1. ņä£ ļĪĀ
ĒĢ┤ņ¢æņŚÉņä£ ņÜ┤ņÜ®ļÉśļŖö ļČĆņ£ĀņŗØ ĒĢ┤ņ¢æ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śņ£Āņ¦ĆļŖö Ļ│äļźśņäĀņØä ņØ┤ņÜ®ĒĢ£ Ļ│äļźśņŗ£ņŖżĒģ£Ļ│╝ ņČöņ¦äĻĖ░ņØś ņČöļĀźņØä ņØ┤ņÜ®ĒĢ£ ļÅÖņĀü ņ£äņ╣śņ£Āņ¦Ć ņŗ£ņŖżĒģ£ņØĖ DP(Dynamic positioning) ņŗ£ņŖżĒģ£ņØ┤ ņØ╝ļ░śņĀüņ£╝ļĪ£ ņé¼ņÜ®ļÉśĻ│Ā ņ׳ļŗż. DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£(DP assisted mooring system)ņØĆ Ļ│äļźśņŗ£ņŖżĒģ£Ļ│╝ DPņŗ£ņŖżĒģ£ņØä Ļ▓░ĒĢ®ĒĢ£ ĒśĢĒā£ļĪ£ņŹ©, ĻĘ╣ĒĢ£ņØś ĒÖśĻ▓ĮņĪ░Ļ▒┤ņŚÉņä£ Ļ│äļźśņŗ£ņŖżĒģ£ļ¦īņ£╝ļĪ£ļŖö ņ£äņ╣śņ£Āņ¦Ć ĻĖ░ļŖźņØä ņĀüņĀłĒ׳ ņłśĒ¢ēĒĢĀ ņłś ņŚåņØä ļĢī, ļÅģļ”ĮņĀüņØĖ ņ£äņ╣śņ£Āņ¦Ćņŗ£ņŖżĒģ£ļ│┤ļŗż ņÜ░ņłśĒĢ£ ņ£äņ╣śņ£Āņ¦Ćņä▒ļŖźņØä ņĀ£Ļ│ĄĒĢ£ļŗż. ļśÉĒĢ£ DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņĀüņÜ®ņØĆ Ļ╣ŖņØĆ ņłśņŗ¼ņŚÉ ņäżņ╣śļÉ£ ļČĆņ£ĀņŗØ ĒĢ┤ņ¢æ ĻĄ¼ņĪ░ļ¼╝ņØśĻ│äļźśņäĀņŚÉ Ļ│╝ļÅäĒĢ£ ļ¼┤Ļ▓īņāüņŖ╣ņØ┤ ņ£Āļ░£ļÉĀ Ļ▓ĮņÜ░ ņ×¼ļŻīļĪ£ ņØĖĒĢ£ ļČĆĒĢśļź╝ ņżäņØ╝ ņłś ņ׳ļŗżļŖö ņןņĀÉņØ┤ ņ׳ļŗż. Ryu and Kim(2003)ņØĆ ņłśņŗ¼ņØ┤ ļ¦żņÜ░ Ļ╣ŖņØĆ ņ¦ĆņŚŁ ļ░Å ĻĘ╣ĒĢ£ņØś ĒÖśĻ▓ĮņØä Ļ▓¼ļÄīņĢ╝ ĒĢśļŖö ņśüĻĄ¼ņĀüņØĖ Ēöīļ×½ĒÅ╝ņŚÉļŖö ļŗ©ļÅģņĀüņØĖ DPņŗ£ņŖżĒģ£ņØä ņé¼ņÜ®ĒĢśļŖö Ļ▓āļ│┤ļŗż DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØä ņé¼ņÜ®ĒĢśļŖö Ļ▓āņØ┤ ĒĢ®ļ”¼ņĀüņ×äņØä ļ│┤ņśĆļŗż.
ņØ┤ļ¤¼ĒĢ£ DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØĆ ļŗ©ļÅģņĀüņØĖ DPņŗ£ņŖżĒģ£Ļ│╝ ļŗ¼ļ”¼ Ļ│äļźśņäĀņØś ņןļĀźņØä Ļ│ĀļĀżĒĢśņŚ¼ ņĀ£ņ¢┤ ļ¬®Ēæ£ņĀÉņØĖ Set point(SP)ļź╝ ņäĀņĀĢĒĢśļŖö Ļ▓āņØ┤ ĒĢäņÜöĒĢśļŗż. ļö░ļØ╝ņä£ ņĢłņĀäĒĢ£ ņāØņé░ĒÖ£ļÅÖņØä ļ│┤ņןĒĢśĻĖ░ ņ£äĒĢśņŚ¼ SPļŖö Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņןļĀźĻ│╝ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śļź╝ ņĢłņĀä ļ▓öņ£ä ļé┤ņŚÉ ņ£Āņ¦Ćņŗ£Ēé¼ ņłś ņ׳ļŖö ņ£äņ╣śĻ░Ć ļÉśņ¢┤ņĢ╝ļ¦ī ĒĢ£ļŗż(Nguyen and S├Ėrensen, 2009a).
Barth Berntsen et al.(2008)ļŖö Ļ│äļźśņäĀņØś ņŗĀļó░ļÅäņ¦Ćņłś(Reliability Index)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņ¦ĆņåŹņĀüņ£╝ļĪ£ ņŗĀļó░ļÅäņ¦Ćņłśļź╝ ĒŚłņÜ® ļ▓öņ£äņŚÉ ņ£Āņ¦Ćņŗ£Ēé¼ ņłś ņ׳ļŖö SP ņĀ£ņ¢┤ļ▓ĢņØä ņĀ£ņĢłĒĢśņśĆļŗż. ņØ┤ ļ░®ļ▓ĢņØä ņé¼ņÜ®ĒĢ£ ņĀ£ņ¢┤ļŖö ņŗĀļó░ļÅäņ¦Ćņłśļź╝ ņé¼ņÜ®ĒĢśņŚ¼ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņĢłņĀäņØä ņ¦üĻ┤ĆņĀüņ£╝ļĪ£ ņĀ£ņ¢┤ĒĢĀ ņłś ņ׳ņ¦Ćļ¦ī ņןļĀźņØś ļÅÖņĀüņØĖ ņÜöņåīņŚÉ ņØśĒĢ£ ņł£Ļ░äņĀüņØĖ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śļ│ĆĒÖö ļ░Å ņןļĀźļ│ĆĒÖöļź╝ Ļ│ĀļĀżĒĢĀ ņłś ņŚåļŗżļŖö ļŗ©ņĀÉņØ┤ ņ׳ļŗż.
Nguyen and S├Ėrensen(2009b)ļŖö SP ņäżņĀĢļ▓ĢņØä ņØ╝ļ░śņĀüņØĖ ĒÖśĻ▓ĮĻ│╝ Ļ▒░ņ╣£ ĒÖśĻ▓Įņ£╝ļĪ£ ļéśļłäņ¢┤ ņäżļ¬ģĒĢśĻ│Ā ņ׳ņ£╝ļ®░ ĒŖ╣Ē׳, Ļ▒░ņ╣£ ĒÖśĻ▓ĮņŚÉņä£ Ļ│äļźś ņŗ£ņŖżĒģ£ņØś Ēīīļŗ©ņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ£ ļ¬®ņĀüņ£╝ļĪ£ SPļź╝ ņ┤łĻĖ░ ņ£äņ╣śņŚÉ Ļ░ĆĻ╣ØĻ▓ī ņäżņĀĢĒĢ┤ņĢ╝ĒĢ©ņØä Ļ░ĢņĪ░ĒĢśņśĆļŗż. ņØ┤ ļ░®ļ▓ĢņØś Ļ▓ĮņÜ░ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņĢłņĀäņØĆ ļ│┤ņןĒĢĀ ņłś ņ׳ņ£╝ļéś Ļ│╝ļÅäĒĢ£ ņŚ░ļŻī ņåīļ¬©ļź╝ ņ£Āļ░£ĒĢĀ ņłś ņ׳ļŖö Ļ░ĆļŖźņä▒ņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö SPļź╝ ņäżņĀĢĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śņÖĆ ņןļĀź ļ│ĆĒÖöļ¤ēņØä ņØ┤ņÜ®ĒĢ£ ņןļĀź ņČöņĖĪļ░®ļ▓ĢņØä ņĀ£ņĢłĒĢśņśĆļŗż. ņןļĀźņØ┤ Ļ░Ćņן ņĀüņØä Ļ▓āņ£╝ļĪ£ ņśłņāüļÉśļŖö ņ£äņ╣śļź╝ SPļĪ£ ņäżņĀĢĒĢśļŖö ņĀäļץņØä ĻĄ¼ņāüĒĢśņśĆņ£╝ļ®░ ņןļĀź ņČöņĖĪņØä ņ£äĒĢ£ ļ░®ļ▓Ģņ£╝ļĪ£ ĻĄŁņåīņןļĀźĻ│╝ ņĀäņŚŁņןļĀźņØä ĒĢ©Ļ╗ś Ļ│ĀļĀżĒĢśļŖö ļ░®ļ▓ĢņØä ņĀ£ņĢłĒĢśņśĆļŗż. ĻĄŁņåīņןļĀźņØĆ Ēśäņ×¼ņÖĆ Ļ│╝Ļ▒░ņØś ĻĄ¼ņĪ░ļ¼╝ ņ£äņ╣ś ļ░Å ņןļĀźņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņłśņŗØņØä ĒåĄĒĢ┤ Ļ│äņé░ļÉśņŚłņ£╝ļ®░ ņĀäņŚŁņןļĀźņØĆ ĻĄ¼ņĪ░ļ¼╝Ļ│╝ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņĀĢņĀü ĒĢ┤ņäØņØä ņłśĒ¢ēĒĢśņŚ¼ ņé░ņČ£ļÉśņŚłļŗż. ņĄ£ņóģņĀüņ£╝ļĪ£, SPļŖö ļæÉ ņÜöņåīņØś ņżæņ▓®ņŚÉ ņØśĒĢ┤ Ļ▓░ņĀĢļÉśņŚłņ£╝ļ®░ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ĒåĄĒĢśņŚ¼ ļ│Ė ņŚ░ĻĄ¼ņØś Ļ▓░Ļ│╝ļź╝ ņ×ģņ”ØĒĢśņśĆļŗż.
2. ĻĄŁņåīņןļĀź
2.1 ļ¬®ņĀü
ĻĄŁņåīņןļĀźņØĆ ņןļĀź ņČöņĖĪņØä ņ£äĒĢ┤ ņé¼ņÜ®ļÉ£ ņÜöņåī ņżæ ĒĢśļéśņØ┤ļ®░ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣ś ļ│ĆĒÖöņŚÉ ļö░ļźĖ ņןļĀź ļ│ĆĒÖöļ¤ēņØä ĻĖ░ļ░śņ£╝ļĪ£ ĻĄ¼ņĪ░ļ¼╝ņØ┤ ņŻ╝ļ│Ć ņ£äņ╣śļĪ£ ņØ┤ļÅÖĒĢśņśĆņØä ļĢī ņśłņāüļÉśļŖö ņןļĀźņØś ļ│ĆĒÖöļ¤ēņØä ņČöņĖĪĒĢ£ Ļ░ÆņØ┤ļŗż. ĻĄŁņåīņןļĀźņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņןļĀźņØś ņ”ØĻ░Ć ļ░Å Ļ░Éņåī ļ░®Ē¢źņØä ņČöņĖĪĒĢĀ ņłś ņ׳ņ£╝ļ®░ SP ņäĀņĀĢņØä ņ£äĒĢ£ ļ░®Ē¢źņä▒ ņĀ£ņŗ£ļź╝ ņ£äĒĢśņŚ¼ ņé¼ņÜ®ļÉśņŚłļŗż.
2.2 Ļ▓®ņ×ÉņØś ņāØņä▒
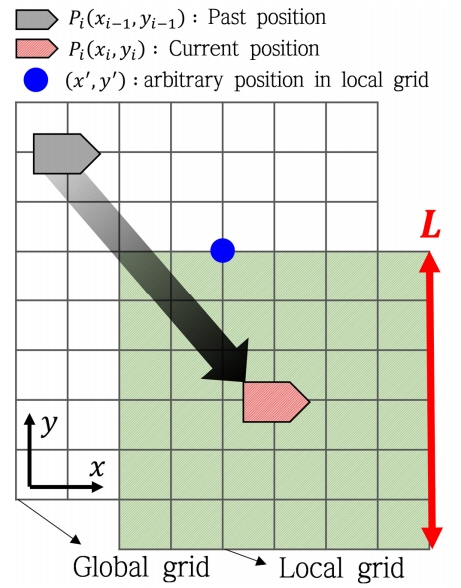
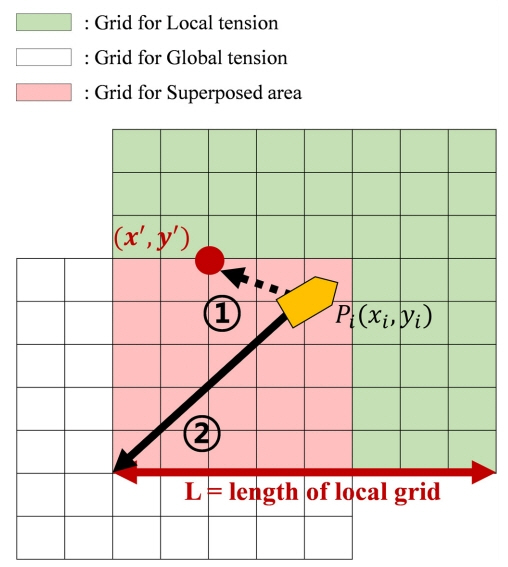
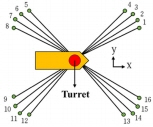
ĻĄŁņåīņןļĀźņØĆ ĻĄŁņåīĻ▓®ņ×ÉļØ╝ļŖö ņśüņŚŁņØä ĻĖ░ļ░śņ£╝ļĪ£ Ļ│äņé░ļÉśņŚłļŗż. ņØ┤ņ▓śļ¤╝ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ĻĄ¼ņĪ░ļ¼╝ņØś ĒÖ£ļÅÖ ļ▓öņ£äļź╝ Ļ▓®ņ×ÉļĪ£ ļéśĒāĆļé┤ņŚłļŗż. ņĀäņŚŁĻ▓®ņ×ÉļŖö Fig. 1ņŚÉ ņŗżņäĀņ£╝ļĪ£ ļ¬ģņŗ£ĒĢ£ Ļ▓®ņ×ÉņØ┤ļ®░ Ļ▓®ņ×ÉņØś ņżæņŗ¼ņ£äņ╣śļŖö ĻĄ¼ņĪ░ļ¼╝ņØś ņäżĻ│ä ņ£äņ╣śļź╝ ļéśĒāĆļéĖļŗż. ĻĄŁņåīĻ▓®ņ×ÉļŖö Fig. 1ņŚÉ ļ╣ŚĻĖłņ£╝ļĪ£ Ēæ£ņŗ£ļÉ£ Ļ▓®ņ×ÉņØ┤ļŗż. ĻĄŁņåīĻ▓®ņ×ÉļŖö ņØ┤ļÅÖĒĢśļŖö ĻĄ¼ņĪ░ļ¼╝ņØś Ēśäņ×¼ņ£äņ╣ś ņżæņŗ¼ņ£╝ļĪ£ ĒśĢņä▒ļÉśĻĖ░ ļĢīļ¼ĖņŚÉ ņØ┤ļÅÖņŚÉ ļö░ļØ╝ ņŚģļŹ░ņØ┤ĒŖĖļÉśļŖö Ļ▓®ņ×ÉņØ┤ļŗż. ļæÉ ņóģļźśņØś Ļ▓®ņ×É Ēü¼ĻĖ░ļŖö Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņÖĆņ╣śņä£Ēü┤(Watch circle)ņØä Ļ│ĀļĀżĒĢśņŚ¼ ņäżņĀĢĒĢśņśĆļŗż. ņØ┤ļŖö SPļĪ£ ņäĀņĀĢļÉĀ ņłś ņ׳ļŖö ņ£äņ╣śļź╝ ņÖĆņ╣śņä£Ēü┤ ļé┤ļĪ£ ņĀ£ĒĢ£ĒĢśņŚ¼ ņ£äņ╣śņĀ£ņ¢┤ Ļ│╝ņĀĢņŚÉņä£ ļ░£ņāØĒĢĀ ņłś ņ׳ļŖö Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│╝ļÅäĒĢ£ ņןļĀźņāüņŖ╣ņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ£ ļ¬®ņĀüņØ┤ļŗż.
2.3 ĻĄŁņåīņןļĀź Ļ│äņé░Ļ│╝ņĀĢ
2.3.1 ĻĄŁņåīņןļĀź ļ│Ćņłś
ĻĄŁņåīņןļĀźņØĆ ĻĄ¼ņĪ░ļ¼╝ņØś ņĄ£ĻĘ╝ ņ£äņ╣ś ļ░Å ņןļĀź ņČöņØ┤ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ Ļ│äņé░ļÉĀ ņłś ņ׳ļŖö ņÜöņåīņØ┤ļŗż. ļö░ļØ╝ņä£ Ļ│äņé░ņØä ņ£äĒĢśņŚ¼ ņé¼ņÜ®ļÉ£ ņ£äņ╣ś ļ░Å ņןļĀźņØĆ ņŗØ (1)ļČĆĒä░ ņŗØ (4)ņŚÉ Ļ▒Ėņ│É ņĀĢņØśļÉśņŚłņ£╝ļ®░, Ļ░üĻ░ü Ēśäņ×¼ ņ£äņ╣ś ļ░Å Ļ│╝Ļ▒░ ņ£äņ╣ś ĻĘĖļ”¼Ļ│Ā Ēśäņ×¼ ņןļĀź ļ░Å Ļ│╝Ļ▒░ ņןļĀźņØä ļéśĒāĆļéĖļŗż. Ļ│╝Ļ▒░ņÖĆ Ēśäņ×¼ņØś ĒÄĖņ░©ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ĻĄŁņåīņןļĀźņØ┤ ņČöņĖĪļÉśļ»ĆļĪ£ ņØ┤ļź╝ ņ£äĒĢ£ ņ£äņ╣śņÖĆ ņןļĀźņØś ĒÄĖņ░©ļź╝ Ļ░üĻ░ü ņŗØ (5)-(6)ņ£╝ļĪ£ ņĀĢņØśĒĢśņśĆļŗż.
2.3.2 ĻĄŁņåīņןļĀź Ļ│äņé░ļ¬©ļŹĖ
Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņןļĀź ļ│ĆĒÖöļź╝ ņØ┤ļÅÖĻ▒░ļ”¼ņŚÉ ļīĆĒĢ£ ņäĀĒśĢņ£╝ļĪ£ Ļ░ĆņĀĢĒĢśļ®┤ ņŗØ (7)ņØä ĒåĄĒĢ┤ ĻĄ¼ņĪ░ļ¼╝ņØ┤ Ļ│╝Ļ▒░ņØś ņ£äņ╣śņŚÉņä£ Ēśäņ×¼ņØś ņ£äņ╣śĻ╣īņ¦Ć ņØ┤ļÅÖĒĢ£ ļŗ©ņ£äĻ▒░ļ”¼ ļŗ╣ ņןļĀźļ│ĆĒÖöļ¤ēņØä ņĀĢņØśĒĢĀ ņłś ņ׳ļŗż. ĻĄŁņåīņןļĀźĻ│äņé░Ļ│╝ņĀĢņØĆ ņĀĢņØśļÉ£ ņ£äņ╣śņÖĆ ņןļĀź ļ│ĆĒÖöļ¤ēņØä ĻĖ░ļ░śņ£╝ļĪ£ ĻĄŁņåīĻ▓®ņ×ÉņØś ļ¬©ļōĀ ņ£äņ╣śņŚÉņä£ ņןļĀźņØä Ļ│äņé░ĒĢśļŖö Ļ│╝ņĀĢņØ┤ļŗż. ļö░ļØ╝ņä£ ņŗØ (7)ņØś ļŗ©ņ£ä ņןļĀźļ│ĆĒÖöļ¤ēņØĖ Unit Tx, Unit TyņŚÉ ĻĄŁņåīĻ▓®ņ×ÉņØś ņ£äņ╣śņÖĆ Ļ│╝Ļ▒░ ĻĄ¼ņĪ░ļ¼╝ņ£äņ╣śņØś ĒÄĖņ░©ļź╝ Ļ│▒ĒĢśļ®┤ ĻĄŁņåīĻ▓®ņ×ÉņØś Ļ░ü ņ£äņ╣śņŚÉņä£ņØś ņןļĀźņØä ņČöņĖĪĒĢĀ ņłś ņ׳ļŗż. Fig. 1ņŚÉ ņĀÉņ£╝ļĪ£ ļ¬ģņŗ£ļÉ£ ĻĄŁņåīĻ▓®ņ×ÉņØś ņ×äņØś ņ£äņ╣śļź╝ (x', y')ļĪ£ Ļ░ĆņĀĢĒĢśļ®┤ ņ£äņ╣ś ĒÄĖņ░©ļŖö ņŗØ (8)Ļ│╝ Ļ░ÖņØ┤ Ļ│äņé░ļÉĀ ņłś ņ׳ļŗż. ņŗØ (9)ļź╝ ĒåĄĒĢ┤ ņ£äņ╣śĒÄĖņ░©ņØĖ (Ōłåx', Ōłåy')ļź╝ ļŗ©ņ£ä ņןļĀźļ│ĆĒÖöļ¤ēņŚÉ Ļ│▒ĒĢśļ®┤ ĒĢ┤ļŗ╣ Ļ▓®ņ×É ņ£äņ╣śņŚÉņä£ņØś ņןļĀźņØĖ (Tx, Ty)'nļź╝ ņČöņĖĪĒĢĀ ņłś ņ׳ļŗż. ņČöņĖĪļÉ£ x, yļ░®Ē¢źņØś ņןļĀźņØĆ ņŗØ (10)ņŚÉ ļö░ļØ╝ ĒĢ®ņé░ĒĢśņŚ¼ ĒĢ£ Ļ│äļźśņäĀņŚÉ ļīĆĒĢ£ ĻĄŁņåīņןļĀźņ£╝ļĪ£ ņé¼ņÜ®ļÉśņŚłļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņśłņĖĪļÉ£ ņןļĀźņØś Ēü¼ĻĖ░Ļ░Ć ņĢäļŗī ņ”ØĻ░ÉĻ▓ĮĒ¢źņØä ļ│┤ĻĖ░ ņ£äĒĢśņŚ¼ ņŗØ (10)Ļ│╝ Ļ░ÖņØ┤ x, yļ░®Ē¢źņØś ņןļĀźņØä ĒĢ®ņé░ĒĢśņśĆļŗż. ņŗØ (10)Ļ╣īņ¦ĆļŖö ĻĄŁņåīĻ▓®ņ×ÉņØś ĒĢ£ ņ£äņ╣śņŚÉņä£ ĒĢśļéśņØś Ļ│äļźśņäĀņŚÉ ļīĆĒĢ£ ņןļĀźņČöņĖĪĻ│╝ņĀĢņØ┤ļŗż. ļö░ļØ╝ņä£ ņŗØ (10)ņØś ņןļĀźņØĆ Ļ│äļźśņäĀņØś Ļ░£ņłśļ¦īĒü╝ ļ░śļ│Ą Ļ│äņé░ļÉśļ®░ Ļ░ü Ļ│äļźśņäĀļ¦łļŗż Ļ│äņé░ļÉ£ ņןļĀźņØĆ ņĄ£ņóģņĀüņ£╝ļĪ£ ņŗØ (11)ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒĢ®ņé░ļÉśņŚłļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ SPļŖö ĻĄ¼ņĪ░ļ¼╝ņØś ņāØņĪ┤ņØ┤ ņĢäļŗī ņāØņé░ĒÖ£ļÅÖņØś ĒÜ©ņ£© ņ”ØļīĆļź╝ ņ£äĒĢ£ ņןļĀź Ļ░Éņåīļź╝ ļ¬®ņĀüņ£╝ļĪ£ ĒĢśĻ│Ā ņ׳ļŗż. ļö░ļØ╝ņä£ ļŗ©ņØ╝ņØ┤ ņĢäļŗī ņĀäņ▓┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņןļĀźņØä ņżäņØ╝ ņłś ņ׳ļŖö SPļź╝ ņäĀņĀĢĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ĻĄŁņåīņןļĀźņØĆ ņŗØ (11)ņŚÉ ļö░ļØ╝ Ļ░ü Ļ│äļźśņäĀņØś ņןļĀźņØä ļ¬©ļæÉ ĒĢ®ĒĢśņŚ¼ ņé░ņČ£ĒĢśņśĆļŗż.
2.4 ĻĄŁņåīņןļĀź Ļ│äņé░ ņŗ£ļ«¼ļĀłņØ┤ņģś
2.4.1 ļīĆņāüņäĀĒśĢĻ│╝ Ļ│äļźśņŗ£ņŖżĒģ£
ĻĄŁņåīņןļĀźņØś Ļ│äņé░Ļ│╝ņĀĢņØĆ ņŗØ (1)ņŚÉņä£ ņŗØ (11)ņØś Ļ│╝ņĀĢņØä ĒåĄĒĢ┤ ņłśĒ¢ēļÉśņŚłņ£╝ļ®░ ņŗØ (1)-(3)ņØś Ļ│äņé░ņŚÉ ņé¼ņÜ®ļÉ£ ļŹ░ņØ┤Ēä░ļŖö 3ņŗ£Ļ░ä Ļ│äļźśĒĢ┤ņäØņ£╝ļĪ£ļČĆĒä░ ņé░ņČ£ĒĢśņśĆļŗż. Ļ│äļźśĒĢ┤ņäØņŚÉ ņé¼ņÜ®ļÉ£ ļīĆņāüņäĀĒśĢņØĆ FPSO(Floating production storage offloading)ņØ┤ļ®░ ņŻ╝ņÜöņĀ£ņøÉņØĆ Table 1ņŚÉ ļ¬ģņŗ£ĒĢśņśĆļŗż. Ļ│äļźśņŗ£ņŖżĒģ£ņØĆ ņØĖĒä░ļäÉ Ēä░ļĀø ņŗ£ņŖżĒģ£(Internal terret system)ņØä ņĀüņÜ®ĒĢśņśĆĻ│Ā ļ¬©ļŹĖĻ│╝ ņŻ╝ņÜö ņĀĢļ│┤ļŖö Table 2ņŚÉ ļéśĒāĆļé┤ņŚłļŗż. ĒĢ┤ņäØņØĆ ņłśņŗ¼ 150mņØś ĒĢ┤ņŚŁņŚÉņä£ ĒīīļĀź, ĒÆŹļĀź, ņĪ░ļźśļĀźņØś ĒÖśĻ▓ĮņĪ░Ļ▒┤ņŚÉņä£ ņłśĒ¢ēļÉśņŚłļŗż.
2.4.2 Ļ▓®ņ×É ņĀ£ņøÉ
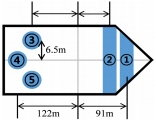
ĻĄŁņåīņןļĀź Ļ│äņé░ņŚÉ ņĀüņÜ®ļÉ£ ĻĄŁņåīĻ▓®ņ×ÉņØś ļ®┤ņĀüņØĆ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņÖĆņ╣śņä£Ēü┤ņØä Ļ│ĀļĀżĒĢśņŚ¼ ņäĀņĀĢĒĢśņśĆļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ļīĆņāüņ£╝ļĪ£ ĒĢśļŖö ĒśäņłśņéŁ(Catenary) Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņÖĆņ╣śņä£Ēü┤ņØĆ ņØ╝ļ░śņĀüņ£╝ļĪ£ ņłśņŗ¼ņØś 10~15%ņØ┤ļŗż. 150mņØś ņłśņŗ¼ņŚÉ ļö░ļźĖ ņÖĆņ╣śņä£Ēü┤ņØĆ 15~30mņØ┤ļ»ĆļĪ£ Fig. 1ņØś LļĪ£ ļ¬ģņŗ£ļÉ£ ĻĄŁņåīĻ▓®ņ×ÉņØś ĒĢ£ ļ│ĆņØś ĻĖĖņØ┤ļŖö ņĄ£ļīĆ ņÖĆņ╣śņä£Ēü┤ņØś ņ¦Ćļ”äņØĖ 60mļĪ£ ņäĀņĀĢĒĢśņśĆļŗż. ļśÉĒĢ£, Ļ▓®ņ×ÉņØś Ļ░äĻ▓®ņØĆ 1mļĪ£ ņäżņĀĢĒĢśņśĆļŗż. ņ”ē, Ēśäņ×¼ ņäĀļ░ĢņØä ņżæņŗ¼ņ£╝ļĪ£ 60├Ś60m2ņŚÉ ĒĢ┤ļŗ╣ĒĢśļŖö ļ®┤ņĀüņŚÉ 1mņØś Ļ░äĻ▓®ņØä Ļ░Ćņ¦ä Ļ▓®ņ×Éļź╝ ņāØņä▒ĒĢśļ»ĆļĪ£ ņ┤Ø 3,721Ļ░£ņØś ņ£äņ╣śņŚÉņä£ ĻĄŁņåīņןļĀźņØ┤ Ļ│äņé░ļÉ£ļŗż.
2.4.3 ĻĄŁņåīņןļĀź Ļ│äņé░ ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝
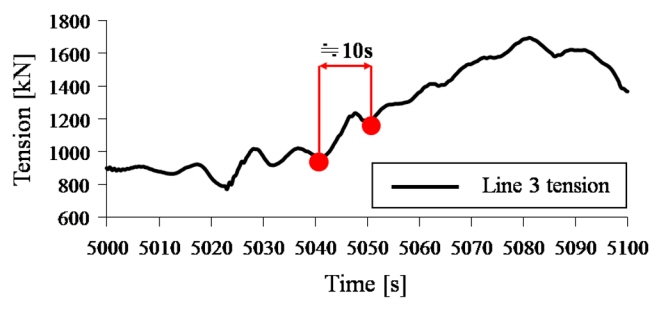
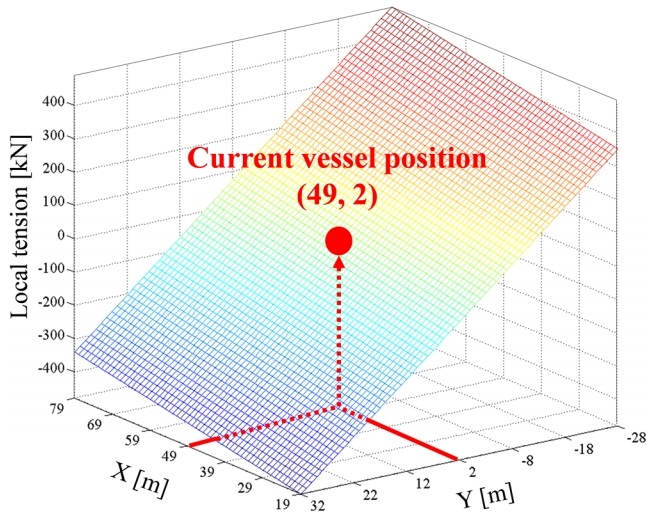
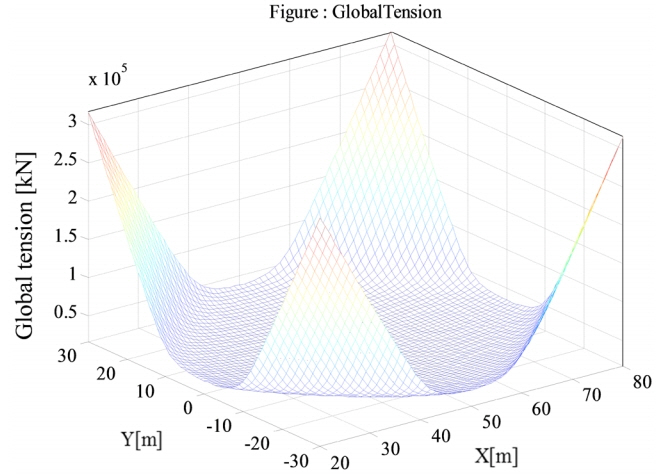
3ņŗ£Ļ░äņØś ĒĢ┤ņäØņØä ĒåĄĒĢ┤ ĻĄ¼ņĪ░ļ¼╝ņØś ņĀäĒøäļÅÖņÜö(Surge), ņóīņÜ░ļÅÖņÜö(Sway) ļ░®Ē¢ź ņ£äņ╣ś ļ░Å 16Ļ░£ Ļ│äļźśņäĀņØś 3ņŗ£Ļ░ä ņןļĀź ņØ┤ļĀźņØä ņé░ņČ£ĒĢśņśĆļŗż. ņןļĀź ņŗ£Ļ│äņŚ┤ņØĆ ņĀĆņŚŁĒåĄĻ│╝ĒĢäĒä░ņ▓śļ”¼ļź╝ ņłśĒ¢ēĒĢśņśĆņ£╝ļ®░ ņĄ£ņóģņĀüņ£╝ļĪ£ ĻĄŁņåīņןļĀź Ļ│äņé░ Ļ│╝ņĀĢņŚÉ ņé¼ņÜ®ļÉ£ ļŹ░ņØ┤Ēä░ļŖö i=9120ņ┤ł, i-1=9110ņ┤łņŚÉņä£ ņČöņČ£ĒĢśņśĆļŗż. 10ņ┤łņØś ņŗ£Ļ░äņ”ØļČäņØĆ Fig. 2ņÖĆ Ļ░ÖņØ┤ 3ņŗ£Ļ░ä Ļ│äļźśĒĢ┤ņäØņØś Ļ▓░Ļ│╝ ņé░ņČ£ļÉ£ ņןļĀź ņŗ£Ļ│äņŚ┤ņŚÉņä£ ņ”ØĻ░É ņČöņØ┤ļź╝ ņ£Āņ¦ĆĒĢĀ ņłś ņ׳ļŖö ĻĄ¼Ļ░äņØä Ļ│ĀļĀżĒĢśņŚ¼ ņäĀņĀĢĒĢśņśĆļŗż. Fig. 2ļŖö 3ļ▓ł Ļ│äļźśņäĀņØś 3ņŗ£Ļ░ä ņןļĀź ņŗ£Ļ│äņŚ┤ņŚÉņä£ 5,000~5,100ņ┤łņØś Ļ▓░Ļ│╝ļź╝ ļéśĒāĆļéĖ ĻĘĖļלĒöäņØ┤ļŗż. 10ņ┤ł ņØ┤ņāüņØś ņŗ£Ļ░ä ņ”ØļČäņØä ņäĀĒāØĒĢĀ Ļ▓ĮņÜ░ ņןļĀźņØś ļ»ĖņåīĒĢ£ ņ”ØĻ░É ņČöņØ┤Ļ░Ć Ļ│ĀļĀżļÉśņ¦Ć ņĢŖņĢä ņŗżņĀ£ ņןļĀź ņ”ØĻ░ÉņČöņØ┤ņÖĆ Ēü¼Ļ▓ī ļ▓Śņ¢┤ļé£ ļĪ£ņ╗¼ņןļĀźņØ┤ ņé░ņČ£ļÉĀ ņłś ņ׳ļŗż. ļö░ļØ╝ņä£ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņé¼ņÜ®ļÉ£ ņŗ£Ļ░äņ”ØļČäņØĆ ļĪ£ņ╗¼ņןļĀźĻ│äņé░ ņåīņÜöņŗ£Ļ░äĻ│╝ ĒĢ®ļ”¼ņĀüņØĖ Ļ▓░Ļ│╝ ļÅäņČ£ņØä ņ£äĒĢśņŚ¼ 10ņ┤łļĪ£ ņäĀņĀĢļÉśņŚłļŗż. 9110ņ┤ł, 9120ņ┤łņØś ņ£äņ╣ś ļ░Å ņןļĀźņØĆ Table 3ņŚÉ ļ¬ģņŗ£ĒĢśņśĆļŗż. ņØ┤ ļŹ░ņØ┤Ēä░ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗØ (7)ņŚÉņä£ ņŗØ (11)ņØä ļö░ļØ╝ 900Ļ░£ņØś ĻĄŁņåīĻ▓®ņ×É Ļ░ü ņ£äņ╣śļ¦łļŗż ĻĄŁņåīņןļĀźņØä Ļ│äņé░ĒĢśņśĆļŗż. Ļ│äņé░ļÉ£ ĻĄŁņåīņןļĀźņØä Fig. 3ņØś ŅāŠņČĢņŚÉ ļéśĒāĆļé┤ņ¢┤ 3ņ░©ņøÉ ĻĘĖļלĒöäļĪ£ ļÅäņŗØĒÖöĒĢśņśĆļŗż. ĻĘĖļלĒöäņŚÉ Ēæ£ņŗ£ļÉ£ ņĀÉņØĆ 9120ņ┤łņØś ĻĄ¼ņĪ░ļ¼╝ ņ£äņ╣śņØĖ (49, 2)ļź╝ ļéśĒāĆļé┤ļ®░ ņØ┤ļź╝ ņżæņŗ¼ņ£╝ļĪ£ Ļ│äņé░ļÉ£ ņןļĀźņØś ņāüņŖ╣ ļ░Å ĒĢśĻ░Ģ ļ░®Ē¢źņØä ņČöņĖĪĒĢĀ ņłś ņ׳ļŗż. ņśłļź╝ ļōżņ¢┤, ĻĄŁņåīņןļĀźņØ┤ (79, -28)ņŚÉ Ļ░ĆĻ╣īņøīņ¦łņłśļĪØ ļåÆņĢäņ¦ĆĻ│Ā ņ׳ņ£╝ļ»ĆļĪ£ SPļŖö (19, 32)ņŚÉ Ļ░ĆĻ╣īņÜ┤ ņ£äņ╣śļĪ£ ņäĀņĀĢļÉśņ¢┤ņĢ╝ĒĢ©ņØä ņĢī ņłś ņ׳ļŗż. ļö░ļØ╝ņä£ ĻĄŁņåīņןļĀźņØĆ ņŗżņŗ£Ļ░äņ£╝ļĪ£ Ļ░ĆļÅÖļÉśļŖö DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØś SP ņäĀņĀĢņØ┤ ĒĢäņÜöĒĢĀ ļĢī, ņĄ£ĻĘ╝ņØś ņןļĀźĻ│╝ ņ£äņ╣ś ļ│ĆĒÖö ņČöņØ┤ļź╝ Ļ│ĀļĀżĒĢśņŚ¼ ņĀ£ņ¢┤ņØś ļ░®Ē¢źņä▒ ĒīÉļŗ©ņŚÉ ĒÖ£ņÜ®ļÉĀ ņłś ņ׳ļŗż.
3. ņĀäņŚŁņןļĀź
3.1 ļ¬®ņĀü
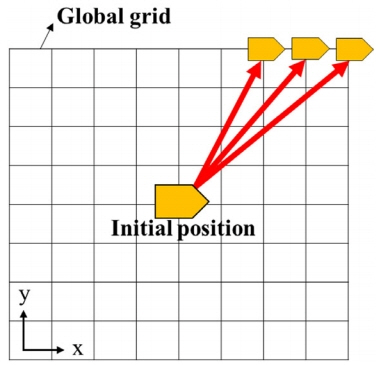
ņןļĀź ņČöņĖĪņØä ņ£äĒĢ£ ņÜöņåī ņżæ ņĀäņŚŁņןļĀźņØĆ ļÅÖņĀü ņÜöņåīĻ░Ć ĒżĒĢ©ļÉ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢśĻĖ░ ņĀäņŚÉ ņĀĢņĀüĒĢ┤ņäØņØä ĒåĄĒĢ┤ Ļ│äņé░ļÉśļŖö ņןļĀźņØ┤ļŗż. ņĀäņŚŁņןļĀźņØĆ Fig. 4Ļ│╝ Ļ░ÖņØ┤ ņĀäņŚŁĻ▓®ņ×ÉņØś Ļ░ü ņ£äņ╣śņŚÉņä£ ĻĄ¼ņĪ░ļ¼╝Ļ│╝ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņĀĢņĀüĒĢ┤ņäØņØä ĒåĄĒĢ┤ ņé░ņČ£ļÉ£ļŗż. ņĀäņŚŁņןļĀźņØĆ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śļ│ĆĒÖöņŚÉ ļö░ļźĖ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ļČĆĒĢśļČäĒżļź╝ ņ¦üĻ┤ĆņĀüņ£╝ļĪ£ ļéśĒāĆļé┤ļ®░ Ļ│╝ļÅäĒĢ£ ņןļĀźņØ┤ ļ░£ņāØĒĢĀ ņ£äņ╣śņÖĆ ļ░®Ē¢źņä▒ņØä SP ņäĀņĀĢ Ļ│╝ņĀĢņŚÉ ĒżĒĢ©ņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ ņé¼ņÜ®ļÉ£ ņÜöņåīņØ┤ļŗż.
3.2 ņĀäņŚŁņןļĀź Ļ│äņé░ ņŗ£ļ«¼ļĀłņØ┤ņģś
3.2.1 ņĀäņŚŁņןļĀź Ļ│äņé░Ļ│╝ņĀĢ
SPļź╝ ņäĀņĀĢĒĢśĻĖ░ ņ£äĒĢ£ ņןļĀźņČöņĖĪ Ļ│╝ņĀĢņŚÉņä£ ņĀäņŚŁņןļĀźņØä ņé░ņČ£ĒĢśĻĖ░ ņ£äĒĢ┤ Fig. 4ņØś ļ░®ņŗØņ£╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ļīĆņāü ĻĄ¼ņĪ░ļ¼╝ ļ░Å Ļ│äļźśņŗ£ņŖżĒģ£ņØĆ 2.4ņĀłņØś ĻĄŁņåīņןļĀźņØś ņŗ£ļ«¼ļĀłņØ┤ņģśņŚÉ ņé¼ņÜ®ļÉ£ ņĀ£ņøÉņÖĆ ļÅÖņØ╝ĒĢśļŗż. ņĀäņŚŁĻ▓®ņ×ÉņØś Ēü¼ĻĖ░ļŖö ĻĄŁņåīĻ▓®ņ×ÉņÖĆ ļÅÖņØ╝ĒĢśĻ▓ī Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņÖĆņ╣śņä£Ēü┤ņØä Ļ│ĀļĀżĒĢśņŚ¼ 60├Ś60m2ņŚÉ ĒĢ┤ļŗ╣ĒĢśļŖö ļ®┤ņĀüĻ│╝ 1mņØś Ļ▓®ņ×É Ļ░äĻ▓®ņØä Ļ░Ćņ¦ĆļÅäļĪØ ņĀĢņØśĒĢśņśĆļŗż. ņĀĢņĀüĒĢ┤ņäØņØĆ ņäĀļ░ĢĻ│╝ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņŗ£Ļ░äņśüņŚŁ ĒĢ┤ņäØ ĒöäļĪ£ĻĘĖļשņØĖ Orcaflexļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņ¦äĒ¢ēļÉśņŚłļŗż.
ņĀäņŚŁņןļĀźņØĆ Fig. 4ņØś ĻĄ¼ņĪ░ļ¼╝ņØś ņ┤łĻĖ░ ņ£äņ╣ś(Inital position)ņŚÉņä£ Ļ▓®ņ×ÉņØś Ļ░ü ņ£äņ╣śļĪ£ ĻĄ¼ņĪ░ļ¼╝ņØä ņØ┤ļÅÖņŗ£ņ╝░ņØä ļĢī ļ¬©ļōĀ Ļ│äļźśņäĀņŚÉ ņ£Āļ░£ļÉśļŖö ņĀĢņĀüņØĖ ņןļĀźņØä ņŗØ (12)ņŚÉ ļö░ļØ╝ ĒĢ®ĒĢśņŚ¼ ņé░ņČ£ĒĢśņśĆļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀüņÜ®ļÉ£ Ļ│äļźśņŗ£ņŖżĒģ£ņØĆ Ēä░ļĀøņØä ņżæņŗ¼ņ£╝ļĪ£ ļīĆņ╣ŁņØä ņØ┤ļŻ©Ļ│Ā ņ׳ļŗż. ļö░ļØ╝ņä£ Ēä░ļĀøņØä ņżæņŗ¼ņ£╝ļĪ£ 1ņé¼ļČäļ®┤ļ¦ī ņĀĢņĀüĒĢ┤ņäØņØä ņłśĒ¢ēĒĢ£ Ēøä Ļ▓®ņ×ÉņØś ļéśļ©Ėņ¦Ć ļČĆļČäņØĆ ļīĆņ╣ŁņĀüņ£╝ļĪ£ ņČöņĖĪĒĢśņŚ¼ ļ¬©ļōĀ Ļ▓®ņ×ÉņŚÉ ļīĆĒĢ£ ņĀäņŚŁņןļĀźņØä ņé░ņČ£ĒĢśņśĆļŗż.
3.2.2 ņĀäņŚŁņןļĀź Ļ│äņé░ ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝
ņé░ņČ£ļÉ£ ņןļĀźņØä Fig. 5ņÖĆ Ļ░ÖņØ┤ Ļ▓®ņ×ÉņØś Ļ░ü ņ£äņ╣śņŚÉ ļīĆĒĢ┤ ņłśņ¦üņČĢņŚÉ ļéśĒāĆļé┤ļ®┤ ļÅäņŗØĒÖöļÉ£ 3ņ░©ņøÉ ĻĘĖļלĒöäļź╝ ņāØņä▒ĒĢĀ ņłś ņ׳ļŗż. ņĀäņŚŁņןļĀźņØĆ ĻĄ¼ņĪ░ļ¼╝ņØś ņØ┤ļÅÖ ņŗ£ Ļ│╝ļÅäĒĢ£ ņןļĀźņØś ļ░£ņāØĻĄ¼Ļ░äņØä ņ¦üĻ┤ĆņĀüņ£╝ļĪ£ ļéśĒāĆļé┤Ļ│Ā ņ׳ņ£╝ļ®░ ņĀ£ņ¢┤ļ░®Ē¢źņŚÉ ļö░ļźĖ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņןļĀź ļ│ĆĒÖö ĒŖ╣ņä▒ņØä SP ņāØņä▒ ņĢīĻ│Āļ”¼ņ”śņŚÉ ĒżĒĢ©ņŗ£Ēé¼ ņłś ņ׳ļŗż.
4. ņĀ£ņ¢┤ ļ¬®Ēæ£ņĀÉ(SP) ņäĀņĀĢ
ņןļĀźņØś Ļ░Éņåīļź╝ ļ¦īņĪ▒ĒĢśļŖö SPļŖö Fig. 6ņØś ļ╣ŚĻĖłņ£╝ļĪ£ Ēæ£ņŗ£ļÉ£ ĻĄ¼ņŚŁĻ│╝ Ļ░ÖņØ┤ ĻĄŁņåīņÖĆ ņĀäņŚŁņןļĀźņØ┤ ņżæņ▓®ļÉ£ ĻĄ¼ņŚŁņŚÉņä£ ņäĀņĀĢļÉ£ļŗż. ĻĄŁņåīņןļĀźĻ│╝ ņĀäņŚŁņןļĀźņØä ļ¬©ļæÉ Ļ│ĀļĀżĒĢ£ ņśüņŚŁņŚÉņä£ SPļź╝ ņäĀņĀĢĒĢśĻĖ░ ņ£äĒĢ┤ ņżæņ▓®ĒĢśļŖö Ļ│╝ņĀĢņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦Ćļ®░ ņżæņ▓®ļÉ£ ĻĄ¼ņŚŁņØś Ļ░ü Ļ▓®ņ×É ņ£äņ╣śņŚÉņä£ ĻĄŁņåīņÖĆ ņĀäņŚŁņןļĀźņØ┤ ĒĢ®ņé░ļÉ£ļŗż.
ĻĄŁņåīņÖĆ ņĀäņŚŁņןļĀźņØś ĒĢ®ņé░ņØĆ ņŗØ (13)Ļ│╝ Ļ░ÖņØ┤ ╬▒Ļ│äņłśļź╝ ņé¼ņÜ®ĒĢśņśĆļŗż. ╬▒ļŖö Fig. 6Ļ│╝ Ļ░ÖņØ┤ Ēśäņ×¼ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śņØĖ Pi ļĪ£ļČĆĒä░ ļ®Ćņ¢┤ņ¦łņłśļĪØ Ļ░ÆņØ┤ ņāüņŖ╣ĒĢśĻ▓ī ļÉ£ļŗż. ņ”ē, ╬▒ļŖö ņןļĀźņżæņ▓® Ļ│╝ņĀĢņŚÉņä£ Pi ļĪ£ļČĆĒä░ ļ®Ćņ¢┤ņ¦łņłśļĪØ ņĀäņŚŁņןļĀźņØś ņśüĒ¢źņØä Ēü¼Ļ▓ī ļ░śņśüĒĢśĻĖ░ ņ£äĒĢ£ ļ¬®ņĀüņ£╝ļĪ£ ņé¼ņÜ®ļÉ£ļŗż. ņØ┤ļ¤¼ĒĢ£ Ļ│╝ņĀĢņØĆ ņżæņ▓®ļÉ£ ņśüņŚŁ ļé┤ņŚÉņä£ Ēśäņ×¼ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śļĪ£ļČĆĒä░ ļ®Ćņ¢┤ņ¦łņłśļĪØ Ļ│äļźśņäĀņØś ĒśĢņāüļ│ĆĒÖö ļ░Å ĒÖśĻ▓ĮĒĢśņżæņØś ļÅÖņĀüņÜöņåī ņśüĒ¢źņØ┤ ņ╗żņ¦ĆĻĖ░ ļĢīļ¼ĖņŚÉ, Ļ│äļźśņŗ£ņŖżĒģ£ņØä ņäĀĒśĢņ£╝ļĪ£ Ļ░ĆņĀĢĒĢśņŚ¼ ņןļĀźņØä ņČöņĖĪĒĢ£ ĻĄŁņåīņןļĀźļ│┤ļŗż ņĀäņŚŁņןļĀźņØś ņśüĒ¢źņØä ļŹö ļ¦ÄņØ┤ Ļ│ĀļĀżĒĢśĻĖ░ ņ£äĒĢ©ņØ┤ļŗż. ļö░ļØ╝ņä£ ņżæņ▓®ļÉ£ ņśüņŚŁņØś Ļ░ü ļģĖļō£(Node)ļōżņØĆ ļ¬©ļæÉ ļŗżļźĖ ╬▒Ļ░ÆņØä Ļ░Ćņ¦ĆĻ▓ī ļÉśĻ│Ā, ņØ┤ Ļ░ÆņØĆ ņŗØ (14)ļź╝ ĒåĄĒĢ┤ ņØ┤ļŻ©ņ¢┤ņ¦ł ņłś ņ׳ļŗż. ņŗØ (14)ņØś ļČäņ×ÉļŖö Ēśäņ×¼ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śļĪ£ļČĆĒä░ ļ¢©ņ¢┤ņ¦ä Ļ▒░ļ”¼ļź╝ ļéśĒāĆļé┤Ļ│Ā, ļČäļ¬©ļŖö Ēśäņ×¼ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śļĪ£ļČĆĒä░ ļ¢©ņ¢┤ņ¦ä ņĄ£ļīĆ Ļ▒░ļ”¼ļź╝ ļéśĒāĆļé┤ļ®░, ņØ┤ļŖö Fig. 6ņŚÉņä£ Ļ░üĻ░ü ŌæĀĻ│╝ ŌæĪļĪ£ Ēæ£ĒśäļÉśņ¢┤ ņ׳ļŗż. ņĄ£ņóģņĀüņ£╝ļĪ£, ņןļĀźņØś Ļ░Éņåīļź╝ ļ¦īņĪ▒ņŗ£Ēé¼ ņłś ņ׳ļŖö SPļŖö ĒĢ®ņé░ļÉ£ ņןļĀźņČöņĖĪņśüņŚŁņŚÉņä£ ņĄ£ņåīņØś ņןļĀźņØä Ļ░Ćņ¦ĆļŖö ņ£äņ╣śļĪ£ ņäĀņĀĢĒĢśņśĆļŗż.
5. ņäżņĀĢļÉ£ SPņØś ņ£ĀĒÜ©ņä▒ Ļ▓Ćņ”Ø
5.1 ņĀüņÜ® ļīĆņāü ļ░Å ļ░®ļ▓Ģ
ņĀ£ņŗ£ĒĢ£ SP ņé░ņČ£Ļ│╝ņĀĢņØś ņĢīĻ│Āļ”¼ņ”śņØ┤ ņĀüņÜ®ļÉ£ DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŗżņŗ£Ļ░äņ£╝ļĪ£ Ļ│äņé░ļÉśļŖö SPņØś ņןļĀź Ļ░Éņåī ļ¦īņĪ▒ļÅäļź╝ Ļ▓Ćņ”ØĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ĻĄ¼ņĪ░ļ¼╝Ļ│╝ DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØ┤ 3ņŗ£Ļ░äņØś ņ¦ĆņåŹņĀüņØĖ ĒÖśĻ▓ĮĒĢśņżæņŚÉ ļģĖņČ£ļÉśļŖö ļÅÖņĢł ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śņÖĆ Ļ│äļźśņäĀņØś ņןļĀźņØ┤ Ļ▓ĮĻ│äņĪ░Ļ▒┤ņØä ņ┤łĻ│╝ĒĢśņśĆņØä Ļ▓ĮņÜ░, ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀ£ņĢłĒĢ£ SP ņé░ņČ£ ņĢīĻ│Āļ”¼ņ”śņ£╝ļĪ£ļČĆĒä░ SPĻ░Ć Ļ│äņé░ļÉ£ļŗż. DPņŗ£ņŖżĒģ£ņØ┤ Ļ│äņé░ļÉ£ SPļĪ£ ņĀ£ņ¢┤ļź╝ ņłśĒ¢ēĒ¢łņØä Ļ▓ĮņÜ░ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņןļĀź Ļ░Éņåīļź╝ ņĀĢļ¤ēņĀüņ£╝ļĪ£ ĒÅēĻ░ĆĒĢśņśĆļŗż.
ņŗ£ļ«¼ļĀłņØ┤ņģśņŚÉ ņé¼ņÜ®ļÉ£ ĻĄ¼ņĪ░ļ¼╝Ļ│╝ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņĀ£ņøÉņØĆ Ļ░üĻ░ü Table 1Ļ│╝ Table 2ņŚÉ ņåīĻ░£ĒĢśņśĆĻ│Ā, DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņČöņ¦äĻĖ░ļŖö Table 4ņŚÉ ļ¬ģņŗ£ĒĢśņśĆļŗż. 3Ļ░£ņØś ņĢäņ¦Ćļ¼┤ņŖż(Azimuth) ņČöņ¦äĻĖ░ņÖĆ 2Ļ░£ņØś Ēä░ļäÉ ņČöņ¦äĻĖ░(Tunnel thrusters)ļź╝ ļ░░ņ╣śĒĢśņśĆņ£╝ļ®░ PDņĀ£ņ¢┤ĻĖ░ļź╝ ņĀüņÜ®ĒĢ£ ņĀ£ņ¢┤ļź╝ ņłśĒ¢ēĒĢśņśĆļŗż. ņĀ£ņ¢┤ļīĆņāüņØĖ ņÜ┤ļÅÖļ¬©ļō£ļŖö ņĀäĒøäļÅÖņÜö(Surge)ņÖĆ ņóīņÜ░ļÅÖņÜö(Sway)ņØ┤ļ®░, ņäĀņłśļÅÖņÜö(Yaw)ņØś Ļ▓ĮņÜ░ Ēä░ļĀø Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņø©ļŹöļ▓ĀņØ┤ļŗØ(Weather-vaning)ĒśäņāüņŚÉ ņØśĒĢ┤ ņ×ÉņŚ░ņĀüņ£╝ļĪ£ ļ│ĆĒÖöĒĢśļÅäļĪØ ĒŚłļØĮļÉśņŚłļŗż. PDņĀ£ņ¢┤ĻĖ░ņŚÉ ņé¼ņÜ®ļÉ£ Ļ▓īņØĖ(Gain)ņØĆ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Surge ļ░®Ē¢ź ņ×Éņ£ĀĻ░ÉņćĀņŗ£ĒŚś(Free decay test)ņ£╝ļĪ£ļČĆĒä░ ņé░ņČ£ļÉ£ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│Āņ£ĀņŻ╝ĻĖ░ļĪ£ļČĆĒä░ Ļ│äņé░ļÉśņŚłļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņé¼ņÜ®ļÉ£ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Surge ļ░®Ē¢ź Ļ│Āņ£ĀņŻ╝ĻĖ░ļŖö 90ņ┤łņØ┤ļ®░ PĻ▓īņØĖņØĆ Ļ│Āņ£ĀņŻ╝ĻĖ░, ĻĄ¼ņĪ░ļ¼╝ņØś ņ¦łļ¤ēĻ│╝ ļČĆĻ░Ćņ¦łļ¤ēņØä ņĀüņÜ®ĒĢśņŚ¼ Ļ│äņé░ĒĢśņśĆļŗż. DĻ▓īņØĖņØĆ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņ×äĻ│äĻ░ÉņćĀĻ│äņłśņØś 50%ļź╝ ņé¼ņÜ®ĒĢśņśĆņ£╝ļ®░ ņ¢╗ņ¢┤ņ¦ä ļ¬©ļōĀ Ļ▓īņØĖĻ░ÆļōżņØĆ Table 5ņŚÉ ņĀĢļ”¼ĒĢśņśĆļŗż.
5.2 Ļ▓░Ļ│╝ ļČäņäØ
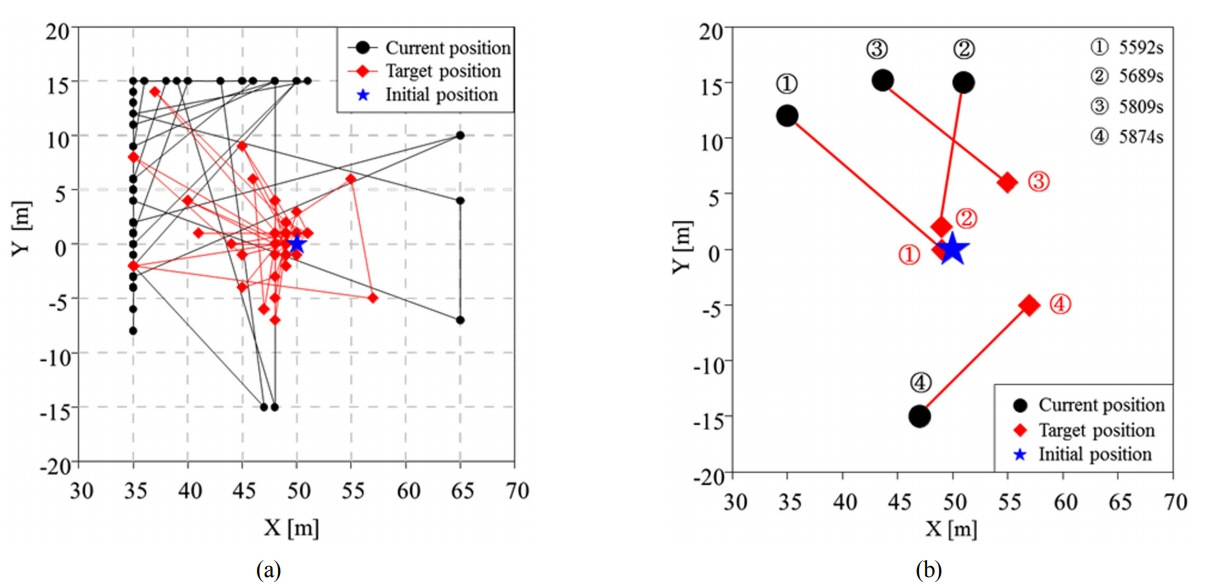
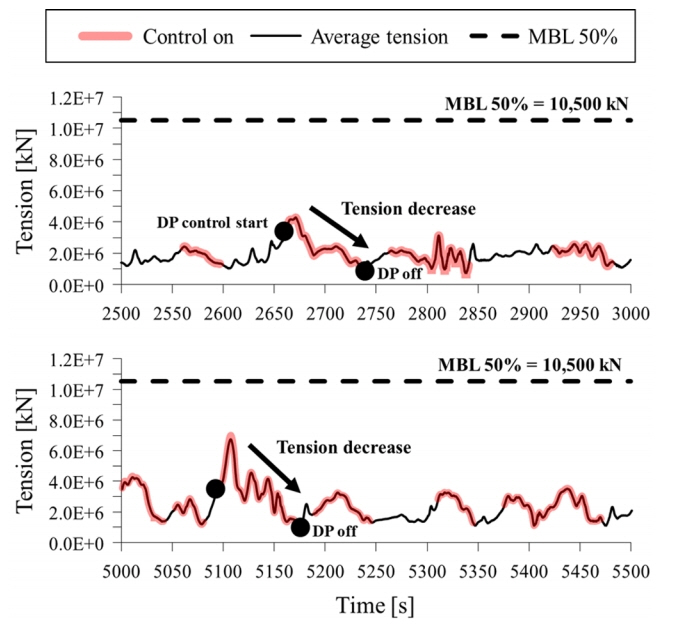
3ņŗ£Ļ░äņØś ņŗ£Ļ░äņśüņŚŁ ņŗ£ļ«¼ļĀłņØ┤ņģśņØ┤ ņ¦äĒ¢ēļÉśļŖö ļÅÖņĢł ĻĄ¼ņĪ░ļ¼╝ņØ┤ ņ┤łĻĖ░ņ£äņ╣śļĪ£ļČĆĒä░ Ļ│äļźśņŗ£ņŖżĒģ£ ņÖĆņ╣śņä£Ēü┤ņØś 50%ņØĖ 15mļź╝ ņ┤łĻ│╝ĒĢśĻ▒░ļéś Ļ│äļźśņäĀņØś MBL(Minimum breaking load)ņØś 50%ņØĖ 10,500kNņØä ņ┤łĻ│╝ĒĢśļ®┤ SPĻ░Ć ņāØņä▒ļÉśļ®┤ņä£ DP ņĀ£ņ¢┤Ļ░Ć ņŗ£ņ×æļÉ£ļŗż. ņןļĀź ņĪ░Ļ▒┤ņØś Ļ▓ĮņÜ░ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ļÅÖņĀü Ļ▒░ļÅÖņŚÉ ņØśĒĢ┤ ļ░£ņāØļÉĀ ņłś ņ׳ļŖö Ļ│╝ļÅäĒĢ£ ņןļĀźņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ£ ņĪ░Ļ▒┤ņØ┤ļŗż. ĒĢ┤ņ¢æ ĻĄ¼ņĪ░ļ¼╝ņØ┤ ņĀ£ņŗ£ļÉ£ ņĪ░Ļ▒┤ņØä ļ¦īņĪ▒ĒĢśņ¦Ć ļ¬╗Ē¢łņØä ļĢī, ņŚ░ļŻīĒÜ©ņ£©ņĀüņØĖ ņÜ┤ņśüņØä ņ£äĒĢśņŚ¼ DPņŗ£ņŖżĒģ£ņØĆ ņ×æļÅÖĒĢśņ¦Ć ņĢŖļÅäļĪØ ņäżņĀĢĒĢśņśĆļŗż. 3ņŗ£Ļ░äņØś ņŗ£ļ«¼ļĀłņØ┤ņģś ļÅÖņĢł ĻĄ¼ņĪ░ļ¼╝ņØĆ 71ļ▓ł ņĀ£ņ¢┤ņŗ£ņ×æ ņĪ░Ļ▒┤ņØä ļ¦īņĪ▒ĒĢśņśĆĻ│Ā, ņØ┤ņŚÉ ļö░ļØ╝ 71Ļ░£ņØś SPĻ░Ć Ļ│äņé░ļÉśņŚłļŗż. Fig. 7(a)ļŖö 3ņŗ£Ļ░ä ļÅÖņĢł Ļ│äņé░ļÉ£ SPņØś ņ£äņ╣śņÖĆ ļÅÖņØ╝ĒĢ£ ņŗ£Ļ░äņŚÉņä£ņØś ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śļź╝ ļéśĒāĆļéĖļŗż. Ļ│äņé░ļÉ£ SPĻ░ÆņØĆ ļīĆļČĆļČä ĻĄ¼ņĪ░ļ¼╝ņØś ņ┤łĻĖ░ ņ£äņ╣śņØĖ (50, 0)ņŚÉ Ļ░ĆĻ╣ØĻ▓ī ņäżņĀĢņØ┤ ļÉśĻ│Ā ņ׳ļŗż. Fig. 7(b)ļŖö 3ņŗ£Ļ░äņØś ņŗ£ļ«¼ļĀłņØ┤ņģś ņżæ 5,592ņ┤łņŚÉņä£ 5,874ņ┤ł ņé¼ņØ┤ņŚÉņä£ ņäĀĒāØļÉ£ 4Ļ░£ ņ£äņ╣śņŚÉņä£ņØś Ļ▓░Ļ│╝ļź╝ ļéśĒāĆļé┤Ļ│Ā ņ׳ļŗż. Ļ▓░Ļ│╝ ĻĘĖļלĒöäņŚÉ ļéśĒāĆļéĖ ņ┤łĻĖ░ ņ£äņ╣śļŖö Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņןļĀźņØ┤ Ļ░Ćņן ņĢłņĀĢņĀüņØĖ ņ£äņ╣śļź╝ ļéśĒāĆļéĖļŗż. ļö░ļØ╝ņä£ SPĻ░Ć ņןļĀźņØś Ļ░Éņåī ļ░®Ē¢źņ£╝ļĪ£ ņäżņĀĢļÉśĻ│Ā ņ׳ņØīņØä ņĢī ņłś ņ׳ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀ£ņŗ£ĒĢ£ SPĻ░Ć ĻĄ¼ņĪ░ļ¼╝ņØś ņ┤łĻĖ░ņ£äņ╣ś ļ░®Ē¢źņ£╝ļĪ£ Ļ│äņé░ņØ┤ ļÉśņ¦Ćļ¦ī ĒĢŁņāü ņ┤łĻĖ░ ņ£äņ╣śņØĖ (50, 0)ņ£╝ļĪ£ ņäżņĀĢņØ┤ ļÉśņ¦Ć ņĢŖļŖö Ļ▓āņØĆ DPņŗ£ņŖżĒģ£ņØś ļČłĒĢäņÜöĒĢ£ Ļ░ĆļÅÖņØä ņĄ£ņåīĒÖöĒĢśĻĖ░ ņ£äĒĢ©ņØ┤ļŗż. ļ¦īņĢĮ SPņäĀņĀĢ ņĢīĻ│Āļ”¼ņ”śņØ┤ ņŚåļŗżļ®┤, ĻĄ¼ņĪ░ļ¼╝ņŚÉ ņ╣śļ¬ģņĀüņØĖ ņśüĒ¢źņØä ļü╝ņ╣śņ¦Ć ņĢŖļŖö ņś©ļé£ĒĢ£ ĒÖśĻ▓ĮņĪ░Ļ▒┤ņŚÉņä£ļÅä SPĻ░Ć ĒĢŁņāü ĻĄ¼ņĪ░ļ¼╝ņØś ņ┤łĻĖ░ņ£äņ╣śļĪ£ ņäżņĀĢņØ┤ ļÉśņ¢┤ ņŚ░ļŻīņåīļ╣äņ£© ņĖĪļ®┤ņŚÉņä£ ļ╣äĒĢ®ļ”¼ņĀüņØĖ ņĀ£ņ¢┤ņĀäļץņØ┤ ļÉĀ Ļ▓āņØ┤ļŗż. ļö░ļØ╝ņä£ Fig. 7ņØś Ļ▓░Ļ│╝ļĪ£ļČĆĒä░ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀ£ņŗ£ĒĢ£ SP ņäĀņĀĢ ņĀäļץņØĆ ņןļĀźĻ│╝ ņ£äņ╣śļ│ĆĒÖö ņČöņØ┤ļź╝ Ļ│ĀļĀżĒĢśņŚ¼ ņŚ░ļŻīņåīļ╣äņ£© ņĖĪļ®┤ņŚÉņä£ ĒÜ©ņ£©ņĀüņØĖ SPļź╝ ņé░ņČ£ĒĢśĻ│Ā ņ׳ņØīņØä ņĢī ņłś ņ׳ļŗż.
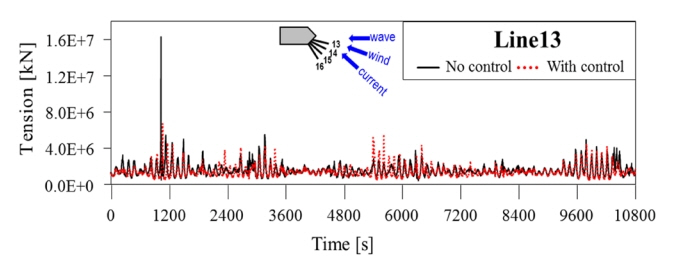
Fig. 8Ļ│╝ Fig. 9ļŖö ņןļĀźĻ░Éņåī SP ņĢīĻ│Āļ”¼ņ”śņØ┤ ņĀüņÜ®ļÉ£ DPņØś ņĀ£ņ¢┤ ņ£Āļ¼┤ņŚÉ ļö░ļźĖ Ļ│äļźśņŗ£ņŖżĒģ£ ņןļĀźņØä ĻĖ░ļĪØĒĢ£ ĻĘĖļלĒöäņØ┤ļŗż. Fig. 8ņØĆ ĒÖśĻ▓ĮĒĢśņżæņØ┤ Ļ░Ćņן Ēü¼Ļ▓ī ņ×æņÜ®ĒĢśļŖö 13, 14, 15, 16ļ▓łņØś Ļ│äļźśņäĀ ņżæ 13ļ▓ł ĻĘĖļ”¼Ļ│Ā Fig. 9ļŖö 15ļ▓łņØś Ļ│äļźśņäĀņŚÉ ļīĆĒĢ£ ņןļĀźņØä ļéśĒāĆļéĖļŗż. ļæÉ Ļ▓░Ļ│╝ļĪ£ļČĆĒä░ SPļĪ£ņØś ņĀ£ņ¢┤Ļ░Ć ņ׳ļŖö Ļ▓ĮņÜ░ņŚÉ ņĄ£ļīĆ ņןļĀźņØĆ ņĀ£ņ¢┤Ļ░Ć ņŚåļŖö Ļ▓ĮņÜ░ņŚÉ ļ╣äĒĢ┤ ņĀäļ░śņĀüņ£╝ļĪ£ ņżäņ¢┤ļōżņŚłņØīņØä ņĢī ņłś ņ׳ļŗż. ĒŖ╣Ē׳ 1,100ņ┤łĻ▓Į ļ░£ņāØļÉ£ Ļ│╝ļÅäĒĢ£ ņןļĀźņØĆ ņĀ£ņ¢┤ļĪ£ ņØĖĒĢśņŚ¼ ņĄ£ļīĆ ņןļĀźņØ┤ ņĢĮ 37%ļĪ£ ņżäņ¢┤ļōżņ¢┤ Ļ░£ļ░£ļÉ£ SP ņĢīĻ│Āļ”¼ņ”śņØś ņ£ĀĒÜ©ņä▒ņØä Ļ┤Ćņ░░ĒĢĀ ņłś ņ׳ļŗż.
Fig. 10ņØĆ 3ņŗ£Ļ░äņØś ņŗ£ļ«¼ļĀłņØ┤ņģśņ£╝ļĪ£ļČĆĒä░ ņé░ņČ£ļÉ£ Ļ░ü Ļ│äļźśņäĀņØś ņןļĀź ņżæ, ņןļĀźņØ┤ ņ▓½ ļ▓łņ¦ĖņÖĆ ļæÉ ļ▓łņ¦ĖļĪ£ Ēü¼Ļ▓ī ņ×æņÜ®ĒĢśļŖö Ļ│äļźśņäĀņØś ĒÅēĻĘĀņØä ļ¦ż ņŗ£Ļ░äņ”ØļČäļ¦łļŗż Ļ│äņé░ĒĢśņŚ¼ ļéśĒāĆļéĖ Ļ▓░Ļ│╝ ĻĘĖļלĒöäņØ┤ļŗż. ļö░ļØ╝ņä£ ļ¦ż ņŗ£Ļ░äņ”ØļČäļ¦łļŗż ņןļĀźņØ┤ ņ▓½ ļ▓łņ¦ĖņÖĆ ļæÉ ļ▓łņ¦ĖļĪ£ Ēü¼Ļ▓ī ņ×æņÜ®ĒĢśļŖö Ļ│äļźśņäĀņØĆ ļ│ĆļÅÖļÉĀ ņłś ņ׳ļŗż. ĻĄĄĻ▓ī ļŹ¦ņ╣ĀļÉ£ ĻĄ¼Ļ░äņØĆ FPSOņØś Ļ▒░ļÅÖ ļ░Å ņןļĀźņØś ļ│ĆĒÖöĻ░Ć ņĢīĻ│Āļ”¼ņ”ś ņ×æļÅÖņĪ░Ļ▒┤ņŚÉ ĒĢ┤ļŗ╣ĒĢśņŚ¼ SPĻ░Ć Ļ│äņé░ļÉśĻ│Ā DPņØś ņĀ£ņ¢┤Ļ░Ć Ļ░ĆļÅÖļÉśļŖö ĻĄ¼Ļ░äņØ┤ļŗż. 10,800ņ┤łņØś Ļ▓░Ļ│╝ ņżæ 2,500~3,000ņ┤łņÖĆ 5,000~5,500ņ┤łņØś Ļ▓░Ļ│╝ļź╝ ļéśĒāĆļāłņ£╝ļ®░ ĒĢ┤ļŗ╣ ņŗ£Ļ░äņŚÉņä£ņØś DP ņ×æļÅÖ ņĪ░Ļ▒┤ņØĆ ņ£äņ╣śļ│ĆĒÖöņŚÉ ņØśĒĢ£ ņĪ░Ļ▒┤ņØ┤ļŗż. SPņĀ£ņ¢┤Ļ░Ć ņ×æļÅÖĒĢśļŖö ļīĆļČĆļČäņØś ĻĄ¼Ļ░äņŚÉņä£ ņןļĀźņØ┤ Ļ░ÉņåīĒĢśļŖö Ļ▓āņØä ļ│╝ ņłś ņ׳ļŗż. ņØ┤ļŖö Ļ│äņé░ļÉ£ SPĻ░Ć Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņןļĀźļČĆĒĢś Ļ░Éņåīļź╝ ņä▒Ļ│ĄņĀüņ£╝ļĪ£ ņłśĒ¢ēĒĢśĻ│Ā ņ׳ņØīņØä ļéśĒāĆļéĖļŗż.
6. Ļ▓░ ļĪĀ
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ļČĆņ£ĀņŗØ ĒĢ┤ņ¢æĻĄ¼ņĪ░ļ¼╝ņØś Ļ│╝ļÅäĒĢ£ Ēæ£ļźśņÖĆ ņןļĀź ņāüņŖ╣ņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ£ DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØś SP ņäĀņĀĢ ņĀäļץņØä ņĀ£ņŗ£ĒĢśņśĆļŗż. SPļŖö ņןļĀźņØś Ļ░Éņåīļź╝ ļ¦īņĪ▒ĒĢśļŖö ņ£äņ╣śļĪ£ ņäĀņĀĢļÉśņ¢┤ņĢ╝ ĒĢśļ®░ ņØ┤ļ¤¼ĒĢ£ SP ņäĀņĀĢņØä ņ£äĒĢśņŚ¼ ņןļĀź ņČöņĖĪņØ┤ļØ╝ļŖö ņĀäļץņØä ņĀ£ņŗ£ĒĢśņśĆļŗż. ņןļĀźņØä ņČöņĖĪĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ĻĄ¼ņĪ░ļ¼╝ņØś ņ£äņ╣śņÖĆ ņןļĀź ļ│ĆĒÖöņČöņØ┤ļź╝ Ļ│ĀļĀżĒĢ£ ĻĄŁņåīņןļĀźĻ│╝ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņĀĢņĀüĒĢ┤ņäØņØä ĒåĄĒĢ┤ ņé░ņČ£ļÉ£ ņĀäņŚŁņןļĀźņØä ĒĢ©Ļ╗ś ņØ┤ņÜ®ĒĢśļŖö ļ░®ļ▓ĢņØä ņåīĻ░£ĒĢśņśĆļŗż. DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØä ņĀüņÜ®ĒĢ£ ļČĆņ£ĀņŗØ ĻĄ¼ņĪ░ļ¼╝ņŚÉ ļīĆĒĢ┤ 3ņŗ£Ļ░ä ĒĢ┤ņäØņØä ņłśĒ¢ēĒĢśņŚ¼ ņĀ£ņŗ£ļÉ£ SP ņäĀņĀĢļ▓ĢņØś ņŗżĒśä Ļ░ĆļŖźņä▒Ļ│╝ ņä▒ļŖźņØä ĒīÉļŗ©ĒĢśņśĆļŗż. ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ļĪ£ļČĆĒä░, ņäĀņĀĢļÉ£ SPļĪ£ ĻĄ¼ņĪ░ļ¼╝ņØä ņĀ£ņ¢┤ĒĢśļŖö ļÅÖņĢł ņĄ£ļīĆ ņןļĀźņØ┤ Ļ░ÉņåīĒĢśļŖö Ļ▓āņØä ņĢī ņłś ņ׳ņŚłļŗż. ļö░ļØ╝ņä£ ņĀ£ņĢłļÉ£ SP ņäĀņĀĢ ņĀäļץņØĆ Ļ│╝ļÅäĒĢ£ ņןļĀźņØ┤ ņ×æņÜ®ĒĢśļŖö Ļ▓āņØä ļ░®ņ¦ĆĒĢśĻ│Ā, ņ¦ĆņåŹņĀüņ£╝ļĪ£ ĻĄ¼ņĪ░ļ¼╝ņØ┤ ņ£äņ╣śĻ▓ĮĻ│äņĪ░Ļ▒┤ ļé┤ņŚÉ ņ£äņ╣śĒĢśļÅäļĪØ DPļ│┤ņĪ░Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņĀ£ņ¢┤Ļ░Ć Ļ░ĆļŖźĒĢ©ņØä ĒÖĢņØĖĒĢśņśĆļŗż.