


1. žĄú Ž°†
žąėž§Ď ͳĎ̾žĚīŽćĒŽäĒ ŽįĒŽč§ žÜćžĚĄ Žč§ŽčąŽ©īžĄú ŪēīžĖĎ žÉĚŪÉúÍ≥ĄžôÄ Ūēīž†Ä žßÄŪėē ŽďĪžĚĄ ŪÉźžÉČ ŽįŹ ž†ēžįį Ūē† žąė žěąŽäĒ žóźŽĄąžßÄÍįÄ ž†ĀÍ≤Ć ŽďúŽäĒ žĶúžč†žě•ŽĻĄžĚīŽč§. ŽėźŪēú žĶúÍ∑ľ ÍĶ≠Žāī Žč§žąėžĚė žóįÍĶ¨ÍłįÍīĞ󟞥úŽŹĄ Ž¨īžĚł žąėž§Ď ͳĎ̾žĚīŽćĒ ÍįúŽįúžĚĄ Ž™©ž†ĀžúľŽ°ú ŪēĶžč¨Íłįžą† ÍįúŽįúžóź Žįēžį®Ž•ľ ÍįÄŪēėÍ≥† žěąŽäĒ žÉĀŪô©žĚīŽč§. Ž≥ł ŽÖľŽ¨łžóźžĄúŽäĒ žąėž§Ď ͳĎ̾žĚīŽćĒžĚė žěźžú®ž†úžĖīŽ•ľ žúĄŪēú ž°įžĘÖžöīŽŹôŽį©ž†ēžčĚžóź ŪēĄžöĒŪēú žú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽď§žĚĄ žįĺŽäĒŽćį Ž™©ž†ĀžĚī žěąžúľŽ©į, žĚī žú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽ•ľ ž∂Ēž†ēŪēėÍłį žúĄŪēī VPMM(Vertical planar motion mechanism) žčúŪóėžĚĄ žč§žčúŪēėžėÄŽč§. VPMM žčúŪóėžĚÄ Heave žôÄ Pitch žöīŽŹôžóź ÍīÄŽ†®Žźú Ž∂ÄÍįÄžßąŽüČÍ≥ľ Íįźžá†Ž†• ŽďĪžĚĄ Ūē®ÍĽė ÍĶ¨ŪēėŽäĒ žčúŪóėžúľŽ°úžĄú žě†žąė žöīŽŹôž≤īžôÄ žĄ†Žįē ŽďĪžĚė žĄ§Í≥ĄžóźžĄú ž†ēŪôēŪēú ž°įžĘÖ žĄĪŽä•žĚė ž∂Ēž†ēžĚĄ žúĄŪēī Ūôúžö©ŽźėÍ≥† žěąŽč§(Lee and Kwon, 2002). ŪēúŪéł, ÍĶ≠ŽāīžóźžĄúŽäĒ žąėžÉĀžĄ†žĚĄ ŽĆÄžÉĀžúľŽ°ú Ūēú ÍĶ¨žÜ掙®ŪėēžčúŪóė(Yun and Kim, 2012; Shin and Choi, 2011) ŽėźŽäĒ žčúžä§ŪÖú žčĚŽ≥ĄŽ≤ēžĚĄ žĚīžö©Ūēú žú†ž≤īŽ†• Í≥Ąžąė ž∂Ēž†ēžóź ÍīÄŪēú žóįÍĶ¨(Lee and Kwon, 2002; Yoon and Son, 2004) ŽďĪžĚī žěąžúľŽāė, Ž≥ł ŽÖľŽ¨łžĚė žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®Ūėēžóź ŽĆÄŪēú VPMM žčúŪóėžĚÄ Žß§žöį ŽďúŽ¨ł žā¨Ž°ÄžĚīŽč§. ŽĒįŽĚľžĄú Ž≥ł ŽÖľŽ¨łžóźžĄúŽäĒ žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚĄ žÜ掏Ą UŽ°ú žėąžĚłŪēėŽ©īžĄú žąúžąė žÉĀŪēėŽŹôžöĒžöīŽŹô (Pure heave motion), žąúžąė žĘÖŽŹôžöĒžöīŽŹô(Pure pitch motion)žöīŽŹôžĚĄ ÍįĀÍįĀ Ž∂ÄÍįÄŪēėžėÄÍ≥†, žĚīŽēĆ Ž∂ÄÍįÄŽźėŽäĒ ŪěėÍ≥ľ Ž™®Ž©ėŪ䳎•ľ Ž™®ŪėēžĚė žĄ†žąė‚čÖžĄ†ŽĮł Ž∂ÄŽ∂Ąžóź žě•žį©Žźú Ž°úŽďúžÖĞ̥ žĚīžö©Ūēėžó¨ ŽćįžĚīŪĄįŽ•ľ ŪöćŽďĚŪēėžėÄŽč§. Í∑łŽ¶¨Í≥† Ūﮎ¶¨žóź ŪēīžĄĚžĚĄ ŪÜĶŪēú žąėž§Ď ͳĎ̾žĚīŽďú Ž™®ŪėēžĚė žĄ†Ūėē žú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽď§žĚĄ ž∂Ēž†ēŪēėžėÄžúľŽ©į, Ž≥ł žč§ŪóėžĚĄ ŪÜĶŪēī ž∂Ēž†ēŪēú žú†ž≤īŽ†• Í≥ĄžąėŽ•ľ žĚīžö©Ūēėžó¨ žöīŽŹô ž†úžĖīžčúŽģ¨Ž†ąžĚīžÖėžĚĄ žč§žčúŪēėžėÄŽč§.
2. žöīŽŹô Žį©ž†ēžčĚ
2.1 žĘĆŪĎúÍ≥ĄžôÄ žöīŽŹôŽį©ž†ēžčĚ
žąėž§Ď ͳĎ̾žĚīŽćĒžĚė žöīŽŹô Íłįžą†žĚĄ žúĄŪēī žĘĆŪĎúÍ≥ĄŽ•ľ Fig. 1Í≥ľ ÍįôžĚīžĄ§ž†ēŪēėžėÄŽč§(Lamb, 1945).
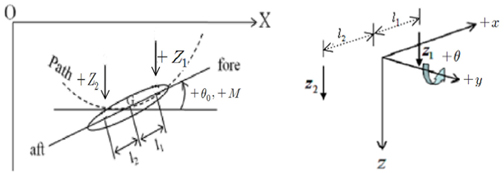
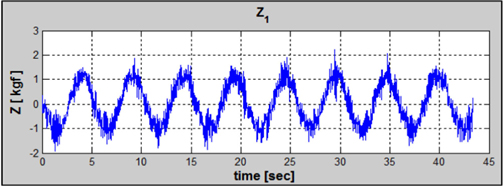
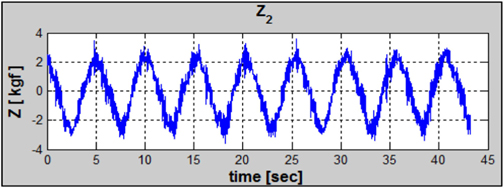
žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚė žĄ†žąė‚čÖžĄ†ŽĮł Ž∂ÄŽ∂Ąžóź žě•žį©Žźú Ž°úŽďúžÖĞ̥ žĚīžö©Ūēėžó¨ ž†ĄŪõĄ Strutžóź ÍĪłŽ¶¨ŽäĒ Heave force Z1, Z2 žĚĄ ŪöćŽďĚŪēėÍ≥†, Ž™®Ūėē ž†Ąž≤īžóź ÍĪłŽ¶¨ŽäĒ Heave ForcežôÄ Pitch MomentŽäĒ Žč§žĚĆ žčĚ (1)Í≥ľ žčĚ (2)žôÄ ÍįôžĚī ŽāėŪÉÄŽāłŽč§.


žąėž§Ď ͳĎ̾žĚīŽćĒžóź ž†Āžö©ŽźėŽäĒ 6 žěźžú†ŽŹĄ žöīŽŹôŽį©ž†ēžčĚžĚÄ REMUS (Remote Environmental Monitoring Unit) Ž™®Žćł(Prestero, 2001) žĚė žöīŽŹôŽį©ž†ēžč̞̥ žĪĄŪÉĚŪēėžėÄžúľŽ©į, Ž≥ł žč§ŪóėžĚė ŪēīžĄĚžóź žĚīžö©Žźú žöīŽŹôŽį©ž†ēžčĚžĚÄ žĄ†ŪėēŪē≠Žßƞ̥ Í≥†Ž†§Ūēú Heave-Pitch žóįžĄĪ žöīŽŹôŽį©ž†ēžč̞̥ žā¨žö©ŪēėžėÄŽč§. žĚīžóź ÍīÄŪēú žčĚžĚÄ Žč§žĚĆÍ≥ľ ÍįôžĚī ŪĎúŪėĄŽźúŽč§.


žó¨ÍłįžĄú mžĚÄ Ž™®ŪėēžĚė žßąŽüČ, UŽäĒ Ž™®ŪėēžĚė Ūē©žÜ掏Ą, ZŠļážĚÄ zž∂ē Žį©ŪĖ•žĚė ÍįÄžÜ掏Ą Šļážóź ÍīÄŪēú Ž∂ÄÍįÄžßąŽüČÍ≥Ąžąė, xGŽäĒ xž∂ē Žį©ŪĖ•žĚė Ž¨īÍ≤Ćž§Ďžč¨, ZwŽäĒ zž∂ē Žį©ŪĖ•žĚė žÜ掏Ą wžóź ÍīÄŪēú Íįźžá†Í≥Ąžąė, ZqŽäĒ ÍįĀžÜ掏Ą qžóź ÍīÄŪēú ZŽ†•,  ŽäĒ ÍįĀÍįÄžÜ掏Ą
ŽäĒ ÍįĀÍįÄžÜ掏Ą  žóź ÍīÄŪēú ZŽ†•, IyyŽäĒ yž∂ēžóź ÍīÄŪēú ÍīÄžĄĪŽ™®Ž©ėŪäł,
žóź ÍīÄŪēú ZŽ†•, IyyŽäĒ yž∂ēžóź ÍīÄŪēú ÍīÄžĄĪŽ™®Ž©ėŪäł,  ŽäĒ yž∂ēžóź ÍīÄŪēú Ž∂ÄÍįÄ ÍīÄžĄĪ Ž™®Ž©ėŪäł, MwŽäĒ zž∂ē Žį©ŪĖ•žĚė žÜ掏Ą wžóź ÍīÄŪēú Ž™®Ž©ėŪäł, MŠļáŽäĒ zž∂ē Žį©ŪĖ•žĚė ÍįÄžÜ掏Ą Šļážóź ÍīÄŪēú Ž™®Ž©ėŪ䳎•ľ ŽāėŪÉÄŽāłŽč§, ŽėźŪēú žöįŪē≠žóźžĄúŽäĒ žôłŽ∂Ğ󟞥úžĚė Ūěė ZE‚Ä≤, Ž™®Ž©ėŪäł MEŽ•ľ ÍįĀÍįĀ ŽāėŪÉÄŽāłŽč§(Newman, 1978).
ŽäĒ yž∂ēžóź ÍīÄŪēú Ž∂ÄÍįÄ ÍīÄžĄĪ Ž™®Ž©ėŪäł, MwŽäĒ zž∂ē Žį©ŪĖ•žĚė žÜ掏Ą wžóź ÍīÄŪēú Ž™®Ž©ėŪäł, MŠļáŽäĒ zž∂ē Žį©ŪĖ•žĚė ÍįÄžÜ掏Ą Šļážóź ÍīÄŪēú Ž™®Ž©ėŪ䳎•ľ ŽāėŪÉÄŽāłŽč§, ŽėźŪēú žöįŪē≠žóźžĄúŽäĒ žôłŽ∂Ğ󟞥úžĚė Ūěė ZE‚Ä≤, Ž™®Ž©ėŪäł MEŽ•ľ ÍįĀÍįĀ ŽāėŪÉÄŽāłŽč§(Newman, 1978).
ŽäĒ ÍįĀÍįÄžÜ掏Ą žóź ÍīÄŪēú ZŽ†•, IyyŽäĒ yž∂ēžóź ÍīÄŪēú ÍīÄžĄĪŽ™®Ž©ėŪäł, ŽäĒ yž∂ēžóź ÍīÄŪēú Ž∂ÄÍįÄ ÍīÄžĄĪ Ž™®Ž©ėŪäł, MwŽäĒ zž∂ē Žį©ŪĖ•žĚė žÜ掏Ą wžóź ÍīÄŪēú Ž™®Ž©ėŪäł, MŠļáŽäĒ zž∂ē Žį©ŪĖ•žĚė ÍįÄžÜ掏Ą Šļážóź ÍīÄŪēú Ž™®Ž©ėŪ䳎•ľ ŽāėŪÉÄŽāłŽč§, ŽėźŪēú žöįŪē≠žóźžĄúŽäĒ žôłŽ∂Ğ󟞥úžĚė Ūěė ZE‚Ä≤, Ž™®Ž©ėŪäł MEŽ•ľ ÍįĀÍįĀ ŽāėŪÉÄŽāłŽč§(Newman, 1978).2.2 Pure heave test
žąúžąė žÉĀŪēėŽŹôžöĒ žöīŽŹôžĚÄ Fig. 2žóź ÍįúŽěĶž†ĀžúľŽ°ú ŽāėŪÉÄŽāł ŽįĒžôÄ ÍįôžĚī ŪöĆŽĎźžöīŽŹôžĚĄ ŪēėžßÄ žēäÍ≥†, Í∑ł ž§Ďžč¨žĚė Í∂§ž†ĀžĚī ž†ēŪėĄŪĆĆžĚė Ž™®žĖĎžúľŽ°ú Ž≥ÄŪôĒŪēėŽäĒ Í≤ÉžĚīŽĚľ Ūē† žąė žěąŽč§.



žčĚ (5), (6)Ž•ľ žčĚ (3), (4)žóź ÍįĀÍįĀ ŽĆÄžěÖŪēėŽ©ī,


ŪēúŪéł ZE , ME Ž•ľ žöīŽŹôžĚė ŽŹô-žúĄžÉĀ(In-phase) žĄĪŽ∂ĄÍ≥ľ Žįė-žúĄžÉĀ (Out-of-phase) žĄĪŽ∂ĄžúľŽ°ú ÍįĀÍįĀ Ž∂ĄŽ¶¨ŪēėŽ©ī žēĄŽěėžôÄ ÍįôŽč§. žó¨ÍłįžĄú Ž∂ÄÍįÄžßąŽüČžĚÄ ÍįÄžÜ掏Ąžóź ÍīÄŽ†®ŽźúŽč§. ŽĒįŽĚľžĄú Ž≥ÄžúĄžôÄ ÍįôžĚÄ sine Ūē®žąėžĚīŽĮÄŽ°ú In-phaseŽ°ú ŽāėŪÉÄŽāīÍ≥†, Íįźžá†Ž†•žĚÄ žÜ掏Ą w žóź ÍīÄŽ†®ŽźėÍ≥†, Ž≥ÄžúĄžôÄžĚė žúĄžÉĀžį®ÍįÄ 90¬įžĚł cosine Ūē®žąėžĚīŽĮÄŽ°ú Out-of phaseŽ°ú ŽāėŪÉÄŽāłŽč§.


žčĚ (9), (10)žĚĄ žčĚ (7), (8)žóź ŽĆÄžěÖŪēėžó¨ ž†ēŽ¶¨ŪēėŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.


2.3 Pure pitch test
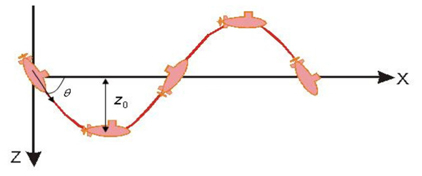
žąúžąė žĘÖŽŹôžöĒ žöīŽŹôžĚÄ Fig. 3žóźžĄú ŽāėŪÉÄŽāł ŽįĒžôÄ ÍįôžĚī žĄ†ž≤ī ž§Ďžč¨ Í∂§ž†ĀžĚī ž†ēŪėĄžöīŽŹô(Sinusoidal motion)žĚė Ž™®žĖĎžúľŽ°ú žöīŽŹôŪēėÍ≥†, žĄ†ž≤īÍįÄ ž†ēŪėĄž†ĀžĚł ŪöĆŽĎź žöīŽŹôžĚĄ ŪēúŽč§. ŽĒįŽĚľžĄú Ūē©žÜ掏Ą U žĚė Žį©ŪĖ•žĚÄ Ūē≠žÉĀ žĄ†ž≤ī ž§Ďžč¨žĄ†žĚė Žį©ŪĖ•žĚīÍ≥† žĚīŽ•ľ Pure PitchŽĚľ Ž∂ÄŽ•łŽč§.


žó¨ÍłįžĄú őł0 ŽäĒ ŪĒľžĻė(Pitch) ÍįĀžöīŽŹôžĚė žīąÍłįžßĄŪŹ≠žĚĄ žĚėŽĮłŪēúŽč§. žčĚ (13), (14)Ž•ľ žčĚ (3), (4)žóź ŽĆÄžěÖŪēėŽ©ī,


žĚīž†ú ZE , ME žĚĄ žöīŽŹôžĚė ŽŹô-žúĄžÉĀ(In-phase) žĄĪŽ∂ĄÍ≥ľ Žįė-žúĄžÉĀ (Out-of-phase) žĄĪŽ∂ĄžúľŽ°ú Ž∂ĄŽ¶¨ŪēúŽč§. Pitch Ž∂ÄÍįÄÍīÄžĄĪŽ™®Ž©ėŪ䳎äĒ ÍįĀ ÍįÄžÜ掏Ą žĚė Ūē®žąėžĚīÍ≥†, Pitch ÍįĀ Ž≥ÄžúĄ(őł)žôÄ ÍįôžĚÄ Cosine Ūē®žąėžĚīŽĮÄŽ°ú őłžôÄ In-phasežĚīÍ≥†, Pitch ÍįĀžÜ掏Ą qŽäĒ Pitch damping Mqžóź ÍīÄŽ†®ŽźėŽ©į, ÍįĀ Ž≥ÄžúĄ(őł)žôÄ 90¬įžúĄžÉĀžį®Ž•ľ ÍįÄžßÄŽäĒ sine Ūē®žąėžĚīŽĮÄŽ°ú Out-of-phaseŽ°ú ŽāėŪÉÄŽāúŽč§.


žčĚ (17), (18)žĚĄ žčĚ (15), (16)žóź ŽĆÄžěÖŪēėžó¨ ž†ēŽ¶¨ŪēėŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.


2.4 Ūﮎ¶¨žóź ŪēīžĄĚ
ŽŹôž†ĀžčúŪóėžĚė Í≤Ĺžöįžóź žč§ž†ú Ž°úŽďúžÖĞ󟞥ú Í≥Ąžł°Žźú žč†ŪėłžóźŽäĒ Ž™®ŪėēžĄ†žóź žěĎžö©ŪēėŽäĒ žú†ž≤īŽŹôŽ†•Ūēôž†Ā ÍīÄžĄĪŽ†•Í≥ľ Íįźžá†Ž†•žĚī ŪŹ¨Ūē®ŽźėžĖī žěąžĖī žĚīŽ•ľ Ž∂ĄŽ¶¨Ūēėžó¨ žąėŪēôŽ™®Ūėēžóź ŽßěŽäĒ žú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽ•ľ ÍĶ¨Ūē† žąė žěąŽč§. ŽĒįŽĚľžĄú Í≥Ąžł°Žźú žč†ŪėłŽ•ľ Fourier sine ŽėźŽäĒ cosineŽ≥ÄŪôėžĚĄ ŪēėÍ≥† 1ž£ľÍłįÍĻĆžßÄ ž†ĀŽ∂ĄŪēėŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.

žó¨ÍłįžĄú ZE ŽäĒ žč§ŪóėžóźžĄú Í≥Ąžł°Žźú žč†ŪėłžĚīÍ≥† TŽäĒ ž£ľÍłįžĚīŽč§. Zin žĚÄ Ž≥ÄžúĄžôÄ ÍįôžĚÄ žúĄžÉĀžĚĄ ÍįĖŽäĒ ÍīÄžĄĪŽ†•Í≥ľ Ž∂ÄÍįÄžßąŽüČŽ†•žĚĄ ŪŹ¨Ūē®Ūēú ŪěėžĚīÍ≥† Zout žĚÄ Ž≥ÄžúĄžôÄ 90¬įžĚė žúĄžÉĀžį®Ž•ľ ÍįĖŽäĒ Íįźžá†Ž†•žĚĄ žĚėŽĮłŪēúŽč§.
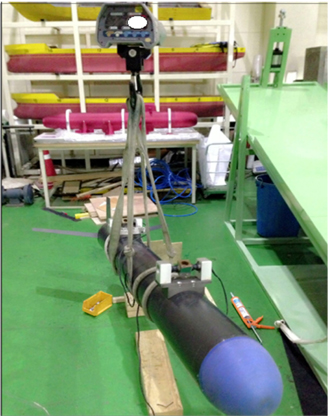
3. žě•ŽĻĄžÜĆÍįú ŽįŹ žā¨žö©Žį©Ž≤ē
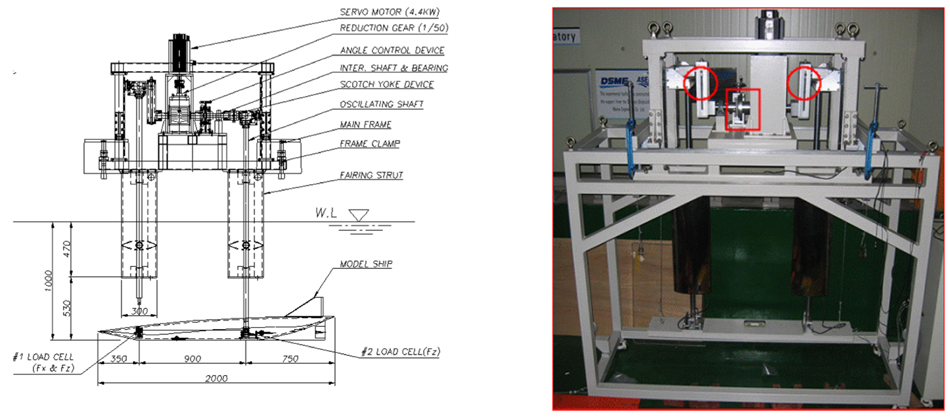
3.1 VPMM žě•ŽĻĄ
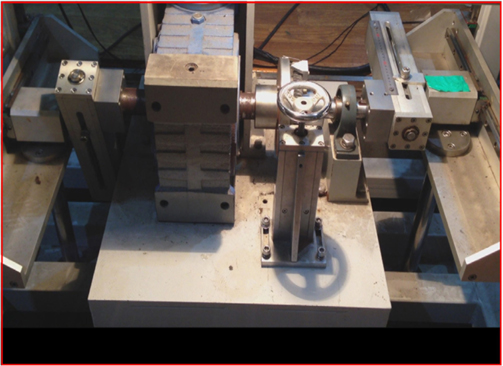
Scotch yokežĚė Arm ÍłłžĚīŽ•ľ ž°įž†ąŪēėžó¨(Fig. 4žĚė žöįžł° žā¨žßĄ ‚óč Ž∂ÄŽ∂Ą)žßĄŪŹ≠žĚĄ ž°įž†ąŪē† žąė žěąžúľŽ©į 0m ~ 0.3m ÍĻĆžßÄ žßĄŪŹ≠ ž°įž†ąžĚī ÍįÄŽä•ŪēėŽč§. Pure heave žöīŽŹô ŽėźŽäĒ Pure pitch žöīŽŹô Ž™®ŽĎź žĄ†žąė‚čÖžĄ†ŽĮłžóź ŽėĎÍįôžĚī žõźŪēėŽäĒ žßĄŪŹ≠ ÍįížĚĄ ž†Āžö©ŪēúŽč§. Pure pitch motionžĚė Í≤Ĺžöį, Fig. 4žĚė žöįžł° žā¨žßĄ ‚Ė°Ž∂ÄŽ∂ĄžĚĄ žĚīžö©Ūēėžó¨ Ūēúž™Ĺ žõźŪĆźžĚĄ Í≥ĄžāįŽźú žúĄžÉĀÍįĀ ŌĶp¬į ŽßĆŪĀľ ŽŹĆŽ¶¨Ž©ī, žēě‚čÖŽí§ StrutžĚė žõÄžßĀžěĄžóźŽäĒ ŌĶp¬į ŽßĆŪĀľ žúĄžÉĀžį®ÍįÄ ŽįúžÉĚŪēėÍ≤Ć ŽźúŽč§. Fig. 5žĚÄ žĄ†žąėžôÄ žĄ†ŽĮłžóź 70¬įžĚė žúĄžÉĀžį®Ž•ľ ž§Ä Ž™®žäĶžĚīŽč§.
žúĄžÉĀÍįĀ ŌĶpŽ•ľ ÍĶ¨ŪēėŽäĒ Í≥ľž†ēžĚÄ Žč§žĚĆÍ≥ľ ÍįôŽč§.


ŪēúŪéł, žēěŽí§ StrutžĚė Heave Ž≥ÄžúĄŽ•ľ z1 , z2ŽĚľ ŪēėŽ©ī ž†Ąž≤īŽ°úžĄúžĚė Heave Ž≥ÄžúĄ zŽäĒ,



z1 , z2 ÍįÄ žúĄžÉĀÍįĀ ŌĶ1 , ŌĶ2 žĚĄ ÍįÄžßÄŽ©į ž†ēŪėĄž†ĀžúľŽ°ú Ž≥ÄŪôĒŪēėŽ©ī,


žĚīŽēĆ žĄ†žąė ŽįŹ žĄ†ŽĮłžóźžĄúžĚė žúĄžÉĀÍįĀ ŌĶ1 , ŌĶ2 ŽįŹ žúĄžÉĀžį® ŌĶp = ŌĶ2 ‚Äď ŌĶ1 ŽäĒ žčĚ (29), (30)žôÄ ÍįôŽč§.


žó¨ÍłįžĄú LžĚÄ žēě‚čÖŽí§ Strut žā¨žĚī ÍĪįŽ¶¨ L = l1 + l2 Ž•ľ žĚėŽĮłŪēúŽč§.
4. Ž™®ŪėēžčúŪóė Í≤įÍ≥ľ ŽįŹ ŪēīžĄĚ
4.1 žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®Ūėēž†úžõź
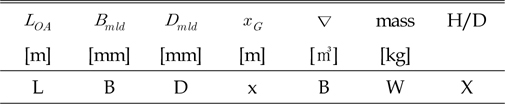
žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚė ÍłįŽ≥ł ŽćįžĚīŪĄįŽäĒ Table 1Í≥ľ ÍįôŽč§.
4.2 Pure heave test
T = T1(s), z0 = A1(m), U= U1(knot)Ž°ú žĄ§ž†ēŪēėžó¨ ŽćįžĚīŪĄįŽ•ľ ŪöćŽďĚŪēī Ž≥īžēėŽč§. Ž®ľž†Ä žĄ†žąė‚čÖžĄ†ŽĮłžóź ÍĪłŽ¶¨ŽäĒ ŪěėžĚĄ Í∑łŽěėŪĒĄŽ°ú Í∑łŽ†§Ž≥īŽ©ī Fig. 7 ~ 8Í≥ľ ÍįôŽč§.
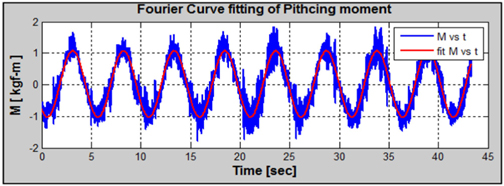
žčĚ (1), (2)Ž•ľ žĚīžö©Ūēėžó¨ Ž™®ŪėēžĚī ŽįõŽäĒ ž†Ąž≤ī Heave force ŽįŹ Pitch momentŽ•ľ ÍĶ¨ŪēėŽ©ī Fig. 9 ~ 10Í≥ľ ÍįôŽč§.
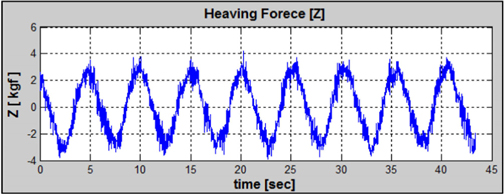
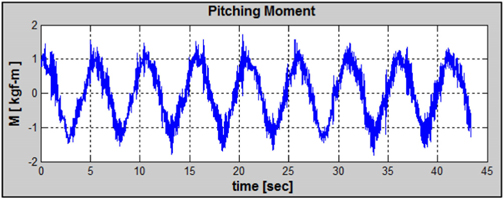
Fig. 9 ~ 10žĚĄ Ž≥īŽ©ī žĄ§ž†ē ž£ľÍłį 5žīąžôÄ žč§ž†ú žöīŽŹô ž£ľÍłįžôÄ žį®žĚīÍįÄ ŽįúžÉĚŪē®žĚĄ žēĆ žąė žěąŽč§. ŽĒįŽĚľžĄú ŪĎłŽ¶¨žóź Ž≥ÄŪôėžĚĄ Ūēėžó¨ ž†ēŪôēŪēú ž£ľÍłįŽ•ľ ŪôēžĚłŪē† žąė žěąžóąŽč§.
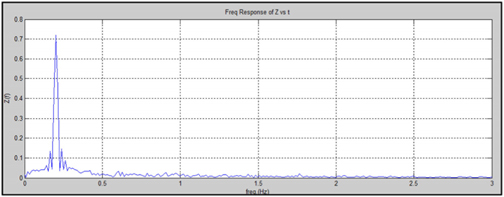
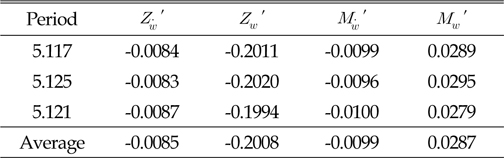
žúĄžĚė Í∑łŽěėŪĒĄŽ•ľ Ž≥īŽ©ī 0.2Hz Ž∂ÄÍ∑ľžóźžĄú ŪäĻž†ē ÍįížĚī ŽĆÄŽč®Ūěą ŽÜížĚī ŽāėŪÉÄŽā®žĚĄ žēĆ žąė žěąŽč§. žĚī ÍįížĚī žĚī žöīŽŹôžĚė ž£ľÍłįÍįÄ ŽźėŽ©į ŽāėŽ®łžßÄ žěĎžĚÄ ÍįíŽď§žĚÄ ŽÖłžĚīž¶ąžóź ŪēīŽčĻŽźúŽč§. žĚī ŪäĻž†ē ÍįížĚĄ žįĺžúľŽ©ī 0.195Hz žĚīÍ≥† žĚīŽ•ľ ž£ľÍłįŽ°ú ŪôėžāįŪēėŽ©ī 5.12žīąžĚīŽč§. žē장ú Ž≥ł Fig. 11 ~ 12žĚĄ žčĚ (9), (10)Í≥ľ ÍįôžĚī ŪĎłŽ¶¨žóź ŪēīžĄĚžĚĄ ŪēėŽ©ī Fig. 13 ~ 14žôÄ ÍįôŽč§.

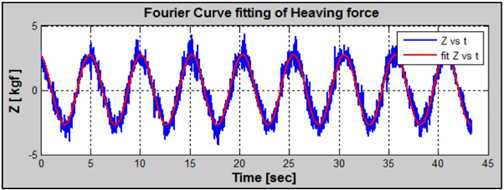
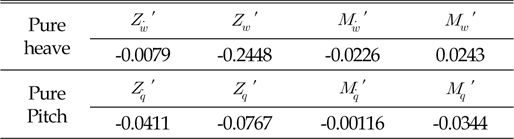
ž†ĀžÉČ žč§žĄ†žĚÄ ŪĎłŽ¶¨žóź Ž∂ĄžĄĚŽźú žĄ†žĚĄ ŽāėŪÉÄŽāīÍ≥† žěąŽč§. žĚīŽ•ľ žĚīžö©Ūēī Fourier sineÍ≥ľ Fourier cosinežĄĪŽ∂ĄžĚĄ žĚīžö©ŪēėÍ≥†, žú†ž≤īŽ†• Í≥ĄžąėŽ•ľ ÍĶ¨ŪēėŽ©ī Table 2žôÄ ÍįôŽč§. žó¨ÍłįžĄú ŪĎúžčúŽźú žúĄž≤®žěź ‚Ä≤(Prime)žĚÄ ÍįĀ Í≥ĄžąėŽď§žĚė Ž¨īžį®žõźžąėŽ•ľ žĚėŽĮłŪēėÍ≥†, Ž¨īžį®žõźŪôĒ Žį©Ž≤ēžĚÄ ŽĮłÍĶ≠ŽĆÄŪēúž°įžĄ†ŪēôŪöĆ(SNAME)žĚė Prime-I systemžĚĄ žĪĄŪÉĚŪēėžó¨ žā¨žö©ŪēėžėÄŽč§.
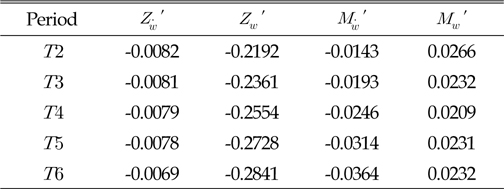
ÍįôžĚÄ Žį©Ž≤ēžúľŽ°ú T2, T3, T4, T5, T6(sec)žóź ŽĆÄŪēīžĄúŽŹĄ ŪēīžĄĚŪēīŽ≥īŽ©ī Table 3Í≥ľ ÍįôŽč§. (T2 < T3 < T4 < T5 < T6) (Heave Žį©ŪĖ•žĚė Ž∂ÄÍįÄžßąŽüČŽ†•)žĚė Í≤Ĺžöį ž£ľÍłįÍįÄ žĽ§žßąžąėŽ°Ě Ž∂ÄÍįÄ žßąŽüČŽ†•žĚī ÍįźžÜĆŪēīžßźžĚĄ Ž≥īžėÄŽč§. ŽįėŽ©īžóź HeaveŽį©ŪĖ•žĚė Íįźžá†Ž†• ‚ÄďZŠļá‚Ä≤ žĚėÍ≤Ĺžöį ž£ľÍłįÍįÄ žĽ§žßąžąėŽ°Ě Í∑ł žėĀŪĖ•Ž†•žĚī ž†źžį® ž¶ĚÍįÄŪē®žĚĄ Ž≥īžėÄŽč§. žĚė Í≤Ĺžöį m‚Ä≤žĚė žēĹ 120%ÍįÄ ŽāėžôĒžúľŽ©į žĚīŽäĒ žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚė Íłī Íľ¨Ž¶¨Žā†Íįúžóź ÍłįžĚłŪēú žėĀŪĖ•žúľŽ°ú žėąžł°ŽźúŽč§.
4.3 Pure pitch test
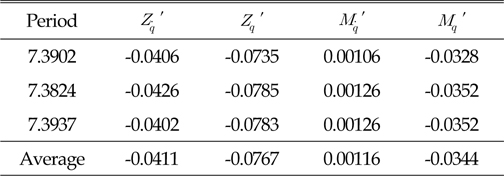
T = T2(s), z0 = A2(m), U= U2(knot), őł0 = 10¬įŽ°ú žīąÍłį ÍįížĚĄ žĄ§ž†ēŪēėžó¨ Pure pitch motionžĚĄ žĄ§ž†ēŪēėžėÄŽč§. Pure heave ŪēīžĄĚ Žį©Ž≤ēÍ≥ľ ŽŹôžĚľŪēėÍ≤Ć ŽćįžĚīŪĄįŽ•ľ ŪēīžĄĚ ŽįŹ ž†ēŽ¶¨ŪēėŽ©ī Table 4žôÄ ÍįôžĚī ž†ēŽ¶¨ŽźúŽč§.
4.4 žöīŽŹô ž†úžĖīžčúŽģ¨Ž†ąžĚīžÖė
žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚÄ žóźŽĄąžßÄ Ūö®žú®žĚĄ Í∑ĻŽĆÄŪôĒ žčúžľú žĶúžÜĆžĚė žóźŽĄąžßÄŽ°ú Íłī ŪÉźžā¨žčúÍįĄÍ≥ľ žě•ÍĪįŽ¶¨žĚė žöīŪē≠žĚī ÍįÄŽä•Ūēú žě†žąė žöīŽŹôž≤īžĚīŽč§. Íłįž°īžĚė ž∂ĒžßĄ žě•žĻėŽ•ľ žĚīžö©ŪēėŽäĒ Ž¨īžĚłžě†žąėž†ēÍ≥ľŽäĒ Žč§Ž•īÍ≤Ć Ž∂ÄŽ†•ž°įž†ą žě•žĻėŽ•ľ žĚīžö©Ūēėžó¨ ž∂ĒžßĄŽ†•žĚĄ žĖĽÍ≤Ć ŽźėÍ≥† žßąŽüČžĚīŽŹô žě•žĻėŽ•ľ žĚīžö©Ūēėžó¨ žěźžĄłž†úžĖīŽ•ľ ŪēėÍ≤Ć ŽźúŽč§. Fig. 15žĚė žĄ†žąėŽ∂ÄŽ∂Ąžóź žěąŽäĒ ŪĒľžä§ŪܧžĚī žēěŽí§Ž°ú žõÄžßĀžĚīŽ©īžĄú Ž∂ÄŽ†•žĚĄ ž°įž†ąŪēėÍ≤Ć ŽźúŽč§.

žē장ú ÍĶ¨Ūēú ŽŹôžú†ž≤īŽ†• Í≥ĄžąėŽď§Í≥ľ REMUS(Remote environmental monitoring unit) AUV(Autonomous underwater vehicle)žĚė Í≥Ąžąė ž∂Ēž†ēžčĚ(Prestero, 2001)žóź ŽĒįŽ•ł žú†ž≤īŽ†• Í≥ĄžąėŽď§žĚĄ žĚīžö©Ūēėžó¨ žčúŽģ¨Ž†ąžĚīžÖėžĚĄ žč§žčúŪēėžėÄŽč§. ŽĻĄžĄ†ŪėēŪē≠žĚĄ Í≥†Ž†§Ūēú žöīŽŹôŽį©ž†ēžčĚžĚÄ Žč§žĚĆžčĚ(31) ~ žčĚ(36)Í≥ľ ÍįôžĚī ž†ēžĚėŪēúŽč§.





žó¨ÍłįžĄú, W, BŽäĒ ŪĒľžä§Ūܧ žöīŽŹôÍ≥ľ žßąŽüČžĚīŽŹôžě•žĻėžĚė žõÄžßĀžěĄžóź ŽĒįŽ•ł Ž≥ÄŪôĒŽ•ľ Í≥†Ž†§Ūēú ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚė žīĚ Ž¨īÍ≤ĆžôÄ, Ž∂ÄŽ†•žĚĄ, xG‚Ä≤ , xB žĚÄ xŽį©ŪĖ•žĚė Ž¨īÍ≤Ćž§Ďžč¨Í≥ľ Ž∂ÄŽ†•ž§Ďžč¨ žĘĆŪĎúŽ•ľ ÍįĀÍįĀ ŽāėŪÉÄŽāłŽč§. žčúŽģ¨Ž†ąžĚīžÖėžĚĄ žúĄŪēī MatLab ŪĒĄŽ°úÍ∑łŽě®žĚĄ žĚīžö©Ūēėžó¨ PD(Proportionalderivative) ž†úžĖīŽ•ľ ŪēėžėÄŽč§. žčúŽģ¨Ž†ąžĚīžÖė žčúÍįĄžĚÄ 120žīą žĚīÍ≥†, žÉėŪĒĆŽßĀžĚÄ 0.01žīąŽ°ú žĄ§ž†ē ŪēėžėÄŽč§. žīąÍłį ž°įÍĪīžĚÄ žąėžč¨ 0m žóźžĄú žčúžěĎŪēėžėÄÍ≥†, žĚĆžĄĪŽ∂ÄŽ†• 1NžĚĄ Ž∂ÄÍįÄŪēėžėÄŽč§. žÜ掏Ą, ŪĒľžĻė ÍįĀŽ≥ÄžúĄ Ž™®ŽĎź 0žóźžĄú žčúžěĎŪēúŽč§. Ž™©ŪĎú ž°įÍĪīžĚÄ žąėžč¨ 100m ÍĻĆžßÄ ŪēėÍįēžĚĄ Ūēú ŪõĄ, 100mžóźžĄú žěźžĄłŽ•ľ žú†žßÄŪēėŽŹĄŽ°Ě žĄ§ž†ēŪēėžėÄŽč§.
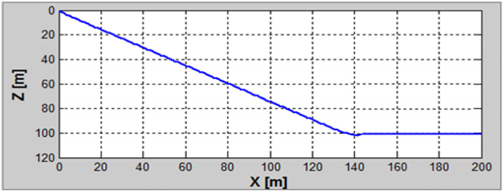
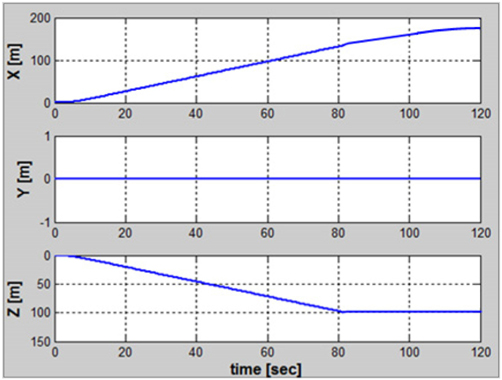
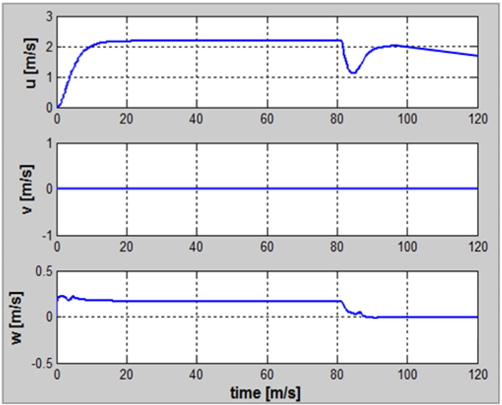
Fig. 16žĚĄ Ž≥īŽ©ī Ž™©ž†Āžóź ŽßěÍ≤Ć žąėžč¨ 100mÍĻĆžßÄ ŪēėÍįēžĚĄ Ūēú ŪõĄ, žąėžč¨ 100mžóźžĄú žąėžč¨žĚĄ žěė žú†žßÄŪēėÍ≥† žěąŽäĒ Í≤ɞ̥ ŪôēžĚł Ūē† žąė žěąŽč§. Í∑łŽ¶¨Í≥† Fig. 18žĚė xŽį©ŪĖ•žóź ŽĆÄŪēú žÜ掏ĄŽ≥ÄŪôĒŽ•ľ žāīŪéīŽ≥īŽ©ī, žīąÍłį Pitch ÍįĀ ‚Äď30¬įžóźžĄú 0¬įŽ°ú Ž≥ÄŪôĒŪēėŽ©īžĄú žąėžč¨ 100mžßÄž†źžĚł 80žīą ŪõĄ OvershootÍĶ¨ÍįĄžĚī ŽįúžÉĚŪēėžó¨ žąúÍįĄ žÜ掏ĄÍįÄ ÍłČÍ≤©Ūěą ŽĖ®žĖīžßÄÍ≤Ć ŽźėŽ©į, Žč§žčú Pitch ÍįĀ 0¬įŽ•ľ žú†žßÄŪēėŽ©īžĄú žąúÍįĄžÜ掏ĄÍįÄ žě†žčú ž¶ĚÍįÄŪēú ŪõĄ ž†źžį® ÍįźžÜĆŪēėŽäĒ ŪėĄžÉĀžĚĄ Ž≥ľ žąėÍįÄ žěąŽč§. ŽėźŪēú ŪĒľžä§ŪܧÍ≥ľ žßąŽüČžĚīŽŹôžě•žĻėÍįÄ žąėž§Ď ͳĎ̾žĚīŽćĒ žúĄžĻėžôÄ žěźžĄłžóź ŽĒįŽĚľ žēĆŽßěÍ≤Ć Ž≥ÄŪôĒŪē®žĚĄ Fig. 19, Fig. 20žóźžĄú ŪôēžĚłŪē† žąė žěąŽč§. Í∑łŽ¶¨Í≥† žĶúžĘÖž†ĀžúľŽ°ú žčúŽģ¨Ž†ąžĚīžÖėžóź žā¨žö©Žźú žĄ†Ūėē žú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽ•ľ Table 5žôÄ ÍįôžĚī ž†ēŽ¶¨Ūē† žąė žěąŽč§.


5. Í≤į Ž°†
Ž≥ł ŽÖľŽ¨łžóźžĄúŽäĒ VPMM žčúŪóėžĚĄ ŪÜĶŪēī žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚė Heave-Pitchžóź ÍīÄŽ†®Žźú Ž∂ÄÍįÄ žßąŽüČŽ†•, Ž∂ÄÍįÄÍīÄžĄĪ Ž™®Ž©ėŪäł, Íįźžá†Ž†• ŽįŹ Íįźžá† Ž™®Ž©ėŪ䳎•ľ Í≥Ąžł°ŪēėžėÄžúľŽ©į, žĚī Í≥Ąžł° Í≤įÍ≥ľŽ°úŽ∂ÄŪĄį Table 5žôÄ ÍįôžĚī žąėž§Ď ͳĎ̾žĚīŽćĒžĚė ŽŹôžú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽ•ľ žĖĽžóąŽč§.
Ž≥ł VPMM žčúŪóėžĚĄ ŪÜĶŪēī ÍĶ¨Ūēú žĄ†Ūėē žú†ž≤īŽ†• ŽĮłÍ≥Ąžąė( )žôÄ REMUS AUVžĚė Í≥Ąžąė ž∂Ēž†ēžč̞̥ žĚīžö©Ūēėžó¨ žôĄžĄĪŽźú 6 žěźžú†ŽŹĄ žöīŽŹôŽį©ž†ēžč̞̥ žĚīžö©Ūēėžó¨ žčúŽģ¨Ž†ąžĚīžÖėžĚĄ žč§žčúŪēėžėÄÍ≥†, žĄ§Í≥ĄŽźú žč¨ŽŹĄžóźžĄúžĚė ž†úžĖīÍįÄ žěė žąėŪĖČŽźėŽäĒ Í≤ɞ̥ ŪôēžĚłŪē† žąė žěąžóąŽč§. ŪēúŪéł, Ž∂ÄÍįÄžßąŽüČŽ†• Í≥ĄžąėžĚė Í≤Ĺžöį, ž£ľÍłįÍįÄ žĽ§žßąžąėŽ°Ě Í≥ĄžąėÍįížĚī ÍįźžÜĆŪēī žßźžĚĄ Ž≥īžĚīŽäĒ ŽįėŽ©īžóź HeaveŽį©ŪĖ•žĚė Íįźžá†Ž†• Í≥ĄžąėžĚė Í≤Ĺžöį, ž£ľÍłįÍįÄ žĽ§žßąžąėŽ°Ě ž†źžį® ž¶ĚÍįÄŪē®žĚĄ Ž≥īžėÄŽč§. Í∑łŽ¶¨Í≥† Ž∂ÄÍįÄžßąŽüČŽ†•žĚī Ž™®Ūėē žßąŽüČžĚė žēĹ 120%Ž°ú ŽāėŪÉÄŽā¨žúľŽ©į žĚīŽäĒ žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚė Íłī Íľ¨Ž¶¨Žā†Íįúžóź ÍłįžĚłŪēú žėĀŪĖ•žúľŽ°ú ŪĆźŽč®ŽźúŽč§. ŪĖ•ŪõĄ žöīŽŹôžĄĪŽä•žĚė ŪĖ•žÉĀžĚĄ žúĄŪēī Íľ¨Ž¶¨Žā†ÍįúžĚė žúĄžĻė, ŪėēžÉĀ, ŪĀ¨Íłį Ž≥ÄŪôĒ ŽďĪžĚĄ žč§žčúŪēėžó¨ Í∑ł Ž≥ÄŪôĒžôÄ ŽŹôžú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽď§Í≥ľžĚė žÉĀŪėł žóįÍīÄžĄĪ ŽįŹ žöīŽŹôžĄĪŽä•žĚė Ž≥ÄŪôĒ ŽďĪžĚĄ žóįÍĶ¨Ūē† žėąž†ēžĚīŽč§.
)žôÄ REMUS AUVžĚė Í≥Ąžąė ž∂Ēž†ēžč̞̥ žĚīžö©Ūēėžó¨ žôĄžĄĪŽźú 6 žěźžú†ŽŹĄ žöīŽŹôŽį©ž†ēžč̞̥ žĚīžö©Ūēėžó¨ žčúŽģ¨Ž†ąžĚīžÖėžĚĄ žč§žčúŪēėžėÄÍ≥†, žĄ§Í≥ĄŽźú žč¨ŽŹĄžóźžĄúžĚė ž†úžĖīÍįÄ žěė žąėŪĖČŽźėŽäĒ Í≤ɞ̥ ŪôēžĚłŪē† žąė žěąžóąŽč§. ŪēúŪéł, Ž∂ÄÍįÄžßąŽüČŽ†• Í≥ĄžąėžĚė Í≤Ĺžöį, ž£ľÍłįÍįÄ žĽ§žßąžąėŽ°Ě Í≥ĄžąėÍįížĚī ÍįźžÜĆŪēī žßźžĚĄ Ž≥īžĚīŽäĒ ŽįėŽ©īžóź HeaveŽį©ŪĖ•žĚė Íįźžá†Ž†• Í≥ĄžąėžĚė Í≤Ĺžöį, ž£ľÍłįÍįÄ žĽ§žßąžąėŽ°Ě ž†źžį® ž¶ĚÍįÄŪē®žĚĄ Ž≥īžėÄŽč§. Í∑łŽ¶¨Í≥† Ž∂ÄÍįÄžßąŽüČŽ†•žĚī Ž™®Ūėē žßąŽüČžĚė žēĹ 120%Ž°ú ŽāėŪÉÄŽā¨žúľŽ©į žĚīŽäĒ žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚė Íłī Íľ¨Ž¶¨Žā†Íįúžóź ÍłįžĚłŪēú žėĀŪĖ•žúľŽ°ú ŪĆźŽč®ŽźúŽč§. ŪĖ•ŪõĄ žöīŽŹôžĄĪŽä•žĚė ŪĖ•žÉĀžĚĄ žúĄŪēī Íľ¨Ž¶¨Žā†ÍįúžĚė žúĄžĻė, ŪėēžÉĀ, ŪĀ¨Íłį Ž≥ÄŪôĒ ŽďĪžĚĄ žč§žčúŪēėžó¨ Í∑ł Ž≥ÄŪôĒžôÄ ŽŹôžú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽď§Í≥ľžĚė žÉĀŪėł žóįÍīÄžĄĪ ŽįŹ žöīŽŹôžĄĪŽä•žĚė Ž≥ÄŪôĒ ŽďĪžĚĄ žóįÍĶ¨Ūē† žėąž†ēžĚīŽč§.
)žôÄ REMUS AUVžĚė Í≥Ąžąė ž∂Ēž†ēžč̞̥ žĚīžö©Ūēėžó¨ žôĄžĄĪŽźú 6 žěźžú†ŽŹĄ žöīŽŹôŽį©ž†ēžč̞̥ žĚīžö©Ūēėžó¨ žčúŽģ¨Ž†ąžĚīžÖėžĚĄ žč§žčúŪēėžėÄÍ≥†, žĄ§Í≥ĄŽźú žč¨ŽŹĄžóźžĄúžĚė ž†úžĖīÍįÄ žěė žąėŪĖČŽźėŽäĒ Í≤ɞ̥ ŪôēžĚłŪē† žąė žěąžóąŽč§. ŪēúŪéł, Ž∂ÄÍįÄžßąŽüČŽ†• Í≥ĄžąėžĚė Í≤Ĺžöį, ž£ľÍłįÍįÄ žĽ§žßąžąėŽ°Ě Í≥ĄžąėÍįížĚī ÍįźžÜĆŪēī žßźžĚĄ Ž≥īžĚīŽäĒ ŽįėŽ©īžóź HeaveŽį©ŪĖ•žĚė Íįźžá†Ž†• Í≥ĄžąėžĚė Í≤Ĺžöį, ž£ľÍłįÍįÄ žĽ§žßąžąėŽ°Ě ž†źžį® ž¶ĚÍįÄŪē®žĚĄ Ž≥īžėÄŽč§. Í∑łŽ¶¨Í≥† Ž∂ÄÍįÄžßąŽüČŽ†•žĚī Ž™®Ūėē žßąŽüČžĚė žēĹ 120%Ž°ú ŽāėŪÉÄŽā¨žúľŽ©į žĚīŽäĒ žąėž§Ď ͳĎ̾žĚīŽćĒ Ž™®ŪėēžĚė Íłī Íľ¨Ž¶¨Žā†Íįúžóź ÍłįžĚłŪēú žėĀŪĖ•žúľŽ°ú ŪĆźŽč®ŽźúŽč§. ŪĖ•ŪõĄ žöīŽŹôžĄĪŽä•žĚė ŪĖ•žÉĀžĚĄ žúĄŪēī Íľ¨Ž¶¨Žā†ÍįúžĚė žúĄžĻė, ŪėēžÉĀ, ŪĀ¨Íłį Ž≥ÄŪôĒ ŽďĪžĚĄ žč§žčúŪēėžó¨ Í∑ł Ž≥ÄŪôĒžôÄ ŽŹôžú†ž≤īŽ†• ŽĮłÍ≥ĄžąėŽď§Í≥ľžĚė žÉĀŪėł žóįÍīÄžĄĪ ŽįŹ žöīŽŹôžĄĪŽä•žĚė Ž≥ÄŪôĒ ŽďĪžĚĄ žóįÍĶ¨Ūē† žėąž†ēžĚīŽč§.



