심해무인잠수정 해미래를 이용한 남마리아나 아크 해저화산 열수분출공 탐사
Explorations of Hydrothermal Vents in Southern Mariana Arc Submarine Volcanoes using ROV Hemire
Article information
Abstract
This paper presents the explorations of hydrothermal vents located in the Marina Arc and Back Arc Basin using the deep-sea ROV Hemire. These explorations were conducted by KRISO and KIOST to demonstrate the capability of Hemire in various applications for deep-sea scientific research. The missions included the following: (1) to search the reported vents, (2) conduct visual inspections, (3) deploy/recover a sediment trap and bait traps, (4) sample sediment/water/rock, (5) measure the magnetic field at the vent site, and (6) acquire a detailed map using multi-beam sonar near the bottom. We installed three HD cameras for precise visual inspection, a high-temperature thermometer, a three-component magnetometer, and a multi-beam sonar to acquire details of the bottom contour or identify vents in the survey area. The explorations were performed in an expedition from March 23 to April 5, 2016, and the missions were successfully completed. This paper discusses the operational process, navigation, and control of Hemire, as well as the exploration results.
1. 서 론
심해무인잠수정 해미래는 6,000m급 ROV(Remotely operated vehicle)이며 해양수산부의 지원으로 수행된 연구사업의 결과물로써 2007년 개발됐다(Lee., 2007). 이 사업의 2단계 연구로 2007년부터 2012년까지 해미래를 이용한 활용연구가 진행됐다(Lee, 2012). 해미래를 이용한 동해탐사는 지금까지 7회 수행됐으며, 2015년 6월에는 15일 탐사 일정으로 동해의 관심해역 8개 지점에 대해 심해 퇴적물 채집, 생물 채집, 심해생태계 관찰 및 심해저환경 모니터링 등을 수행했다(Kim et al., 2015a).
해미래는 2014년과 2015년 성능개량이 이루어졌다. 아날로그타입의 영상시스템은 디지털 타입의 HD 카메라 시스템으로 개선됐다(Beak et al, 2014; Baek et al., 2015). 기존에 개발자 위주로 되어 있는 사용자 인터페이스 구조(Lee et al., 2007)를 운용자 중심으로 대체하여, 클라이언트-서버 구조로 개편했다(Kim et al., 2014). 심해탐사를 위한 다양한 임무 요구에 효과적으로 대응하기 위해 하드웨어와 소프트웨어 측면에서 장치 확장성을 확보하는 연구가 수행됐다(Kim et al., 2015b).
2015년 수행된 동해탐사는 대상해역이 여러 곳이지만 왕돌초협곡을 제외한 대부분의 지역이 평평하고 완만한 경사를 갖는다. 심해화산과 같이 지형변화가 심한 급경사 지역을 대상으로 해미래의 탐사 성능을 검증할 필요가 있었고, 이에 따라 2016년에는 지형변화가 심한 해저화산 탐사를 결정했다. 대상 해역은 연구가 활발히 진행되었던 남마리아나 아크 해저화산 지역으로 선정했으며, 해미래의 탐사성능을 검증하고 보완하기 위한 목적으로 열수분출공 정밀탐사가 추진됐다.
탐사대상해역은 1,500m 수심의 Forecast 해저화산과 3,000m 수심의 Archaean 열수분출공 지역으로 선정됐다. 이곳은 서태평양 미국령 괌에서 서쪽 70-150km에 위치한 마리아나 열도 및 후열도 확장대(Fig. 1 참조)이며, 열도화산작용에 의해 생성된 열수공이 열수를 분출하고 있는 것으로 보고되어 있다(Embley et al., 2004; Baker et al., 2005; Embley et al., 2007). 해미래의 해저화산 탐사작업은 열수공 수색, 영상관측 및 주변해역에서의 해양과학 데이터 취득을 목적으로 한다. 이를 위하여 CTD(Conductivity, temperature and depth) 센서, CO2-CH4(이산화탄소-메탄) 센서를 활용한 해양물리자료 획득, 푸시코어(Push core), 스쿠프(Scoop), 채수장치(Niskin bottle), 미끼어망 (bait trap) 등을 활용한 지질·생물시료 획득, 열수공으로부터 분출되는 입자플럭스 측정을 위한 침전물포집장치(Sediment trap)의 설치·회수, 해저면 근접 정밀 지형 측정 및 해저화산 주변의 지자기 측정 시험 등을 포함한다.

Location map of ROV survey for seafloor hydrothermal vents (indicated by red box).
마리아나 해역 열수탐사는 2016년 3월 23일부터 4월 5일까지 14일 일정으로 수행됐고, 이 탐사를 통해 심해무인잠수정 해미래의 열수분출공 탐사 기능을 확인할 수 있다. 본 논문은 2장에 열수탐사를 위한 해미래의 HD 카메라 시스템 확장, 열수계측센서 및 기타 탐사장비 인터페이스에 대해 설명하고, 3장에 열수탐사를 위한 잠수정 운용 프로세스, 임무에 따른 제어 절차, 데이터 분석 및 탐사결과를 기술하고, 마지막 장에 결론을 정리했다.
2. 해미래의 성능개량 및 장비 인터페이스
마리아나 열수해역 탐사를 위한 해미래 임무는 다음과 같다.
열수분출공 수색, 영상자료 취득 및 주변 해저관찰
열수생물 채집을 위한 미끼어망 설치 및 회수
열수분출입자 포집을 위한 침전물포집장치 설치 및 회수
열수분출공 주변 퇴적물 샘플링(푸시코어링, 스쿠핑)
열수분출공 수온측정, 해수 채수 및 암석 샘플링
해저화산 주변 지자기 측정, 정밀 지형측정
이 임무 수행을 위해 HD 카메라 채널 확장과 함께 이더넷 기반의 계측장치 인터페이스를 위하여 통신계통을 개선했다.
파일럿이 작업하는 중에도 과학자가 자유롭게 해저를 관측하는 것과 수중작업 효율성 제고를 위해 HD 카메라 2대를 추가 제작했다. 제작된 카메라는 HD 칼라 카메라 모듈을 내압하우징에 탑재하고, 이더넷 광변환기를 이용해 선상제어실과 통신한다(Beak et al, 2014; Baek et al., 2015). 카메라 전용 내압용기를 별도 제작해 모든 카메라 신호는 전용용기와 내압용기의 이더넷 스위치를 통해 선상으로 전송된다. Fig. 2는 카메라 시스템의 네트워크 연동을 나타낸다. 파일럿과 과학자 카메라(HD Cam 1, 2)는 각각 P/T(팬/틸트)장치로 조정할 수 있고, 수직카메라(HD Cam 3)는 램프프레임에 고정했다.
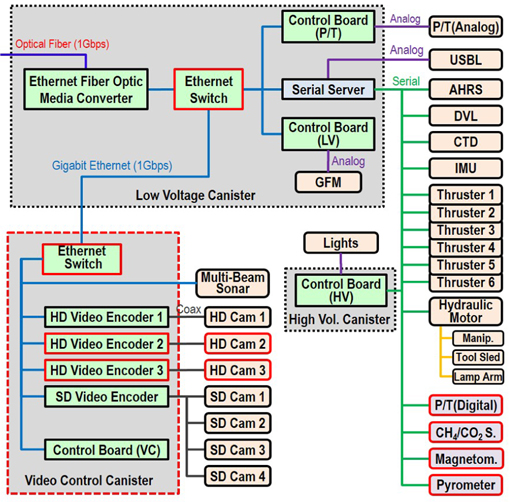
Network and interface of the equipment of Hemire for the hydrothermal vent exploration (the red blocks are added).
300℃ 이상의 열수 온도측정을 위해서는, 고온센서를 로봇팔로 집어 2m 이상 떨어진 거리의 열수 온도를 측정할 수 있어야 한다. 본 논문에서는 이를 위하여 전용 고온센서를 개발했다. 온도센서는 백금 RTD(Resistance temperature detector) 프로브와 변환기(Muesen Technik, HART MTS885; 범위: -200~600℃)를 이용하고 독립 내압용기에 통신변환기를 내장해 제작했다. 스프링 형태로 제작된 수중 케이블이 경통형 보호관에 고무줄로 당겨들어 가는 구조의 열수온도측정용 센서를 개발했다. Fig. 3은 해미래 툴슬레드(Tool-sled)에 설치된 고온센서를 보인다.

Extractable high-temperature thermometer.
침전물포집장치는 한국해양과학기술원이 보유한 시계열 퇴적물 포집장치(McLane Parflux Mark8–3; 높이 116cm, 폭 66cm, 포집표면적 0.25m2, 중량 공기중 42kg, 수중 18kg)를 이용했다. 이 포집장치는 해류에 밀리거나 쓰러지는 것을 방지하기 위하여 발라스트 웨이트를 하부 프레임에 부착했고, 중간에 손잡이를 장착해 공기중 중량이 약 60kg(수중 약 33kg)에 이른다. 해저 설치·회수 방법은 포집장치를 해미래 툴슬레드에 적재해 해저로 보내고 로봇팔을 이용해 지정위치에 설치·회수하는 것으로 정했다. Fig. 4는 침전물포집장치 설치를 위한 잠항인 Dive-04의 계측·샘플링장비 탑재상태를 보인다.
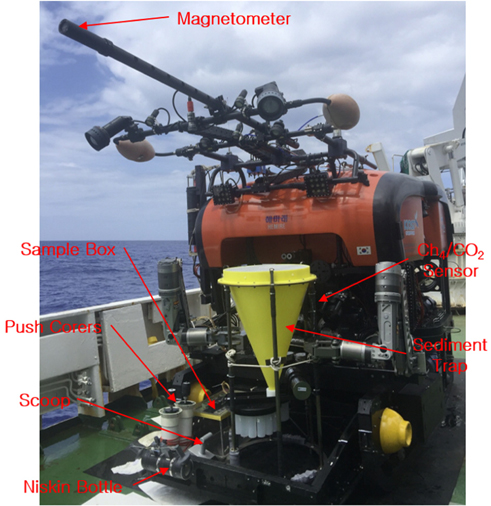
Hemire ROV equipped with the sampling devices for Dive-04.
해저화산 지역의 지자기 계측을 위하여 해미래에 자력계를 추가 장착했다. 지자기 센서는 3성분 디지털 자력계(Honeywell HMR2300; ±1G 범위에서 정확도 <0.5 FS, ±2G 범위에서 해상도 70μG, 10~154 sps, RS232)이다. 자력계는 잠수정 자체의 자기장 영향을 최소화하도록 긴 봉을 램프 프레임에 고정시키고 봉 종단에 설치했다. 자력계는 해미래 상단으로부터 1.63m 돌출됐으며, Fig. 4에서 설치 상태를 볼 수 있다.
불규칙한 지형특성을 갖는 해저화산 지역에서 정밀작업을 위해 M3 소나(Kongsberg Mesotech; 멀티빔소나(MBS, Multi-Beam Sonar) 모드 또는 초음파카메라(AC, Acoustic Camera) 모드 운용)를 추가 탑재했다. M3 소나는 비디오 제어 캐니스터를 통해 연결되어 이더넷으로 통신되며, Fig. 2에 연동 체계가 나타나 있다. M3 소나는 MBS 모드로 운용되며(Dive-01~05), 지형변화가 심해 곳에 설치된 미끼어망 회수시 작업을 지원하거나 흑연열수 수색시 보조정보로 사용할 경우에는 AC 모드로 운용됐다(Dive-06~09).
3. 남마리아나 해저화산 및 확장대 열수 탐사
마리아나 해저화산 및 후열도 확장대 탐사를 위한 지역은 당초 포케스트(Forecast) 해저화산, Seamount X, 남마리아나 후열도 확장대(Archaean vent site) 등 열수활동이 알려진 세 곳이었으나, 탐사를 진행하면서 두 지역에 집중했다.
포케스트 해저화산: 130°04.9´E, 36°06.4´N
남마리아나 후열도 확장대: 143°38.0´E, 12°56.4´N
해미래는 과학잠항 9회 및 기술잠항 1회를 포함하여 총 10회 잠항했다. 탐사 진행중 관심사항이 변경됨에 따라 잠항 임무가 수정됐으며, 잠항 내용과 일정은 해상조건과 잠수정 상태에 따라 수시로 조정됐다. 마리아나 열수지역 탐사를 위한 해미래의 잠항기록을 Table 1에 요약했다.
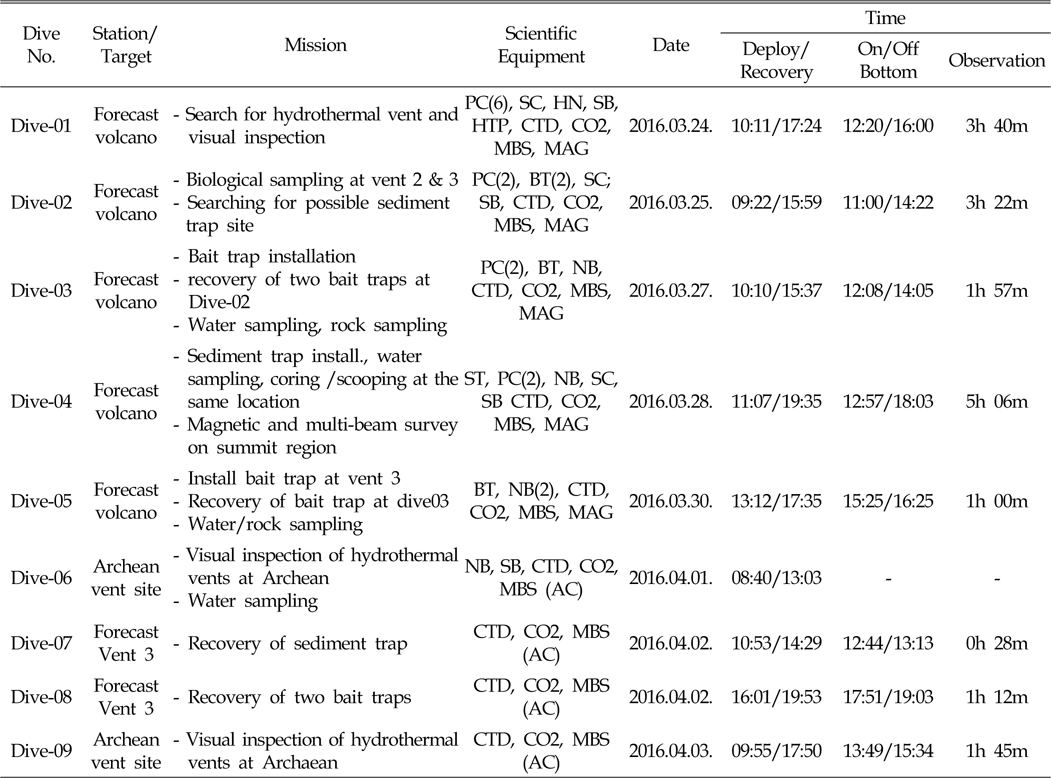
Dive summary of Mariana explorations of Hemire.
3.1 포케스트 해저화산 열수분출공 탐사
포케스트 해저화산은 마리아나 해저화산대 남단에 위치하고, 수심 1450m인 정상부에는 5개의 열수분출공이 보고되어 있다(Embley, 2006). 이중에서 3개 열수분출공을 정상부에서 찾아 탐사를 수행했고, 3개 열수분출공의 위치는 다음과 같다.
Vent 1 : 13° 23.720’N, 143° 55.190’E
Vent 2 : 13° 23.690’N, 143° 55.200’E
Vent 3 : 13° 23.673‘N, 143° 55.204’E
탐사에 앞서 온누리호 멀티빔소나를 이용하여 포케스트 해저화산 지형도를 제작했고(Fig. 5 참조), 이를 기준으로 모선, 해미래, 해누비 디프레서(Lee, 2007) 각각의 수중위치를 모니터링하며 해미래 시스템을 통제했다. 목표수심이 약 1,500m이므로 해미래 잠항 속도를 고려하여 목표점으로부터 약 1km 떨어진 위치에서 잠수정을 진수시키고, 목표점 방향으로 0.5노트(0.257m/s) 이하 선속으로 예인하며 잠항했다. 잠항시에 윈치케이블 페이아웃(Pay-out) 속도가 20m/min을 넘는 경우에 해누비 상하운동이 과도해져 A프레임의 케이블 시브(Sheave)가 점핑하는 현상이 종종 발생했다. 따라서 잠항속도는 20m/min을 넘지 않게 운용했다. 한편 부상속도는 잠항속도 보다 높아도 점핑현상이 없으므로 윈치케이블 홀인(Haul-in) 속도는 20~40m/min 범위에서 유지했다.
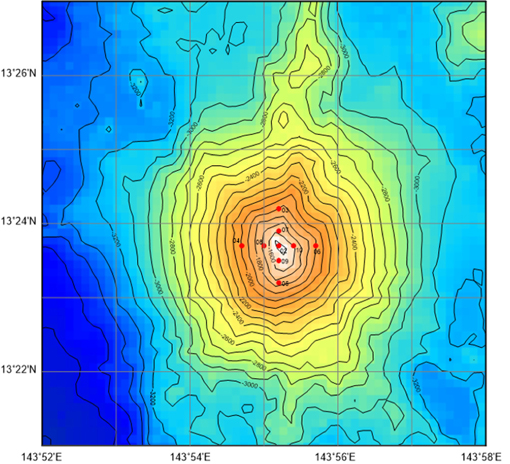
Bathymetry map of the Forecast volcano.
해미래가 고도 50m에 도달하면 탐사모드로 전환했고, 목표점 200m 전방 지점부터 해미래 고도를 10m 이내로 낮추어 포케스트 화산을 관측했다. 위치측정은 USBL(Ultra short baseline)과 관성항법시스템을 이용했다. USBL은 리스폰더 모드를 이용했으며, 신호수신 상태에 따라 트랜스폰더 모드로 전환하여 운용했다. 4초 또는 6초 마다 위치정보가 업데이트 됐다. 해미래 통합제어는 관성항법시스템 정보를 사용했고, USBL과의 위치 바이어스 오차가 커지면 USBL 신호로 위치를 보정하는 방식으로 운용했다. HD 카메라 영상에는 관성항법시스템 위치정보가 기록된다.
Fig. 6은 Dive-01에서 USBL로 계측된 해미래 및 해누비 디프레서의 X-Y평면 궤적을 나타낸다. 그림은 USBL 아웃라이어를 제거한 상태이나, 아웃라이어는 Dive-01 탐사 3시간 40분 동안 6회 발생할 정도로 거의 일어나지 않았고, 위치오차는 표준편차로 4~5m이다. 그림에서 USBL 신호의 빈도가 높은 지역은 열수 분출공이 발견된 곳으로써 해미래가 체류하는 시간이 긴 지점이다.

X-Y trajectory of Hemire and Henuvy in Dive-01.
탐사 전반기에 ROV가 목표지점에 도달했으나, 모선이 목표궤적 추적에 어려움이 있어 풍향을 고려하여 모선 방향을 변경했다. 모선이 변침하면서 해누비가 서쪽으로 드리프트했고, ROV는 해누비를 따라 이동하며 대기했었다. 그림에서 상단 좌측 타원형 궤적은 열수분출공에서 서쪽으로 벗어난 잠수정 위치를 나나낸다. 탐사 후반기에 잠수정은 남쪽방향으로 약 200m 내려오면서 포케스트 정상부를 관찰했고 다시 북상하며 관찰했다.
Fig. 7은 Dive-01에서의 해미래 운항정보 및 과학센서 계측 데이터 세트를 나타낸다. 수심신호 중에서 USBL 수심은 해저탐사 시간동안 6회의 아웃라이어가 있었음을 알 수 있다. 고도신호는 피크형태로 ‘0’의 값을 보이는 부정확한 계측이 위치에 따라 빈번하게 발생했다. 해저 정상부는 경사도가 매우 심하고 지역에 따라 수직절벽이 존재한다. 이런 지역에서는 반사파의 영향 및 DVL(Doppler velocity log) 빔 수신이 불가능한 경우가 발생하여 속도와 고도 계측이 부정확했다. 이때 얻어진 DVL 속도신호는 신뢰할 수 없는 값이며, 속도정보를 이용하는 수중관성항법은 오차가 점차 누적된다. 따라서 해미래는 탐사중 심도제어와 헤딩제어만을 이용했고, USBL과 관성항법 오차가 20m에 이르거나 해미래가 정지상태일 때에 USBL 신호로 수평면 위치를 리셋했다.

Hemire status and measurements in Dive-01: (1) depth, altitude, (2) velocities Vx, Vy, Vz, (3) roll, pitch, yaw, (4) CTD (Temp. Cond. Sali.), CO2.
해미래는 열수분출공이 있는 곳에서 정밀 관측을 위하여 경사진 바위 언덕에 툴슬레드 앞부분을 걸치고 작업했다. 이 상태에서 해미래 툴슬레드 부분은 바위 언덕에 고정되나, 몸체는 공중에 떠 있으므로 좌우 또는 상하로 서서히 흔들렸다. 이 상태(Fig. 7의 6,500초 구간과 8,000초 구간)에서는 롤(Roll) 또는 피치(Pitch)가 옵셋 값을 갖는데, 이는 해미래가 선수를 경사진 바위에 걸치고 수직추진기로 누르는 힘을 주면서 주추진기로 전진방향 힘을 주고 있으므로, 해미래 온도, 전도도, 염도 및 CO2 센서의 분압을 나타낸다. 열수가 분출되는 지역에서 온도와 전도도가 올라가며, 염도가 변동했다. CO2 분압도 열수분출공 지역에서 변동하는 것을 알 수 있다. Fig. 8은 Dive-01, 02, 03에서 온도변화가 있는 곳을 표시한 그림으로써, Vent 3 부근의 해수 온도가 높게 나온 것을 알 수 있다. 포케스트 해저화산 열수분출공 탐사를 위한 잠항은 총 7회 실시됐다. Fig. 9는 Dive-01~08 각각에 대하여 해미래의 수평면 궤적을 나타낸다. 해미래은 Vent 1, 2, 3을 관측했고, 특히 Vent 2와 3를 정밀 조사했으므로 위치신호가 이 부근에 밀집되어 해미래가 장시간 체류했음을 보인다.
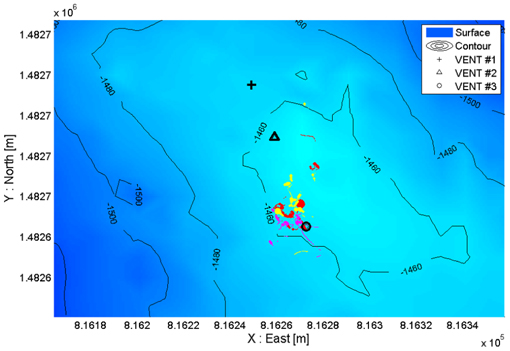
Temperature variation map near the Forecast vents area.
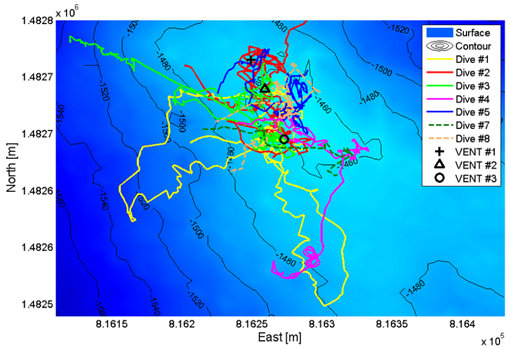
ROV tracks for hydrothermal vents on summit area of the Forecast volcano.
Dive-01에서는 해저화산 정상부에서 열수분출공을 탐지하는 임무를 수행했다. 해미래가 남쪽으로 이동하면서 부유입자 밀도가 증가하는 것을 관측했고, 최종적으로 열수분출공 Vent 3가 확인됐다. 관찰된 열수분출공은 투명한 열수를 분출하고 있으며, 열수공 침니에는 생태계가 형성되어 많은 수의 눈먼게, 장님새우 및 심해 달팽이가 관측됐다(Fig. 10 상&중 참조). 이 주변에는 활동을 멈춘 침니(Dead chimney)가 산재해 있다(Fig. 11 상). Vent 1 지역은 주로 규모가 작은 분출공이 분포하고, Vent 2는 Vent 1과 Vent 3의 중간 규모이다. 정상부 남쪽에서는 많은 개체의 심해산호 군락이 형성되어 있음을 확인했다(Fig. 11 중). 영상관측을 위해 해미래가 이동 중에, 로봇팔로 핸드 네트를 꺼내 들어 부유플랑크톤을 채집했다. 이 채집 실험에서, 해미래는 20분 동안 약 250m 거리를 이동했고(Fig. 11 하), 평균이동속도는 0.4노트였다.

(top/mid) Forecast Vent 3 and vent community, (bottom) temperature measure with pyrometer.

Visual inspection: (top) dead chimneys, (mid) Deep-sea corals, (bottom) sampling zooplankton with hand-net.
Vent 3를 대상으로 열수온도를 측정했다(Fig. 10 하). 고온센서를 열수분출공의 중심에 안정적으로 유지하는 것이 여의치 않아 수온 측정이 정확하지 않았으나, 온도가 올라가는 경향은 파악할 수 있었다(열수공 주변 열수온도가 20~30°로 측정됨). 열수공에서 분출하는 열수 온도를 정확하게 측정하기 위해서는 분출공의 작은 틈으로 센서를 삽입할 수 있도록 로봇팔 조작에 능숙해야 한다. 수중 3차원 공간에서 작업을 정확히 수행하는 조종훈련이 필요하며, 센서 프로브를 보다 길게(깊게) 만드는 것이 요구된다.
열수탐사에서 미끼어망 설치 및 회수, 푸시코어와 스쿠프를 이용한 해저 퇴적물 채집, 채수장치를 이용한 해수 샘플링, 열수 온도측정, 암석채집 등 모든 샘플링 작업은 로봇팔을 이용했다.
해미래는 로봇팔을 이용하여 미끼어망을 Vent 2와 Vent 3 지역에 각각 2개씩 설치했다. 미끼어망을 설치한 후 1일~3일 경과 후 회수했으며, 눈먼게, 새우붙이, 장어 등의 생물이 채집됐다. 처음 제작된 미끼어망은 그물망이 성긴 것으로써 회수과정에서 대부분의 심해생물들이 빠져나가는 것이 목격됐다. 미끼어망에 조밀한 망을 추가했고, 보완조치 이후에는 많은 개체를 채집할 수 있었다. Fig. 12(상)은 조밀한 망을 갖는 사각형 미끼어망에 많은 수의 생명체가 잡혀 있는 것을 보인다. 이 트랩에 열수생명체가 148마리 채집됐다. 하단 그림은 성긴 망으로 만들어진 원통형 미끼어망 회수장면이며, 큰 크기의 눈먼게만이 포획됐다.

Bait trap recovery near Vent 3 of Forecast volcano: (top) Pilot view, (bottom) top view with vertical camera.
포케스트 해저화산의 열수분출공에서 유출되는 입자플럭스를 측정하기 위하여 침전물포집장치를 설치했다. 퇴적물 포집장치는 크기가 클 뿐만 아니라 중량이 무거운 편이므로 작업에 주의가 필요했다. 설치순서는 포집장치를 우측 로봇팔로 들고, 이 상태에서 툴슬레드를 끌어들이고, 경사진 해저 퇴적토 중에서 설치하기에 가장 적합한 지점으로 로봇팔을 길게 뻗어 포집장치를 위치시키고, 포집장치를 수직방향으로 내려놓으면서, 지면에 닿은 후에도 서서히 누르며 착지시켜 수직한 자세가 되도록 설치했다. Vent 3으로부터 동남동 방향으로 약 50m 떨어진 완만한 경사면에 해미래를 착지하고 침전물포집장치를 설치했다. Fig. 13(상)은 Vent 3 근처에 설치된 퇴적물 포집장치를 나타낸다.
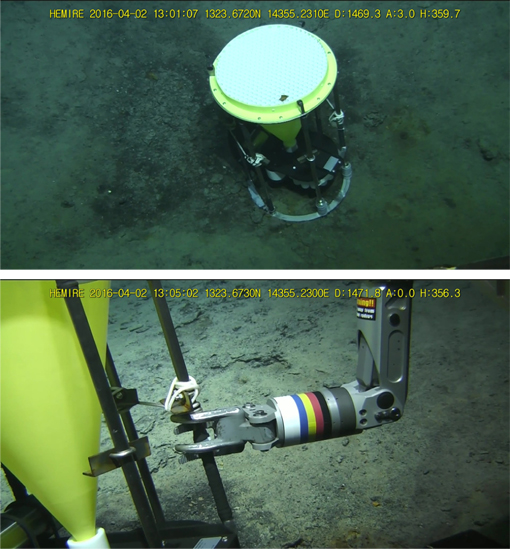
(top) Sediment trap deployed at Forecast volcano, (bottom) recovery of the sediment trap 5 days later.
침전물포집장치 회수는 설치의 역순으로 수행했다. 우측 로봇팔을 이용하여 포집장치를 들은 다음에(Fig. 13 하), 시료 바구니를 밀어내었다. 이때 수직 카메라와 파일럿 카메라를 이용하여 시료바구니와 포집장치의 간섭을 확인하며 작업을 수행했다. 툴슬레드가 충분히 빠져나온 후 포집장치를 틀슬레드 위에 올려놓았다. 이후 양쪽 로봇팔로 포집장치를 붙잡은 상태에서 유압 전원을 차단하고 해미래를 부상시킨다. 해미래가 수면 근처(약 100m)에 도달했을 때 유압시스템을 다시 작동하여, 포집장치를 잡고 있는 그래버에 유압을 가했다. 전원이 차단될 경우 그래버는 유압이 빠진다. 따라서 수면근처에서 파도운동에 의해 침전물포집장치가 흔들려 불안정한 자세가 될 수 있으므로 이를 방지하기 위한 조치이다.
해미래에 장착된 멀티빔소나와 3성분자력계를 이용하여 해저면 근접 정밀지형조사 및 지자기 변화를 계측했다. 이 실험은 침전물포집장치 설치 임무를 완수한 이후 이어서 수행됐다. 해저산 정상부 주능선 방향을 따라 약 150m 길이의 측선 2개와 이에 수직한 측선 1개를 설정하고, 이 측선을 따라 해미래가 이동하며 3성분자력계와 멀티빔소나 신호를 취득하는 전략이다.
한편, 앞서 언급한 바와 같이 침전물포집장치는 수중 무게가 약 33kg이므로, 해미래가 포집장치를 내려놓으면 부력이 33kg 증가하게 된다. 한편, 해미래는 부력에 의한 정적하중을 순방향 궤환(Feed forward)으로 보상하고 심도 오차를 PD제어하는 방식 Fdepth control = Ffeed forward +FPD으로 심도제어기가 구성되었다.
이 방법은 부력에 의한 외력을 순방향 보상함으로써 안정적인 심도 제어를 구현할 수 있다. 수중부력이 변하는 경우에는 순방향 제어성분을 변경하는 것이 필요하다. 본 연구에서는, 해미래가 침전물포집장치를 설치한 이후, 수동제어 모드로 전환하여 추진기를 수동으로 제어하며 심도를 유지하는 수직추진기 명령을 찾았으며, 이 값을 순방향 궤환 제어력으로 대체하고, 심도제어 모드로 전환하여 자동제어를 수행했다. 본 실험에서 해미래는 일정 수심을 유지하도록 심도제어를 수행하면서 궤적을 추적했다. 해미래가 해저화산 정상부에서 약 30m의 고도를 갖도록 1,418m 수심을 유지하게 제어했다.
DP(Dynamic positioning)를 갖추지 못한 온누리호가 주어진 측선을 정확하게 추적하는 것은 어려운 작업이다. 해미래가 궤적을 따라 이동하기 위해서는 해누비가 함께 이동해야 하는데, 온누리호가 해누비를 정확한 궤적으로 이동하도록 예인하는 것은 거의 불가능하다. 본 연구에서는 해누비가 측선을 개략적으로 따라가도록 온누리호 항해사가 해누비 위치를 모니터링하면서 모선을 수동으로 조종했고, 해누비가 이동하는 궤적을 따라 해미래를 조종하며 지자기를 측정했다. Fig. 14는 포케스트 해저화산 주변의 지자기 측정을 위한 해미래의 이동궤적을 나타낸다. 굵은 적색실선은 3개 측선을 따르는 해미래 궤적을 나타낸다. DP 비장착 모선이 여러 개의 측선을 타기 위해서는 커다란 선회반경이 필요했고 오랜 시간이 소요됐다. 비록 궤적은 곡선이나 해미래의 위치, 운동과 자세 측정치를 이용하여 지자기 측정값을 보정할 수 있다. 지자기 측정결과는 한국해양연구원 심해저광물자원연구센터에서 분석중이다. 그림에서 하단의 ‘8’자 궤적은 지자기 센서의 캘리브레이션을 위한 것으로써 8자 궤적을 2회 반복하였다. 해누비 궤적이 직선이 아니었고, 해미래의 궤적 또한 구부러진 궤적을 보이고 있다. 8자 궤적은 해미래를 일정속도로 전진하면서 선수각을 일정한 속도로 변경하며 만들었다.
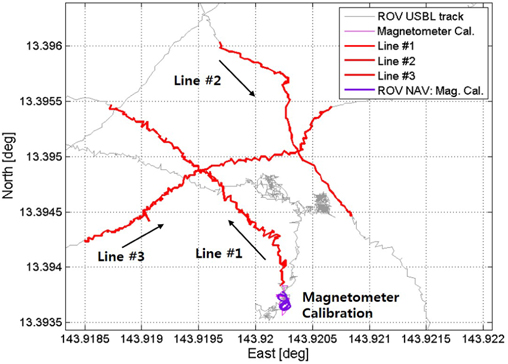
Planar track of Dive-04 for multibeam survey and magnetic field measurement with magnetometer.
한편, 탐사지역은 지형이 심하게 경사지고 굴곡져 있어, 지형 특성상 M3 소나의 음향반사 신호에 손실과 왜곡이 많이 발생했다. 또한 해저정밀지형 탐사가 주목적이 아니라 3성분 자력탐사실험과 병행하여 계측해 얻어진 자료이기 때문에, 빔의 중첩이 거의 이루어지지 않아서 포케스트 해저화산의 정밀 해저지형도 작성에는 무리가 있었다. 멀티빔소나를 이용하여 해저지형을 정밀하게 매핑하기 위해서는 보다 조밀한 간격으로 신호를 계측할 필요가 있다.
포케스트 화산 정상은 용암이 분출되어 지형변화가 매우 심하여 퇴적물이 쌓인 곳을 찾기 쉽지 않았다. 침전물포집장치를 설치한 지점이 퇴적물 채집에 가장 유리한 곳이므로, 포집장치를 설치하고 2~3m 뒤로 이동한 지점에서 푸시코어링과 스쿠핑을 실시했다. 화산지역에 쌓인 퇴적믈 층이 얕아 푸시코어러를 10cm 이상 누르면 해미래 본체가 들렸다. 따라서 퇴적물 채집을 위하여 한 지점에서 푸시코어링을 마치고 수평으로 이동해 다시 푸시하는 과정을 5회 반복해서 코어링하여 퇴적물을 채집했다. 스쿠핑은 해저면 표층을 따라 스쿠프를 훑으며 뜨는 방식으로 수행했다. Fig. 15(상)과 (중)은 푸시코어링과 스쿠핑 장면을 보인다. 니스킨보틀(Niskin bottle)을 이용한 채수는 필요한 지점에서 로봇팔을 이용하여 채수기의 트리거 버튼을 눌러 취득했다.

Sampling with the manipulator of Hemire (top) push coring, (mid) Scooping, (bottom) rock sampling
3.2 알키안(Archaean) 열수분출공 탐사
알키안 열수분출공을 탐사는 Dive-06과 Dive-09 2회 시도됐다. Dive-06는 잠항중 해상상태 악화로 인하여 모선에 과도한 피칭이 발생했으며, 과도 피칭이 반복되면서 1차 케이블 터미네이터 절연이 손상되어 탐사를 중단하고 해미래를 회수했다. 터미네이터 복구 후, 탐사 우선순위에 따라 포케스트 해역의 Dive-07, 08을 먼저 실시하고 이어서 알키안 열수탐사 Dive-09을 수행했다.
남마리아나 트러프의 확장축 바깥쪽 경사면에 위치하는 알키안 열수분출공은 약 3,000m 수심에 분포하고, 12° 56.30’N, 143°37.90’E 주변에 존재하는 것으로 보고됐다. Dive-09에서는 남북방향으로 200m 거리를 갖는 2개의 경유점을 지정하고, 이 중심으로부터 약 2km 북쪽방향에서 잠수정을 진수하여 0.5노트 이하로 예인하며 잠항했다. 수심 2,950m, 목표점 500m 북방 지점부터 해미래를 탐사 모드로 전환했고, 남쪽으로 이동하면서 알키안 열수지역 해저를 관측했다. Fig. 16은 알키안 열수지역을 탐사한 해미래의 USBL 궤적을 나타낸다. 수심이 포케스트 지역보다 깊어 해미래가 잠항할 때 모선과의 이격거리가 커지며 USBL의 위치수신에 아웃라이어가 포케스트의 경우보다는 더 자주 발생했다. 해미래가 해저면 근처에 이르러서는 한동안 블랙아웃 현상이 발생했다. 블랙아웃이 발생하면 해미래는 관성항법시스템만을 이용하여 운항했으며, 유효한 USBL 신호가 얻어지면 이를 이용하여 위치를 보정했다. 그림에서 붉은 선은 해미래 항법 궤적, 파란 선은 USBL 측정신호를 나타낸다. 그림 중앙의 해미래 항법 궤적에 아웃라이어가 발생한 것은 USBL 신호를 이용한 해미래 항법위치 보정에 잘못된 USBL 신호가 이용된 까닭이다. 정상 USBL 신호를 이용해 보정한 이후에는 해미래 궤적이 정상으로 돌아왔다.

ROV tracks for hydrothermal vents on Archaean vent site in the southern Mariana Trough.
탐사 시작 지점에는 퇴적물이 얇게 덥힌 화산암 구조가 관측됐으며, 지각 확장에 따른 변형구조로 보이는 갈라진 틈들이 종종 목격됐다. Fig. 17은 알키안 열수분추공을 수색하며 이동 중에 발견한 지형으로서 지각이 갈라진 모습을 확인할 수 있었다. 이 지역은 삿갓형태의 포케스트 해저화산 지역과는 달리 지각이 갈라지면서 협곡이 만들어진 형태의 지형을 보였다. 열수분출공을 수색하며 이동중에 약 20m 높이 언덕을 수차례 넘었다. 해저면 암반위에는 검회색의 입자들이 쌓여 있었으며, 해수중 부유물이 다량 존재하여 열수활동이 매우 활발함을 알 수 있었다.
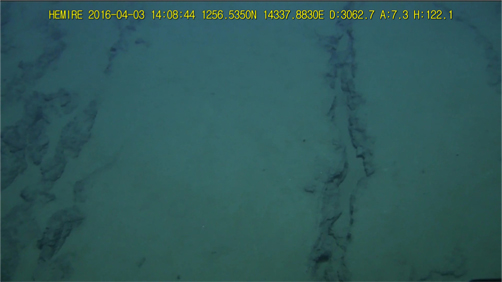
A crack of the rock of the Archaean vents area in the Southern Mariana Trough.
잠수정이 목표지역에 접근함에 따라 열수공 주변에 서식하는 것으로 보이는 생물들이 보이기 시작했고, 황색 혹은 흑색의 퇴적물이 관찰됐다. 이어서 데드 침니(Dead chimney)와 데드 침니가 무너진 것으로 추정되는 바위 조각들이 확인됐다. 녹황색 퇴적물이 흘러내린 흔적이 있는 경사면을 따라 부상하자 검은 연기를 활발하게 분출하는 흑연열수분출공(Black smoker)을 발견했다. Fig. 18은 알키안 지역에서 찾은 흑연열수분출공의 상단, 중앙, 기저부를 나타낸다. 다수의 침니가 다발로 뭉친 흑연 분출공 높이는 약 3~4m로 추정된다. 열수공 중심부는 검은 연기를 맹렬하게 분출하고 있으며, 분출입자가 넓은 영역으로 확산되는 것을 확인했다. 탐사를 종료하고 해미래가 수상으로 부상할 때 약 150m 이상 고도까지 상승한 후에도 검은 연기가 관측됐다. 해미래는 열수분출공 주위를 상하-좌우로 이동하며 영상으로 기록했으며, 열수공 서식 생명체, 지질 및 퇴적물에 대한 영상자료를 취득했다. 알키안 열수분출공 해역도 가파른 경사면이 불규칙적으로 존재해 고도변화가 심한 지역이므로, 고도신호 및 속도신호 계측은 측정 불가한 경우가 포케스트 지역에서와 유사한 수준으로 발생했다. 알키안 열수분출공 탐사에서는 별도의 샘플링 작업을 수행하지 않았다.
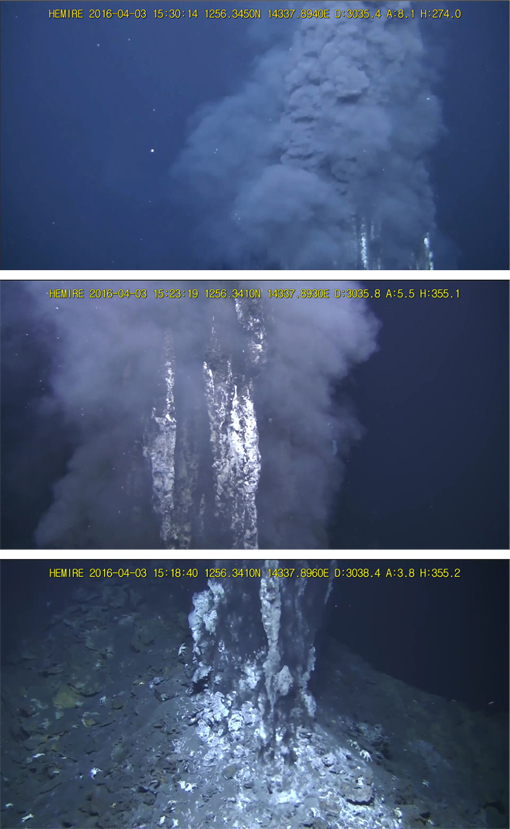
A black smoker in the Archaean vents.
4. 결 론
본 논문은 심해무인잠수정 해미래를 이용한 남마리아나 아크 해저화산과 열수분출공 탐사에 관한 것이다. 탐사는 1,500m 수심의 포케스트 해저화산과 3,000m 수심의 후열도 확장대 알키안 열수해역에서 수행됐다. 이번 탐사를 통하여, 지형 변화가 심한 해저화산 지역에서 열수분출공을 수색하고, 침전물 포집장치와 미끼어망을 설치하고 회수하는 임무 등을 성공적으로 수행함으로써 해미래의 운항제어 및 탐사성능을 입증했다. 또한 열수측정을 위한 고온센서를 개발했고, HD 카메라를 3채널로 확대하여 해미래를 이용한 심해탐사를 효과적으로 수행할 수 있는 기반을 만들었다. 다수의 HD 카메라를 각각 조종하여 해저환경을 모니터링하고, 다각도에서 수중작업 상황을 입체적으로 감시함으로써 효율적인 탐사가 이루어졌다. 해미래의 USBL 위치정밀도는 1,500m 수심에서 약 4.5m 표준편차를 보였다. DVL 신호를 보조센서로 이용하는 해미래 복합항법시스템은 드리프트하는 특성이 있으므로, 이번 탐사에서 주기적으로 또는 USBL과 항법시스템의 상대위치오차가 20m를 초과하는 경우에 USBL 신호로 항법시스템의 위치를 리셋했다. 향후 USBL 신호를 항법시스템에 융합하여 안정한 연속 위치정보를 제공하는 복합항법 기술개발이 필요하다. 해미래를 이용한 첫 심해열수 탐사를 통하여 두 지역에서 서로 다른 열수분출공에 대한 영상자료를 얻었고, 열수생태계 정밀관찰, 생물·광물·퇴적물·해수 시료 취득 등 다양한 성과를 올렸다. 이번 탐사는 우리나라 잠수정과 연구조사선으로 우리나라 과학자와 공학자가 협동하여 열수분출공을 성공적으로 탐사했다는 데에 그 의의가 있다. 앞으로 해미래의 활용 기회가 확대될 것으로 예상되며, 이에 대비해 운용전담인력 확보와 유지관리 인프라의 조기 구축이 필요하다. 또한 다양한 심해탐사 요구에 대응하는 기능확장과 온누리호·이사부호 등 연구선 특성에 따른 특화된 운용방안이 개발되어야 한다.
Notes
It is noted that this paper is revised edition based on the proceedings of the Korean Marine Robot Technology Society 2016 spring conference
Acknowledgements
본 논문은 해양수산부에서 지원하는 “심해 유무인 잠수정 기술개발 및 운용인프라 구축 - 기술개발” 과제로 수행된 연구결과의 일부임을 밝히며 연구비 지원에 감사드립니다. 또한 해미래의 태평양 열수해역 탐사를 위해 DP 미장착 연구선인 온누리호의 위치를 수동으로 제어한 온누리호 강선규 선장을 비롯한 승무원들께 감사드립니다.
References
Baek, S., Kim, B.H., Baek, H., Lee, P.M., Jun, B.H., 2014. Improvement of Video and Communication System for a Deep-sea ROV Hemire using Ethernet Fiber Optic Converter. Proceedings of the Fall Conference of the Korea Ocean Engineering Society, 454-457.
Baek S., Kim B.H., Baek H., Lee P.M., Jun B.H.. Improvement of Video and Communication System for a Deep-sea ROV Hemire using Ethernet Fiber Optic Converter In : Proceedings of the Fall Conference of the Korea Ocean Engineering Society; 2014. p. 454–457.Baek, S., Lee, P.M., Kim B.H., Baek, H., 2015. Operation of Video System for a Deep-sea ROV, Hemire. Proceedings of the Korean Association of Ocean Science and Technology Societies (KAOSTS) Conference, 391-394.
Baek S., Lee P.M., Kim B.H., Baek H.. Operation of Video System for a Deep-sea ROV, Hemire In : Proceedings of the Korean Association of Ocean Science and Technology Societies (KAOSTS) Conference; 2015. p. 391–394.Baker, E.T., Massoth, G.J., Nakamura, K.I., Embley, R.W., de Ronde, C.E.J., Arculus, R.J., 2005. Hydrothermal Activity on Near-Arc Sections of Back-Arc Ridges: Results from the Mariana Trough and Lau Basin. Geochemistry Geophysics Geosystems, Vol 6, No. 9, 1-14.
Baker E.T., Massoth G.J., Nakamura K.I., Embley R.W., de Ronde C.E.J., Arculus R.J.. Hydrothermal Activity on Near-Arc Sections of Back-Arc Ridges: Results from the Mariana Trough and Lau Basin. Geochemistry Geophysics Geosystems 2005;6(9):1–14.Embley, R.W., 2006. Submarine Ring of Fire 2006 : Mariana Arc Submarine Volcanoes. R/V Melville Cruise Report MGLN02MV, April 18 - May 13.
Embley R.W.. Submarine Ring of Fire 2006 : Mariana Arc Submarine Volcanoes. R/V Melville Cruise Report MGLN02MV, April 18 - May 13 2006.Embley, R.W., Baker, E.T., Butterfield, D.A., Chadwick Jr., W.W., Lupton, J.E., Resing, J.A., de Ronde, C.E.J., Nakamura, K.I., Tunnicliffe, V., Dower, J.F., Merle, S.G., 2007. Exploring the Submarine Ring of Fire, Mariana Arc - Western Pacific. Oceanography, 20(4), 68-79.
Embley R.W., Baker E.T., Butterfield D.A., Chadwick W.W. Jr., Lupton J.E., Resing J.A., de Ronde C.E.J., Nakamura K.I., Tunnicliffe V., Dower J.F., Merle S.G.. Exploring the Submarine Ring of Fire, Mariana Arc - Western Pacific. Oceanography 2007;20(4):68–79. 10.5670/oceanog.2007.07.Embley, R.W., Baker, E.T., Chadwick, W.W., Lupton, Jr., J.E., Resing, J.A., Massoth, G.J., Nakamura, K., 2004. Explorations of Mariana Arc Volcanoes Reveal New Hydrothermal Systems. Eos, 85(4), 37-44.
Embley R.W., Baker E.T., Chadwick W.W., Lupton J.E. Jr., Resing J.A., Massoth G.J., Nakamura K.. Explorations of Mariana Arc Volcanoes Reveal New Hydrothermal Systems. Eos 2004;85(4):37–44. 10.1029/2004EO040001.Kim, B.H., Baek, H., Shim, H., Baek, S., Lee, P.M., Park, J.Y., Jun, B.H., Jeong, W.Y., Kang, H., Kim, W.S. 2015a. Seabed Exploration of the East Sea using a Deep-sea ROV, Hemire. Proceedings of the Fall Conference of the Korea Ocean Engineering Society, 446-449.
Kim B.H., Baek H., Shim H., Baek S., Lee P.M., Park J.Y., Jun B.H., Jeong W.Y., Kang H., Kim W.S.. Seabed Exploration of the East Sea using a Deep-sea ROV, Hemire In : Proceedings of the Fall Conference of the Korea Ocean Engineering Society; 2015a. p. 446–449.Kim, B.H., Lee, G.M., Baek, H., Lee, P.M., Jun, B.H., 2014. Improvement of Operating Software for a Deep-sea ROV Hemire. Proceedings of the Fall Conference of the Korea Ocean Engineering Society, 434-437.
Kim B.H., Lee G.M., Baek H., Lee P.M., Jun B.H.. Improvement of Operating Software for a Deep-sea ROV Hemire In : Proceedings of the Fall Conference of the Korea Ocean Engineering Society; 2014. p. 434–437.Kim, B.H., Lee, P.M., Baek, H., Baek, S., 2015b. Device Scalability of a Deep-sea ROV, Hemire. Proceedings of the Korean Association of Ocean Science and Technology Societies (KAOSTS) Conference, 347-350.
Kim B.H., Lee P.M., Baek H., Baek S.. Device Scalability of a Deep-sea ROV, Hemire In : Proceedings of the Korean Association of Ocean Science and Technology Societies (KAOSTS) Conference; 2015b. p. 347–350.Lee, P., Jun, B., Kim, K., Choi, H., Li, J., Lee, C., Ryu, S., Baek, H., Hong, S., Lim, Y., Kim., D., Cho, S., Park, D., Gu, B., Lee, J., Jung, H., Yoon, S., Park, C., Choi, M., Seo, Y., 2007. Sea-trial and Experimental Results of the Deep-sea Unmanned Underwater Vehicles, Hemire and Henuvy. Symposium on Underwater Technology, 276-284.
Lee P., Jun B., Kim K., Choi H., Li J., Lee C., Ryu S., Baek H., Hong S., Lim Y., Kim. D., Cho S., Park D., Gu B., Lee J., Jung H., Yoon S., Park C., Choi M., Seo Y.. Sea-trial and Experimental Results of the Deep-sea Unmanned Underwater Vehicles, Hemire and Henuvy In : Symposium on Underwater Technology; 2007. p. 276–284.Lee, P.M., 2007. Development of an Advanced Deep-sea Unmanned Underwater Vehicle (1st Phase). KORDI Technical Report UCM01240-07035, April 30.
Lee P.M.. Development of an Advanced Deep-sea Unmanned Underwater Vehicle (1st Phase) 2007.Lee, P.M., 2012. Development of an Advanced Deep-sea Unmanned Underwater Vehicle (2nd Phase). KIOST Technical Report UCPMS2060-2378-2, July 31.
Lee P.M.. Development of an Advanced Deep-sea Unmanned Underwater Vehicle (2nd Phase) 2012.