


1. žĄú Ž°†
žč¨ŪēīŽ¨īžĚłžě†žąėž†ē ŪēīŽĮłŽěėŽäĒ 6,000mÍłČ ROV(Remotely operated vehicle)žĚīŽ©į ŪēīžĖĎžąėžāįŽ∂ÄžĚė žßÄžõźžúľŽ°ú žąėŪĖČŽźú žóįÍĶ¨žā¨žóÖžĚė Í≤įÍ≥ľŽ¨ľŽ°úžć® 2007ŽÖĄ ÍįúŽįúŽźźŽč§(Lee., 2007). žĚī žā¨žóÖžĚė 2Žč®Í≥Ą žóįÍĶ¨Ž°ú 2007ŽÖĄŽ∂ÄŪĄį 2012ŽÖĄÍĻĆžßÄ ŪēīŽĮłŽěėŽ•ľ žĚīžö©Ūēú Ūôúžö©žóįÍĶ¨ÍįÄ žßĄŪĖČŽźźŽč§(Lee, 2012). ŪēīŽĮłŽěėŽ•ľ žĚīžö©Ūēú ŽŹôŪēīŪÉźžā¨ŽäĒ žßÄÍłąÍĻĆžßÄ 7ŪöĆ žąėŪĖČŽźźžúľŽ©į, 2015ŽÖĄ 6žõĒžóźŽäĒ 15žĚľ ŪÉźžā¨ žĚľž†ēžúľŽ°ú ŽŹôŪēīžĚė ÍīÄžč¨Ūēīžó≠ 8Íįú žßÄž†źžóź ŽĆÄŪēī žč¨Ūēī Ūáīž†ĀŽ¨ľ žĪĄžßĎ, žÉĚŽ¨ľ žĪĄžßĎ, žč¨ŪēīžÉĚŪÉúÍ≥Ą ÍīÄžįį ŽįŹ žč¨Ūēīž†ÄŪôėÍ≤Ĺ Ž™®ŽčąŪĄįŽßĀ ŽďĪžĚĄ žąėŪĖČŪĖąŽč§(Kim et al., 2015a).
ŪēīŽĮłŽěėŽäĒ 2014ŽÖĄÍ≥ľ 2015ŽÖĄ žĄĪŽä•ÍįúŽüČžĚī žĚīŽ£®žĖīž°ĆŽč§. žēĄŽā†Ž°úÍ∑łŪÉÄžěÖžĚė žėĀžÉĀžčúžä§ŪÖúžĚÄ ŽĒĒžßÄŪĄł ŪÉÄžěÖžĚė HD žĻīŽ©ĒŽĚľ žčúžä§ŪÖúžúľŽ°ú ÍįúžĄ†ŽźźŽč§(Beak et al, 2014; Baek et al., 2015). Íłįž°īžóź ÍįúŽįúžěź žúĄž£ľŽ°ú ŽźėžĖī žěąŽäĒ žā¨žö©žěź žĚłŪĄįŪéėžĚīžä§ ÍĶ¨ž°į(Lee et al., 2007)Ž•ľ žöīžö©žěź ž§Ďžč¨žúľŽ°ú ŽĆÄž≤īŪēėžó¨, ŪĀīŽĚľžĚīžĖłŪäł-žĄúŽ≤Ą ÍĶ¨ž°įŽ°ú ÍįúŪéłŪĖąŽč§(Kim et al., 2014). žč¨ŪēīŪÉźžā¨Ž•ľ žúĄŪēú Žč§žĖĎŪēú žěĄŽ¨ī žöĒÍĶ¨žóź Ūö®Í≥ľž†ĀžúľŽ°ú ŽĆÄžĚĎŪēėÍłį žúĄŪēī ŪēėŽďúžõ®žĖīžôÄ žÜĆŪĒĄŪäłžõ®žĖī žł°Ž©īžóźžĄú žě•žĻė Ūôēžě•žĄĪžĚĄ ŪôēŽ≥īŪēėŽäĒ žóįÍĶ¨ÍįÄ žąėŪĖČŽźźŽč§(Kim et al., 2015b).
2015ŽÖĄ žąėŪĖČŽźú ŽŹôŪēīŪÉźžā¨ŽäĒ ŽĆÄžÉĀŪēīžó≠žĚī žó¨Žü¨ Í≥≥žĚīžßÄŽßĆ žôēŽŹĆžīąŪėĎÍ≥°žĚĄ ž†úžôłŪēú ŽĆÄŽ∂ÄŽ∂ĄžĚė žßÄžó≠žĚī ŪŹČŪŹČŪēėÍ≥† žôĄŽßĆŪēú Í≤Ĺžā¨Ž•ľ ÍįĖŽäĒŽč§. žč¨ŪēīŪôĒžāįÍ≥ľ ÍįôžĚī žßÄŪėēŽ≥ÄŪôĒÍįÄ žč¨Ūēú ÍłČÍ≤Ĺžā¨ žßÄžó≠žĚĄ ŽĆÄžÉĀžúľŽ°ú ŪēīŽĮłŽěėžĚė ŪÉźžā¨ žĄĪŽä•žĚĄ Í≤Äž¶ĚŪē† ŪēĄžöĒÍįÄ žěąžóąÍ≥†, žĚīžóź ŽĒįŽĚľ 2016ŽÖĄžóźŽäĒ žßÄŪėēŽ≥ÄŪôĒÍįÄ žč¨Ūēú Ūēīž†ÄŪôĒžāį ŪÉźžā¨Ž•ľ Í≤įž†ēŪĖąŽč§. ŽĆÄžÉĀ Ūēīžó≠žĚÄ žóįÍĶ¨ÍįÄ ŪôúŽįúŪěą žßĄŪĖČŽźėžóąŽćė Žā®ŽßąŽ¶¨žēĄŽāė žēĄŪĀ¨ Ūēīž†ÄŪôĒžāį žßÄžó≠žúľŽ°ú žĄ†ž†ēŪĖąžúľŽ©į, ŪēīŽĮłŽěėžĚė ŪÉźžā¨žĄĪŽä•žĚĄ Í≤Äž¶ĚŪēėÍ≥† Ž≥īžôĄŪēėÍłį žúĄŪēú Ž™©ž†ĀžúľŽ°ú žóīžąėŽ∂Ąž∂úÍ≥Ķ ž†ēŽįÄŪÉźžā¨ÍįÄ ž∂ĒžßĄŽźźŽč§.
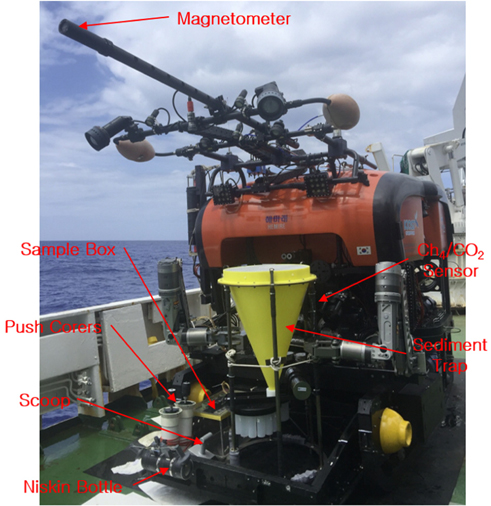
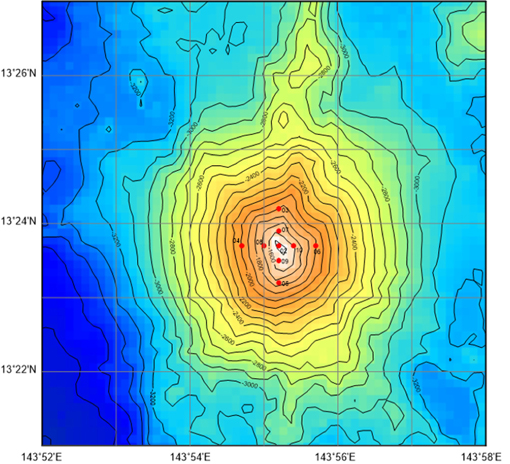
ŪÉźžā¨ŽĆÄžÉĀŪēīžó≠žĚÄ 1,500m žąėžč¨žĚė Forecast Ūēīž†ÄŪôĒžāįÍ≥ľ 3,000m žąėžč¨žĚė Archaean žóīžąėŽ∂Ąž∂úÍ≥Ķ žßÄžó≠žúľŽ°ú žĄ†ž†ēŽźźŽč§. žĚīÍ≥≥žĚÄ žĄúŪÉúŪŹČžĖĎ ŽĮłÍĶ≠Ž†Ļ Íīƞ󟞥ú žĄúž™Ĺ 70-150kmžóź žúĄžĻėŪēú ŽßąŽ¶¨žēĄŽāė žóīŽŹĄ ŽįŹ ŪõĄžóīŽŹĄ Ūôēžě•ŽĆÄ(Fig. 1 žįłž°į)žĚīŽ©į, žóīŽŹĄŪôĒžāįžěĎžö©žóź žĚėŪēī žÉĚžĄĪŽźú žóīžąėÍ≥ĶžĚī žóīžąėŽ•ľ Ž∂Ąž∂úŪēėÍ≥† žěąŽäĒ Í≤ÉžúľŽ°ú Ž≥īÍ≥†ŽźėžĖī žěąŽč§(Embley et al., 2004; Baker et al., 2005; Embley et al., 2007). ŪēīŽĮłŽěėžĚė Ūēīž†ÄŪôĒžāį ŪÉźžā¨žěĎžóÖžĚÄ žóīžąėÍ≥Ķ žąėžÉČ, žėĀžÉĀÍīÄžł° ŽįŹ ž£ľŽ≥ÄŪēīžó≠žóźžĄúžĚė ŪēīžĖĎÍ≥ľŪēô ŽćįžĚīŪĄį ž∑®Žď̞̥ Ž™©ž†ĀžúľŽ°ú ŪēúŽč§. žĚīŽ•ľ žúĄŪēėžó¨ CTD(Conductivity, temperature and depth) žĄľžĄú, CO2-CH4(žĚīžāįŪôĒŪÉĄžÜĆ-Ž©ĒŪÉĄ) žĄľžĄúŽ•ľ Ūôúžö©Ūēú ŪēīžĖĎŽ¨ľŽ¶¨žěźŽ£Ć ŪöćŽďĚ, ŪĎłžčúžĹĒžĖī(Push core), žä§žŅ†ŪĒĄ(Scoop), žĪĄžąėžě•žĻė(Niskin bottle), ŽĮłŽĀľžĖīŽßĚ (bait trap) ŽďĪžĚĄ Ūôúžö©Ūēú žßÄžßą¬∑žÉĚŽ¨ľžčúŽ£Ć ŪöćŽďĚ, žóīžąėÍ≥ĶžúľŽ°úŽ∂ÄŪĄį Ž∂Ąž∂úŽźėŽäĒ žěÖžěźŪĒĆŽü≠žä§ žł°ž†ēžĚĄ žúĄŪēú žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻė(Sediment trap)žĚė žĄ§žĻė¬∑ŪöĆžąė, Ūēīž†ÄŽ©ī Í∑ľž†Ď ž†ēŽįÄ žßÄŪėē žł°ž†ē ŽįŹ Ūēīž†ÄŪôĒžāį ž£ľŽ≥ÄžĚė žßÄžěźÍłį žł°ž†ē žčúŪóė ŽďĪžĚĄ ŪŹ¨Ūē®ŪēúŽč§.

ŽßąŽ¶¨žēĄŽāė Ūēīžó≠ žóīžąėŪÉźžā¨ŽäĒ 2016ŽÖĄ 3žõĒ 23žĚľŽ∂ÄŪĄį 4žõĒ 5žĚľÍĻĆžßÄ 14žĚľ žĚľž†ēžúľŽ°ú žąėŪĖČŽźźÍ≥†, žĚī ŪÉźžā¨Ž•ľ ŪÜĶŪēī žč¨ŪēīŽ¨īžĚłžě†žąėž†ē ŪēīŽĮłŽěėžĚė žóīžąėŽ∂Ąž∂úÍ≥Ķ ŪÉźžā¨ ÍłįŽä•žĚĄ ŪôēžĚłŪē† žąė žěąŽč§. Ž≥ł ŽÖľŽ¨łžĚÄ 2žě•žóź žóīžąėŪÉźžā¨Ž•ľ žúĄŪēú ŪēīŽĮłŽěėžĚė HD žĻīŽ©ĒŽĚľ žčúžä§ŪÖú Ūôēžě•, žóīžąėÍ≥Ąžł°žĄľžĄú ŽįŹ ÍłįŪÉÄ ŪÉźžā¨žě•ŽĻĄ žĚłŪĄįŪéėžĚīžä§žóź ŽĆÄŪēī žĄ§Ž™ÖŪēėÍ≥†, 3žě•žóź žóīžąėŪÉźžā¨Ž•ľ žúĄŪēú žě†žąėž†ē žöīžö© ŪĒĄŽ°úžĄłžä§, žěĄŽ¨īžóź ŽĒįŽ•ł ž†úžĖī ž†ąžį®, ŽćįžĚīŪĄį Ž∂ĄžĄĚ ŽįŹ ŪÉźžā¨Í≤įÍ≥ľŽ•ľ Íłįžą†ŪēėÍ≥†, ŽßąžßÄŽßČ žě•žóź Í≤įŽ°†žĚĄ ž†ēŽ¶¨ŪĖąŽč§.
2. ŪēīŽĮłŽěėžĚė žĄĪŽä•ÍįúŽüČ ŽįŹ žě•ŽĻĄ žĚłŪĄįŪéėžĚīžä§
ŽßąŽ¶¨žēĄŽāė žóīžąėŪēīžó≠ ŪÉźžā¨Ž•ľ žúĄŪēú ŪēīŽĮłŽěė žěĄŽ¨īŽäĒ Žč§žĚĆÍ≥ľ ÍįôŽč§.
žóīžąėŽ∂Ąž∂úÍ≥Ķ žąėžÉČ, žėĀžÉĀžěźŽ£Ć ž∑®ŽďĚ ŽįŹ ž£ľŽ≥Ä Ūēīž†ÄÍīÄžįį
žóīžąėžÉĚŽ¨ľ žĪĄžßϞ̥ žúĄŪēú ŽĮłŽĀľžĖīŽßĚ žĄ§žĻė ŽįŹ ŪöĆžąė
žóīžąėŽ∂Ąž∂úžěÖžěź ŪŹ¨žßϞ̥ žúĄŪēú žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻė žĄ§žĻė ŽįŹ ŪöĆžąė
žóīžąėŽ∂Ąž∂úÍ≥Ķ ž£ľŽ≥Ä Ūáīž†ĀŽ¨ľ žÉėŪĒĆŽßĀ(ŪĎłžčúžĹĒžĖīŽßĀ, žä§žŅ†ŪēĎ)
žóīžąėŽ∂Ąž∂úÍ≥Ķ žąėžė®žł°ž†ē, Ūēīžąė žĪĄžąė ŽįŹ žēĒžĄĚ žÉėŪĒĆŽßĀ
Ūēīž†ÄŪôĒžāį ž£ľŽ≥Ä žßÄžěźÍłį žł°ž†ē, ž†ēŽįÄ žßÄŪėēžł°ž†ē
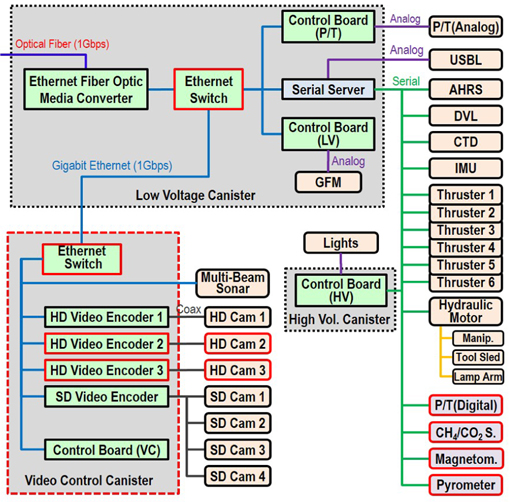
žĚī žěĄŽ¨ī žąėŪĖȞ̥ žúĄŪēī HD žĻīŽ©ĒŽĚľ žĪĄŽĄź Ūôēžě•Í≥ľ Ūē®ÍĽė žĚīŽćĒŽĄ∑ ÍłįŽįėžĚė Í≥Ąžł°žě•žĻė žĚłŪĄįŪéėžĚīžä§Ž•ľ žúĄŪēėžó¨ ŪÜĶžč†Í≥ĄŪÜĶžĚĄ ÍįúžĄ†ŪĖąŽč§.
ŪĆƞ̾ŽüŅžĚī žěĎžóÖŪēėŽäĒ ž§ĎžóźŽŹĄ Í≥ľŪēôžěźÍįÄ žěźžú†Ž°≠Í≤Ć Ūēīž†ÄŽ•ľ ÍīÄžł°ŪēėŽäĒ Í≤ÉÍ≥ľ žąėž§ĎžěĎžóÖ Ūö®žú®žĄĪ ž†úÍ≥†Ž•ľ žúĄŪēī HD žĻīŽ©ĒŽĚľ 2ŽĆÄŽ•ľ ž∂ĒÍįÄ ž†úžěĎŪĖąŽč§. ž†úžěĎŽźú žĻīŽ©ĒŽĚľŽäĒ HD žĻľŽĚľ žĻīŽ©ĒŽĚľ Ž™®ŽďąžĚĄ ŽāīžēēŪēėžöįžßēžóź ŪÉĎžě¨ŪēėÍ≥†, žĚīŽćĒŽĄ∑ ÍīĎŽ≥ÄŪôėÍłįŽ•ľ žĚīžö©Ūēī žĄ†žÉĀž†úžĖīžč§Í≥ľ ŪÜĶžč†ŪēúŽč§(Beak et al, 2014; Baek et al., 2015). žĻīŽ©ĒŽĚľ ž†Ąžö© Žāīžēēžö©ÍłįŽ•ľ Ž≥ĄŽŹĄ ž†úžěĎŪēī Ž™®Žď† žĻīŽ©ĒŽĚľ žč†ŪėłŽäĒ ž†Ąžö©žö©ÍłįžôÄ Žāīžēēžö©ÍłįžĚė žĚīŽćĒŽĄ∑ žä§žúĄžĻėŽ•ľ ŪÜĶŪēī žĄ†žÉĀžúľŽ°ú ž†ĄžÜ°ŽźúŽč§. Fig. 2ŽäĒ žĻīŽ©ĒŽĚľ žčúžä§ŪÖúžĚė ŽĄ§ŪäłžõĆŪĀ¨ žóįŽŹôžĚĄ ŽāėŪÉÄŽāłŽč§. ŪĆƞ̾ŽüŅÍ≥ľ Í≥ľŪēôžěź žĻīŽ©ĒŽĚľ(HD Cam 1, 2)ŽäĒ ÍįĀÍįĀ P/T(Ūƨ/ŪčłŪäł)žě•žĻėŽ°ú ž°įž†ēŪē† žąė žěąÍ≥†, žąėžßĀžĻīŽ©ĒŽĚľ(HD Cam 3)ŽäĒ Žě®ŪĒĄŪĒĄŽ†ąžěĄžóź Í≥†ž†ēŪĖąŽč§.
Fig. 2
Network and interface of the equipment of Hemire for the hydrothermal vent exploration (the red blocks are added).
300‚ĄÉ žĚīžÉĀžĚė žóīžąė žė®ŽŹĄžł°ž†ēžĚĄ žúĄŪēīžĄúŽäĒ, Í≥†žė®žĄľžĄúŽ•ľ Ž°úŽīáŪĆĒŽ°ú žßĎžĖī 2m žĚīžÉĀ ŽĖ®žĖīžßĄ ÍĪįŽ¶¨žĚė žóīžąė žė®ŽŹĄŽ•ľ žł°ž†ēŪē† žąė žěąžĖīžēľ ŪēúŽč§. Ž≥ł ŽÖľŽ¨łžóźžĄúŽäĒ žĚīŽ•ľ žúĄŪēėžó¨ ž†Ąžö© Í≥†žė®žĄľžĄúŽ•ľ ÍįúŽįúŪĖąŽč§. žė®ŽŹĄžĄľžĄúŽäĒ ŽįĪÍłą RTD(Resistance temperature detector) ŪĒĄŽ°úŽłĆžôÄ Ž≥ÄŪôėÍłį(Muesen Technik, HART MTS885; Ž≤ĒžúĄ: -200~600‚ĄÉ)Ž•ľ žĚīžö©ŪēėÍ≥† ŽŹÖŽ¶Ĺ Žāīžēēžö©Íłįžóź ŪÜĶžč†Ž≥ÄŪôėÍłįŽ•ľ Žāīžě•Ūēī ž†úžěĎŪĖąŽč§. žä§ŪĒĄŽßĀ ŪėēŪÉúŽ°ú ž†úžěĎŽźú žąėž§Ď žľÄžĚīŽłĒžĚī Í≤ĹŪÜĶŪėē Ž≥īŪėłÍīÄžóź Í≥†Ž¨īž§ĄŽ°ú ŽčĻÍ≤®Žď§žĖī ÍįÄŽäĒ ÍĶ¨ž°įžĚė žóīžąėžė®ŽŹĄžł°ž†ēžö© žĄľžĄúŽ•ľ ÍįúŽįúŪĖąŽč§. Fig. 3žĚÄ ŪēīŽĮłŽěė Ūąīžä¨Ž†ąŽďú(Tool-sled)žóź žĄ§žĻėŽźú Í≥†žė®žĄľžĄúŽ•ľ Ž≥īžĚłŽč§.

žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻėŽäĒ ŪēúÍĶ≠ŪēīžĖĎÍ≥ľŪēôÍłįžą†žõźžĚī Ž≥īžú†Ūēú žčúÍ≥Ąžóī Ūáīž†ĀŽ¨ľ ŪŹ¨žßĎžě•žĻė(McLane Parflux Mark8‚Äď3; ŽÜížĚī 116cm, ŪŹ≠ 66cm, ŪŹ¨žßĎŪĎúŽ©īž†Ā 0.25m2, ž§ĎŽüČ Í≥ĶÍłįž§Ď 42kg, žąėž§Ď 18kg)Ž•ľ žĚīžö©ŪĖąŽč§. žĚī ŪŹ¨žßĎžě•žĻėŽäĒ ŪēīŽ•ėžóź ŽįÄŽ¶¨ÍĪįŽāė žďįŽü¨žßÄŽäĒ Í≤ɞ̥ Žį©žßÄŪēėÍłį žúĄŪēėžó¨ ŽįúŽĚľžä§Ūäł žõ®žĚīŪ䳎•ľ ŪēėŽ∂Ä ŪĒĄŽ†ąžěĄžóź Ž∂Äžį©ŪĖąÍ≥†, ž§ĎÍįĄžóź žÜźžě°žĚīŽ•ľ žě•žį©Ūēī Í≥ĶÍłįž§Ď ž§ĎŽüČžĚī žēĹ 60kg(žąėž§Ď žēĹ 33kg)žóź žĚīŽ•łŽč§. Ūēīž†Ä žĄ§žĻė¬∑ŪöĆžąė Žį©Ž≤ēžĚÄ ŪŹ¨žßĎžě•žĻėŽ•ľ ŪēīŽĮłŽěė Ūąīžä¨Ž†ąŽďúžóź ž†Āžě¨Ūēī Ūēīž†ÄŽ°ú Ž≥īŽāīÍ≥† Ž°úŽīáŪĆĒžĚĄ žĚīžö©Ūēī žßÄž†ēžúĄžĻėžóź žĄ§žĻė¬∑ŪöĆžąėŪēėŽäĒ Í≤ÉžúľŽ°ú ž†ēŪĖąŽč§. Fig. 4ŽäĒ žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻė žĄ§žĻėŽ•ľ žúĄŪēú žě†Ūē≠žĚł Dive-04žĚė Í≥Ąžł°¬∑žÉėŪĒĆŽßĀžě•ŽĻĄ ŪÉϞ쨞ÉĀŪÉúŽ•ľ Ž≥īžĚłŽč§.
Ūēīž†ÄŪôĒžāį žßÄžó≠žĚė žßÄžěźÍłį Í≥Ąžł°žĚĄ žúĄŪēėžó¨ ŪēīŽĮłŽěėžóź žěźŽ†•Í≥ĄŽ•ľ ž∂ĒÍįÄ žě•žį©ŪĖąŽč§. žßÄžěźÍłį žĄľžĄúŽäĒ 3žĄĪŽ∂Ą ŽĒĒžßÄŪĄł žěźŽ†•Í≥Ą(Honeywell HMR2300; ¬Ī1G Ž≤ĒžúĄžóźžĄú ž†ēŪôēŽŹĄ <0.5 FS, ¬Ī2G Ž≤ĒžúĄžóźžĄú ŪēīžÉĀŽŹĄ 70őľG, 10~154 sps, RS232)žĚīŽč§. žěźŽ†•Í≥ĄŽäĒ žě†žąėž†ē žěźž≤īžĚė žěźÍłįžě• žėĀŪĖ•žĚĄ žĶúžÜĆŪôĒŪēėŽŹĄŽ°Ě Íłī ŽīȞ̥ Žě®ŪĒĄ ŪĒĄŽ†ąžěĄžóź Í≥†ž†ēžčúŪā§Í≥† ŽīČ žĘÖŽč®žóź žĄ§žĻėŪĖąŽč§. žěźŽ†•Í≥ĄŽäĒ ŪēīŽĮłŽěė žÉĀŽč®žúľŽ°úŽ∂ÄŪĄį 1.63m ŽŹĆž∂úŽźźžúľŽ©į, Fig. 4žóźžĄú žĄ§žĻė žÉĀŪÉúŽ•ľ Ž≥ľ žąė žěąŽč§.
Ž∂ąÍ∑úžĻôŪēú žßÄŪėēŪäĻžĄĪžĚĄ ÍįĖŽäĒ Ūēīž†ÄŪôĒžāį žßÄžó≠žóźžĄú ž†ēŽįÄžěĎžó̥֞ žúĄŪēī M3 žÜĆŽāė(Kongsberg Mesotech; Ž©ÄŪčįŽĻĒžÜĆŽāė(MBS, Multi-Beam Sonar) Ž™®Žďú ŽėźŽäĒ žīąžĚĆŪĆĆžĻīŽ©ĒŽĚľ(AC, Acoustic Camera) Ž™®Žďú žöīžö©)Ž•ľ ž∂ĒÍįÄ ŪÉĎžě¨ŪĖąŽč§. M3 žÜĆŽāėŽäĒ ŽĻĄŽĒĒžė§ ž†úžĖī žļźŽčąžä§ŪĄįŽ•ľ ŪÜĶŪēī žóįÍ≤įŽźėžĖī žĚīŽćĒŽĄ∑žúľŽ°ú ŪÜĶžč†ŽźėŽ©į, Fig. 2žóź žóįŽŹô ž≤īÍ≥ĄÍįÄ ŽāėŪÉÄŽāė žěąŽč§. M3 žÜĆŽāėŽäĒ MBS Ž™®ŽďúŽ°ú žöīžö©ŽźėŽ©į(Dive-01~05), žßÄŪėēŽ≥ÄŪôĒÍįÄ žč¨Ūēī Í≥≥žóź žĄ§žĻėŽźú ŽĮłŽĀľžĖīŽßĚ ŪöĆžąėžčú žěĎžó̥֞ žßÄžõźŪēėÍĪįŽāė ŪĚĎžóįžóīžąė žąėžÉČžčú Ž≥īž°įž†ēŽ≥īŽ°ú žā¨žö©Ūē† Í≤ĹžöįžóźŽäĒ AC Ž™®ŽďúŽ°ú žöīžö©ŽźźŽč§(Dive-06~09).
3. Žā®ŽßąŽ¶¨žēĄŽāė Ūēīž†ÄŪôĒžāį ŽįŹ Ūôēžě•ŽĆÄ žóīžąė ŪÉźžā¨
ŽßąŽ¶¨žēĄŽāė Ūēīž†ÄŪôĒžāį ŽįŹ ŪõĄžóīŽŹĄ Ūôēžě•ŽĆÄ ŪÉźžā¨Ž•ľ žúĄŪēú žßÄžó≠žĚÄ ŽčĻžīą ŪŹ¨žľÄžä§Ūäł(Forecast) Ūēīž†ÄŪôĒžāį, Seamount X, Žā®ŽßąŽ¶¨žēĄŽāė ŪõĄžóīŽŹĄ Ūôēžě•ŽĆÄ(Archaean vent site) ŽďĪ žóīžąėŪôúŽŹôžĚī žēĆŽ†§žßĄ žĄł Í≥≥žĚīžóąžúľŽāė, ŪÉźžā¨Ž•ľ žßĄŪĖČŪēėŽ©īžĄú ŽĎź žßÄžó≠žóź žßĎž§ĎŪĖąŽč§.
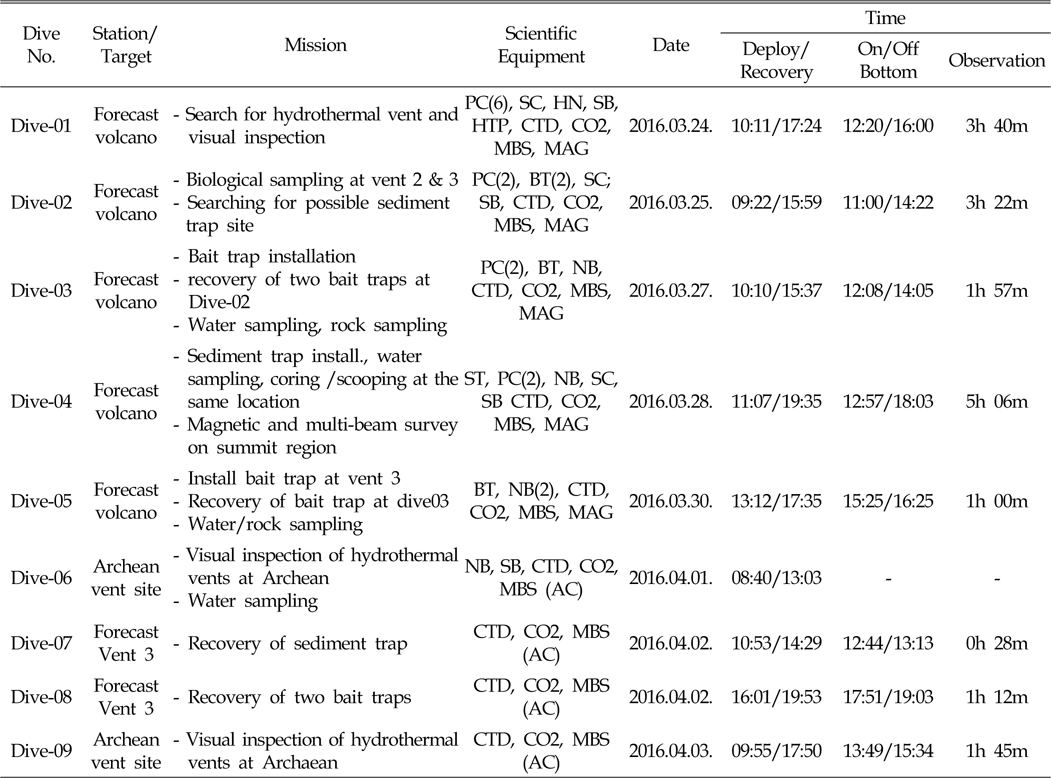
ŪēīŽĮłŽěėŽäĒ Í≥ľŪēôžě†Ūē≠ 9ŪöĆ ŽįŹ Íłįžą†žě†Ūē≠ 1ŪöĆŽ•ľ ŪŹ¨Ūē®Ūēėžó¨ žīĚ 10ŪöĆ žě†Ūē≠ŪĖąŽč§. ŪÉźžā¨ žßĄŪĖČž§Ď ÍīĞ訞ā¨Ūē≠žĚī Ž≥ÄÍ≤ĹŽź®žóź ŽĒįŽĚľ žě†Ūē≠ žěĄŽ¨īÍįÄ žąėž†ēŽźźžúľŽ©į, žě†Ūē≠ Žāīžö©Í≥ľ žĚľž†ēžĚÄ ŪēīžÉĀž°įÍĪīÍ≥ľ žě†žąėž†ē žÉĀŪÉúžóź ŽĒįŽĚľ žąėžčúŽ°ú ž°įž†ēŽźźŽč§. ŽßąŽ¶¨žēĄŽāė žóīžąėžßÄžó≠ ŪÉźžā¨Ž•ľ žúĄŪēú ŪēīŽĮłŽěėžĚė žě†Ūē≠ÍłįŽ°ĚžĚĄ Table 1žóź žöĒžēĹŪĖąŽč§.
3.1 ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāį žóīžąėŽ∂Ąž∂úÍ≥Ķ ŪÉźžā¨
ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāįžĚÄ ŽßąŽ¶¨žēĄŽāė Ūēīž†ÄŪôĒžāįŽĆÄ Žā®Žč®žóź žúĄžĻėŪēėÍ≥†, žąėžč¨ 1450mžĚł ž†ēžÉĀŽ∂ÄžóźŽäĒ 5ÍįúžĚė žóīžąėŽ∂Ąž∂úÍ≥ĶžĚī Ž≥īÍ≥†ŽźėžĖī žěąŽč§(Embley, 2006). žĚīž§ĎžóźžĄú 3Íįú žóīžąėŽ∂Ąž∂úÍ≥ĶžĚĄ ž†ēžÉĀŽ∂Ğ󟞥ú žįĺžēĄ ŪÉźžā¨Ž•ľ žąėŪĖČŪĖąÍ≥†, 3Íįú žóīžąėŽ∂Ąž∂úÍ≥ĶžĚė žúĄžĻėŽäĒ Žč§žĚĆÍ≥ľ ÍįôŽč§.
ŪÉźžā¨žóź žē장ú žė®ŽąĄŽ¶¨Ūėł Ž©ÄŪčįŽĻĒžÜĆŽāėŽ•ľ žĚīžö©Ūēėžó¨ ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāį žßÄŪėēŽŹĄŽ•ľ ž†úžěĎŪĖąÍ≥†(Fig. 5 žįłž°į), žĚīŽ•ľ Íłįž§ÄžúľŽ°ú Ž™®žĄ†, ŪēīŽĮłŽěė, ŪēīŽąĄŽĻĄ ŽĒĒŪĒĄŽ†ąžĄú(Lee, 2007) ÍįĀÍįĀžĚė žąėž§ĎžúĄžĻėŽ•ľ Ž™®ŽčąŪĄįŽßĀŪēėŽ©į ŪēīŽĮłŽěė žčúžä§ŪÖúžĚĄ ŪÜĶž†úŪĖąŽč§. Ž™©ŪĎúžąėžč¨žĚī žēĹ 1,500mžĚīŽĮÄŽ°ú ŪēīŽĮłŽěė žě†Ūē≠ žÜ掏ĄŽ•ľ Í≥†Ž†§Ūēėžó¨ Ž™©ŪĎúž†źžúľŽ°úŽ∂ÄŪĄį žēĹ 1km ŽĖ®žĖīžßĄ žúĄžĻėžóźžĄú žě†žąėž†ēžĚĄ žßĄžąėžčúŪā§Í≥†, Ž™©ŪĎúž†ź Žį©ŪĖ•žúľŽ°ú 0.5ŽÖłŪäł(0.257m/s) žĚīŪēė žĄ†žÜćžúľŽ°ú žėąžĚłŪēėŽ©į žě†Ūē≠ŪĖąŽč§. žě†Ūē≠žčúžóź žúąžĻėžľÄžĚīŽłĒ ŪéėžĚīžēĄžõÉ(Pay-out) žÜ掏ĄÍįÄ 20m/minžĚĄ ŽĄėŽäĒ Í≤Ĺžöįžóź ŪēīŽąĄŽĻĄ žÉĀŪēėžöīŽŹôžĚī Í≥ľŽŹĄŪēīž†ł AŪĒĄŽ†ąžěĄžĚė žľÄžĚīŽłĒ žčúŽłĆ(Sheave)ÍįÄ ž†źŪēĎŪēėŽäĒ ŪėĄžÉĀžĚī žĘÖžĘÖ ŽįúžÉĚŪĖąŽč§. ŽĒįŽĚľžĄú žě†Ūē≠žÜ掏ĄŽäĒ 20m/minžĚĄ ŽĄėžßÄ žēäÍ≤Ć žöīžö©ŪĖąŽč§. ŪēúŪéł Ž∂ÄžÉĀžÜ掏ĄŽäĒ žě†Ūē≠žÜ掏Ą Ž≥īŽč§ ŽÜížēĄŽŹĄ ž†źŪēĎŪėĄžÉĀžĚī žóÜžúľŽĮÄŽ°ú žúąžĻėžľÄžĚīŽłĒ ŪôĞ̳(Haul-in) žÜ掏ĄŽäĒ 20~40m/min Ž≤ĒžúĄžóźžĄú žú†žßÄŪĖąŽč§.
ŪēīŽĮłŽěėÍįÄ Í≥†ŽŹĄ 50mžóź ŽŹĄŽč¨ŪēėŽ©ī ŪÉźžā¨Ž™®ŽďúŽ°ú ž†ĄŪôėŪĖąÍ≥†, Ž™©ŪĎúž†ź 200m ž†ĄŽį© žßÄž†źŽ∂ÄŪĄį ŪēīŽĮłŽěė Í≥†ŽŹĄŽ•ľ 10m žĚīŽāīŽ°ú Žāģž∂ĒžĖī ŪŹ¨žľÄžä§Ūäł ŪôĒžāįžĚĄ ÍīÄžł°ŪĖąŽč§. žúĄžĻėžł°ž†ēžĚÄ USBL(Ultra short baseline)Í≥ľ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚĄ žĚīžö©ŪĖąŽč§. USBLžĚÄ Ž¶¨žä§ŪŹįŽćĒ Ž™®ŽďúŽ•ľ žĚīžö©ŪĖąžúľŽ©į, žč†Ūėłžąėžč† žÉĀŪÉúžóź ŽĒįŽĚľ Ū䳎ěúžä§ŪŹįŽćĒ Ž™®ŽďúŽ°ú ž†ĄŪôėŪēėžó¨ žöīžö©ŪĖąŽč§. 4žīą ŽėźŽäĒ 6žīą ŽßąŽč§ žúĄžĻėž†ēŽ≥īÍįÄ žóÖŽćįžĚīŪäł ŽźźŽč§. ŪēīŽĮłŽěė ŪÜĶŪē©ž†úžĖīŽäĒ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖú ž†ēŽ≥īŽ•ľ žā¨žö©ŪĖąÍ≥†, USBLÍ≥ľžĚė žúĄžĻė ŽįĒžĚīžĖīžä§ žė§žį®ÍįÄ žĽ§žßÄŽ©ī USBL žč†ŪėłŽ°ú žúĄžĻėŽ•ľ Ž≥īž†ēŪēėŽäĒ Žį©žčĚžúľŽ°ú žöīžö©ŪĖąŽč§. HD žĻīŽ©ĒŽĚľ žėĀžÉĀžóźŽäĒ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖú žúĄžĻėž†ēŽ≥īÍįÄ ÍłįŽ°ĚŽźúŽč§.
Fig. 6žĚÄ Dive-01žóźžĄú USBLŽ°ú Í≥Ąžł°Žźú ŪēīŽĮłŽěė ŽįŹ ŪēīŽąĄŽĻĄ ŽĒĒŪĒĄŽ†ąžĄúžĚė X-YŪŹČŽ©ī Í∂§ž†ĀžĚĄ ŽāėŪÉÄŽāłŽč§. Í∑łŽ¶ľžĚÄ USBL žēĄžõÉŽĚľžĚīžĖīŽ•ľ ž†úÍĪįŪēú žÉĀŪÉúžĚīŽāė, žēĄžõÉŽĚľžĚīžĖīŽäĒ Dive-01 ŪÉźžā¨ 3žčúÍįĄ 40Ž∂Ą ŽŹôžēą 6ŪöĆ ŽįúžÉĚŪē† ž†ēŽŹĄŽ°ú ÍĪįžĚė žĚľžĖīŽāėžßÄ žēäžēėÍ≥†, žúĄžĻėžė§žį®ŽäĒ ŪĎúž§ÄŪéłžį®Ž°ú 4~5mžĚīŽč§. Í∑łŽ¶ľžóźžĄú USBL žč†ŪėłžĚė ŽĻąŽŹĄÍįÄ ŽÜížĚÄ žßÄžó≠žĚÄ žóīžąė Ž∂Ąž∂úÍ≥ĶžĚī ŽįúÍ≤¨Žźú Í≥≥žúľŽ°úžć® ŪēīŽĮłŽěėÍįÄ ž≤īŽ•ėŪēėŽäĒ žčúÍįĄžĚī Íłī žßÄž†źžĚīŽč§.

ŪÉźžā¨ ž†ĄŽįėÍłįžóź ROVÍįÄ Ž™©ŪĎúžßÄž†źžóź ŽŹĄŽč¨ŪĖąžúľŽāė, Ž™®žĄ†žĚī Ž™©ŪĎúÍ∂§ž†Ā ž∂Ēž†Āžóź žĖīŽ†§žõÄžĚī žěąžĖī ŪíćŪĖ•žĚĄ Í≥†Ž†§Ūēėžó¨ Ž™®žĄ† Žį©ŪĖ•žĚĄ Ž≥ÄÍ≤ĹŪĖąŽč§. Ž™®žĄ†žĚī Ž≥ÄžĻ®ŪēėŽ©īžĄú ŪēīŽąĄŽĻĄÍįÄ žĄúž™ĹžúľŽ°ú ŽďúŽ¶¨ŪĒĄŪäłŪĖąÍ≥†, ROVŽäĒ ŪēīŽąĄŽĻĄŽ•ľ ŽĒįŽĚľ žĚīŽŹôŪēėŽ©į ŽĆÄÍłįŪĖąžóąŽč§. Í∑łŽ¶ľžóźžĄú žÉĀŽč® žĘĆžł° ŪÉÄžõźŪėē Í∂§ž†ĀžĚÄ žóīžąėŽ∂Ąž∂úÍ≥ĶžóźžĄú žĄúž™ĹžúľŽ°ú Ž≤óžĖīŽāú žě†žąėž†ē žúĄžĻėŽ•ľ ŽāėŽāėŽāłŽč§. ŪÉźžā¨ ŪõĄŽįėÍłįžóź žě†žąėž†ēžĚÄ Žā®ž™ĹŽį©ŪĖ•žúľŽ°ú žēĹ 200m ŽāīŽ†§žė§Ž©īžĄú ŪŹ¨žľÄžä§Ūäł ž†ēžÉĀŽ∂ÄŽ•ľ ÍīÄžįįŪĖąÍ≥† Žč§žčú Ž∂ĀžÉĀŪēėŽ©į ÍīÄžįįŪĖąŽč§.
Fig. 7žĚÄ Dive-01žóźžĄúžĚė ŪēīŽĮłŽěė žöīŪē≠ž†ēŽ≥ī ŽįŹ Í≥ľŪēôžĄľžĄú Í≥Ąžł° ŽćįžĚīŪĄį žĄłŪ䳎•ľ ŽāėŪÉÄŽāłŽč§. žąėžč¨žč†Ūėł ž§ĎžóźžĄú USBL žąėžč¨žĚÄ Ūēīž†ÄŪÉźžā¨ žčúÍįĄŽŹôžēą 6ŪöĆžĚė žēĄžõÉŽĚľžĚīžĖīÍįÄ žěąžóąžĚƞ̥ žēĆ žąė žěąŽč§. Í≥†ŽŹĄžč†ŪėłŽäĒ ŪĒľŪĀ¨ŪėēŪÉúŽ°ú ‚Äė0‚ÄôžĚė ÍįížĚĄ Ž≥īžĚīŽäĒ Ž∂Äž†ēŪôēŪēú Í≥Ąžł°žĚī žúĄžĻėžóź ŽĒįŽĚľ ŽĻąŽ≤ąŪēėÍ≤Ć ŽįúžÉĚŪĖąŽč§. Ūēīž†Ä ž†ēžÉĀŽ∂ÄŽäĒ Í≤Ĺžā¨ŽŹĄÍįÄ Žß§žöį žč¨ŪēėÍ≥† žßÄžó≠žóź ŽĒįŽĚľ žąėžßĀž†ąŽ≤ĹžĚī ž°īžě¨ŪēúŽč§. žĚīŽüį žßÄžó≠žóźžĄúŽäĒ Žįėžā¨ŪĆĆžĚė žėĀŪĖ• ŽįŹ DVL(Doppler velocity log) ŽĻĒ žąėžč†žĚī Ž∂ąÍįÄŽä•Ūēú Í≤ĹžöįÍįÄ ŽįúžÉĚŪēėžó¨ žÜ掏ĄžôÄ Í≥†ŽŹĄ Í≥Ąžł°žĚī Ž∂Äž†ēŪôēŪĖąŽč§. žĚīŽēĆ žĖĽžĖīžßĄ DVL žÜ掏Ąžč†ŪėłŽäĒ žč†ŽĘįŪē† žąė žóÜŽäĒ ÍįížĚīŽ©į, žÜ掏Ąž†ēŽ≥īŽ•ľ žĚīžö©ŪēėŽäĒ žąėž§ĎÍīÄžĄĪŪē≠Ž≤ēžĚÄ žė§žį®ÍįÄ ž†źžį® ŽąĄž†ĀŽźúŽč§. ŽĒįŽĚľžĄú ŪēīŽĮłŽěėŽäĒ ŪÉźžā¨ž§Ď žč¨ŽŹĄž†úžĖīžôÄ Ūó§ŽĒ©ž†úžĖīŽßƞ̥ žĚīžö©ŪĖąÍ≥†, USBLÍ≥ľ ÍīÄžĄĪŪē≠Ž≤ē žė§žį®ÍįÄ 20mžóź žĚīŽ•īÍĪįŽāė ŪēīŽĮłŽěėÍįÄ ž†ēžßÄžÉĀŪÉúžĚľ ŽēĆžóź USBL žč†ŪėłŽ°ú žąėŪŹČŽ©ī žúĄžĻėŽ•ľ Ž¶¨žÖčŪĖąŽč§.
Fig. 7
Hemire status and measurements in Dive-01: (1) depth, altitude, (2) velocities Vx, Vy, Vz, (3) roll, pitch, yaw, (4) CTD (Temp. Cond. Sali.), CO2.

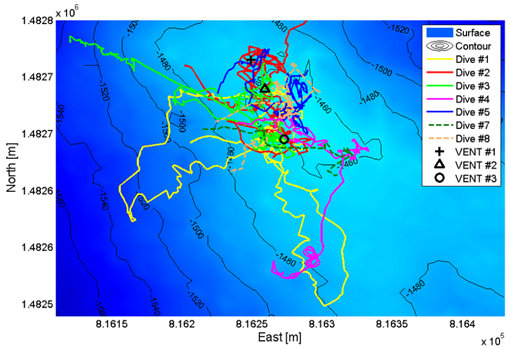
ŪēīŽĮłŽěėŽäĒ žóīžąėŽ∂Ąž∂úÍ≥ĶžĚī žěąŽäĒ Í≥≥žóźžĄú ž†ēŽįÄ ÍīÄžł°žĚĄ žúĄŪēėžó¨ Í≤Ĺžā¨žßĄ ŽįĒžúĄ žĖłŽćēžóź Ūąīžä¨Ž†ąŽďú žēěŽ∂ÄŽ∂ĄžĚĄ ÍĪłžĻėÍ≥† žěĎžóÖŪĖąŽč§. žĚī žÉĀŪÉúžóźžĄú ŪēīŽĮłŽěė Ūąīžä¨Ž†ąŽďú Ž∂ÄŽ∂ĄžĚÄ ŽįĒžúĄ žĖłŽćēžóź Í≥†ž†ēŽźėŽāė, Ž™łž≤īŽäĒ Í≥Ķž§Ďžóź ŽĖ† žěąžúľŽĮÄŽ°ú žĘĆžöį ŽėźŽäĒ žÉĀŪēėŽ°ú žĄúžĄúŪěą ŪĚĒŽď§Ž†łŽč§. žĚī žÉĀŪÉú(Fig. 7žĚė 6,500žīą ÍĶ¨ÍįĄÍ≥ľ 8,000žīą ÍĶ¨ÍįĄ)žóźžĄúŽäĒ Ž°§(Roll) ŽėźŽäĒ ŪĒľžĻė(Pitch)ÍįÄ žėĶžÖč ÍįížĚĄ ÍįĖŽäĒŽćį, žĚīŽäĒ ŪēīŽĮłŽěėÍįÄ žĄ†žąėŽ•ľ Í≤Ĺžā¨žßĄ ŽįĒžúĄžóź ÍĪłžĻėÍ≥† žąėžßĀž∂ĒžßĄÍłįŽ°ú ŽąĄŽ•īŽäĒ ŪěėžĚĄ ž£ľŽ©īžĄú ž£ľž∂ĒžßĄÍłįŽ°ú ž†ĄžßĄŽį©ŪĖ• ŪěėžĚĄ ž£ľÍ≥† žěąžúľŽĮÄŽ°ú, ŪēīŽĮłŽěė žė®ŽŹĄ, ž†ĄŽŹĄŽŹĄ, žóľŽŹĄ ŽįŹ CO2 žĄľžĄúžĚė Ž∂ĄžēēžĚĄ ŽāėŪÉÄŽāłŽč§. žóīžąėÍįÄ Ž∂Ąž∂úŽźėŽäĒ žßÄžó≠žóźžĄú žė®ŽŹĄžôÄ ž†ĄŽŹĄŽŹĄÍįÄ žė¨ŽĚľÍįÄŽ©į, žóľŽŹĄÍįÄ Ž≥ÄŽŹôŪĖąŽč§. CO2 Ž∂ĄžēēŽŹĄ žóīžąėŽ∂Ąž∂úÍ≥Ķ žßÄžó≠žóźžĄú Ž≥ÄŽŹôŪēėŽäĒ Í≤ɞ̥ žēĆ žąė žěąŽč§. Fig. 8žĚÄ Dive-01, 02, 03žóźžĄú žė®ŽŹĄŽ≥ÄŪôĒÍįÄ žěąŽäĒ Í≥≥žĚĄ ŪĎúžčúŪēú Í∑łŽ¶ľžúľŽ°úžć®, Vent 3 Ž∂ÄÍ∑ľžĚė Ūēīžąė žė®ŽŹĄÍįÄ ŽÜíÍ≤Ć Žāėžė® Í≤ɞ̥ žēĆ žąė žěąŽč§. ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāį žóīžąėŽ∂Ąž∂úÍ≥Ķ ŪÉźžā¨Ž•ľ žúĄŪēú žě†Ūē≠žĚÄ žīĚ 7ŪöĆ žč§žčúŽźźŽč§. Fig. 9ŽäĒ Dive-01~08 ÍįĀÍįĀžóź ŽĆÄŪēėžó¨ ŪēīŽĮłŽěėžĚė žąėŪŹČŽ©ī Í∂§ž†ĀžĚĄ ŽāėŪÉÄŽāłŽč§. ŪēīŽĮłŽěėžĚÄ Vent 1, 2, 3žĚĄ ÍīÄžł°ŪĖąÍ≥†, ŪäĻŪěą Vent 2žôÄ 3Ž•ľ ž†ēŽįÄ ž°įžā¨ŪĖąžúľŽĮÄŽ°ú žúĄžĻėžč†ŪėłÍįÄ žĚī Ž∂ÄÍ∑ľžóź ŽįÄžßĎŽźėžĖī ŪēīŽĮłŽěėÍįÄ žě•žčúÍįĄ ž≤īŽ•ėŪĖąžĚƞ̥ Ž≥īžĚłŽč§.
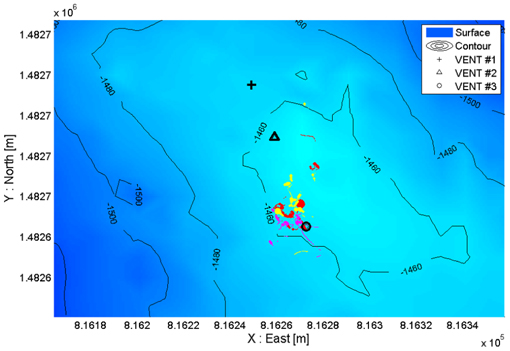
Dive-01žóźžĄúŽäĒ Ūēīž†ÄŪôĒžāį ž†ēžÉĀŽ∂Ğ󟞥ú žóīžąėŽ∂Ąž∂úÍ≥ĶžĚĄ ŪÉźžßÄŪēėŽäĒ žěĄŽ¨īŽ•ľ žąėŪĖČŪĖąŽč§. ŪēīŽĮłŽěėÍįÄ Žā®ž™ĹžúľŽ°ú žĚīŽŹôŪēėŽ©īžĄú Ž∂Äžú†žěÖžěź ŽįÄŽŹĄÍįÄ ž¶ĚÍįÄŪēėŽäĒ Í≤ɞ̥ ÍīÄžł°ŪĖąÍ≥†, žĶúžĘÖž†ĀžúľŽ°ú žóīžąėŽ∂Ąž∂úÍ≥Ķ Vent 3ÍįÄ ŪôēžĚłŽźźŽč§. ÍīÄžįįŽźú žóīžąėŽ∂Ąž∂úÍ≥ĶžĚÄ Ūą¨Ž™ÖŪēú žóīžąėŽ•ľ Ž∂Ąž∂úŪēėÍ≥† žěąžúľŽ©į, žóīžąėÍ≥Ķ žĻ®ŽčąžóźŽäĒ žÉĚŪÉúÍ≥ĄÍįÄ ŪėēžĄĪŽźėžĖī ŽßéžĚÄ žąėžĚė ŽąąŽ®ľÍ≤Ć, žě•ŽčėžÉąžöį ŽįŹ žč¨Ūēī Žč¨ŪĆĹžĚīÍįÄ ÍīÄžł°ŽźźŽč§(Fig. 10 žÉĀ&ž§Ď žįłž°į). žĚī ž£ľŽ≥ÄžóźŽäĒ ŪôúŽŹôžĚĄ Ž©ąž∂ė žĻ®Žčą(Dead chimney)ÍįÄ žāįžě¨Ūēī žěąŽč§(Fig. 11 žÉĀ). Vent 1 žßÄžó≠žĚÄ ž£ľŽ°ú Í∑úŽ™®ÍįÄ žěĎžĚÄ Ž∂Ąž∂úÍ≥ĶžĚī Ž∂ĄŪŹ¨ŪēėÍ≥†, Vent 2ŽäĒ Vent 1Í≥ľ Vent 3žĚė ž§ĎÍįĄ Í∑úŽ™®žĚīŽč§. ž†ēžÉĀŽ∂Ä Žā®ž™ĹžóźžĄúŽäĒ ŽßéžĚÄ Íįúž≤īžĚė žč¨ŪēīžāįŪėł ÍĶįŽĚĹžĚī ŪėēžĄĪŽźėžĖī žěąžĚƞ̥ ŪôēžĚłŪĖąŽč§(Fig. 11 ž§Ď). žėĀžÉĀÍīÄžł°žĚĄ žúĄŪēī ŪēīŽĮłŽěėÍįÄ žĚīŽŹô ž§Ďžóź, Ž°úŽīáŪĆĒŽ°ú ŪēłŽďú ŽĄ§Ū䳎•ľ ÍļľŽāī Žď§žĖī Ž∂Äžú†ŪĒĆŽěĎŪĀ¨ŪܧžĚĄ žĪĄžßĎŪĖąŽč§. žĚī žĪĄžßĎ žč§ŪóėžóźžĄú, ŪēīŽĮłŽěėŽäĒ 20Ž∂Ą ŽŹôžēą žēĹ 250m ÍĪįŽ¶¨Ž•ľ žĚīŽŹôŪĖąÍ≥†(Fig. 11 Ūēė), ŪŹČÍ∑†žĚīŽŹôžÜ掏ĄŽäĒ 0.4ŽÖłŪäłžėÄŽč§.

Fig, 11
Visual inspection: (top) dead chimneys, (mid) Deep-sea corals, (bottom) sampling zooplankton with hand-net.

Vent 3Ž•ľ ŽĆÄžÉĀžúľŽ°ú žóīžąėžė®ŽŹĄŽ•ľ žł°ž†ēŪĖąŽč§(Fig. 10 Ūēė). Í≥†žė®žĄľžĄúŽ•ľ žóīžąėŽ∂Ąž∂úÍ≥ĶžĚė ž§Ďžč¨žóź žēąž†ēž†ĀžúľŽ°ú žú†žßÄŪēėŽäĒ Í≤ÉžĚī žó¨žĚėžĻė žēäžēĄ žąėžė® žł°ž†ēžĚī ž†ēŪôēŪēėžßÄ žēäžēėžúľŽāė, žė®ŽŹĄÍįÄ žė¨ŽĚľÍįÄŽäĒ Í≤ĹŪĖ•žĚÄ ŪĆĆžēÖŪē† žąė žěąžóąŽč§(žóīžąėÍ≥Ķ ž£ľŽ≥Ä žóīžąėžė®ŽŹĄÍįÄ 20~30¬įŽ°ú žł°ž†ēŽź®). žóīžąėÍ≥ĶžóźžĄú Ž∂Ąž∂úŪēėŽäĒ žóīžąė žė®ŽŹĄŽ•ľ ž†ēŪôēŪēėÍ≤Ć žł°ž†ēŪēėÍłį žúĄŪēīžĄúŽäĒ Ž∂Ąž∂úÍ≥ĶžĚė žěĎžĚÄ ŪčąžúľŽ°ú žĄľžĄúŽ•ľ žāĹžěÖŪē† žąė žěąŽŹĄŽ°Ě Ž°úŽīáŪĆĒ ž°įžěĎžóź Žä•žąôŪēīžēľ ŪēúŽč§. žąėž§Ď 3žį®žõź Í≥ĶÍįĄžóźžĄú žěĎžó̥֞ ž†ēŪôēŪěą žąėŪĖČŪēėŽäĒ ž°įžĘÖŪõąŽ†®žĚī ŪēĄžöĒŪēėŽ©į, žĄľžĄú ŪĒĄŽ°úŽłĆŽ•ľ Ž≥īŽč§ ÍłłÍ≤Ć(ÍĻäÍ≤Ć) ŽßĆŽďúŽäĒ Í≤ÉžĚī žöĒÍĶ¨ŽźúŽč§.
žóīžąėŪÉźžā¨žóźžĄú ŽĮłŽĀľžĖīŽßĚ žĄ§žĻė ŽįŹ ŪöĆžąė, ŪĎłžčúžĹĒžĖīžôÄ žä§žŅ†ŪĒĄŽ•ľ žĚīžö©Ūēú Ūēīž†Ä Ūáīž†ĀŽ¨ľ žĪĄžßĎ, žĪĄžąėžě•žĻėŽ•ľ žĚīžö©Ūēú Ūēīžąė žÉėŪĒĆŽßĀ, žóīžąė žė®ŽŹĄžł°ž†ē, žēĒžĄĚžĪĄžßĎ ŽďĪ Ž™®Žď† žÉėŪĒĆŽßĀ žěĎžóÖžĚÄ Ž°úŽīáŪĆĒžĚĄ žĚīžö©ŪĖąŽč§.
ŪēīŽĮłŽěėŽäĒ Ž°úŽīáŪĆĒžĚĄ žĚīžö©Ūēėžó¨ ŽĮłŽĀľžĖīŽß̞̥ Vent 2žôÄ Vent 3 žßÄžó≠žóź ÍįĀÍįĀ 2ÍįúžĒ© žĄ§žĻėŪĖąŽč§. ŽĮłŽĀľžĖīŽß̞̥ žĄ§žĻėŪēú ŪõĄ 1žĚľ~3žĚľ Í≤ĹÍ≥ľ ŪõĄ ŪöĆžąėŪĖąžúľŽ©į, ŽąąŽ®ľÍ≤Ć, žÉąžöįŽ∂ôžĚī, žě•žĖī ŽďĪžĚė žÉĚŽ¨ľžĚī žĪĄžßĎŽźźŽč§. ž≤ėžĚĆ ž†úžěĎŽźú ŽĮłŽĀľžĖīŽßĚžĚÄ Í∑łŽ¨ľŽßĚžĚī žĄĪÍłī Í≤ÉžúľŽ°úžć® ŪöĆžąėÍ≥ľž†ēžóźžĄú ŽĆÄŽ∂ÄŽ∂ĄžĚė žč¨ŪēīžÉĚŽ¨ľŽď§žĚī ŽĻ†ž†łŽāėÍįÄŽäĒ Í≤ÉžĚī Ž™©Í≤©ŽźźŽč§. ŽĮłŽĀľžĖīŽßĚžóź ž°įŽįÄŪēú Žß̞̥ ž∂ĒÍįÄŪĖąÍ≥†, Ž≥īžôĄž°įžĻė žĚīŪõĄžóźŽäĒ ŽßéžĚÄ Íįúž≤īŽ•ľ žĪĄžßĎŪē† žąė žěąžóąŽč§. Fig. 12(žÉĀ)žĚÄ ž°įŽįÄŪēú Žß̞̥ ÍįĖŽäĒ žā¨ÍįĀŪėē ŽĮłŽĀľžĖīŽßĚžóź ŽßéžĚÄ žąėžĚė žÉĚŽ™Öž≤īÍįÄ žě°ŪėÄ žěąŽäĒ Í≤ɞ̥ Ž≥īžĚłŽč§. žĚī ŪäłŽě©žóź žóīžąėžÉĚŽ™Öž≤īÍįÄ 148ŽßąŽ¶¨ žĪĄžßĎŽźźŽč§. ŪēėŽč® Í∑łŽ¶ľžĚÄ žĄĪÍłī ŽßĚžúľŽ°ú ŽßƎ吏ĖīžßĄ žõźŪÜĶŪėē ŽĮłŽĀľžĖīŽßĚ ŪöĆžąėžě•Ž©īžĚīŽ©į, ŪĀį ŪĀ¨ÍłįžĚė ŽąąŽ®ľÍ≤ĆŽßĆžĚī ŪŹ¨Ūö掟źŽč§.
Fig. 12
Bait trap recovery near Vent 3 of Forecast volcano: (top) Pilot view, (bottom) top view with vertical camera.

ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāįžĚė žóīžąėŽ∂Ąž∂úÍ≥ĶžóźžĄú žú†ž∂úŽźėŽäĒ žěÖžěźŪĒĆŽü≠žä§Ž•ľ žł°ž†ēŪēėÍłį žúĄŪēėžó¨ žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻėŽ•ľ žĄ§žĻėŪĖąŽč§. Ūáīž†ĀŽ¨ľ ŪŹ¨žßĎžě•žĻėŽäĒ ŪĀ¨ÍłįÍįÄ ŪĀī ŽŅźŽßĆ žēĄŽčąŽĚľ ž§ĎŽüČžĚī Ž¨īÍĪįžöī ŪéłžĚīŽĮÄŽ°ú žěĎžóÖžóź ž£ľžĚėÍįÄ ŪēĄžöĒŪĖąŽč§. žĄ§žĻėžąúžĄúŽäĒ ŪŹ¨žßĎžě•žĻėŽ•ľ žöįžł° Ž°úŽīáŪĆĒŽ°ú Žď§Í≥†, žĚī žÉĀŪÉúžóźžĄú Ūąīžä¨Ž†ąŽďúŽ•ľ ŽĀĆžĖīŽď§žĚīÍ≥†, Í≤Ĺžā¨žßĄ Ūēīž†Ä Ūáīž†ĀŪ܆ ž§ĎžóźžĄú žĄ§žĻėŪēėÍłįžóź ÍįÄžě• ž†ĀŪē©Ūēú žßÄž†źžúľŽ°ú Ž°úŽīáŪĆĒžĚĄ ÍłłÍ≤Ć ŽĽóžĖī ŪŹ¨žßĎžě•žĻėŽ•ľ žúĄžĻėžčúŪā§Í≥†, ŪŹ¨žßĎžě•žĻėŽ•ľ žąėžßĀŽį©ŪĖ•žúľŽ°ú ŽāīŽ†§ŽÜďžúľŽ©īžĄú, žßÄŽ©īžóź ŽčŅžĚÄ ŪõĄžóźŽŹĄ žĄúžĄúŪěą ŽąĄŽ•īŽ©į žį©žßÄžčúžľú žąėžßĀŪēú žěźžĄłÍįÄ ŽźėŽŹĄŽ°Ě žĄ§žĻėŪĖąŽč§. Vent 3žúľŽ°úŽ∂ÄŪĄį ŽŹôŽā®ŽŹô Žį©ŪĖ•žúľŽ°ú žēĹ 50m ŽĖ®žĖīžßĄ žôĄŽßĆŪēú Í≤Ĺžā¨Ž©īžóź ŪēīŽĮłŽěėŽ•ľ žį©žßÄŪēėÍ≥† žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻėŽ•ľ žĄ§žĻėŪĖąŽč§. Fig. 13(žÉĀ)žĚÄ Vent 3 Í∑ľž≤ėžóź žĄ§žĻėŽźú Ūáīž†ĀŽ¨ľ ŪŹ¨žßĎžě•žĻėŽ•ľ ŽāėŪÉÄŽāłŽč§.
Fig. 13
(top) Sediment trap deployed at Forecast volcano, (bottom) recovery of the sediment trap 5 days later.
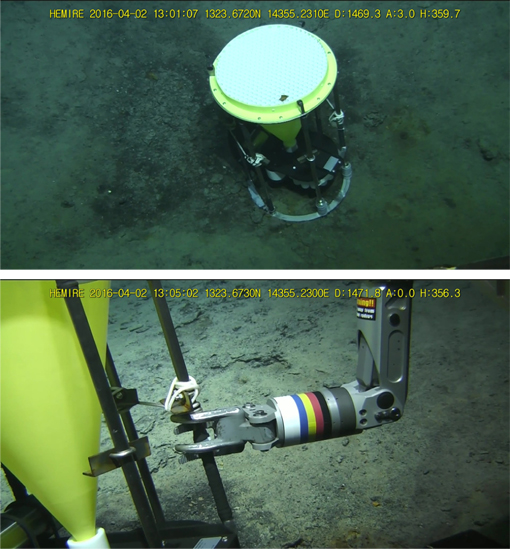
žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻė ŪöĆžąėŽäĒ žĄ§žĻėžĚė žó≠žąúžúľŽ°ú žąėŪĖČŪĖąŽč§. žöįžł° Ž°úŽīáŪĆĒžĚĄ žĚīžö©Ūēėžó¨ ŪŹ¨žßĎžě•žĻėŽ•ľ Žď§žĚÄ Žč§žĚĆžóź(Fig. 13 Ūēė), žčúŽ£Ć ŽįĒÍĶ¨ŽčąŽ•ľ ŽįÄžĖīŽāīžóąŽč§. žĚīŽēĆ žąėžßĀ žĻīŽ©ĒŽĚľžôÄ ŪĆƞ̾ŽüŅ žĻīŽ©ĒŽĚľŽ•ľ žĚīžö©Ūēėžó¨ žčúŽ£ĆŽįĒÍĶ¨ŽčąžôÄ ŪŹ¨žßĎžě•žĻėžĚė ÍįĄžĄ≠žĚĄ ŪôēžĚłŪēėŽ©į žěĎžó̥֞ žąėŪĖČŪĖąŽč§. Ūąīžä¨Ž†ąŽďúÍįÄ ž∂©Ž∂ĄŪěą ŽĻ†ž†łŽāėžė® ŪõĄ ŪŹ¨žßĎžě•žĻėŽ•ľ ŪčĞ䨎†ąŽďú žúĄžóź žė¨Ž†§ŽÜďžēėŽč§. žĚīŪõĄ žĖĎž™Ĺ Ž°úŽīáŪĆĒŽ°ú ŪŹ¨žßĎžě•žĻėŽ•ľ Ž∂ôžě°žĚÄ žÉĀŪÉúžóźžĄú žú†žēē ž†ĄžõźžĚĄ žį®Žč®ŪēėÍ≥† ŪēīŽĮłŽěėŽ•ľ Ž∂ÄžÉĀžčúŪā®Žč§. ŪēīŽĮłŽěėÍįÄ žąėŽ©ī Í∑ľž≤ė(žēĹ 100m)žóź ŽŹĄŽč¨ŪĖąžĚĄ ŽēĆ žú†žēēžčúžä§ŪÖúžĚĄ Žč§žčú žěĎŽŹôŪēėžó¨, ŪŹ¨žßĎžě•žĻėŽ•ľ žě°Í≥† žěąŽäĒ Í∑łŽěėŽ≤Ąžóź žú†žēēžĚĄ ÍįÄŪĖąŽč§. ž†ĄžõźžĚī žį®Žč®Žź† Í≤Ĺžöį Í∑łŽěėŽ≤ĄŽäĒ žú†žēēžĚī ŽĻ†žßĄŽč§. ŽĒįŽĚľžĄú žąėŽ©īÍ∑ľž≤ėžóźžĄú ŪĆĆŽŹĄžöīŽŹôžóź žĚėŪēī žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻėÍįÄ ŪĚĒŽď§Ž†§ Ž∂ąžēąž†ēŪēú žěźžĄłÍįÄ Žź† žąė žěąžúľŽĮÄŽ°ú žĚīŽ•ľ Žį©žßÄŪēėÍłį žúĄŪēú ž°įžĻėžĚīŽč§.
ŪēīŽĮłŽěėžóź žě•žį©Žźú Ž©ÄŪčįŽĻĒžÜĆŽāėžôÄ 3žĄĪŽ∂ĄžěźŽ†•Í≥ĄŽ•ľ žĚīžö©Ūēėžó¨ Ūēīž†ÄŽ©ī Í∑ľž†Ď ž†ēŽįÄžßÄŪėēž°įžā¨ ŽįŹ žßÄžěźÍłį Ž≥ÄŪôĒŽ•ľ Í≥Ąžł°ŪĖąŽč§. žĚī žč§ŪóėžĚÄ žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻė žĄ§žĻė žěĄŽ¨īŽ•ľ žôĄžąėŪēú žĚīŪõĄ žĚīžĖīžĄú žąėŪĖČŽźźŽč§. Ūēīž†Äžāį ž†ēžÉĀŽ∂Ä ž£ľŽä•žĄ† Žį©ŪĖ•žĚĄ ŽĒįŽĚľ žēĹ 150m ÍłłžĚīžĚė žł°žĄ† 2ÍįúžôÄ žĚīžóź žąėžßĀŪēú žł°žĄ† 1ÍįúŽ•ľ žĄ§ž†ēŪēėÍ≥†, žĚī žł°žĄ†žĚĄ ŽĒįŽĚľ ŪēīŽĮłŽěėÍįÄ žĚīŽŹôŪēėŽ©į 3žĄĪŽ∂ĄžěźŽ†•Í≥ĄžôÄ Ž©ÄŪčįŽĻĒžÜĆŽāė žč†ŪėłŽ•ľ ž∑®ŽďĚŪēėŽäĒ ž†ĄŽěĶžĚīŽč§.
ŪēúŪéł, žē장ú žĖłÍłČŪēú ŽįĒžôÄ ÍįôžĚī žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻėŽäĒ žąėž§Ď Ž¨īÍ≤ĆÍįÄ žēĹ 33kgžĚīŽĮÄŽ°ú, ŪēīŽĮłŽěėÍįÄ ŪŹ¨žßĎžě•žĻėŽ•ľ ŽāīŽ†§ŽÜďžúľŽ©ī Ž∂ÄŽ†•žĚī 33kg ž¶ĚÍįÄŪēėÍ≤Ć ŽźúŽč§. ŪēúŪéł, ŪēīŽĮłŽěėŽäĒ Ž∂ÄŽ†•žóź žĚėŪēú ž†ēž†ĀŪēėž§ĎžĚĄ žąúŽį©ŪĖ• Í∂§Ūôė(Feed forward)žúľŽ°ú Ž≥īžÉĀŪēėÍ≥† žč¨ŽŹĄ žė§žį®Ž•ľ PDž†úžĖīŪēėŽäĒ Žį©žčĚ Fdepth control = Ffeed forward +FPDžúľŽ°ú žč¨ŽŹĄž†úžĖīÍłįÍįÄ ÍĶ¨žĄĪŽźėžóąŽč§.
žĚī Žį©Ž≤ēžĚÄ Ž∂ÄŽ†•žóź žĚėŪēú žôłŽ†•žĚĄ žąúŽį©ŪĖ• Ž≥īžÉĀŪē®žúľŽ°úžć® žēąž†ēž†ĀžĚł žč¨ŽŹĄ ž†úžĖīŽ•ľ ÍĶ¨ŪėĄŪē† žąė žěąŽč§. žąėž§ĎŽ∂ÄŽ†•žĚī Ž≥ÄŪēėŽäĒ Í≤ĹžöįžóźŽäĒ žąúŽį©ŪĖ• ž†úžĖīžĄĪŽ∂ĄžĚĄ Ž≥ÄÍ≤ĹŪēėŽäĒ Í≤ÉžĚī ŪēĄžöĒŪēėŽč§. Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ, ŪēīŽĮłŽěėÍįÄ žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻėŽ•ľ žĄ§žĻėŪēú žĚīŪõĄ, žąėŽŹôž†úžĖī Ž™®ŽďúŽ°ú ž†ĄŪôėŪēėžó¨ ž∂ĒžßĄÍłįŽ•ľ žąėŽŹôžúľŽ°ú ž†úžĖīŪēėŽ©į žč¨ŽŹĄŽ•ľ žú†žßÄŪēėŽäĒ žąėžßĀž∂ĒžßĄÍłį Ž™ÖŽ†ĻžĚĄ žįĺžēėžúľŽ©į, žĚī ÍįížĚĄ žąúŽį©ŪĖ• Í∂§Ūôė ž†úžĖīŽ†•žúľŽ°ú ŽĆÄž≤īŪēėÍ≥†, žč¨ŽŹĄž†úžĖī Ž™®ŽďúŽ°ú ž†ĄŪôėŪēėžó¨ žěźŽŹôž†úžĖīŽ•ľ žąėŪĖČŪĖąŽč§. Ž≥ł žč§ŪóėžóźžĄú ŪēīŽĮłŽěėŽäĒ žĚľž†ē žąėžč¨žĚĄ žú†žßÄŪēėŽŹĄŽ°Ě žč¨ŽŹĄž†úžĖīŽ•ľ žąėŪĖČŪēėŽ©īžĄú Í∂§ž†ĀžĚĄ ž∂Ēž†ĀŪĖąŽč§. ŪēīŽĮłŽěėÍįÄ Ūēīž†ÄŪôĒžāį ž†ēžÉĀŽ∂Ğ󟞥ú žēĹ 30mžĚė Í≥†ŽŹĄŽ•ľ ÍįĖŽŹĄŽ°Ě 1,418m žąėžč¨žĚĄ žú†žßÄŪēėÍ≤Ć ž†úžĖīŪĖąŽč§.
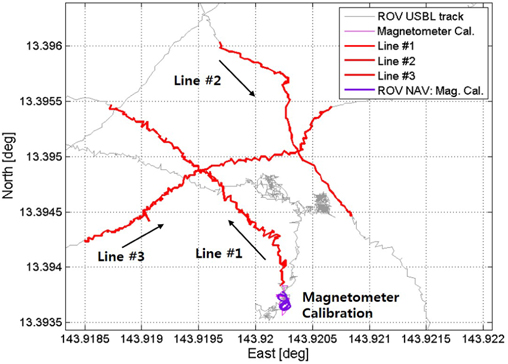
DP(Dynamic positioning)Ž•ľ ÍįĖž∂ĒžßÄ Ž™ĽŪēú žė®ŽąĄŽ¶¨ŪėłÍįÄ ž£ľžĖīžßĄ žł°žĄ†žĚĄ ž†ēŪôēŪēėÍ≤Ć ž∂Ēž†ĀŪēėŽäĒ Í≤ÉžĚÄ žĖīŽ†§žöī žěĎžóÖžĚīŽč§. ŪēīŽĮłŽěėÍįÄ Í∂§ž†ĀžĚĄ ŽĒįŽĚľ žĚīŽŹôŪēėÍłį žúĄŪēīžĄúŽäĒ ŪēīŽąĄŽĻĄÍįÄ Ūē®ÍĽė žĚīŽŹôŪēīžēľ ŪēėŽäĒŽćį, žė®ŽąĄŽ¶¨ŪėłÍįÄ ŪēīŽąĄŽĻĄŽ•ľ ž†ēŪôēŪēú Í∂§ž†ĀžúľŽ°ú žĚīŽŹôŪēėŽŹĄŽ°Ě žėąžĚłŪēėŽäĒ Í≤ÉžĚÄ ÍĪįžĚė Ž∂ąÍįÄŽä•ŪēėŽč§. Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ ŪēīŽąĄŽĻĄÍįÄ žł°žĄ†žĚĄ ÍįúŽěĶž†ĀžúľŽ°ú ŽĒįŽĚľÍįÄŽŹĄŽ°Ě žė®ŽąĄŽ¶¨Ūėł Ūē≠Ūēīžā¨ÍįÄ ŪēīŽąĄŽĻĄ žúĄžĻėŽ•ľ Ž™®ŽčąŪĄįŽßĀŪēėŽ©īžĄú Ž™®žĄ†žĚĄ žąėŽŹôžúľŽ°ú ž°įžĘÖŪĖąÍ≥†, ŪēīŽąĄŽĻĄÍįÄ žĚīŽŹôŪēėŽäĒ Í∂§ž†ĀžĚĄ ŽĒįŽĚľ ŪēīŽĮłŽěėŽ•ľ ž°įžĘÖŪēėŽ©į žßÄžěźÍłįŽ•ľ žł°ž†ēŪĖąŽč§. Fig. 14ŽäĒ ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāį ž£ľŽ≥ÄžĚė žßÄžěźÍłį žł°ž†ēžĚĄ žúĄŪēú ŪēīŽĮłŽěėžĚė žĚīŽŹôÍ∂§ž†ĀžĚĄ ŽāėŪÉÄŽāłŽč§. ÍĶĶžĚÄ ž†ĀžÉȞ觞Ą†žĚÄ 3Íįú žł°žĄ†žĚĄ ŽĒįŽ•īŽäĒ ŪēīŽĮłŽěė Í∂§ž†ĀžĚĄ ŽāėŪÉÄŽāłŽč§. DP ŽĻĄžě•žį© Ž™®žĄ†žĚī žó¨Žü¨ ÍįúžĚė žł°žĄ†žĚĄ ŪÉÄÍłį žúĄŪēīžĄúŽäĒ žĽ§Žč§ŽěÄ žĄ†ŪöĆŽįėÍ≤ĹžĚī ŪēĄžöĒŪĖąÍ≥† žė§Žěú žčúÍįĄžĚī žÜĆžöĒŽźźŽč§. ŽĻĄŽ°Ě Í∂§ž†ĀžĚÄ Í≥°žĄ†žĚīŽāė ŪēīŽĮłŽěėžĚė žúĄžĻė, žöīŽŹôÍ≥ľ žěźžĄł žł°ž†ēžĻėŽ•ľ žĚīžö©Ūēėžó¨ žßÄžěźÍłį žł°ž†ēÍįížĚĄ Ž≥īž†ēŪē† žąė žěąŽč§. žßÄžěźÍłį žł°ž†ēÍ≤įÍ≥ľŽäĒ ŪēúÍĶ≠ŪēīžĖĎžóįÍĶ¨žõź žč¨Ūēīž†ÄÍīĎŽ¨ľžěźžõźžóįÍĶ¨žĄľŪĄįžóźžĄú Ž∂ĄžĄĚž§ĎžĚīŽč§. Í∑łŽ¶ľžóźžĄú ŪēėŽč®žĚė ‚Äė8‚Äôžěź Í∂§ž†ĀžĚÄ žßÄžěźÍłį žĄľžĄúžĚė žļėŽ¶¨ŽłĆŽ†ąžĚīžÖėžĚĄ žúĄŪēú Í≤ÉžúľŽ°úžć® 8žěź Í∂§ž†ĀžĚĄ 2ŪöĆ ŽįėŽ≥ĶŪēėžėÄŽč§. ŪēīŽąĄŽĻĄ Í∂§ž†ĀžĚī žßĀžĄ†žĚī žēĄŽčąžóąÍ≥†, ŪēīŽĮłŽěėžĚė Í∂§ž†Ā ŽėźŪēú ÍĶ¨Ž∂ÄŽü¨žßĄ Í∂§ž†ĀžĚĄ Ž≥īžĚīÍ≥† žěąŽč§. 8žěź Í∂§ž†ĀžĚÄ ŪēīŽĮłŽěėŽ•ľ žĚľž†ēžÜ掏ĄŽ°ú ž†ĄžßĄŪēėŽ©īžĄú žĄ†žąėÍįĀžĚĄ žĚľž†ēŪēú žÜ掏ĄŽ°ú Ž≥ÄÍ≤ĹŪēėŽ©į ŽßƎ吏óąŽč§.
Fig. 14
Planar track of Dive-04 for multibeam survey and magnetic field measurement with magnetometer.
ŪēúŪéł, ŪÉźžā¨žßÄžó≠žĚÄ žßÄŪėēžĚī žč¨ŪēėÍ≤Ć Í≤Ĺžā¨žßÄÍ≥† ÍĶīÍ≥°ž†ł žěąžĖī, žßÄŪėē ŪäĻžĄĪžÉĀ M3 žÜĆŽāėžĚė žĚĆŪĖ•Žįėžā¨ žč†Ūėłžóź žÜźžč§Í≥ľ žôúÍ≥°žĚī ŽßéžĚī ŽįúžÉĚŪĖąŽč§. ŽėźŪēú Ūēīž†Äž†ēŽįÄžßÄŪėē ŪÉźžā¨ÍįÄ ž£ľŽ™©ž†ĀžĚī žēĄŽčąŽĚľ 3žĄĪŽ∂Ą žěźŽ†•ŪÉźžā¨žč§ŪóėÍ≥ľ Ž≥ĎŪĖČŪēėžó¨ Í≥Ąžł°Ūēī žĖĽžĖīžßĄ žěźŽ£ĆžĚīÍłį ŽēĆŽ¨łžóź, ŽĻĒžĚė ž§Ďž≤©žĚī ÍĪįžĚė žĚīŽ£®žĖīžßÄžßÄ žēäžēĄžĄú ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāįžĚė ž†ēŽįÄ Ūēīž†ÄžßÄŪėēŽŹĄ žěĎžĄĪžóźŽäĒ Ž¨īŽ¶¨ÍįÄ žěąžóąŽč§. Ž©ÄŪčįŽĻĒžÜĆŽāėŽ•ľ žĚīžö©Ūēėžó¨ Ūēīž†ÄžßÄŪėēžĚĄ ž†ēŽįÄŪēėÍ≤Ć Žß§ŪēĎŪēėÍłį žúĄŪēīžĄúŽäĒ Ž≥īŽč§ ž°įŽįÄŪēú ÍįĄÍ≤©žúľŽ°ú žč†ŪėłŽ•ľ Í≥Ąžł°Ūē† ŪēĄžöĒÍįÄ žěąŽč§.
ŪŹ¨žľÄžä§Ūäł ŪôĒžāį ž†ēžÉĀžĚÄ žö©žēĒžĚī Ž∂Ąž∂úŽźėžĖī žßÄŪėēŽ≥ÄŪôĒÍįÄ Žß§žöį žč¨Ūēėžó¨ Ūáīž†ĀŽ¨ľžĚī žĆďžĚł Í≥≥žĚĄ žįĺÍłį žČĹžßÄ žēäžēėŽč§. žĻ®ž†ĄŽ¨ľŪŹ¨žßĎžě•žĻėŽ•ľ žĄ§žĻėŪēú žßÄž†źžĚī Ūáīž†ĀŽ¨ľ žĪĄžßĎžóź ÍįÄžě• žú†Ž¶¨Ūēú Í≥≥žĚīŽĮÄŽ°ú, ŪŹ¨žßĎžě•žĻėŽ•ľ žĄ§žĻėŪēėÍ≥† 2~3m Ží§Ž°ú žĚīŽŹôŪēú žßÄž†źžóźžĄú ŪĎłžčúžĹĒžĖīŽßĀÍ≥ľ žä§žŅ†ŪēϞ̥ žč§žčúŪĖąŽč§. ŪôĒžāįžßÄžó≠žóź žĆďžĚł Ūáīž†ĀŽĮą žłĶžĚī žĖēžēĄ ŪĎłžčúžĹĒžĖīŽü¨Ž•ľ 10cm žĚīžÉĀ ŽąĄŽ•īŽ©ī ŪēīŽĮłŽěė Ž≥łž≤īÍįÄ Žď§Ž†łŽč§. ŽĒįŽĚľžĄú Ūáīž†ĀŽ¨ľ žĪĄžßϞ̥ žúĄŪēėžó¨ Ūēú žßÄž†źžóźžĄú ŪĎłžčúžĹĒžĖīŽßĀžĚĄ ŽßąžĻėÍ≥† žąėŪŹČžúľŽ°ú žĚīŽŹôŪēī Žč§žčú ŪĎłžčúŪēėŽäĒ Í≥ľž†ēžĚĄ 5ŪöĆ ŽįėŽ≥ĶŪēīžĄú žĹĒžĖīŽßĀŪēėžó¨ Ūáīž†ĀŽ¨ľžĚĄ žĪĄžßĎŪĖąŽč§. žä§žŅ†ŪēĎžĚÄ Ūēīž†ÄŽ©ī ŪĎúžłĶžĚĄ ŽĒįŽĚľ žä§žŅ†ŪĒĄŽ•ľ ŪõĎžúľŽ©į Žú®ŽäĒ Žį©žčĚžúľŽ°ú žąėŪĖČŪĖąŽč§. Fig. 15(žÉĀ)Í≥ľ (ž§Ď)žĚÄ ŪĎłžčúžĹĒžĖīŽßĀÍ≥ľ žä§žŅ†ŪēĎ žě•Ž©īžĚĄ Ž≥īžĚłŽč§. Žčąžä§Ūā®Ž≥īŪčÄ(Niskin bottle)žĚĄ žĚīžö©Ūēú žĪĄžąėŽäĒ ŪēĄžöĒŪēú žßÄž†źžóźžĄú Ž°úŽīáŪĆĒžĚĄ žĚīžö©Ūēėžó¨ žĪĄžąėÍłįžĚė Ū䳎¶¨ÍĪį Ž≤ĄŪ侞̥ ŽąĆŽü¨ ž∑®ŽďĚŪĖąŽč§.

3.2 žēĆŪā§žēą(Archaean) žóīžąėŽ∂Ąž∂úÍ≥Ķ ŪÉźžā¨
žēĆŪā§žēą žóīžąėŽ∂Ąž∂úÍ≥ĶžĚĄ ŪÉźžā¨ŽäĒ Dive-06Í≥ľ Dive-09 2ŪöĆ žčúŽŹĄŽźźŽč§. Dive-06ŽäĒ žě†Ūē≠ž§Ď ŪēīžÉĀžÉĀŪÉú žēÖŪôĒŽ°ú žĚłŪēėžó¨ Ž™®žĄ†žóź Í≥ľŽŹĄŪēú ŪĒľžĻ≠žĚī ŽįúžÉĚŪĖąžúľŽ©į, Í≥ľŽŹĄ ŪĒľžĻ≠žĚī ŽįėŽ≥ĶŽźėŽ©īžĄú 1žį® žľÄžĚīŽłĒ ŪĄįŽĮłŽĄ§žĚīŪĄį ž†ąžóįžĚī žÜźžÉĀŽźėžĖī ŪÉźžā¨Ž•ľ ž§ĎŽč®ŪēėÍ≥† ŪēīŽĮłŽěėŽ•ľ ŪöĆžąėŪĖąŽč§. ŪĄįŽĮłŽĄ§žĚīŪĄį Ž≥ĶÍĶ¨ ŪõĄ, ŪÉźžā¨ žöįžĄ†žąúžúĄžóź ŽĒįŽĚľ ŪŹ¨žľÄžä§Ūäł Ūēīžó≠žĚė Dive-07, 08žĚĄ Ž®ľž†Ä žč§žčúŪēėÍ≥† žĚīžĖīžĄú žēĆŪā§žēą žóīžąėŪÉźžā¨ Dive-09žĚĄ žąėŪĖČŪĖąŽč§.
Žā®ŽßąŽ¶¨žēĄŽāė Ū䳎ü¨ŪĒĄžĚė Ūôēžě•ž∂ē ŽįĒÍĻ•ž™Ĺ Í≤Ĺžā¨Ž©īžóź žúĄžĻėŪēėŽäĒ žēĆŪā§žēą žóīžąėŽ∂Ąž∂úÍ≥ĶžĚÄ žēĹ 3,000m žąėžč¨žóź Ž∂ĄŪŹ¨ŪēėÍ≥†, 12¬į 56.30‚ÄôN, 143¬į37.90‚ÄôE ž£ľŽ≥Äžóź ž°īžě¨ŪēėŽäĒ Í≤ÉžúľŽ°ú Ž≥īÍ≥†ŽźźŽč§. Dive-09žóźžĄúŽäĒ Žā®Ž∂ĀŽį©ŪĖ•žúľŽ°ú 200m ÍĪįŽ¶¨Ž•ľ ÍįĖŽäĒ 2ÍįúžĚė Í≤Ĺžú†ž†źžĚĄ žßÄž†ēŪēėÍ≥†, žĚī ž§Ďžč¨žúľŽ°úŽ∂ÄŪĄį žēĹ 2km Ž∂Āž™ĹŽį©ŪĖ•žóźžĄú žě†žąėž†ēžĚĄ žßĄžąėŪēėžó¨ 0.5ŽÖłŪäł žĚīŪēėŽ°ú žėąžĚłŪēėŽ©į žě†Ūē≠ŪĖąŽč§. žąėžč¨ 2,950m, Ž™©ŪĎúž†ź 500m Ž∂ĀŽį© žßÄž†źŽ∂ÄŪĄį ŪēīŽĮłŽěėŽ•ľ ŪÉźžā¨ Ž™®ŽďúŽ°ú ž†ĄŪôėŪĖąÍ≥†, Žā®ž™ĹžúľŽ°ú žĚīŽŹôŪēėŽ©īžĄú žēĆŪā§žēą žóīžąėžßÄžó≠ Ūēīž†ÄŽ•ľ ÍīÄžł°ŪĖąŽč§. Fig. 16žĚÄ žēĆŪā§žēą žóīžąėžßÄžó≠žĚĄ ŪÉźžā¨Ūēú ŪēīŽĮłŽěėžĚė USBL Í∂§ž†ĀžĚĄ ŽāėŪÉÄŽāłŽč§. žąėžč¨žĚī ŪŹ¨žľÄžä§Ūäł žßÄžó≠Ž≥īŽč§ ÍĻäžĖī ŪēīŽĮłŽěėÍįÄ žě†Ūē≠Ūē† ŽēĆ Ž™®žĄ†Í≥ľžĚė žĚīÍ≤©ÍĪįŽ¶¨ÍįÄ žĽ§žßÄŽ©į USBLžĚė žúĄžĻėžąėžč†žóź žēĄžõÉŽĚľžĚīžĖīÍįÄ ŪŹ¨žľÄžä§ŪäłžĚė Í≤ĹžöįŽ≥īŽč§ŽäĒ ŽćĒ žěźž£ľ ŽįúžÉĚŪĖąŽč§. ŪēīŽĮłŽěėÍįÄ Ūēīž†ÄŽ©ī Í∑ľž≤ėžóź žĚīŽ•īŽü¨žĄúŽäĒ ŪēúŽŹôžēą ŽłĒŽěôžēĄžõÉ ŪėĄžÉĀžĚī ŽįúžÉĚŪĖąŽč§. ŽłĒŽěôžēĄžõÉžĚī ŽįúžÉĚŪēėŽ©ī ŪēīŽĮłŽěėŽäĒ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúŽßƞ̥ žĚīžö©Ūēėžó¨ žöīŪē≠ŪĖąžúľŽ©į, žú†Ūö®Ūēú USBL žč†ŪėłÍįÄ žĖĽžĖīžßÄŽ©ī žĚīŽ•ľ žĚīžö©Ūēėžó¨ žúĄžĻėŽ•ľ Ž≥īž†ēŪĖąŽč§. Í∑łŽ¶ľžóźžĄú Ž∂ČžĚÄ žĄ†žĚÄ ŪēīŽĮłŽěė Ūē≠Ž≤ē Í∂§ž†Ā, ŪĆĆŽěÄ žĄ†žĚÄ USBL žł°ž†ēžč†ŪėłŽ•ľ ŽāėŪÉÄŽāłŽč§. Í∑łŽ¶ľ ž§ĎžēôžĚė ŪēīŽĮłŽěė Ūē≠Ž≤ē Í∂§ž†Āžóź žēĄžõÉŽĚľžĚīžĖīÍįÄ ŽįúžÉĚŪēú Í≤ÉžĚÄ USBL žč†ŪėłŽ•ľ žĚīžö©Ūēú ŪēīŽĮłŽěė Ūē≠Ž≤ēžúĄžĻė Ž≥īž†ēžóź žěėŽ™ĽŽźú USBL žč†ŪėłÍįÄ žĚīžö©Žźú ÍĻĆŽč≠žĚīŽč§. ž†ēžÉĀ USBL žč†ŪėłŽ•ľ žĚīžö©Ūēī Ž≥īž†ēŪēú žĚīŪõĄžóźŽäĒ ŪēīŽĮłŽěė Í∂§ž†ĀžĚī ž†ēžÉĀžúľŽ°ú ŽŹĆžēĄžôĒŽč§.

ŪÉźžā¨ žčúžěĎ žßÄž†źžóźŽäĒ Ūáīž†ĀŽ¨ľžĚī žĖáÍ≤Ć Žć•ŪěĆ ŪôĒžāįžēĒ ÍĶ¨ž°įÍįÄ ÍīÄžł°ŽźźžúľŽ©į, žßÄÍįĀ Ūôēžě•žóź ŽĒįŽ•ł Ž≥ÄŪėēÍĶ¨ž°įŽ°ú Ž≥īžĚīŽäĒ ÍįąŽĚľžßĄ Ū蹎吏Ěī žĘÖžĘÖ Ž™©Í≤©ŽźźŽč§. Fig. 17žĚÄ žēĆŪā§žēą žóīžąėŽ∂Ąž∂ĒÍ≥ĶžĚĄ žąėžÉČŪēėŽ©į žĚīŽŹô ž§Ďžóź ŽįúÍ≤¨Ūēú žßÄŪėēžúľŽ°úžĄú žßÄÍįĀžĚī ÍįąŽĚľžßĄ Ž™®žäĶžĚĄ ŪôēžĚłŪē† žąė žěąžóąŽč§. žĚī žßÄžó≠žĚÄ žāŅÍįďŪėēŪÉúžĚė ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāį žßÄžó≠Í≥ľŽäĒ Žč¨Ž¶¨ žßÄÍįĀžĚī ÍįąŽĚľžßÄŽ©īžĄú ŪėĎÍ≥°žĚī ŽßƎ吏ĖīžßĄ ŪėēŪÉúžĚė žßÄŪėēžĚĄ Ž≥īžėÄŽč§. žóīžąėŽ∂Ąž∂úÍ≥ĶžĚĄ žąėžÉČŪēėŽ©į žĚīŽŹôž§Ďžóź žēĹ 20m ŽÜížĚī žĖłŽćēžĚĄ žąėžį®Ž°Ä ŽĄėžóąŽč§. Ūēīž†ÄŽ©ī žēĒŽįėžúĄžóźŽäĒ Í≤ÄŪöĆžÉČžĚė žě֞쟎吏Ěī žĆďžó¨ žěąžóąžúľŽ©į, Ūēīžąėž§Ď Ž∂Äžú†Ž¨ľžĚī Žč§ŽüČ ž°īžě¨Ūēėžó¨ žóīžąėŪôúŽŹôžĚī Žß§žöį ŪôúŽįúŪē®žĚĄ žēĆ žąė žěąžóąŽč§.
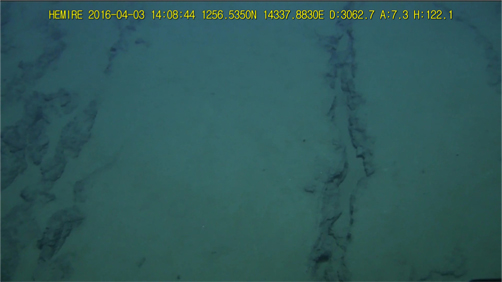
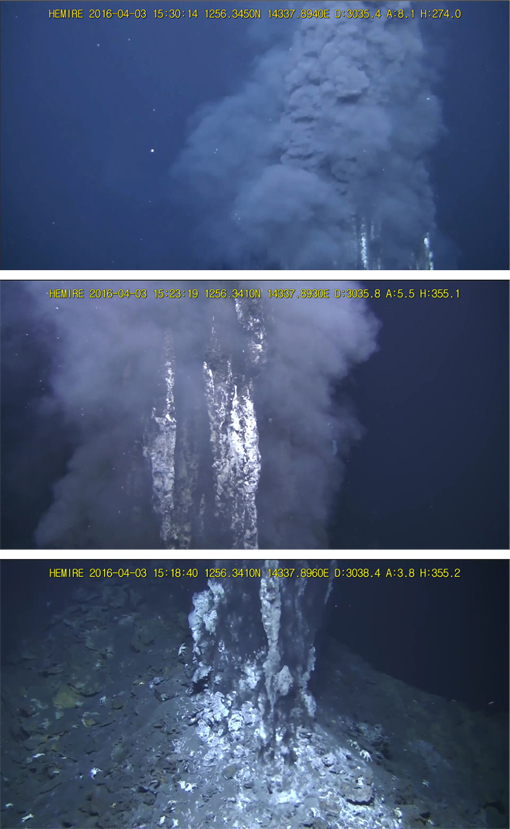
žě†žąėž†ēžĚī Ž™©ŪĎúžßÄžó≠žóź ž†ĎÍ∑ľŪē®žóź ŽĒįŽĚľ žóīžąėÍ≥Ķ ž£ľŽ≥Äžóź žĄúžčĚŪēėŽäĒ Í≤ÉžúľŽ°ú Ž≥īžĚīŽäĒ žÉĚŽ¨ľŽď§žĚī Ž≥īžĚīÍłį žčúžěĎŪĖąÍ≥†, Ūô©žÉČ ŪėĻžĚÄ ŪĚĎžÉČžĚė Ūáīž†ĀŽ¨ľžĚī ÍīÄžįįŽźźŽč§. žĚīžĖīžĄú ŽćįŽďú žĻ®Žčą(Dead chimney)žôÄ ŽćįŽďú žĻ®ŽčąÍįÄ Ž¨īŽĄąžßĄ Í≤ÉžúľŽ°ú ž∂Ēž†ēŽźėŽäĒ ŽįĒžúĄ ž°įÍįĀŽď§žĚī ŪôēžĚłŽźźŽč§. ŽÖĻŪô©žÉČ Ūáīž†ĀŽ¨ľžĚī ŪĚėŽü¨ŽāīŽ¶į ŪĚĒž†ĀžĚī žěąŽäĒ Í≤Ĺžā¨Ž©īžĚĄ ŽĒįŽĚľ Ž∂ÄžÉĀŪēėžěź Í≤ÄžĚÄ žóįÍłįŽ•ľ ŪôúŽįúŪēėÍ≤Ć Ž∂Ąž∂úŪēėŽäĒ ŪĚĎžóįžóīžąėŽ∂Ąž∂úÍ≥Ķ(Black smoker)žĚĄ ŽįúÍ≤¨ŪĖąŽč§. Fig. 18žĚÄ žēĆŪā§žēą žßÄžó≠žóźžĄú žįĺžĚÄ ŪĚĎžóįžóīžąėŽ∂Ąž∂úÍ≥ĶžĚė žÉĀŽč®, ž§Ďžēô, Íłįž†ÄŽ∂ÄŽ•ľ ŽāėŪÉÄŽāłŽč§. Žč§žąėžĚė žĻ®ŽčąÍįÄ Žč§ŽįúŽ°ú Ž≠ČžĻú ŪĚĎžóį Ž∂Ąž∂úÍ≥Ķ ŽÜížĚīŽäĒ žēĹ 3~4mŽ°ú ž∂Ēž†ēŽźúŽč§. žóīžąėÍ≥Ķ ž§Ďžč¨Ž∂ÄŽäĒ Í≤ÄžĚÄ žóįÍłįŽ•ľ ŽßĻŽ†¨ŪēėÍ≤Ć Ž∂Ąž∂úŪēėÍ≥† žěąžúľŽ©į, Ž∂Ąž∂úžěÖžěźÍįÄ ŽĄďžĚÄ žėĀžó≠žúľŽ°ú ŪôēžāįŽźėŽäĒ Í≤ɞ̥ ŪôēžĚłŪĖąŽč§. ŪÉźžā¨Ž•ľ žĘÖŽ£ĆŪēėÍ≥† ŪēīŽĮłŽěėÍįÄ žąėžÉĀžúľŽ°ú Ž∂ÄžÉĀŪē† ŽēĆ žēĹ 150m žĚīžÉĀ Í≥†ŽŹĄÍĻĆžßÄ žÉĀžäĻŪēú ŪõĄžóźŽŹĄ Í≤ÄžĚÄ žóįÍłįÍįÄ ÍīÄžł°ŽźźŽč§. ŪēīŽĮłŽěėŽäĒ žóīžąėŽ∂Ąž∂úÍ≥Ķ ž£ľžúĄŽ•ľ žÉĀŪēė-žĘĆžöįŽ°ú žĚīŽŹôŪēėŽ©į žėĀžÉĀžúľŽ°ú ÍłįŽ°ĚŪĖąžúľŽ©į, žóīžąėÍ≥Ķ žĄúžčĚ žÉĚŽ™Öž≤ī, žßÄžßą ŽįŹ Ūáīž†ĀŽ¨ľžóź ŽĆÄŪēú žėĀžÉĀžěźŽ£ĆŽ•ľ ž∑®ŽďĚŪĖąŽč§. žēĆŪā§žēą žóīžąėŽ∂Ąž∂úÍ≥Ķ Ūēīžó≠ŽŹĄ ÍįÄŪĆĆŽ•ł Í≤Ĺžā¨Ž©īžĚī Ž∂ąÍ∑úžĻôž†ĀžúľŽ°ú ž°īžě¨Ūēī Í≥†ŽŹĄŽ≥ÄŪôĒÍįÄ žč¨Ūēú žßÄžó≠žĚīŽĮÄŽ°ú, Í≥†ŽŹĄžč†Ūėł ŽįŹ žÜ掏Ąžč†Ūėł Í≥Ąžł°žĚÄ žł°ž†ē Ž∂ąÍįÄŪēú Í≤ĹžöįÍįÄ ŪŹ¨žľÄžä§Ūäł žßÄžó≠žóźžĄúžôÄ žú†žā¨Ūēú žąėž§ÄžúľŽ°ú ŽįúžÉĚŪĖąŽč§. žēĆŪā§žēą žóīžąėŽ∂Ąž∂úÍ≥Ķ ŪÉźžā¨žóźžĄúŽäĒ Ž≥ĄŽŹĄžĚė žÉėŪĒĆŽßĀ žěĎžó̥֞ žąėŪĖČŪēėžßÄ žēäžēėŽč§.
4. Í≤į Ž°†
Ž≥ł ŽÖľŽ¨łžĚÄ žč¨ŪēīŽ¨īžĚłžě†žąėž†ē ŪēīŽĮłŽěėŽ•ľ žĚīžö©Ūēú Žā®ŽßąŽ¶¨žēĄŽāė žēĄŪĀ¨ Ūēīž†ÄŪôĒžāįÍ≥ľ žóīžąėŽ∂Ąž∂úÍ≥Ķ ŪÉźžā¨žóź ÍīÄŪēú Í≤ÉžĚīŽč§. ŪÉźžā¨ŽäĒ 1,500m žąėžč¨žĚė ŪŹ¨žľÄžä§Ūäł Ūēīž†ÄŪôĒžāįÍ≥ľ 3,000m žąėžč¨žĚė ŪõĄžóīŽŹĄ Ūôēžě•ŽĆÄ žēĆŪā§žēą žóīžąėŪēīžó≠žóźžĄú žąėŪĖČŽźźŽč§. žĚīŽ≤ą ŪÉźžā¨Ž•ľ ŪÜĶŪēėžó¨, žßÄŪėē Ž≥ÄŪôĒÍįÄ žč¨Ūēú Ūēīž†ÄŪôĒžāį žßÄžó≠žóźžĄú žóīžąėŽ∂Ąž∂úÍ≥ĶžĚĄ žąėžÉČŪēėÍ≥†, žĻ®ž†ĄŽ¨ľ ŪŹ¨žßĎžě•žĻėžôÄ ŽĮłŽĀľžĖīŽß̞̥ žĄ§žĻėŪēėÍ≥† ŪöĆžąėŪēėŽäĒ žěĄŽ¨ī ŽďĪžĚĄ žĄĪÍ≥Ķž†ĀžúľŽ°ú žąėŪĖČŪē®žúľŽ°úžć® ŪēīŽĮłŽěėžĚė žöīŪē≠ž†úžĖī ŽįŹ ŪÉźžā¨žĄĪŽä•žĚĄ žěÖž¶ĚŪĖąŽč§. ŽėźŪēú žóīžąėžł°ž†ēžĚĄ žúĄŪēú Í≥†žė®žĄľžĄúŽ•ľ ÍįúŽįúŪĖąÍ≥†, HD žĻīŽ©ĒŽĚľŽ•ľ 3žĪĄŽĄźŽ°ú ŪôēŽĆÄŪēėžó¨ ŪēīŽĮłŽěėŽ•ľ žĚīžö©Ūēú žč¨ŪēīŪÉźžā¨Ž•ľ Ūö®Í≥ľž†ĀžúľŽ°ú žąėŪĖČŪē† žąė žěąŽäĒ ÍłįŽįėžĚĄ ŽßƎ吏óąŽč§. Žč§žąėžĚė HD žĻīŽ©ĒŽĚľŽ•ľ ÍįĀÍįĀ ž°įžĘÖŪēėžó¨ Ūēīž†ÄŪôėÍ≤Ş̥ Ž™®ŽčąŪĄįŽßĀŪēėÍ≥†, Žč§ÍįĀŽŹĄžóźžĄú žąėž§ĎžěĎžóÖ žÉĀŪô©žĚĄ žěÖž≤īž†ĀžúľŽ°ú ÍįźžčúŪē®žúľŽ°úžć® Ūö®žú®ž†ĀžĚł ŪÉźžā¨ÍįÄ žĚīŽ£®žĖīž°ĆŽč§. ŪēīŽĮłŽěėžĚė USBL žúĄžĻėž†ēŽįÄŽŹĄŽäĒ 1,500m žąėžč¨žóźžĄú žēĹ 4.5m ŪĎúž§ÄŪéłžį®Ž•ľ Ž≥īžėÄŽč§. DVL žč†ŪėłŽ•ľ Ž≥īž°įžĄľžĄúŽ°ú žĚīžö©ŪēėŽäĒ ŪēīŽĮłŽěė Ž≥ĶŪē©Ūē≠Ž≤ēžčúžä§ŪÖúžĚÄ ŽďúŽ¶¨ŪĒĄŪäłŪēėŽäĒ ŪäĻžĄĪžĚī žěąžúľŽĮÄŽ°ú, žĚīŽ≤ą ŪÉźžā¨žóźžĄú ž£ľÍłįž†ĀžúľŽ°ú ŽėźŽäĒ USBLÍ≥ľ Ūē≠Ž≤ēžčúžä§ŪÖúžĚė žÉĀŽĆÄžúĄžĻėžė§žį®ÍįÄ 20mŽ•ľ žīąÍ≥ľŪēėŽäĒ Í≤Ĺžöįžóź USBL žč†ŪėłŽ°ú Ūē≠Ž≤ēžčúžä§ŪÖúžĚė žúĄžĻėŽ•ľ Ž¶¨žÖčŪĖąŽč§. ŪĖ•ŪõĄ USBL žč†ŪėłŽ•ľ Ūē≠Ž≤ēžčúžä§ŪÖúžóź žúĶŪē©Ūēėžó¨ žēąž†ēŪēú žóįžÜć žúĄžĻėž†ēŽ≥īŽ•ľ ž†úÍ≥ĶŪēėŽäĒ Ž≥ĶŪē©Ūē≠Ž≤ē Íłįžą†ÍįúŽįúžĚī ŪēĄžöĒŪēėŽč§. ŪēīŽĮłŽěėŽ•ľ žĚīžö©Ūēú ž≤ę žč¨Ūēīžóīžąė ŪÉźžā¨Ž•ľ ŪÜĶŪēėžó¨ ŽĎź žßÄžó≠žóźžĄú žĄúŽ°ú Žč§Ž•ł žóīžąėŽ∂Ąž∂úÍ≥Ķžóź ŽĆÄŪēú žėĀžÉĀžěźŽ£ĆŽ•ľ žĖĽžóąÍ≥†, žóīžąėžÉĚŪÉúÍ≥Ą ž†ēŽįÄÍīÄžįį, žÉĚŽ¨ľ¬∑ÍīĎŽ¨ľ¬∑Ūáīž†ĀŽ¨ľ¬∑Ūēīžąė žčúŽ£Ć ž∑®ŽďĚ ŽďĪ Žč§žĖĎŪēú žĄĪÍ≥ľŽ•ľ žė¨Ž†łŽč§. žĚīŽ≤ą ŪÉźžā¨ŽäĒ žöįŽ¶¨ŽāėŽĚľ žě†žąėž†ēÍ≥ľ žóįÍĶ¨ž°įžā¨žĄ†žúľŽ°ú žöįŽ¶¨ŽāėŽĚľ Í≥ľŪēôžěźžôÄ Í≥ĶŪēôžěźÍįÄ ŪėĎŽŹôŪēėžó¨ žóīžąėŽ∂Ąž∂úÍ≥ĶžĚĄ žĄĪÍ≥Ķž†ĀžúľŽ°ú ŪÉźžā¨ŪĖąŽč§ŽäĒ Žćįžóź Í∑ł žĚėžĚėÍįÄ žěąŽč§. žēěžúľŽ°ú ŪēīŽĮłŽěėžĚė Ūôúžö© ÍłįŪöĆÍįÄ ŪôēŽĆÄŽź† Í≤ÉžúľŽ°ú žėąžÉĀŽźėŽ©į, žĚīžóź ŽĆÄŽĻĄŪēī žöīžö©ž†ĄŽčīžĚłŽ†• ŪôēŽ≥īžôÄ žú†žßÄÍīÄŽ¶¨ žĚłŪĒĄŽĚľžĚė ž°įÍłį ÍĶ¨ž∂ēžĚī ŪēĄžöĒŪēėŽč§. ŽėźŪēú Žč§žĖĎŪēú žč¨ŪēīŪÉźžā¨ žöĒÍĶ¨žóź ŽĆÄžĚĎŪēėŽäĒ ÍłįŽä•Ūôēžě•Í≥ľ žė®ŽąĄŽ¶¨Ūėł¬∑žĚīžā¨Ž∂ÄŪėł ŽďĪ žóįÍĶ¨žĄ† ŪäĻžĄĪžóź ŽĒįŽ•ł ŪäĻŪôĒŽźú žöīžö©Žį©žēąžĚī ÍįúŽįúŽźėžĖīžēľ ŪēúŽč§.




