


1. м„ң лЎ
н•ҙм Җн”ҢлһңнҠё л°Ҹ н•ҙм–‘мҳҒнҶ нҷ•лҢҖмҷҖ л¬ҙн•ңн•ң мһҗмӣҗмқҳ ліҙкі мқё н•ҙм–‘мқ„ к°ңл°ңн•ҳкё° мң„н•ң мҲҳмӨ‘кұҙм„Ө мӢңмһҘмқҳ мҰқк°ҖлЎң мқён•ҙ н•ҙм–‘мқҳ м—ҙм•…н•ң мһ…м§ҖмЎ°кұҙм—җлҸ„ л¶Ҳкө¬н•ҳкі лҚ”мҡұ лӢӨм–‘н•ң нҳ•нғңмқҳ н•ҙм Җмһ‘м—…мқҙ н•„мҡ”н•ҳкІҢ лҗҳм—ҲлӢӨ. мқҙ л•Ң мҲҳмӨ‘м—җм„ңмқҳ кө¬мЎ°л¬јмқ„ нҡЁмңЁм ҒмңјлЎң кұҙм„Өн• мҲҳ мһҲлҠ” мһҘ비мқё мҲҳмӨ‘кұҙм„Өмҡ© лЎңлҙҮмқ„ н•„мҡ”лЎң н•ңлӢӨ. нҠ№нһҲ лӢӨм–‘н•ң н•ҙм–‘н”ҢлһңнҠё л°Ҹ н•ҙм–‘кө¬мЎ°л¬јмқ„ мһҮлҠ” н•ҙм Җ кҙ‘нҶөмӢ мјҖмқҙлё”, м „л Ҙ мјҖмқҙлё” л°Ҹ нҢҢмқҙн”„лқјмқёмқ„ н•ҙм Җм—җ л§Өм„Өн•ҳлҠ” мһ‘м—…мқҳ кІҪмҡ° мЈјлЎң м җм°©м„ұмқҙ к°•н•ҳкұ°лӮҳ лӢЁлӢЁн•ң н•ҙм Җм§Җл°ҳм—җм„ң мқҙлЈЁм–ҙ진лӢӨ. мқҙ л•Ң Trenching cutter, Water jetл“ұмқ„ мқҙмҡ©н•ң л§Өм„Өмһ‘м—… мӢң л°ңмғқн•ҳлҠ” л°ҳл Ҙмқ„ кІ¬л””кё° мң„н•ң кІ¬мқёл Ҙкіј кё°лҸҷм„ұлҠҘмқ„ м–»лҠ”лҚ° мһҲм–ҙ нҠёлһҷл°©мӢқмқҳ к¶ӨлҸ„м°Ёлҹүмқҙ нҒ° мһҘм җмқ„ к°Җм§Җкі мһҲлӢӨ.
мқҙлҹ¬н•ң к¶ӨлҸ„м°Ёлҹүмқҳ лҸҷм Ғкұ°лҸҷмқ„ н•ҙм„қн•ҳкё° мң„н•ҙ мҡҙлҸҷ лӘЁлҚёл§Ғкіј мҲҳм№ҳ мӢң뮬л Ҳмқҙм…ҳ лҢҖн•ң м—°кө¬к°Җ л§Һмқҙ 진н–үлҗҳм–ҙ мҷ”лӢӨ(Baladi and Rohani, 1979; Kim et al., 2004; Le et al., 1997; Murakami et al., 1992; Wong, 1993). нҠ№нһҲ, Kim et al.(2004)лҠ” к¶ӨлҸ„м°Ёлҹүмқҳ лҸҷм Ғкұ°лҸҷ н•ҙм„қм—җ мһҲм–ҙ Murakami et al.(1992)м—җ мқҳн•ҙ м ңм•Ҳлҗң к°•мІҙм°Ёлҹү лӘЁлҚёкіј лӢӨл¬јмІҙ лҸҷм—ӯн•ҷ н•ҙм„қ н”„лЎңк·ёлһЁмқ„ мқҙмҡ©н•ҳм—¬ лӘЁлҚёл§Ғлҗң лӢӨл¬јмІҙ м°Ёлҹү лӘЁлҚёмқҳ лҸҷм—ӯн•ҷ н•ҙм„қкІ°кіјл“Өмқ„ 비көҗн•ҳлҠ” м—°кө¬лҘј мҲҳн–үн•ҳмҳҖлӢӨ.
ліё л…јл¬ём—җм„ңлҠ” Baladi and Rohani(1979), Wong(1993) к·ёлҰ¬кі Malcolm(1978)мқҳ м—°кө¬кІ°кіјлҘј л°”нғ•мңјлЎң мҲҳмӨ‘кұҙм„Өмҡ© нҠёлһҷкё°л°ҳ мһ‘м—…мҡ© лЎңлҙҮмқҳ м°ЁмІҙмқё к¶ӨлҸ„м°Ёлҹүмқҳ мҡҙлҸҷ лӘЁлҚёл§Ғкіј мһ‘м—…мҡ© нҲҙмқё Trenching cutterмқҳ лӘЁлҚёл§Ғмқ„ мҲҳн–үн•ҳкі , мӢң뮬л Ҳмқҙм…ҳмқ„ нҶөн•ң мўҢ, мҡ° к¶ӨлҸ„мқҳ мҶҚлҸ„м—җ л”°лҘё м§Ғ진 л°Ҹ м„ нҡҢмҡҙлҸҷ, к·ёлҰ¬кі Trenching мһ‘м—… мӢң к¶ӨлҸ„м°Ёлҹүмқҳ н•„мҡ” кІ¬мқёл Ҙмқ„ н•ҙм„қн•ҳкі мһҗ н•ңлӢӨ.
2. мҡҙлҸҷ лӘЁлҚёл§Ғ
2.1 к¶ӨлҸ„м°Ёлҹү лӘЁлҚё
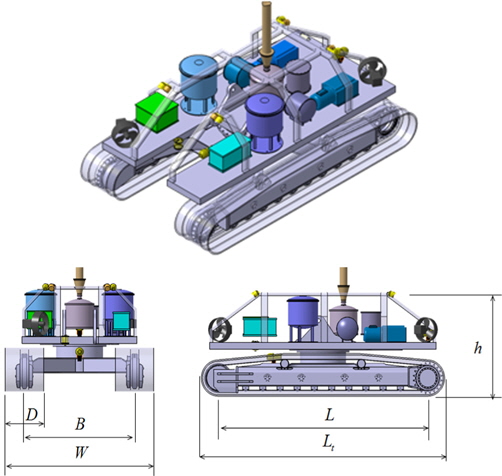
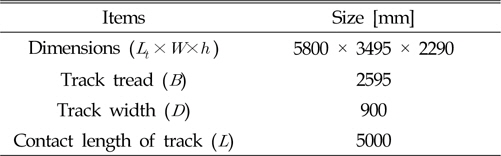
ліё л…јл¬ёмқҳ к¶ӨлҸ„м°Ёлҹү лӘЁлҚёмқҖ мҲҳмӨ‘кұҙм„ӨлЎңлҙҮмӮ¬м—…лӢЁ(нӣ„кё° м°ёкі )м—җм„ң к°ңл°ң мӨ‘мқё нҠёлһҷкё°л°ҳ н•ҙм Җ мӨ‘мһ‘м—…мҡ© лЎңлҙҮмқҙл©° мҷёнҳ•мқҖ Fig. 1мқҳ к°ңл…җм„Өкі„лҸ„мҷҖ к°ҷмңјл©°, н•ҳл¶ҖлҠ” мўҢ, мҡ° к¶ӨлҸ„к°Җ мһҲмңјл©° мғҒл¶Җн”„л Ҳмһ„м—җлҠ” лӮҙм••мҡ©кё°, мјҖмқҙлё” м—°кІ°л¶Җ, мҲҳмӨ‘ 추진기 к·ёлҰ¬кі мһ‘м—…мҡ© нҲҙ лёҢлһҳнӮ·мңјлЎң кө¬м„ұлҗҳм–ҙ мһҲлӢӨ. лҳҗн•ң мЈјмҡ”л¶Җмқҳ м№ҳмҲҳмҷҖ кё°нҳёлҠ” Table 1кіј Fig. 1м—җ лӮҳнғҖлӮё л°”мҷҖ к°ҷлӢӨ(Lee et al., 2015).
2.2 мҡҙлҸҷл°©м •мӢқ
Fig. 2лҠ” к¶ӨлҸ„м°Ёлҹүмқҳ м°Ёлҹүкі м •мўҢн‘ңкі„мҷҖ к°Ғк°Ғмқҳ к¶ӨлҸ„мҡ”мҶҢл“Өкіј м§Җл©ҙмӮ¬мқҙм—җ мһ‘мҡ©н•ҳлҠ” м§Ғ진방н–Ҙ, нҡЎл°©н–Ҙ к·ёлҰ¬кі мҲҳм§Ғл°©н–Ҙмқҳ нһҳл“Өмқ„ лӮҳнғҖлӮҙм—Ҳкі , м°Ёлҹүкі м •мўҢн‘ңкі„мқҳ мӣҗм җмқҖ м°Ёлҹүмқҳ кё°н•ҳн•ҷм Ғ мӨ‘мӢ¬м—җ мң„м№ҳн•ҳлҸ„лЎқ н•ҳкі , м°Ёлҹүмқҳ 진н–үл°©н–Ҙмқ„ x축 к·ёлҰ¬кі z축мқ„ м—°м§Ғ мң„ л°©н–ҘмңјлЎң н•ҳмҳҖмңјл©°, y축мқҖ мҳӨлҘёмҶҗлІ•м№ҷм—җ мқҳн•ҳм—¬ кІ°м •н•ҳмҳҖлӢӨ(Lee et al., 2015). мқҙл•Ң к°Ғк°Ғмқҳ Surge, Sway, Yawл°©н–Ҙмқҳ 3 мһҗмң лҸ„ мҡҙлҸҷл°©м •мӢқмқҖ мӢқ (1)кіј к°ҷлӢӨ.
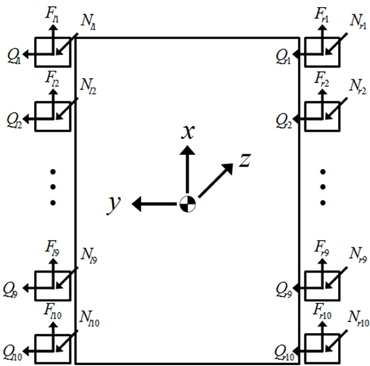

м—¬кё°м„ң M, IzлҠ” м§Ҳлҹүкіј м§ҲлҹүкҙҖм„ұлӘЁл©ҳнҠёлҘј vx, vy, rлҠ” м°Ёлҹү мӨ‘мӢ¬м—җм„ңмқҳ м§Ғ진방н–Ҙкіј нҡЎл°©н–Ҙ к·ёлҰ¬кі Yawл°©н–Ҙмқҳ к°ҒмҶҚлҸ„мқҙлӢӨ. лҳҗн•ң FмҷҖ QлҠ” к°Ғ к¶ӨлҸ„мҡ”мҶҢм—җ мһ‘мҡ©н•ҳлҠ” м§Ғ진과 нҡЎл°©н–Ҙмқҳ м „лӢЁл Ҙ(Shear force)мқҙл©°, ПғлҠ” мҡҙлҸҷм Җн•ӯкі„мҲҳ, к·ёлҰ¬кі HtлҠ” Trencherмқҳ мҲҳнҸүл°ҳл ҘмқҙлӢӨ. NмқҖ к°Ғ к¶ӨлҸ„мҡ”мҶҢ м•„лһҳм—җм„ңмқҳ мҲҳм§Ғн•ҳмӨ‘мқҙл©° к¶ӨлҸ„м°Ёлҹүмқҳ кё°кө¬н•ҷм Ғ кҙҖкі„мӢқм—җ мқҳн•ҙ кө¬н• мҲҳ мһҲмңјл©° м•„лһҳ мӢқ (2)мҷҖ к°ҷмқҙ н‘ңнҳ„лҗ мҲҳ мһҲлӢӨ(Baladi and Rohani, 1979).

м—¬кё°м„ң FcxмҷҖ FcyлҠ” x, yл°©н–Ҙмқҳ кҙҖм„ұл Ҙ, HлҠ” л¬ҙкІҢмӨ‘мӢ¬мқҳ лҶ’мқҙ, xiлҠ” л¬ҙкІҢмӨ‘мӢ¬кіј к°Ғ к¶ӨлҸ„мҡ”мҶҢмӮ¬мқҙмқҳ кұ°лҰ¬, bлҠ” л¶Җл Ҙ, к·ёлҰ¬кі VtлҠ” Trencherмқҳ мҲҳм§Ғл°ҳл ҘмқҙлӢӨ.
2.3 нҶ м–‘лӘЁлҚё
Wong(1993)мқҖ к¶ӨлҸ„м°Ёлҹүмқҳ м§Ғ진, нҡЎл°©н–Ҙмқҳ м „лӢЁл Ҙмқ„ м•„лһҳ мӢқ(3)кіј к°ҷмқҙ к¶ӨлҸ„ мҠ¬лҰҪкіј м§Җл©ҙмқҳ нҠ№м„ұ к·ёлҰ¬кі мҲҳм§Ғмқ‘л Ҙмқҳ н•ЁмҲҳлЎң м ңм•Ҳн•ҳмҳҖлӢӨ.
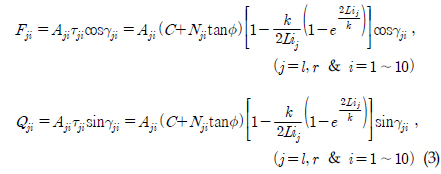
м—¬кё°м„ң CлҠ” м§Җл©ҙмқҳ м җм°©лҸ„(Cohesion), П•лҠ” л§Ҳм°°к°Ғ(Angle of internal friction), kлҠ” м „лӢЁліҖнҳ•кі„мҲҳ(Shear deformation modulus), ОілҠ” к¶ӨлҸ„мҠ¬лҰҪк°ҒмңјлЎң мқҙлҠ” м°Ёлҹүмқҳ лҸҷм Ғкұ°лҸҷ ліҖмҲҳл“ӨлЎңл¶Җн„° кі„мӮ°мқҙ к°ҖлҠҘн•ҳлӢӨ. лҳҗн•ң ijлҠ” к¶ӨлҸ„ мҠ¬лҰҪ(Track slip)мқҙл©° мӢқ (4)мҷҖ к°ҷмқҙ м°Ёлҹүкіј к¶ӨлҸ„мқҳ мҶҚл Ҙмқҳ мқҳн•ҙ м •мқҳлҗңлӢӨ(Yeu et al., 2007).

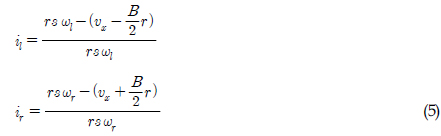
мўҢ, мҡ° нҠёлһҷмқҳ мҠӨн”„лқјмј“(Sprocket) к°ҒмҶҚлҸ„лҘј Пүl, Пүrмқҙлқј н•ҳкі , rsлҠ” нҠёлһҷ мҠӨн”„лқјмј“мқҳ л°ҳм§ҖлҰ„мқҙлқј н•ҳл©ҙ мўҢ, мҡ° к¶ӨлҸ„ мҠ¬лҰҪ il, irмқҖ лӢӨмқҢкіј к°ҷлӢӨ.
2.4 Trencher лӘЁлҚё
к¶ӨлҸ„м°Ёлҹүм—җ л¶Җм°©лҗҳм–ҙ н•ҙм ҖмјҖмқҙлё” л§Өм„Өмқ„ мң„н•ҙ н•ҙм Җ л°”лӢҘмқ„ нҢҢлӮҙлҠ”лҚ° мӮ¬мҡ©н•ҳлҠ” мһ‘м—…мҡ© нҲҙмқ„ Trenching cutter лҳҗлҠ” Trencherлқјкі н•ҳл©°, Fig. 3мқҖ Trenching мһ‘м—… мӢң Cutter barмҷҖ нҶ м–‘мӮ¬мқҙм—җм„ң л°ңмғқн•ҳлҠ” нһҳл“Өмқ„ лӮҳнғҖлӮҙкі мһҲмңјл©°, мқҙл•Ң Trencher лӘЁлҚём—җм„ң мӮ¬мҡ©лҗң ліҖмҲҳл“ӨмқҖ Table 2мҷҖ к°ҷлӢӨ.
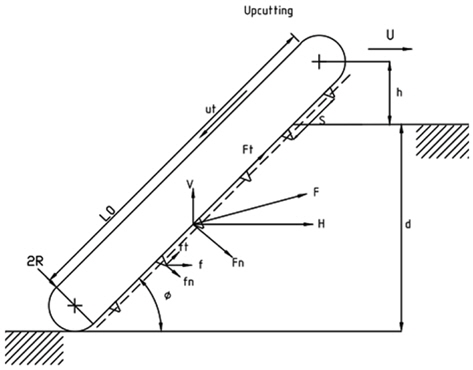
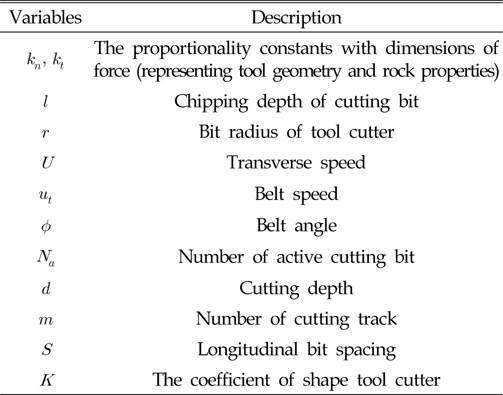
Fig. 3 мңјлЎңл¶Җн„° Trencherмқҳ к°Ғк°Ғмқҳ BitмҷҖ нҶ м–‘кіјмқҳ кІҪкі„л©ҙм—җм„ңмқҳ л°ңмғқн•ҳлҠ” мҲҳм§Ғ, мҲҳнҸүл°©н–Ҙмқҳ нһҳмқҖ мӢқ (6)кіј к°ҷмқҙ лӮҳнғҖ лӮј мҲҳ мһҲлӢӨ.

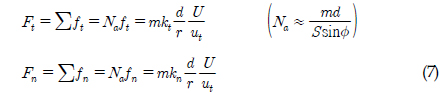
мқҙл•Ң к°Ғк°Ғмқҳ Tipм—җм„ң л°ңмғқн•ҳлҠ” нһҳмқҳ н•©л Ҙмқ„ кө¬н•ҳл©ҙ м•„лһҳ мӢқ(7)м—җ мқҳн•ҙ нҲҙкіј нҶ м–‘мқҳ кІҪкі„л©ҙм—җм„ңмқҳ мҲҳнҸү, мҲҳм§Ғл°©н–Ҙмқҳ нһҳмқ„ кө¬н• мҲҳ мһҲлӢӨ(Malcolm, 1978).
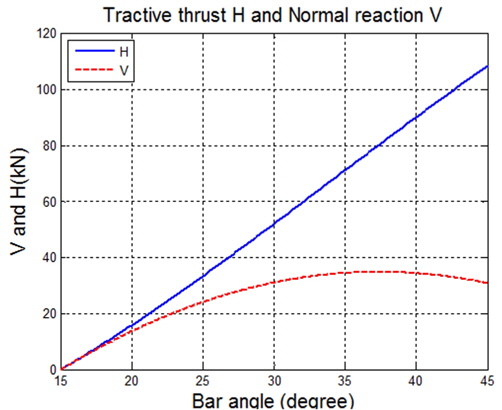
лҳҗн•ң, к¶ӨлҸ„м°Ёлҹүмқҳ м°Ёлҹүкі м •мўҢн‘ңкі„мқҳ X축, Z축м—җ нһҳмқҳ м„ұ분мңјлЎң лҢҖмһ…н•ҳкё° мң„н•ҙ мўҢн‘ңліҖнҷҳмқ„ н•ҳл©ҙ м•„лһҳ мӢқ (8)кіј к°ҷмқҙ Trenching мһ‘м—… мӢң л°ңмғқн•ҳлҠ” м „мІҙмқҳ мҲҳнҸүл°©н–Ҙ, мҲҳм§Ғл°©н–Ҙмқҳ л°ҳл Ҙмқ„ кө¬н• мҲҳ мһҲкі нҲҙ к°ҒлҸ„м—җ л”°лҘё нһҳл“ӨмқҖ Fig. 4мқҳ к·ёлһҳн”„мҷҖ к°ҷлӢӨ.

3. мҡҙлҸҷм„ұлҠҘ н•ҙм„қ
лӘЁлҚёл§Ғлҗң к¶ӨлҸ„м°Ёлҹүмқҳ мҡҙлҸҷл°©м •мӢқкіј Trencher лӘЁлҚёмқҳ мҲҳм№ҳ мӢң뮬л Ҳмқҙм…ҳмқ„ мҲҳн–үн•ҳм—¬ лҸҷм Ғкұ°лҸҷмқ„ нҷ•мқён•ҳмҳҖлӢӨ. мқҙл•Ң мӮ¬мҡ©лҗң мӢң뮬л Ҳмқҙм…ҳ н”„лЎңк·ёлһЁмқҖ Matlab/SimulinkлҘј мқҙмҡ©н•ҳмҳҖлӢӨ. мҲҳм№ҳ мӢң뮬л Ҳмқҙм…ҳм—җ мӮ¬мҡ©лҗң мһ…л ҘмқҖ мўҢ, мҡ° к¶ӨлҸ„мқҳ мҠӨн”„лқјмј“ нҡҢм „мҶҚлҸ„мқҙл©° л…ёл©ҙмқҖ кІҪмӮ¬к°Җ м—Ҷмңјл©° мһҘм• л¬ј л°Ҹ көҙкіЎмқҙ м—ҶлҠ” нҸүнғ„н•ң м§Җнҳ• к·ёлҰ¬кі нҶ м–‘мқҳ мһ¬м§ҲмқҖ Dense sandлЎң к°Җм •н•ҳмҳҖлӢӨ.
3.1 м§Ғ진주н–ү
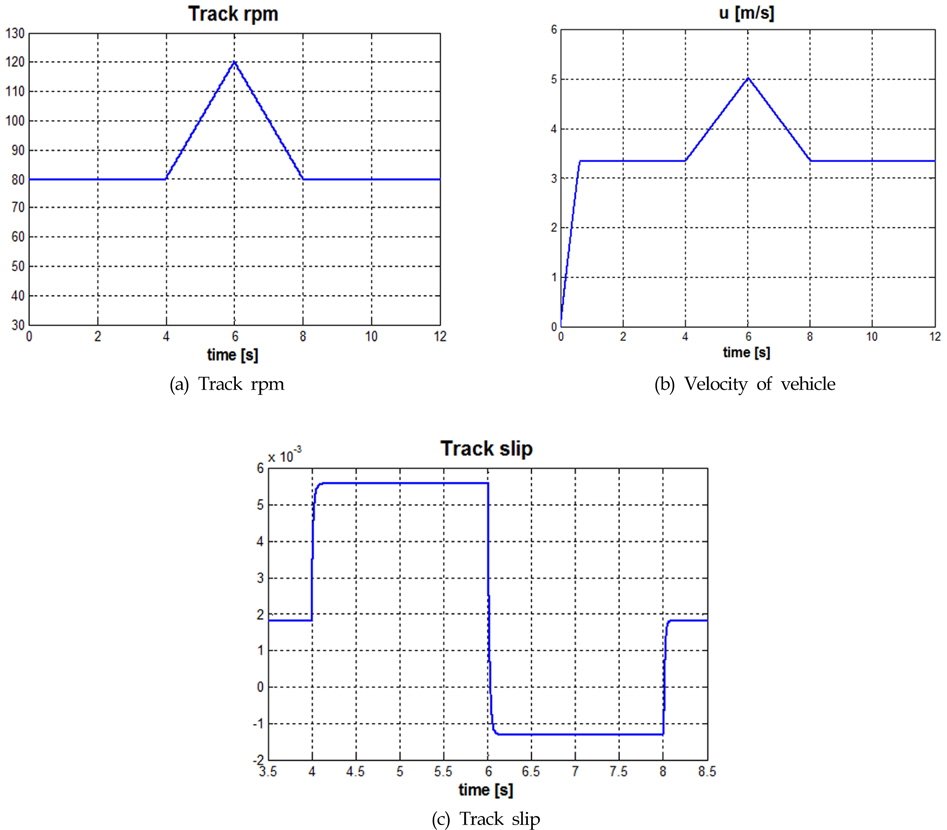
м§Ғ진주н–ү мӢң뮬л Ҳмқҙм…ҳмқҳ кІҪмҡ° м–‘мӘҪ к¶ӨлҸ„мқҳ мһ…л ҘмқҖ Fig. 5 (a)м—җм„ңмІҳлҹј мҙҲкё° 80rpmмңјлЎң мӢңмһ‘н•ҳм—¬ 4~8мҙҲ кө¬к°„м—җм„ңлҠ” 120rpmмңјлЎң мҰқк°Җ нӣ„ лӢӨмӢң 80rpmмңјлЎң к°җмҶҢмӢңмј°лӢӨ. мқҙл•Ң Fig. 5 (b)мҷҖ к°ҷмқҙ мҙҲкё° м°Ёлҹүмқҳ мҶҚлҸ„к°Җ 0m/sмңјлЎң мӢңмһ‘н•ҳм—¬ м•Ҫ 0.6мҙҲм—җ 3.3m/sлЎң л“ұмҶҚмҡҙлҸҷмқ„ н•ҳлӢӨ к¶ӨлҸ„мқҳ мһ…л Ҙмқҙ ліҖн•ҳлҠ” кө¬к°„(6мҙҲ~8мҙҲ)м—җм„ң к°ҖмҶҚ л°Ҹ к°җмҶҚмҡҙлҸҷмқ„ н•ҳлҠ” кІғмқ„ ліј мҲҳ мһҲлӢӨ. лҳҗн•ң, Fig. 5 (c)мқҳ к·ёлһҳн”„м—җм„ң мӢңк°„м—җ л”°лҘё к¶ӨлҸ„ мҠ¬лҰҪмқҳ ліҖнҷ”лҘј ліҙл©ҙ к¶ӨлҸ„мһ…л Ҙм—җ л”°лқј мӢқ (4)мҷҖ мӢқ (5)м—җ мқҳн•ҙ к°ҖмҶҚкө¬к°„(4мҙҲ~6мҙҲ)м—җм„ңлҠ” к¶ӨлҸ„м°Ёлҹүмқҳ мҶҚлҸ„м—җ 비н•ҙ к¶ӨлҸ„к°Җ л№ лҘҙкІҢ нҡҢм „н•ҳлҜҖлЎң мҠ¬лҰҪмқҙ мҰқк°Җн•ҳкі к°җмҶҚкө¬к°„(6мҙҲ~8мҙҲ)м—җм„ңлҠ” л°ҳлҢҖмқҳ нҳ„мғҒмқҙ мқјм–ҙлӮЁмқ„ м•Ң мҲҳ мһҲлӢӨ.
3.2 м„ нҡҢмҡҙлҸҷ
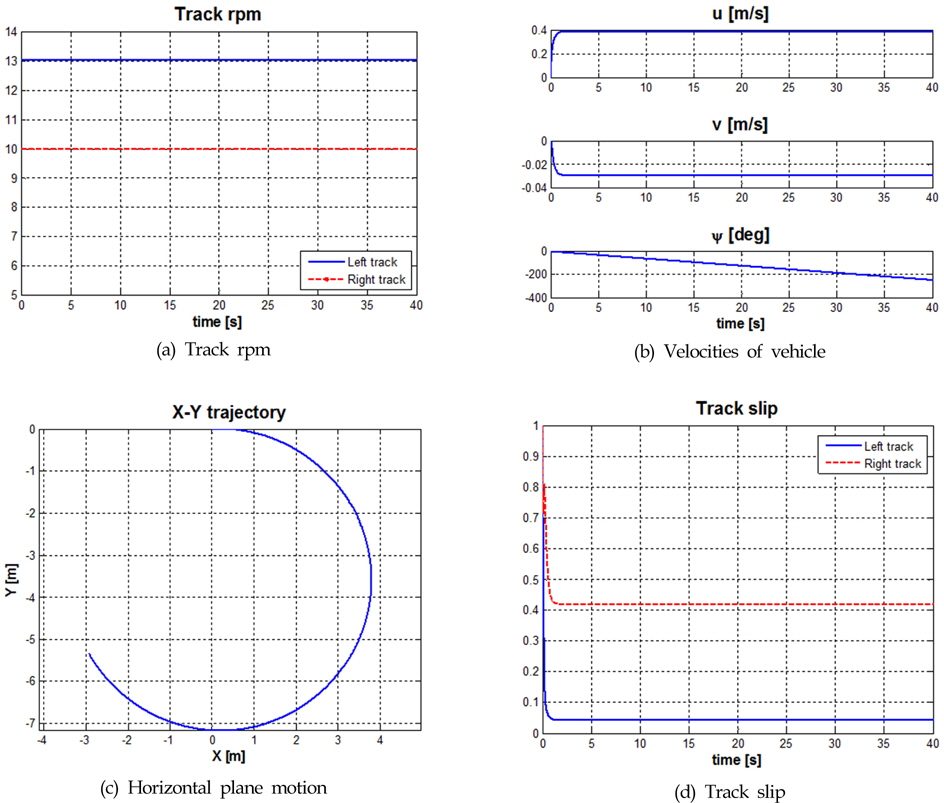
м„ нҡҢмҡҙлҸҷ мӢң뮬л Ҳмқҙм…ҳмқҳ кІҪмҡ° м–‘мӘҪ к¶ӨлҸ„мқҳ мһ…л ҘмқҖ Fig. 6 (a)м—җм„ңмІҳлҹј мўҢ, мҡ° к¶ӨлҸ„мқҳ нҡҢм „мҶҚлҸ„лҘј к°Ғк°Ғ 13, 10rpmмқ„ м„Өм •н•ҳмҳҖлӢӨ. мқҙл•Ң м§Ғ진주н–үкіјлҠ” лӢӨлҘҙкІҢ мўҢ, мҡ° к¶ӨлҸ„мқҳ мҶҚлҸ„м°Ёмқҙм—җ л”°лҘё нҡЎл°©н–Ҙмқҳ мҶҚлҸ„мҷҖ л°©н–Ҙк°Ғмқҙ мғқк№Җмқ„ Fig. 6 (b)лҘј нҶөн•ҙ м•Ң мҲҳ мһҲкі , к·ём—җ л”°лҘё лҜёлҒ„лҹј мЎ°н–Ҙмқ„ н•ҳм—¬ Fig. 6 (c)мҷҖ к°ҷмқҙ м„ нҡҢмҡҙлҸҷмқҙ мқҙлЈЁм–ҙм§җмқ„ нҷ•мқё н• мҲҳ мһҲлӢӨ. Fig. 6 (d)лҠ” к·ёл•Ңмқҳ мўҢ, мҡ° к¶ӨлҸ„мқҳ мҠ¬лҰҪмқ„ лӮҳнғҖлӮёлӢӨ.
3.3 Trenching мһ‘м—… мӢң м§Ғ진주н–ү
Trenching мһ‘м—… мӢң мЈјн–ү мӢң뮬л Ҳмқҙм…ҳмқҳ кІҪмҡ° к°ңл…җм„Өкі„мғҒ м„Өм •н•ҙ л‘” мҡҙмҡ© лӘ©н‘ңмқё мөңкі мЈјн–үмҶҚлҸ„ 2km/h(0.56m/s)мҷҖ Trenching мһ‘м—… мӢң мөңлҢҖ мһ‘м—… мҶҚлҸ„мқё 300m/h(0.08m/s)мқ„ к°Җм§ҖлҸ„лЎқ к¶ӨлҸ„ нҡҢм „мҶҚлҸ„лҘј мЎ°м Ҳн•ҳм—¬ мӢң뮬л Ҳмқҙм…ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. мқҙл•Ң Trenching cutter barмқҳ нҡҢм „к°ҒлҸ„ П•лҠ” 15В° ~ 45В°м—җм„ң мҡҙмҡ©н•ҳлҸ„лЎқ к°Җм •н•ҳмҳҖмңјл©°, л§Өмҡ° м ҖмҶҚмқҳ мһ‘м—…мҶҚлҸ„мқё 0.08m/sлЎң мҡҙмҡ©н•ҳлҜҖлЎң м§Ғ진 мӢң뮬л Ҳмқҙм…ҳл§Ң мҲҳн–үн•ҳмҳҖлӢӨ.
мқҙл•Ң мӢң뮬л Ҳмқҙм…ҳ кІ°кіјлҠ” Table 3м—җм„ң лӮҳнғҖлӮё л°”мҷҖ к°ҷкі , нҲҙмқҳ к°ҒлҸ„к°Җ 15В°м—җм„ңл¶Җн„° м§Җл©ҙкіј л§һлӢҝкё° мӢңмһ‘н•ҳлҜҖлЎң к·ёл•Ңмқҳ мҲҳнҸү, мҲҳм§Ғл°©н–Ҙмқҳ л°ҳл ҘмқҖ 0мқҙлӢӨ. лҳҗн•ң нҲҙмқҳ к°ҒлҸ„к°Җ мҰқк°Җн• мҲҳлЎқ TrencherмҷҖ м§Җл©ҙкіј лӢҝлҠ” л©ҙм Ғмқҙ мҰқк°Җн•Ём—җ л”°лқј мғқкё°лҠ” л°ҳл ҘлҸ„ мҰқк°Җн•ҳлҜҖлЎң к¶ӨлҸ„ мҠӨн”„лқјмј“м—җм„ң н•„мҡ” нҶ нҒ¬ лҳҗн•ң мҰқк°Җн•Ёмқ„ м•Ң мҲҳ мһҲлӢӨ. мқҙл•Ң нҶ нҒ¬лҠ” к¶ӨлҸ„ мҠ¬лҰҪм—җ мқҳн•ҙ л°ңмғқн•ҳлҠ” м§Ғ진방н–Ҙмқҳ м „лӢЁл Ҙкіј к¶ӨлҸ„ мҠӨн”„лқјмј“мқҳ л°ҳкІҪм—җ мқҳн•ҙ кө¬н• мҲҳ мһҲлӢӨ.

4. кІ° лЎ
ліё л…јл¬ём—җм„ңлҠ” нҠёлһҷкё°л°ҳ н•ҙм Җ мӨ‘мһ‘м—…мҡ© мҲҳмӨ‘лЎңлҙҮмқҳ н•ҳл¶Җн”„л Ҳмһ„мқё к¶ӨлҸ„м°Ёлҹүмқҳ мҡҙлҸҷ лӘЁлҚёл§Ғ л°Ҹ мһ‘м—…мҡ© нҲҙмқё Trencherмқҳ лӘЁлҚёл§Ғмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. лӘЁлҚёл§Ғлҗң мӢңмҠӨн…ңмқҳ лҸҷм Ғкұ°лҸҷ л°Ҹ м„Өкі„лӘ©н‘ң м„ұлҠҘмқ„ нҷ•мқён•ҳкё° мң„н•ҳм—¬ Matlab/Simulink н”„лЎңк·ёлһЁмқ„ мқҙмҡ©н•ҳм—¬ мҲҳм№ҳ мӢң뮬л Ҳмқҙм…ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. мқҙлҘј нҶөн•ҙ к¶ӨлҸ„к°Җ нҡҢм „н•Ём—җ л”°лқј нҶ м–‘кіј к¶ӨлҸ„мӮ¬мқҙм—җм„ң мғқкё°лҠ” м „лӢЁл Ҙм—җ мқҳн•ҙ м°Ёлҹүмқҙ мЈјн–үн•ҳкі , м„ нҡҢмҡҙлҸҷмқҳ кІҪмҡ° мўҢ, мҡ° к¶ӨлҸ„мқҳ мҶҚлҸ„м°Ёмқҙм—җ мқҳн•ң лҜёлҒ„лҹј мЎ°н–Ҙмқ„ н•ҳлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ. лҳҗн•ң, м„Өкі„лӘ©н‘ңмқё Trenching мһ‘м—…мӢң мөңлҢҖ мҶҚлҸ„лЎң мҡҙмҡ©н• мӢң н•„мҡ”н•ң к¶ӨлҸ„ мҠӨн”„лқјмј“мқҳ мөңлҢҖ нҶ нҒ¬лҘј кі„мӮ°н•ҳмҳҖлӢӨ.
к¶ӨлҸ„м°Ёлҹүмқҳ мҡҙлҸҷлӘЁлҚёмқ„ мқҙмҡ©н•ҳм—¬ мҡҙлҸҷм„ұлҠҘн•ҙм„қмқҖ л¬јлЎ к¶ӨлҸ„м°Ёлҹүмқҳ мһҗмңЁмқҙлҸҷмқ„ мң„н•ң м ңм–ҙкё° м„Өкі„ лӘЁлҚёлЎңлҸ„ мӮ¬мҡ©н•ҳкі мһҗ н•ҳл©°, Trencherмқҳ лӘЁлҚёмқ„ мқҙмҡ©н•ҳм—¬ н•„мҡ”н•ң мөңлҢҖнҶ нҒ¬ кі„мӮ°мқ„ н•ЁмңјлЎңмҚЁ к¶ӨлҸ„м°Ёлҹүкіј TrencherлҘј кө¬лҸҷн•ҳлҠ”лҚ° н•„мҡ”н•ң кө¬лҸҷлӘЁн„° мҡ©лҹүмқҳ м„Өкі„м—җ н•„мҡ”н•ң мһҗлЈҢлҘј м ңкіөн• мҲҳк°Җ мһҲлӢӨ.
н–Ҙнӣ„ м—°кө¬лЎңлҠ” нҶ м–‘лӘЁлҚёмқ„ н•ҙм Җм§Җл°ҳкіј мң мӮ¬н•ң л¬јм„ұм№ҳлҘј к°Җм§ҖлҠ” нҶ м–‘ лҳҗлҠ” н•ҙм Җм§Җл°ҳмқҳ мӢӨн—ҳлӘЁлҚёмқ„ 추к°Җн•ҳкі , н—ҳм§Җ л°Ҹ кІҪмӮ¬лЎңк°Җ кі л Өлҗң мҡҙлҸҷ лӘЁлҚёл§Ғмқ„ мҲҳн–үн• кі„нҡҚмқҙлӢӨ. 추к°Җм ҒмңјлЎң мЎ°лҘҳ л°Ҹ м—¬лҹ¬ к°Җм§Җ мҷёлһҖмқҙ л°ңмғқн•ҳм—¬лҸ„ Trenching мһ‘м—…мқ„ н•ҳл©ҙм„ң л°©н–Ҙк°Ғмқ„ мң м§Җн• мҲҳ мһҲлҸ„лЎқ н•ҳлҠ” м§Ғ진주н–ү м•Ңкі лҰ¬л“¬мқ„ к°ңл°ңн•ҙ лӮҳк°Ҳ кі„нҡҚмқҙлӢӨ.




