제원 및 날개 끝 형상 변화에 따른 비대칭 전류고정날개 성능연구
Study on Performance of Asymmetric Pre-Swirl Stator according to Variations in Dimensions and Blade Tip Shape
Article information
Abstract
This paper reports a numerical method for determining the resistance and self-propulsion performance of an asymmetric pre-swirl stator used as an energy saving device by cancelling a propeller’s rotational energy. The present asymmetric pre-swirl stator propulsion system consists of three blades at the port and one blade at the starboard, which can effectively recover the biased rotating flow. This paper provides the design concept for the present asymmetric stator, which produces more efficient results than a conventional propeller.
1. 서 론
최근 전 세계적으로 지구환경 변화 문제 대한 관심이 커지면서 온실가스 배출저감 및 해양보호를 위한 제반 규제 강화와 안전 및 고효율 선박 수요에 대응하는 다양한 기술 개발이 전개되고 있는 가운데 국제해사기구(International Maritime Organization, IMO)에서는 2013년부터 신조되는 선박에 대하여 에너지 효율지수인 EEDI(Energy efficiency design index for new ships)를 제시하여 단계적으로 적용하도록 하고 있다. 이에 따라 선진 조선소 및 각국 연구소를 중심으로 EEDI를 감소시키기 위하여 에너지 저감 기술 연구가 활발히 진행되고 있다.
에너지 저감 기술은 선박 자체의 에너지 절감과 에너지 절감에 따른 CO2 배출량 저감을 동시에 노릴 수 있는 중요한 기술이다. 에너지 저감 장치는 프로펠러를 기준으로 선수 방향으로 Pre device, 프로펠러에 해당하는 Main device, 선미 방향으로 Post device로 분류할 수 있다. 대표적으로 Pre device에는 Pre-swirl stator(PSS), Pre-swirl duct(PSD), Duct형부가물, Fin형부가물 등이 효과가 있는 것으로 알려져 있으며, Main device로는 날개 끝 Rake propeller(TRP), Contra-rotating propeller(CRP), 등이 효과가 있는 것으로 알려져 있다. 또한, Post Device로는 Twisted rudder, Propeller-rudder, Rudder bulb & Fin 등이 효과가 있는 것으로 알려져 있다.
본 연구에서는 에너지 저감 장치 중 Pre-device로 비대칭 전류고정날개에 대한 연구이다. 비대칭 전류고정날개는 프로펠러에 의해 유기되는 접선 방향 속도의 반대 방향으로 유속성분을 주어 프로펠러 회전 시 발생하는 회전 에너지에 의한 손실을 보상해주는 장치이다. 비대칭 고정날개에 대한 연구는 1990년초부터 KRISO(Korea Research Institute of Ships & Ocean Engineering)를 중심으로 활발하게 진행되었다. 대칭형 전류고정날개의 성능해석을 위해 한 날개(key blade)에 대한 해석 기법을 발전시켜 전체 날개를 동시에 해석하는 비대칭 해석방법을 개발하였고 실험과의 비교 검증 연구를 수행하였다(Kim et al., 1993; Lee et al., 1992; Lee et al., 1994).
또한 KRSIO에서는 기존의 일본의 미츠비시(Mitsubishi)에서 개발된 좌우현 날개수가 대칭형인 형태에서 좌우현 날개수가 서로 다른 비대칭형으로 연구 개발되었다. Kang, et al.(2004) 은 VLCC(Very large crude oil carrier)에 비대칭 전류고정날개를 적용하여 약 5.6% 효율 증가의 결과를 보여 주었다. 그러나 주로 저속 비대선의 대해서만 적용되었고 상선 중 상대적으로 속도가 빠른 컨테이너선에 대해서는 적용 사례가 많지 않다. 또한 현재 운용되어지고 있는 고정날개의 설계의 용이함과 제작비용을 고려하여 결정되어진 반경별 피치각이 고정되어 있는 일정 피치각형이기 때문에 반경별 부하량이 다르게 되어 날개 끝에서의 보텍스 등의 영향으로 자체 날개 진동을 유발 할 수 있으며 또한 날개 끝 보텍스가 프로펠러나 타에 영향을 줄 수 있다. 따라서 본 연구에서는 2가지 연구를 수행하여 성능을 확인하였다. 첫째로, 컨테이너선용 비대칭 전류고정날개의 최적화를 위해서 코드길이 변화에 따라 비대칭 전류고정날개를 설계하고 CFD(Computational fluid dynamics)를 사용하여 저항 및 자항 성능을 확인 하였다. 둘째로 앞서 최적화된 비대칭고정날개를 토대로 앞서 날개 끝에서의 보텍스 문제를 개선하기 위해서 날개 끝 형상을 Rounding 설계 하고 CFD를 통하여 성능을 확인하였다.
2. 비대칭 전류고정날개 설계
2.1 설계이론
비대칭 전류고정날개 설계를 위해 양력면 이론에 의한 프로펠러와 전류고정날개의 상호 유기 속도를 고려하여 반 복 계산하는 방법을 사용 하였으며, 일련의 계산 과정을 프로그램화 한 PASTA(Preswirl asymmetric stator analysis) 프로그램을 사용하였다. PASTA 프로그램은 반류시험을 수행하여 얻은 반류를 토대로 최적 고정날개 설계를 위한 것으로 KRISO에서 수행된 연구에 의해서 개발 되어진 프로그램이다(Lee et al., 1992).
불균일 반류 중에서 고정날개의 피치각이 각 날개 별로 동일할 경우 축 방향 성분 의 불균일도 뿐만 아니라 접선방향의 속도가 고정날개 입장에서 좌현과 우현에서 반대방향으로 나타나 각 날개에 걸리는 부하가 크게 달라지므로 고정 날개의 위치별 피치각도를 잘 조절해 주지 않으면 최대 효율을 얻어내기가 힘들다. 날개에 대한 축 방향 속도 성분 vx 와 vR 반경방향 속도, 접선방향 속도 성분 vt 은 다음 Fig. 1과 같다.
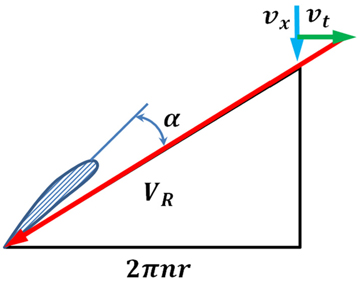
Velocity components at the blade section
비대칭 전류고정날개가 추진기 앞에 놓인 경우에 고정날개를 설계하기 위하여 변수들을 조절하게 되면 각각의 고정날개의 반경별 순환 분포(Circulation distribution)가 달라진다. Г는 순환 세기로서 날개에 걸리는 부하를 간접적으로 표현하기 때문에 이 값을 가지고 성능을 비교하게 된다. Г를 상대적으로 비교하기 위해 고정날개의 반경(R)과 설계속도(Vs)를 이용하여 식 (1)같이 무차원화 하였다.

그리고 Г를 이에 상응하는 등가 받음각(αequiv., Equivalent angle of attack)으로 표현하여 조금 더 직관적인 분석이 가능하도록 하였다. Kutta-Joukowski 정리에 따르면 순환유동에서 양력은 식 (2)와 같이 표현되며 양력계수는 식 (3)과 같다.


여기서 L, CL, c, V은 각각 2차원 단면에 대한 양력과 양력계수, 2차원 단면의 코드 그리고 유입속도를 나타낸다.
식 (3)을 등가입사각에 대한 식으로 변환하고, 식 (1)을 대입하여 나타내면 다음과 같다.

위의 식을 통해 각 고정날개의 반경별 단면에 걸리는 Г, 즉 간접적인 부하량을 유입류에 대한 받음각으로 표현하여 나타낼 수 있다.이에 따라 각 날개의 반경별 부하량을 좀 더 가시적으로 파악 할 수 있도록 등가 입사각(αequi. : Equivalent angle of attack)으로 치환하여 표시하였다(Lee et al., 2016).
위와 같은 해석 과정에서 각 날개에 대한 날개 번호 부여는 Fig. 2와 같다.
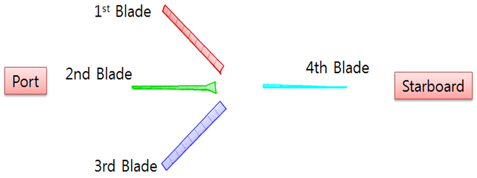
Definition of blade number on looking upstream
2.2 제원 변화에 따른 설계
본 연구의 대상선은 KCS(KRISO container ship) 선형으로 자세한 제원은 다음 Table 1과 같다.
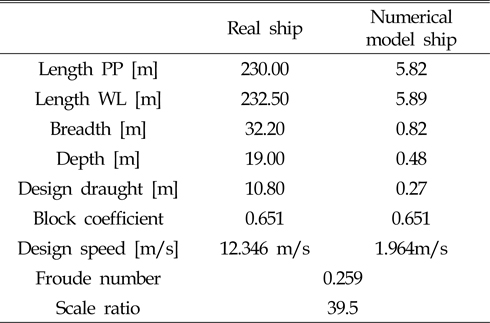
Principal particulars of ship
컨테이너선은 다른 상선과 달리 선형이 날렵하고 선미로 들어오는 유속이 빠르기 때문에 비대칭 고정날개의 코드 길이 및 피치각이 크면 과도한 저항 증가로 인해서, 자항 성능 개선을 포함하더라도 전체적인 효율 향상은 기대하기가 힘들다. 또한 날개 이론에서는 코드길이와 캠버에 대해서는 다음과 식 (5)가 만족된다.

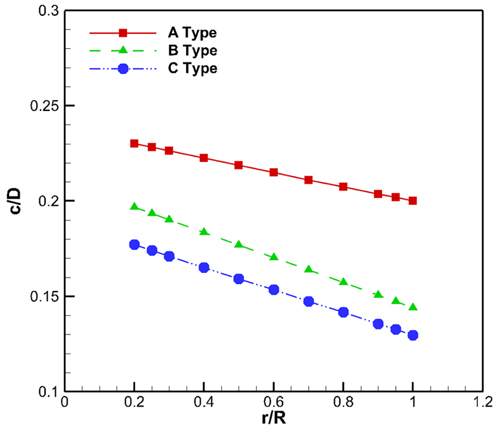
여기서 f0 는 캠버이며, c는 코드, CL 은 양력이다. 식 (5)를 보면 캠버가 클수록 양력이 커지지만 과도하게 커지면 날개에서의 보텍스 발생과 제작상에 문제가 발생한다. 또한 코드길이가 클수록 양력이 작게 되고 향력이 증가 되며, 부하량을 만족하기 위해서는 피치각이 커져서 과도한 저항증가가 발생하기 때문에 적절한 캠버-코드비 요구된다. 이에 따라 부가물 부착으로 인한 저항을 최소화 시키고, 추진효율을 극대화시키기 위하여 캠버는 고정변수로 두고 코드 길이 변화에 따라 A부터 C Type까지 3가지 타입의 비대칭 고정날개를 설계 하였다. A Type은 선행연구 Kwon(2013)에서 모형시험으로 성능을 확인한 비대칭 고정날개로, A Type을 기준으로 설계를 진행하였다. A Type 비대칭 고정날개는 선행연구에서 과도한 저항 증가를 확인하여 전체적으로 반경별 코드길이를 줄이고, 허브 쪽 반경(0.2R)에서 날개 끝(1.0R) 까지 코드길이의 분포를 수정하여 B Type을 설계 하였다. C Type은 B Type을 기준으로 분포는 유지 하면서 반경별 코드길이를 약 11% 줄여서 최종 C Type을 설계 하였다. A부터 C Type에 대한 자세한 제원은 다음 Table 2~5와 같으며, Type에 따른 반경별 코드길이 분포를 직경으로 무차원화 하여 다음 Fig. 3에 비교 하였다. 여기서, r/R은 무차원 반경으로 프로펠러의 반지름(R)에 대한 날개의 반경(r)을 말한다.

Principal particulars of pre-swirl stator

Geometry of C type pre-swirl stator
Comparison of radial distribution on chord/diameter according to stator types

Geometry of A type pre-swirl stator

Geometry of B type pre-swirl stator
각 Type별 비대칭 고정날개의 설계는 앞서 설명한 Stator의 반경 별 등가입사각을 바탕으로 설계 하였고, 각 Type별 등가입사각의 분포는 Fig. 4과 같다. 여기서 반경 별 등가입사각은 Stator에 가해지는 부하 분포를 나타낸다.
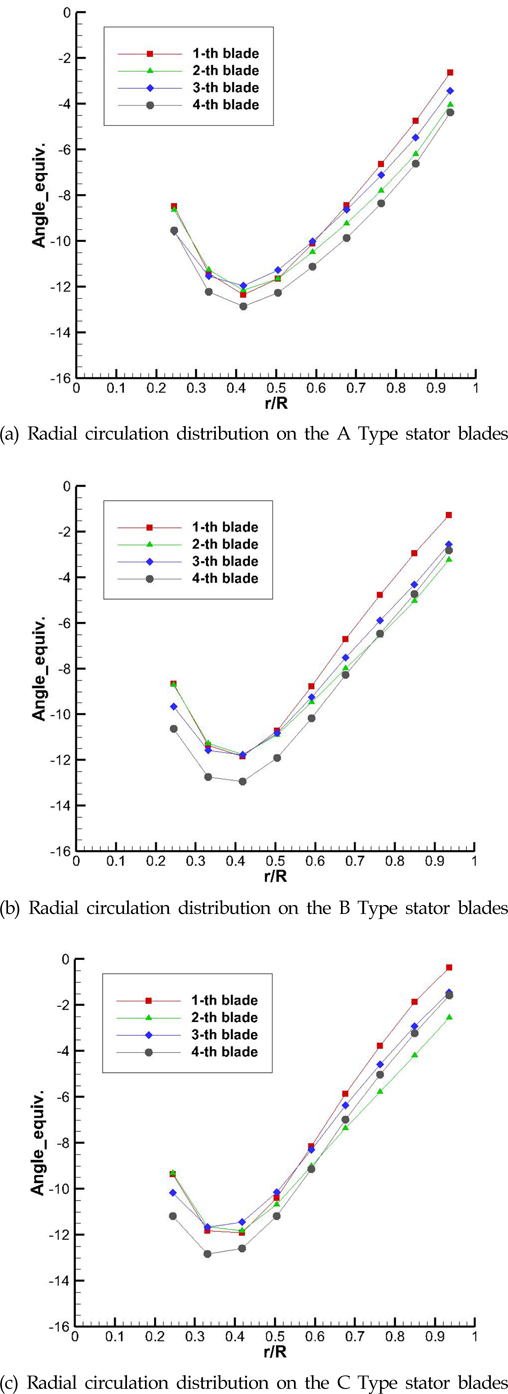
Radial circulation distribution each type stator blades
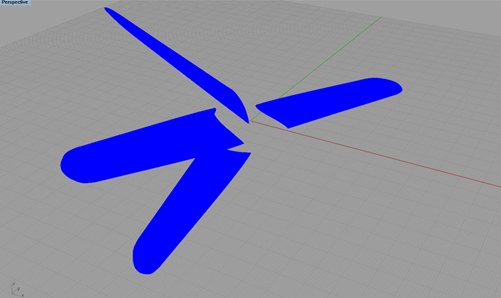
피치각이 커지면 Stator에 들어오는 유입류의 등가입사각이 커지게 되고 가해지는 부하도 증가하게 된다. Stator에 가해지는 부하가 클수록 자항 성능의 개선이 많이 이루어지지만 그만큼 피치각도 크기 때문에 저항의 증가도 같이 동반하게 된다. 선행 연구에서는 일반적으로 저속 비대선에 Stator를 부착할 경우 등가입사각을 -13° ~ -14°에 위치시키도록 피치각을 설계하는 것이 추진 효율의 향상이 가장 큰 것으로 확인 하였지만 본 연구의 대상선인 컨테이너선은 피치각이 크면 저항이 과도하게 증가되기 때문에 저속 비대선에 적용되어지는 등가입사각보다 좀 더 작은 -12°에 맞추어 설계하였다. 또한 Kwon(2013)에서 A Type 설계는 등가 입사각을 -12°에 맞추어 설계하였기 때문에 동일한 입사각에서 각 Type의 비대칭고정날개를 설계 하였다. 타입에 따른 날개별 피치각은 다음 Table 6과 같고, 최종 모델링은 Fig. 5와 같다.
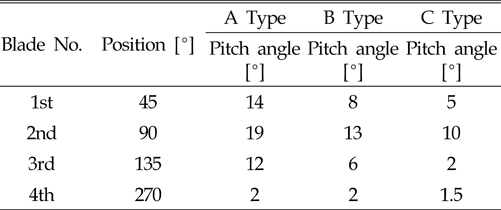
Comparison of pitch angle according to stator type
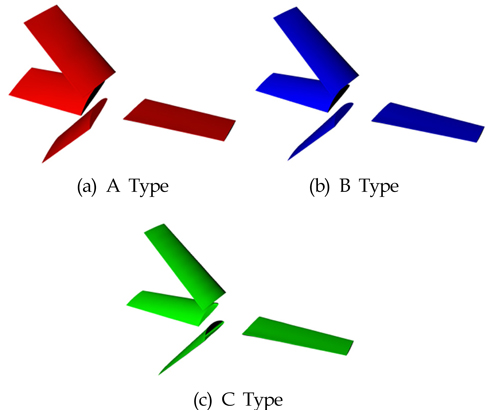
3D Modeling according to stator type
3. 수치해석
수치해석 상용 프로그램인 STAR-CCM+(v9.04)을 이용하여 앞서 설계 한 비대칭 고정날개의 A~C Type의 부착 여부에 따라 저항 및 자항 성능을 확인하였다. 저항성능에서는 부가물 부착여부에 따라 알몸선체(Bare hull) 대비 모형의 전 저항 RTM (Total resistance at model scale) 증가가 3% 이하가 되는 것을 목표로 하였다. 자항성능에서는 자항점에서의 전달동력(2πnMQM)으로 성능을 확인하여 본 대상선인 KCS 선형에 최적 비대칭 고정날개를 결정하였다.
3.1 대상선 제원
수치해석의 대상선은 3600TEU KRISO container ship 선형으로 부산대학교 수조 크기를 고려하여 축척비 39.5에 맞게 구성하였고, 모형 설계 속도는 1.964m/s이다.
3.2 지배방정식
본 연구에서는 비정상상태(Unsteady), 비압축성(Incompressible), 점성(Viscous) 유동을 고려한 RANS(Reynolds-averged Navier-Stokes)방정식을 사용하였고 다음의 식으로 표현한다.


여기서 ui 는 속도, p는 압력, t는 시간, ρ는 밀도, μ는 점성계수,  레이놀즈 응력(Reynolds stress)을 나타낸다.
레이놀즈 응력(Reynolds stress)을 나타낸다.
3.3 수치해석 방법
속도 압력 연성은 SIMPLE(Semi-implicit method for pressure-linked equations consistent) 알고리즘을 사용하였고, 난류모델을 Realizable k-ε 모델을 사용하였다. 자세한 해석 조건은 다음 Table 7과 같다.
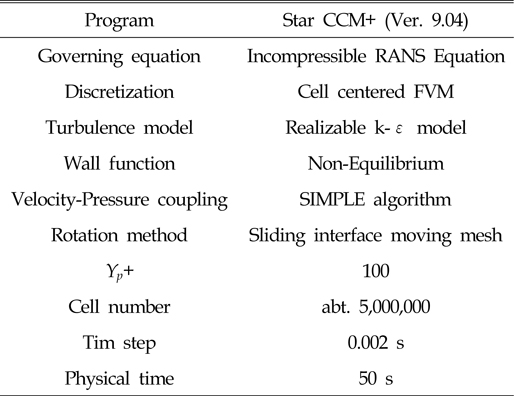
Analysis conditions
3.4 경계조건 및 격자계
본 연구에서 적용된 경계조건은 다음 Fig. 6과 같으며, 입구영역과 외부경계영역에서 Velocity inlet 조건을 사용하였으며, 출구영역에서는 Pressure outlet 조건을 사용하였다. 수치해석에서 사용된 계산영역은 중앙 평형부 기점으로 하여 유체가 들어오는 입구 영역에서 유체가 빠져나가는 출구영역까지의 거리는 -1.5 ≤X/L ≤3.0이며, 선박 좌우측 외부경계까지는 -1.5 ≤Y/L ≤1.5, 선박의 상부와 하부의 외부경계영역까지는 -1.5 ≤Z/L ≤1.5이다.

Boundary conditions
격자계는 Star CCM+에서 제공하는 자동 격자 생성을 이용하여 Trimmer 격자로 구성하였으며, 선체주위는 약 330만개 프로펠러는 약 170만개의 격자를 사용하여 계산을 수행하였고 다음 Fig. 7과 같다.
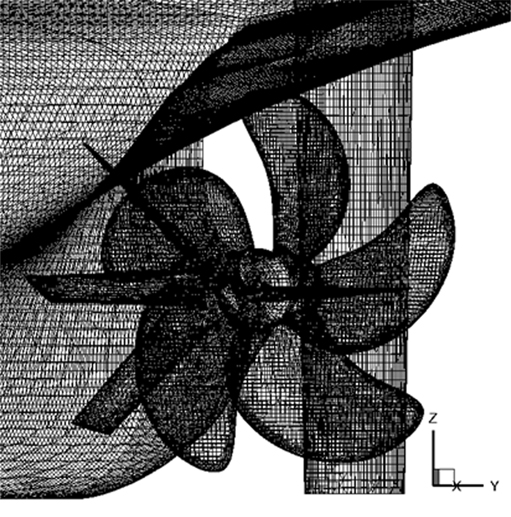
View of grid generation propeller and pre-swirl stator
자유수면 유동 해석 기법으로는 활발히 사용되고 있는 VOF(Volume of fluid) 기법을 사용하였다. VOF법의 경우 선박의 조파문제(Wave making problem)를 비롯하여 해양구조물과 관련된 복잡한 비선형 자유수면 유동해석에 있어 타당한 해의 신뢰도를 가지는 강건한(Robust) 방법으로 알려져 있다(Park, 2015).
4. 수치해석 결과
4.1 저항성능
저항성능에서는 부가물의 부착여부에 따라 모형의 전 저항 RTM (Total resistance at model scale) 증가가 3% 이상이 되지 않는 것을 목표를 두었다. 이는 선행연구에서 컨테이너선, 벌크선, 탱커선, LNG 선등 다양한 선종에 비대칭 고정날개에 대한 연구를 수행하였으며, 이런 경험을 토대로 RTM 이 3% 이상 증가가 될 경우 실선의 저항 유효마력(Effective horse power, EHP) 추정 시 약 5% 이상 과도한 저항 증가로 추진효율을 얻지 못하기 때문이다. 이에 따라 Table 8에서는 수치해석으로부터 계산된 모형선의 크기의 전 저항 값(RTM )을 이용하여 ITTC (1978)에서 제시된 2차원 해석법에 의해 실선 크기에서의 유효마력(EHP)을 추정하였다.
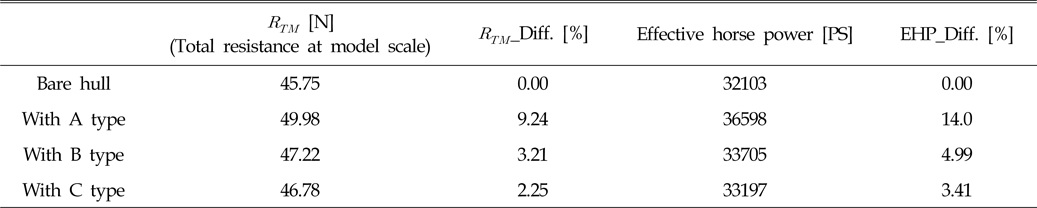
Comparison of resistance according to stator using CFD
비대칭 고정날개 부착 시, 일반적으로 저항 증가의 요인은 알몸선체(Bare Hull) 대비 Stator의 침수 표면적 증가, 날개 끝에서의 보텍스, 피치각으로 인한 저항 증가로 볼 수 있다. 상대적으로 상선 중 빠른 컨테이너선 같은 경우 일반 벌크선, 탱커선 대비 선미가 날렵하여 빠른 유속으로 인해 부착되는 부가물의 침수표면적 및 피치각에 대해 저항 증가가 민감하다. 이에 따라 상대적으로 코드길이 및 피치각이 작은 C Type 비대칭 고정날개가 저항 측면에서 유리한 것으로 판단된다.
4.2 자항성능
최종적으로 저항 증가가 3% 이하인 C type을 선정하여 자항 성능을 확인하였다. 자항 해석시 프로펠러 회전 모사는 Sliding mesh를 사용하였고, 흡입면과 압력면 등 프로펠러 주위는 Interface 처리하였다. 계산 시간 간격(Time step)은 0.002초를 적용하여 총 50초까지 계산을 수행하였다. 매 시간 간격에서 5회의 내부 계산을 반복하였다. 또한 성능을 비교하기 위해 Choi et al.(2009)이 제시한 해석법을 참고하였다. 2개의 프로펠러 회전속도에 대한 해석 결과를 이용하여 자항점(Self-propulsion point)에서 모형의 전 저항  , 추력 TM , 토크 QM , 회전수 nM 값을 구하였다. 여기서, 비대칭 고정날개 부착여부에 따라 예인력 TF 값에 침수표면적을 고려하여 사용하였다. 성능 비교를 위해 모형선의 전달동력 PDM 를 구하며, 다음 식을 통해 구한다.
, 추력 TM , 토크 QM , 회전수 nM 값을 구하였다. 여기서, 비대칭 고정날개 부착여부에 따라 예인력 TF 값에 침수표면적을 고려하여 사용하였다. 성능 비교를 위해 모형선의 전달동력 PDM 를 구하며, 다음 식을 통해 구한다.


또한 Table 9에서는 수치해석을 이용하여 얻은 추력, 토크, 회 전수를 이용하여 실선의 전달동력(Delivery horse power, DHP)을 추정하였다. 일반적으로 ITTC 1978 실선 확장법 표준방법으로 사용되고 있으나, 전류 고정형 부가물이 선박에 장착되어 있는 경우, 추진기 주위의 유동은 통상적인 선체-추진기 사이의 유동특성과는 달라지기 때문에 고정날개의 영향을 고려하기 위해서 ITTC(1999)방법을 사용한다. 위 2가지 방법은 실선의 반류 추정에서 차이가 나며 각각의 실선 반류 추정식은 다음과 같다.

Comparison of self-propulsion performance using CFD


식 (11)은 ITTC 1999 방법으로 기존의 ITTC 1978 방법 식 (10)에서 모형선의 유효반류 계수의 차이만큼을 더해 주는 것을 확인 할 수 있다. 이는 전류고정날개에 의해 변하게 되는 반류는 포텐셜의 영향이 지배적이기 때문이라고 가정하게 되고, 전류고정날개를 장착한 후 유효반류의 변화량을 실선으로 그대로 가져오게 되기 때문이다(Lee et al., 2016).
비대칭 고정날개가 추진기 앞에 놓인 경우에는 부가물에 의한 접선방향 유기속도 와 축방향 유기속도로 인해 상대속도가 바뀌게 된다. 이 때 입사각이 증가 되므로, 작은 회전속도에도 같은 추력을 가지게 되어 프로펠러 회전속도(nM) 감소 및 토크(QM)의 감소로 인해서 모형 및 실선 추정에서 4% 이상의 효율증가가 된 것으로 판단된다.
5. 날개 끝 형상 변화에 따른 설계 및 해석 결과
본 연구에서는 컨테이너선에 대한 비대칭 고정날개의 최적 설계뿐만 아니라 비대칭 고정날개의 날개 끝에서의 Vortex 개선을 위한 날개 끝 형상에 따라 설계를 수행하였다. 앞서 최적 설계를 한 C type에 대해 날개 끝 Rounding 처리를 하였다. 날개 끝 Rounding에는 기본적인 타원방정식을 이용하였다.

Fig. 8과 같이, 장축 b를 Stator의 길이로 고정하고 Rounding이 시작되는 반경의 위치를 단축 a로 정하였다. 여기서 x는 코드 길이, y는 Stator 반경을 말한다. 본 연구에서 Rounding 시작점이 0.95R, 0.9R 되는 2가지 타입의 비대칭 고정날개를 설계하였고, 최종 모델링 형상은 Fig. 9~10과 같다. 또한 위와 같은 동일한 수치해석 기법을 이용하여 저항 및 자항 성능에 대한 상대비교를 수행하였다.
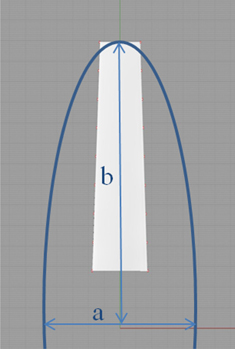
Definition of rounding design
0.95R type stator 3D modeling
0.9R type stator 3D modeling
저항 및 자항 결과는 Table 10~11에 정리하였으며, 비대칭고정날개 부착으로 인한 알몸선체(Bare hull)에 비해 저항은 증가하였지만, C Type과 비교하였을 때 날개 끝에서 Rounding 처리한 고정날개가 약 0.3% 저항 측면에서 유리 한 것으로 확인되었다. 이는 날개 끝에 형상이 일반 고정날개보다 유선형으로 인해 형상 저항 측면에서 유리한 것으로 판단된다.

Comparison of resistance according to rounding stator type using CFD
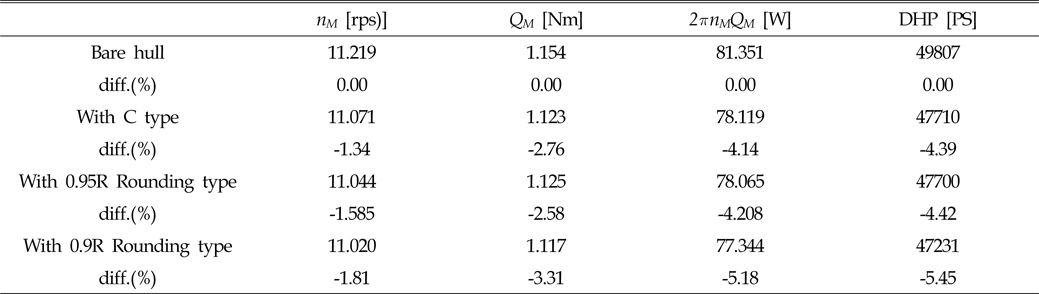
Comparison of self-propulsion performance according to rounding stator type using CFD
또한 날개 끝에서 압력계수(Cp)를 다음 Fig. 11에 비교하였다. 압력계수는 동압 에 대한 압력비(P−P∞ )로 다음 식 (13)과 같이 정의된다.
에 대한 압력비(P−P∞ )로 다음 식 (13)과 같이 정의된다.
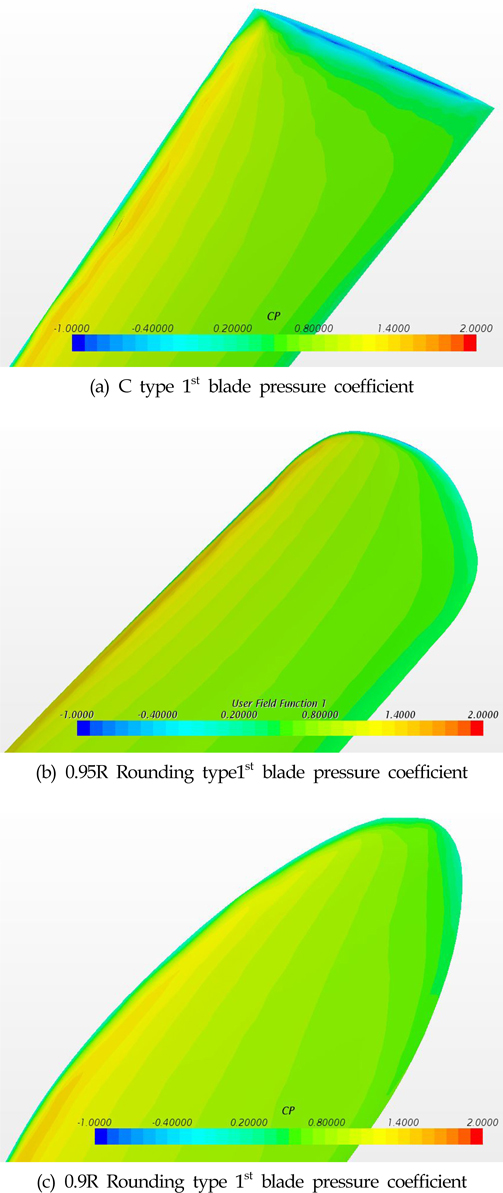
Comparison of pressure distribution

압력계수( Cp ) 값을 비교한 결과, C Type의 비대칭 고정날개가 앞날(Leading edge) 및 날개 끝 부분에서 압력 분포 차이가 Rounding type의 비대칭 고정날개보다 큰 것을 확인 할 수 있으며, 또한 0.95R Rounding type이 0.9R Rounding type 보다 앞날이나, 날개 끝에서 압력 분포 차이가 크기 때문에 0.9R Rounding type이 최종적으로 효율증가가 가장 큰 것으로 판단된다. 추후 부가물을 제작하여 모형시험으로 성능을 검증할 예정이다.
6. 결 론
본 논문에서는 3600TEU 컨테이너선에 대한 비대칭 고정날개의 최적화를 위하여 제원 변화(코드)에 따라 설계를 하였고 저항증가 3% 이하인 비대칭 고정날개를 최종 자항 성능을 확인하였다. 또한 최종 선정된 비대칭 고정날개의 끝에서 보텍스 개선을 위해서 Rounding 설계를 하였고 최종 CFD를 이용하여 성능을 확인 하였다. 이로부터 다음의 결론을 얻을 수 있다.
(1) 대상선종이 컨테이너선과 같이 운항속도가 빠른 선종에서는 비대칭고정날개의 코드(Chord) 길이 및 피치각이 크면 과도한 저항 증가를 야기하기 때문에 Compact하게 설계를 해야 한다.
(2) 일반적으로 부가물 부착 여부에 따라 모형의 전 저항(RTM) 증가가 3% 이하가 되어야 하며, 본 연구에서는 C type 비대칭 고정날개의 부착 여부에 따라 수치해석을 통하여 얻은 결과를 가지고 모형간의 상대 비교 및 실선 확장을 하여 최종 성능을 확인한바, 모형의 전 저항(RTM) 2.25%, 유효마력(EHP) 3.41% 증가를 보였고, 추진 효율은 모형에서 전달동력(2πnMQM)은 약 4.1% , 실선 전달동력(DHP)은 약 4.4% 효율 증가를 보였다.
(3) 또한, 날개 끝 vortex 개선을 위하여 C type 비대칭고정날개 끝에 타원방정식을 적용하여 Rounding 시작점이 0.95R 0.9R이 되는 지점에 대하여 저항 및 자항 해석을 수행하고, 날개 끝에서의 압력분포를 확인하였다. 그 결과 Rounding 0.9R type이 약 5.1% 효율 증가를 보였다. 이는 날개 끝에서의 압력분포 차이로 인한 Vortex가 감소가 되면서 기존 C type보다 약 1% 효율 향상이 된 것으로 판단된다.
(4) 추후, 부가물 모형제작을 통해 부가물 부착 여부에 따라 모형시험으로 성능을 검증할 예정이며, 강도상의 문제도 검토할 예정이다.
Acknowledgements
이 논문은 부산대학교 기본연구지원사업(2년)에 의하여 연구되었음.
References
Choi, J.E., Kim, J.H., Lee, H.G., Choi, B.J., Lee, D.H., 2009. Computational Prediction of Ship-speed Performance. Journal of Maritime Science and Technology, 14(3), 322-333.
Choi J.E., Kim J.H., Lee H.G., Choi B.J., Lee D.H.. Computational Prediction of Ship-speed Performance. Journal of Maritime Science and Technology 2009;14(3):322–333. 10.1007/s00773-009-0047-4.Kang, Y.D., Kim, M.C., Chun, H.H., 2004. A Study on the Design of a Biased Asymmetric Pre-swirl Stator Propulsion System. Journal of the Society of Naval Architects of Korea, 44(3), 13-21.
Kang Y.D., Kim M.C., Chun H.H.. A Study on the Design of a Biased Asymmetric Pre-swirl Stator Propulsion System. Journal of the Society of Naval Architects of Korea 2004;44(3):13–21.Kim, M.C., Lee, J.T., Suh, J.C., Kim, H.C., 1993. A study on the Asymmetric Preswirl Stator System. Journal of the Society of Naval Architects of Korea, 30(1), 30-44.
Kim M.C., Lee J.T., Suh J.C., Kim H.C.. A study on the Asymmetric Preswirl Stator System. Journal of the Society of Naval Architects of Korea 1993;30(1):30–44.Kwon, J.I., 2013. A Study on the Biased Asymmetric Pre-swirl Stator For a Container Ship. Master’s Thesis, Pusan National University, Korea.
Kwon J.I.. A Study on the Biased Asymmetric Pre-swirl Stator For a Container Ship. Master’s Thesis Pusan National University; Korea: 2013.ITTC, 1978. ITTC Performance Prediction Method. Section. 7. 5-02-03-01.4, Effective Date 2014, Revision 03.
ITTC Performance Prediction Method Revision 03th ed. 1978. Effective Date 2014. Section. 7. 5-02-03-01.4.ITTC, 1999. Specialist Committee on Unconventional Propulsion. 22nd ITTC, Seoul, Korea.
Specialist Committee on Unconventional Propulsion In : 22nd ITTC. Seoul, Korea; 1999.Lee, J.T., Kim, M.C., Suh, J.C., Kim, S.H., Choi, J.K., 1992. Development of Preswirl Stator-Propeller System for Improvement of Propulsion Efficiency : a Symmetric Stator Propulsion System. Journal of the Society of Naval Architects of Korea, 41(3), 13-21.
Lee J.T., Kim M.C., Suh J.C., Kim S.H., Choi J.K.. Development of Preswirl Stator-Propeller System for Improvement of Propulsion Efficiency : a Symmetric Stator Propulsion System. Journal of the Society of Naval Architects of Korea 1992;41(3):13–21.Lee, J.T., Kim, M.C., Van, S.H., Kim, K.S., Kim, H.C., 1994. Development of a Preswirl Stator Propulsion System for a 300K VLCC. Journal of the Society of Naval Architects of Korea, 31(1), 1-13.
Lee J.T., Kim M.C., Van S.H., Kim K.S., Kim H.C.. Development of a Preswirl Stator Propulsion System for a 300K VLCC. Journal of the Society of Naval Architects of Korea 1994;31(1):1–13.Lee, C.M., Shin, Y.J., Kim, M.C., Choi, J.E., Chun, H.H., 2016. Design of asymmetric pre-swirl stator for LNG carrier according to variation of stator shapes. Journal of the Society of Naval Architects of Korea, 53(1), 37-44.
Lee C.M., Shin Y.J., Kim M.C., Choi J.E., Chun H.H.. Design of asymmetric pre-swirl stator for LNG carrier according to variation of stator shapes. Journal of the Society of Naval Architects of Korea 2016;53(1):37–44. 10.3744/SNAK.2016.53.1.37.Park, I.R., 2015. A Volume of Fluid Method for Free Surface Flows around Ship Hulls. Journal of Computational Fluids Engineering, 20(1), 57-64.
Park I.R.. A Volume of Fluid Method for Free Surface Flows around Ship Hulls. Journal of Computational Fluids Engineering 2015;20(1):57–64. 10.6112/kscfe.2015.20.1.057.