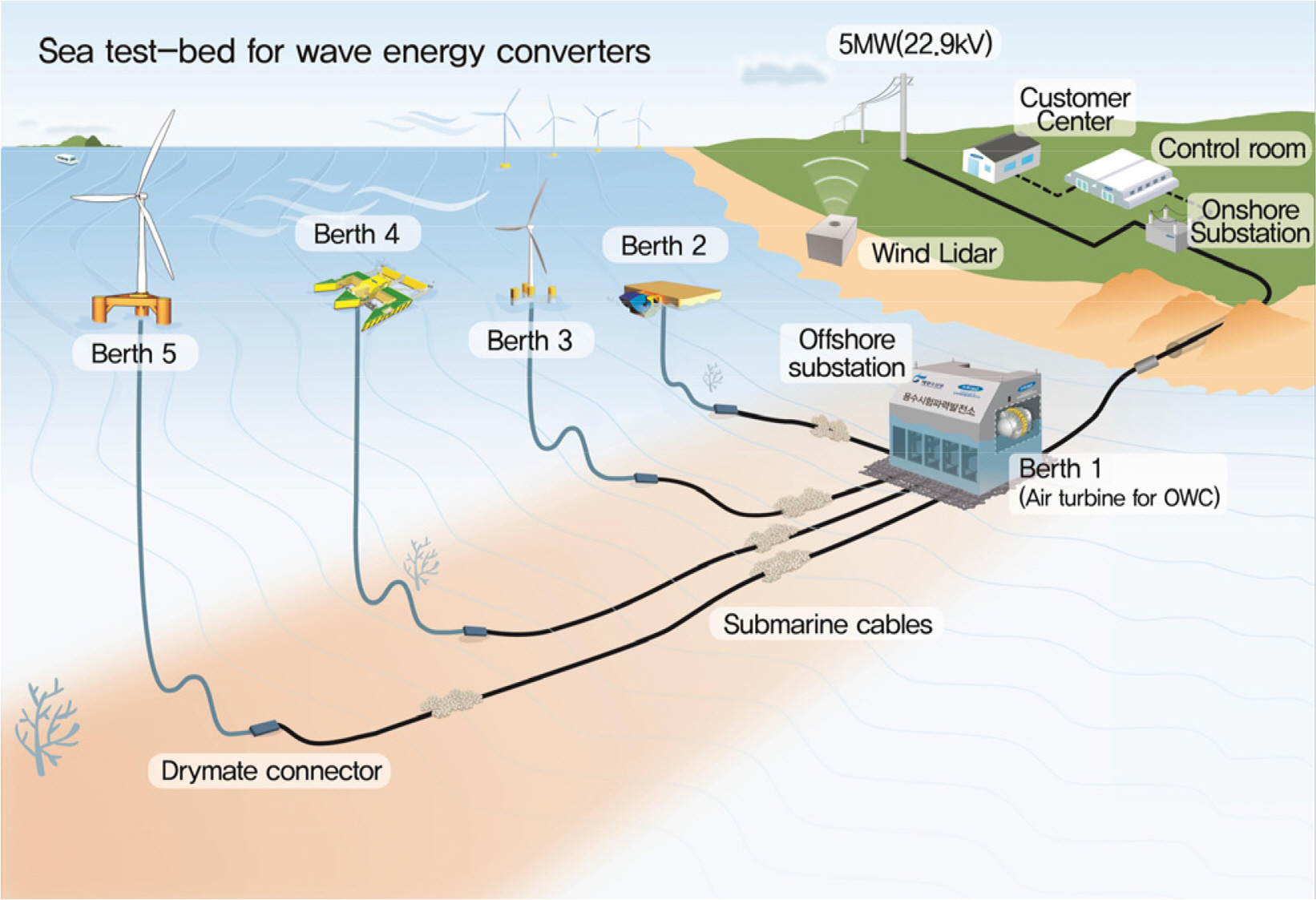
Choi, JS., Lee, JK., Lim, CH., Ko, TK., Park, JY., Kim, K., & Cho, IH. (2019b). Current State of Development of the Open Sea Test Site for Wave Energy Converters. Proceedings of The Joint Conference of the Korean Association of Ocean Science and Technology Societies, (2019).
González, J., Monagas, V., Remírez, X., Luque, A., Hernández, J., & Llinás, O. (2015). PLOCAN. An Offshore Test Site for Ocean Energy Converters.
Proceedings of OCEANS 2015 - Genova, Genoa. 1-4.
https://doi.org/10.1109/OCEANS-Genova.2015.7271245.
Jeollabuk-do. (2019). Report of Feasibility Analysis Research of Establishment for Small Marine Unmanned System Demonstration Platform, Republic of Korea.
Jun, BH., Jeong, YH., Shim, H., & Lee, PM. (2015a). An Experiment on Searching, Identification and Recovery of Underwater Artefacts off the Western Coast of Korea Using Underwater Walking Robot Crabster CR200. Proceedings of the 2015 Spring conference of the Korean Society of Mechanical Engineers. 710-712.
Jun, BH., Lee, FY., Park, JY., Lee, PM., & Kim, SM. (2009). Analysis of Control Responses in the Field Test of ISiMI100 AUV. Proceedings of the 2009 Fall conference of the Korean Society of Ocean Engineers. 12-16.
Jun, BH., Lee, PM., & Jung, YH. (2015b). Experience on Underwater Artefact Search using Underwater Walking Robot Crabster CR200.
Proceedings of OCEANS 2015 MTS/IEEE Washington. Washington, DC. p 1-5.
https://doi.org/10.23919/OCEANS.2015.7404618.
Jun, BH., Yoo, SY., Lee, PM., Park, JY., Shim, H., & Baek, H. (2017). The Sea Trial of Deep-sea Crabster CR6000 System.
IEMEK Journal of Embedded Systems and Applications,
12(5), 331-341.
https://doi.org/10.14372/IEMEK.2017.12.5.331
Kim, CW. (2005). A Study on the Information Modeling of Defense R&D Process Using IDEF Methodology. The Journal of Society for e-Business Studies, 10(1), 41-60.
Kim, H., Kim, J., Cho, IH., Paeng, DG., & Choi, JS. (2017). Survey of Seafloor at Chagwi-do of Jeju Island to Select 60-m-class Sea Test Bed of Wave Energy Converter.
Journal of Ocean Engineering and Technology,
31(4), 308-314.
https://doi.org/10.26748/KSOE.2017.08.31.4.308
Lee, GM., Park, JY., Lee, PM., Jun, BH., Kim, KH., Lee, CM., & Jeong, HS. (2012). Design of 6000m Autonomous Underwater Vehicle ISiMI6000. Proceedings of The Joint Conference of the Korean Association of Ocean Science and Technology Societies, (2012). 1719-1722.
Lee, PY., Park, SK., Kwon, ST., Park, S., Jung, H., Park, MS., & Lee, PM. (2015). Dynamic Modeling of Autonomous Underwater Vehicle for Underwater Surveillance and Parameter Tuning with Experiments.
Journal of Ocean Engineering and Technology,
29(6), 488-498.
https://doi.org/10.5574/KSOE.2015.29.6.488
Lee, PM., Jun, BH., Baek, H., Kim, B., Shim, H.., Park, JY., & Kim, WS. (2016). Explorations of Hydrothermal Vents in Southern Mariana Arc Submarine Volcanoes using ROV Hemire.
Journal of Ocean Engineering and Technology,
30(5), 389-399.
https://doi.org/10.5574/KSOE.2016.30.5.389
Park, JY., Ko, TK., Choi, JS., Kim, KH., Lee, JK., Kim, GW., & Baek, WD. (2019). Establishment of Wave Energy Data for Performance Assessment of Wave Energy Converter. Proceedings of the 2019 Fall Conference of the Korean Society for Marine Environment and Energy, 79-84.
Park, SK., Lee, PY., Park, SW., Jung, HS., & Park, MS. (2015). Design and Field Test of Heading and Depth Control for Autonomous Underwater Vehicle HW200. Proceedings of Institute of Control, Robotics and System Annual Conference. 365-366.
Ryu, HJ., Hong, K., Shin, SH., Kim, SH., & Kim, YD. (2011). Study on Analysis of Wave Energy Resources and Wave Energy Density Map of the Korean Sea Area. Proceedings of Joint Meeting of the Korean Association of Ocean Science and Technology, 1464-1468.
The National Institute of Standards and Technology. (1993). Draft Federal Information Processing Standards Publication 183, U.S. Department of Commerce (Springfield), Virginia.