Motion Response Characteristics of Small Fishing Vessels of Different Sizes among Regular Waves
Article information

Abstract
The motion of small fishing vessels is significantly affected by small waves, leading to accidents, such as capsizing or sinking. This paper presents the results of two types of basin tests. The first test analyzed the characteristics of roll and pitch motions among regular waves with the same wave steepness using the drifting state of three (3G/T, 7G/T, 10G/T) small fishing vessels. The second test analyzed the motion characteristics of the 7G/T fishing vessel under different wave steepness. The first test showed that heave and roll motions are significant in the beam sea, while pitch motion is significant in the bow and stern seas. The second test shows that wave steepness has a linear relationship with roll and pitch motions in the bow and stern seas.
1. Introduction
The number of vessels involved in marine accidents is increasing every year, with fishing vessel accidents accounting for 80% of all vessel accidents. Small fishing vessels refer to fishing vessels with a gross tonnage of fewer than 10 tons, and accidents involving small fishing vessels account for 71% of all fishing vessel accidents (Korea Maritime Safety Tribunal, 2021; Ministry of Oceans and Fisheries, 2020). Small fishing vessels are significantly affected even by small waves, leading to accidents, such as capsizing or sinking.
Meanwhile, domestic small fishing vessels are mainly built in small or medium-sized shipyards. Accordingly, they are built based on an existing mother vessel, relying on experience rather than using systematic procedures. Under this circumstance, it is difficult to conduct studies on hull forms to increase the efficiency of resistance performance and motion performance for small fishing vessels. Recently, more studies have been conducted on fishing vessels. However, most of these studies were focused on the operability, convenience, and speed of fishing vessels (Yu et al., 2010; Park et al., 2016a; Seok et al., 2018). In the case of small fishing vessels, the position of the transverse metacentric height changes frequently based on the fishing operation environment, affecting vessel stability, which is closely related to the roll motion of the vessel. Methods for analyzing the stability include numerical analysis, computational fluid dynamics analysis, experiments, and real ship tests. Im and Lee (2021) utilized computational fluid dynamics to analyze the motion response characteristics of small fishing vessels in regular waves based on the size of the fishing vessel and verified that the maximum value of the motion response moves to the long-wavelength region as the vessel speed increases in bow sea conditions, regardless of the size of the vessel. An experimental study on the motion response characteristics of small fishing vessels wavesteepness inclines in beam sea conditions verified that if only the resistance characteristics are considered for the chine line shape in the design of the hull of the vessel, the motion performance of the vessel can be degraded when it is damaged. In addition, it was confirmed that the position of the chine line shape significantly impacts vessel motion (Park et al., 2011). An analysis of seakeeping performance using multi-purpose fishing training vessels analyzed the performance of tasks under each sea condition and presented guidelines on adjusting the wave encounter angle an avoidance or changing the course of the vessel based on the sea condition (Ryu et al., 2019). The roll motion characteristics of a small fishing vessel were analyzed based on the change in the wave encounter angle and speed of the small fishing vessel. Although the roll motion response rapidly increased in a beam sea or stern sea, a real ship test verified that the motion period does not change much because of the wave direction (Kang et al., 2007). The hull response characteristics of a stern-type trawler were measured according to wavesteepnes and wave direction via a real ship test when the trawler was drifting, sailing, and trawling. When the trawler was drifting, the maximum and significant values of the angle of roll motion increased as the wave height increased. However, both the maximum and significant values of the angle of pitch motion decreased (Park et al., 2016b).
In this study, we conduct a tank test experiment by simulating the drifting state of three small fishing vessels. First, we analyze the roll and pitch motion characteristics of these vessels in regular waves with uniform wave steepness. Then, we compare the characteristics of each fishing vessel with each other to present foundational data for the development of fishing vessels in terms of seakeeping performance. In addition, we analyze the roll and pitch motion characteristics of a 7-ton fishing vessel in a bow sea and a stern sea based on wave steepness to verify whether these characteristics increase linearly.
2. Experiment Methodology
2.1 Description of Setup and Model
Considering small fishing vessels account for 71% of recent fishing vessel accidents, we selected three sizes of fishing vessels under 10 tons, including a 3-ton (2.99), 7-ton (7.93), and 10-ton (9.77) class vessels, to analyze the response characteristics of small fishing vessels in regular waves (Im and Lee, 2021). Table 1 and Fig. 1 show the specifications and front view diagrams of the selected fishing vessels, respectively. Table 2 and Fig. 2 show the specifications and pictures of the model vessels used in the experiment, respectively. In addition, the scale ratios of the model vessels are 8.65 for the 3-ton class vessel, 9.46 for the 7-ton class vessel, and 11 for the 10-ton class vessel.
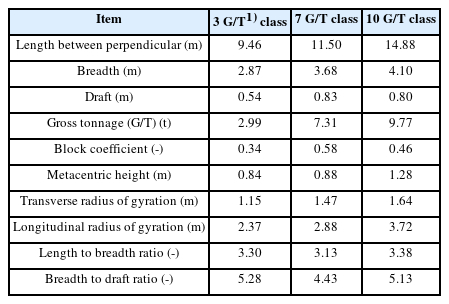
Specifications of small fishing vessels
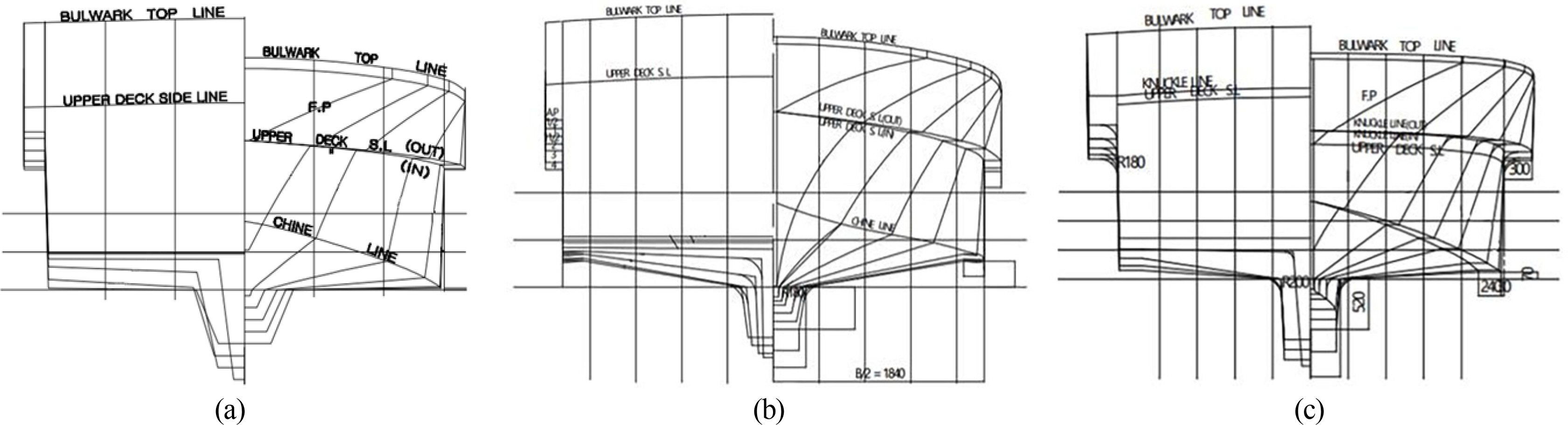
Body plan: (a) 3 G/T class, (b) 7 G/T class, (c) 10 G/T class
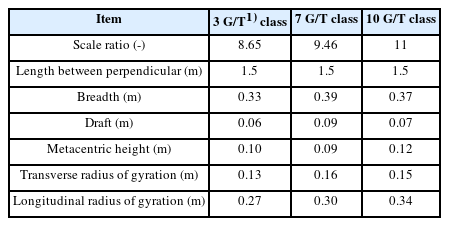
Specifications of the experimental models

Picture of experiment models (From the left, 3 G/T class, 7 G/T class, 10 G/T class)
2.2 Experimental Setup
The model experiment was conducted in the ocean engineering basin with a dimension of 28 × 22 × 2 m at the Research Institute of Medium and Small Shipbuilding (RIMS). The wave maker consisted of a system with a total length of 22.0 m, including 40 segments, a height of 1.0 m, and a width of 0.4 m. Moreover, wave absorber was installed on the opposite side of the wave maker to absorb incoming waves and prevent wave reflections at the boundary of the wave basin and to achieve interaction between the floating object and the wave by adjusting the infinite range of the fluid. The fishing vessel was located in the center of the basin, as shown in Fig. 3. To facilitate this study, the origin was located at the position of the wave maker at a constant water level. In addition, the coordinate system was designated by setting the horizontal direction of the wave maker as the x-coordinates and the positive numbers of the wave propagation direction as the y-coordinates. The four-point mooring was used with springs with a natural period greater than twice the maximum period of the model vessel to prevent the model vessel from being pushed away by waves. As a result, the springs did not affect the movement of the model vessel. In addition, the springs were fixed at the vertical center of gravity of the bow and stern to prevent the effect of the mooring point.
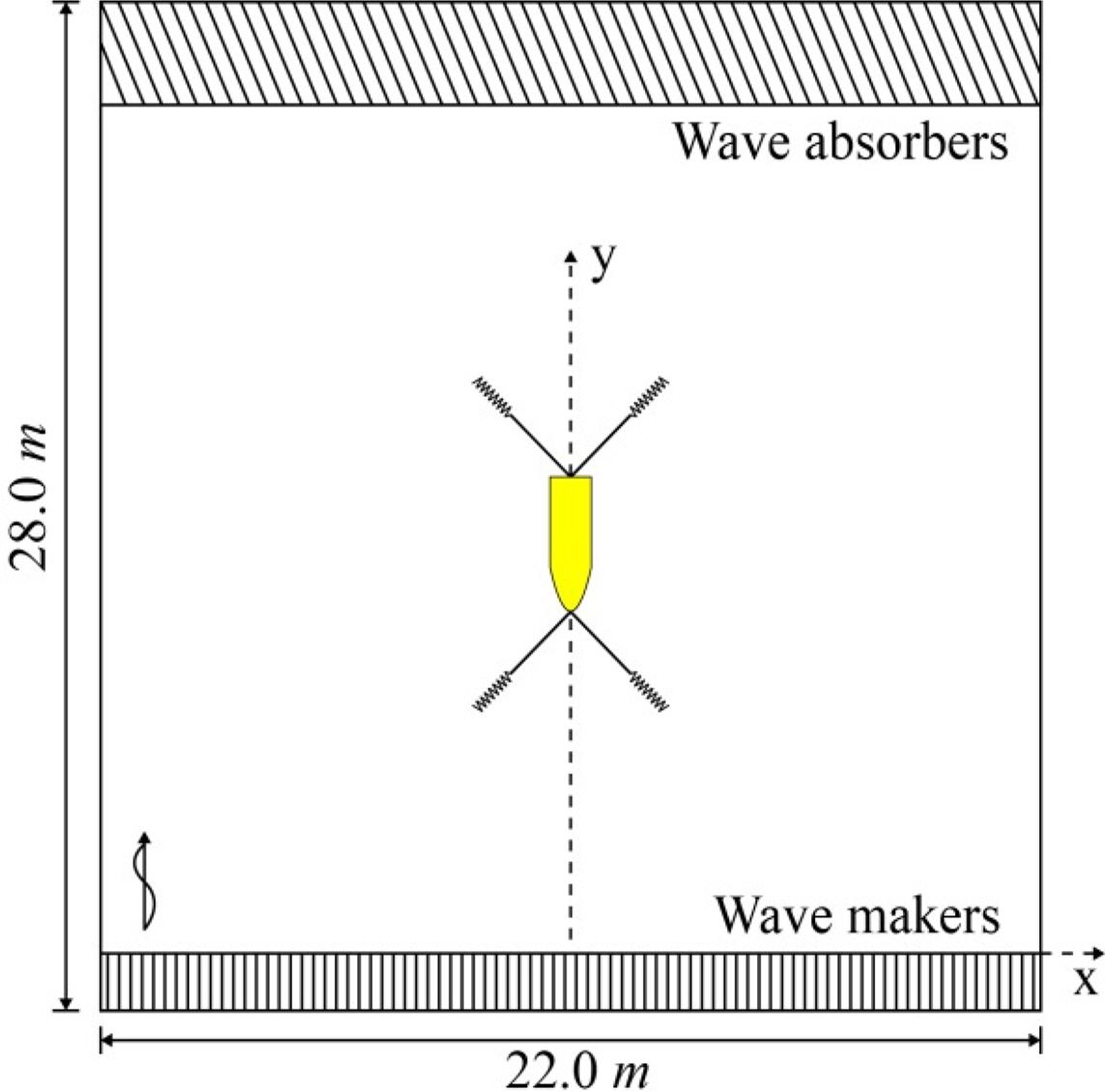
Experiment layout at different views in the basin
The following wave encounter angles (x) were used in the experiment—head sea, bow sea, beam sea, stern sea, and following sea conditions—as shown in Fig. 4. The wave encounter angle is 180º for the head sea condition and 0º for the stern sea condition.
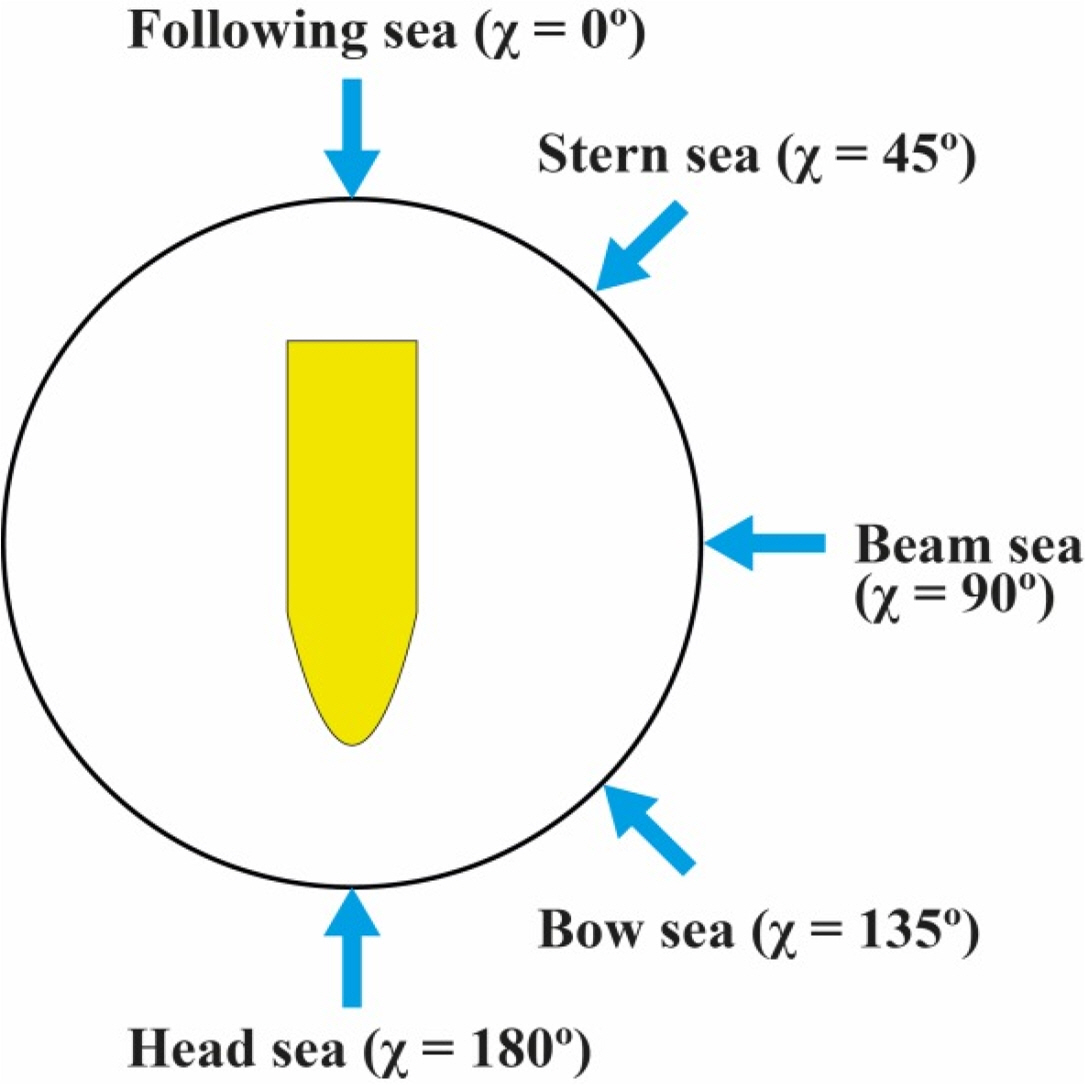
Wave encounter angle
The height of the waves was measured using a wire resistance-type wave probe. The wave height signal was converted into a voltage and sent to the data acquisition board in the computer. All data from the wave probe was measured at a sampling rate of 20 Hz. The motion characteristics of the fishing vessel were measured using alternating current (AC) electromagnetic-type motion measurement equipment, with data transmitted to a PC via radio frequency (RF) wireless communication. The motion measurement equipment can measure six degrees of freedom, but only heave, roll, and pitch motions were measured in this study. Fig. 5 shows the positions of the motion tracking equipment and gyro sensors installed on the model vessel.
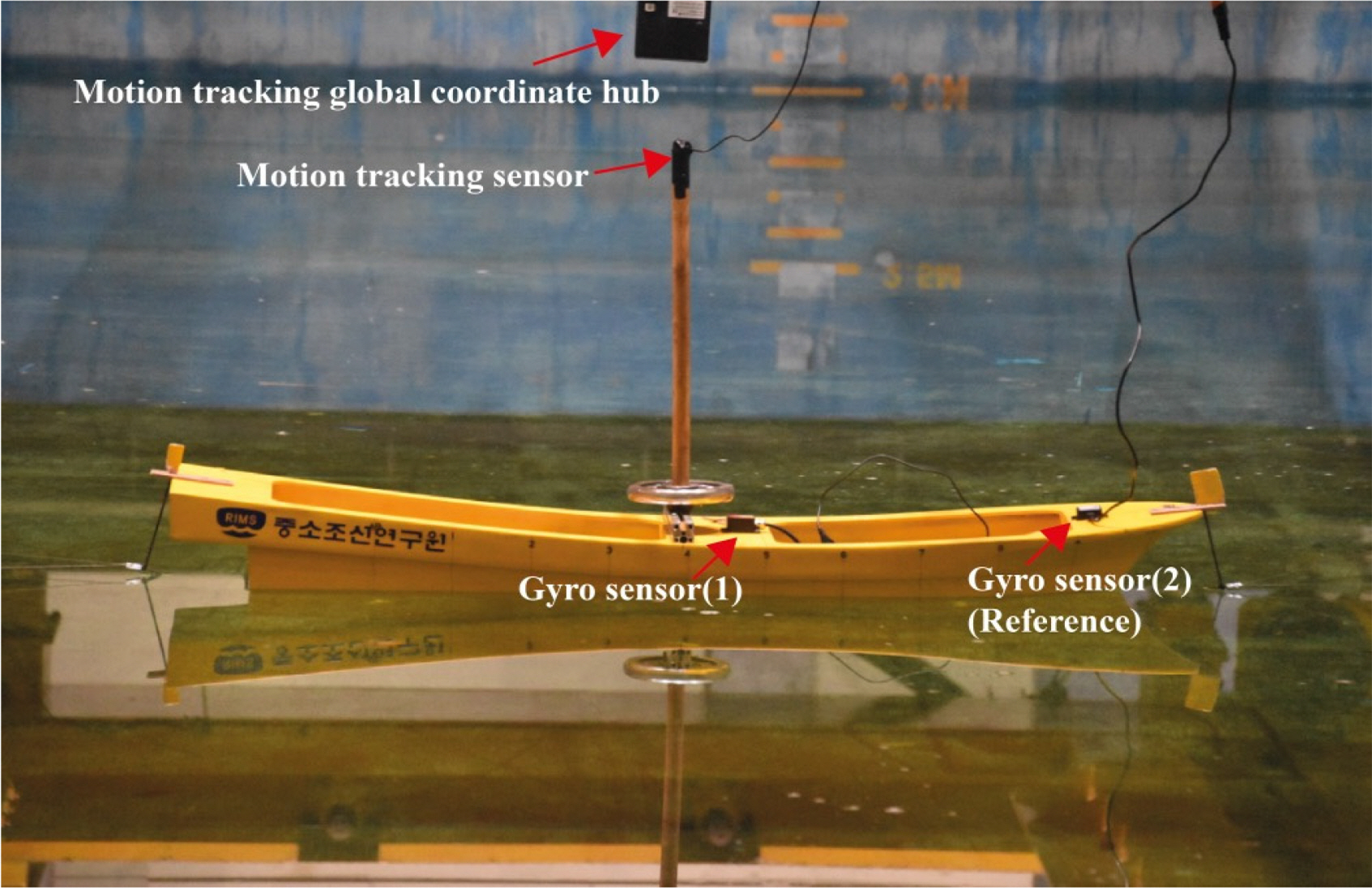
View of the model-located sensor
Table 3 shows the regular wave conditions used in the experiment to analyze the response characteristics. The wave steepness was maintained, while the wave period, was varied from 0.6 s to 2.0 s at a uniform interval of 0.2 s to determine the wave number and wave height, H. The experiment was conducted at wave range of 1.76–5.88 s for the 3-ton class fishing vessel, 1.84–6.15 s for the 7-ton class fishing vessel, and 1.98–6.63 s for the 10-ton class fishing vessel. In Table 4, the wave period was maintained, while the wave steepness was varied from 0.05–0.11 at uniform intervals of 0.02 to analyze the response characteristics based on the wave steepness. This experiment was conducted with a wave period of 3.69 s using only the 7-ton fishing vessel.
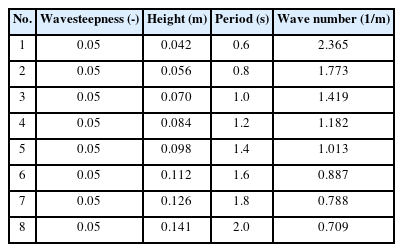
Experiment wave condition (same wave steepness)
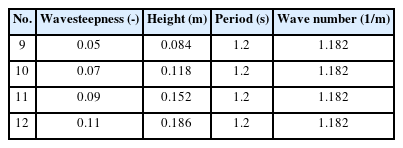
Experiment wave condition (same period)
2.3 Validation Studies
For regular wave validation, eight regular waves with the same wave steepness and different wave periods and four regular waves with the same period and different wave steepness were generated in the wave tank with a depth of 2 m. The physical wave maker signal was converted into a voltage and sent to the data acquisition board, ensuring excellent repeatability of the experiment. The measurement time was set to less than or equal to 40 s to avoid the effect of reflected waves on the experimental results. At least 30 wave periods were generated for each wave, with 9–11 wave periods in a normal state selected. Figs. 6 and 7 show the wave heights for the validation of the incident waves.
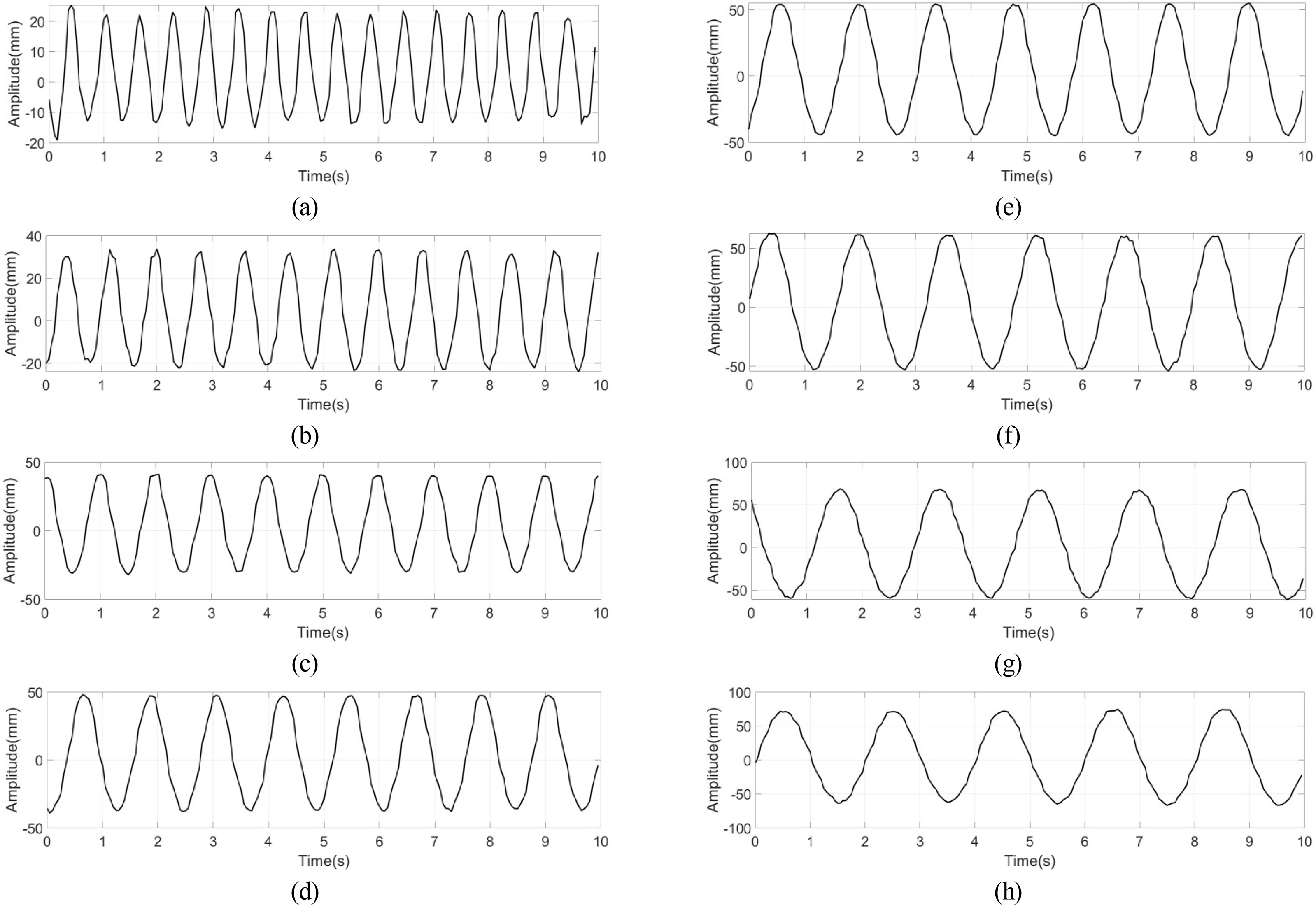
Validation of incident wave (same wave steepness): (a) No. 1, (b) No. 2, (c) No. 3, (d) No. 4, (e) No. 5, (f) No. 6, (g) No. 7, (h) No. 8

Validation of incident wave (same period): (a) No. 9, (b) No. 10, (c) No. 11, (d) No. 12
3. Results and Discussion
3.1 Analysis of Motion in Regular Waves with the Same Wave Steepness
Figs. 8–10 show the experimental results of the heave, roll, and pitch motions in regular waves when the wave steepness remains the same. The graphs on the left, middle, and right show the experimental results for the 3-ton, 7-ton, and 10-ton class fishing vessels, respectively.
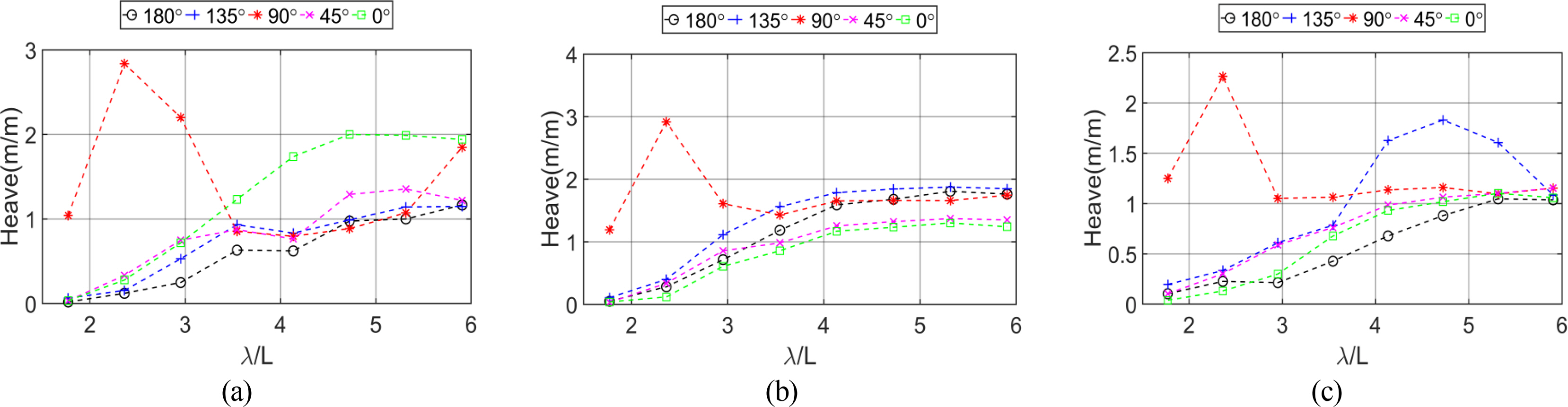
Heave motions: (a) 3 G/T class, (b) 7 G/T class, (c) 10 G/T class
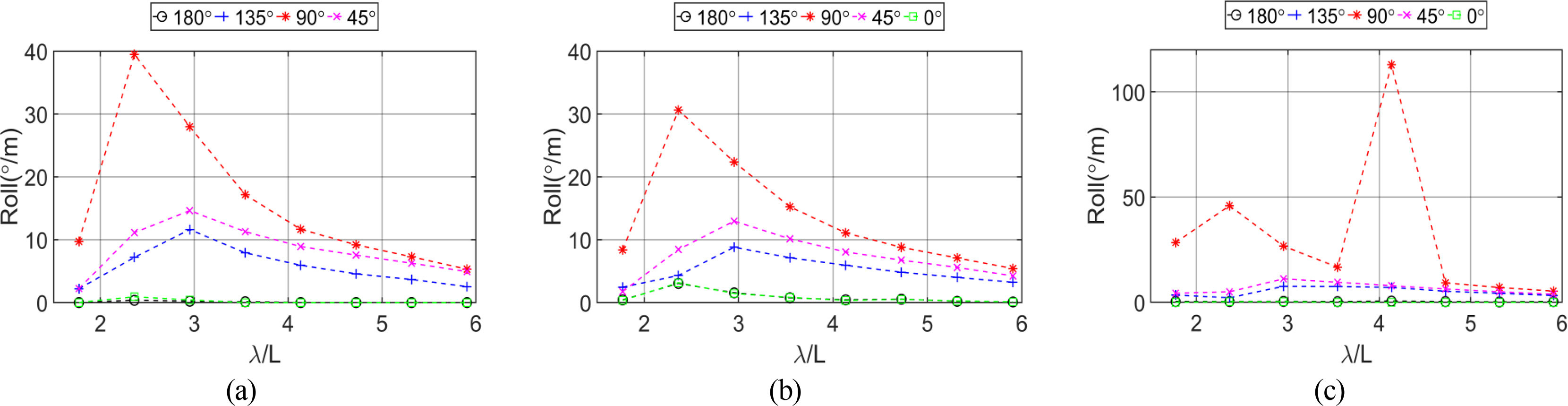
Roll motions: (a) 3 G/T class, (b) 7 G/T class, (c) 10 G/T class
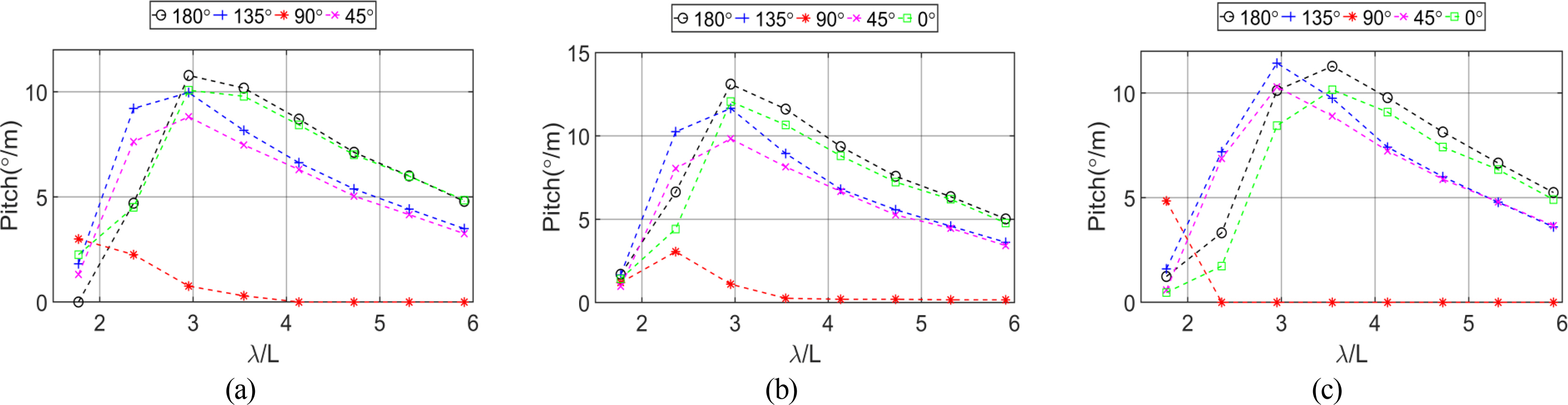
Pitch motions: (a) 3 G/T class, (b) 7 G/T class, (c) 10 G/T class
Fig. 8 shows the heave motion characteristics under different wave direction conditions. The size of the heave motion characteristics was similar to that of the incident waves as the wavelength increased. However, in the case of the beam sea (x = 90°), the heave motion characteristics were the largest at λ/D = 2.36 for all three fishing vessels (3, 7, and 10-ton class vessels). In addition, in the case of the 10-ton class fishing vessel, the motion characteristics were the largest at λ/D = 4.72 in the bow sea condition. Therefore, it is recommended that 10-ton class fishing vessels avoid bow seas when drifting.
Fig. 9 shows the roll motion characteristics under different wave direction conditions. Similar to the heave motion, the roll motion was also amplified in a specific region. High roll motion occurred at λ/D = 2.36 under the beam sea condition (x = 90°) for all three fishing vessels (3-ton, 7-ton, and 10-ton class vessels). In the case of the 10-ton class fishing vessel, significant motion characteristics were exhibited at λ/D = 4.13, which is a longer wavelength. Based on this result, it is determined that λ/D = 4.13 is the natural period of the roll motion for the 10-ton fishing vessel. Moreover, 10-ton fishing vessels must avoid the natural period of the roll motion when drifting as it could be dangerous when a 10-ton fishing vessel encounters the natural period of the roll motion. In addition, it is necessary to change the direction of the fishing vessel since the fishing vessel exhibited relatively high roll motion characteristics at λ/D = 2.95 in a head sea (x = 135°) and stern sea (x = 45°).
Fig. 10 shows the pitch motion characteristics under different wave direction conditions. The 3-ton class and 7-ton class fishing vessels exhibited high pitch motion characteristics at λ/D = 2.95 in a head sea (x = 180°) and following sea (x = 0°), while the 10-ton class fishing vessel exhibited high pitch motion characteristics at λ/D = 3.54 because of differences in the length of the fishing vessels; however, it does not represent a large difference in terms of wavelength. Therefore, caution must be exercised for real vessels in the wave period between 3.31–3.98 s, equivalent to λ/D = 2.95–3.54.
3.2 Analysis of Motion in Regular Waves with Different Wave Steepness
Figs. 11 and 12 show the motion characteristics of the 7-ton class fishing vessel in a bow sea (x = 135°) and stern sea (x = 45°) when the wave steepness is varied in regular waves.

Motion of bow sea (x = 135°): (a) Roll motion, (b) Pitch motion
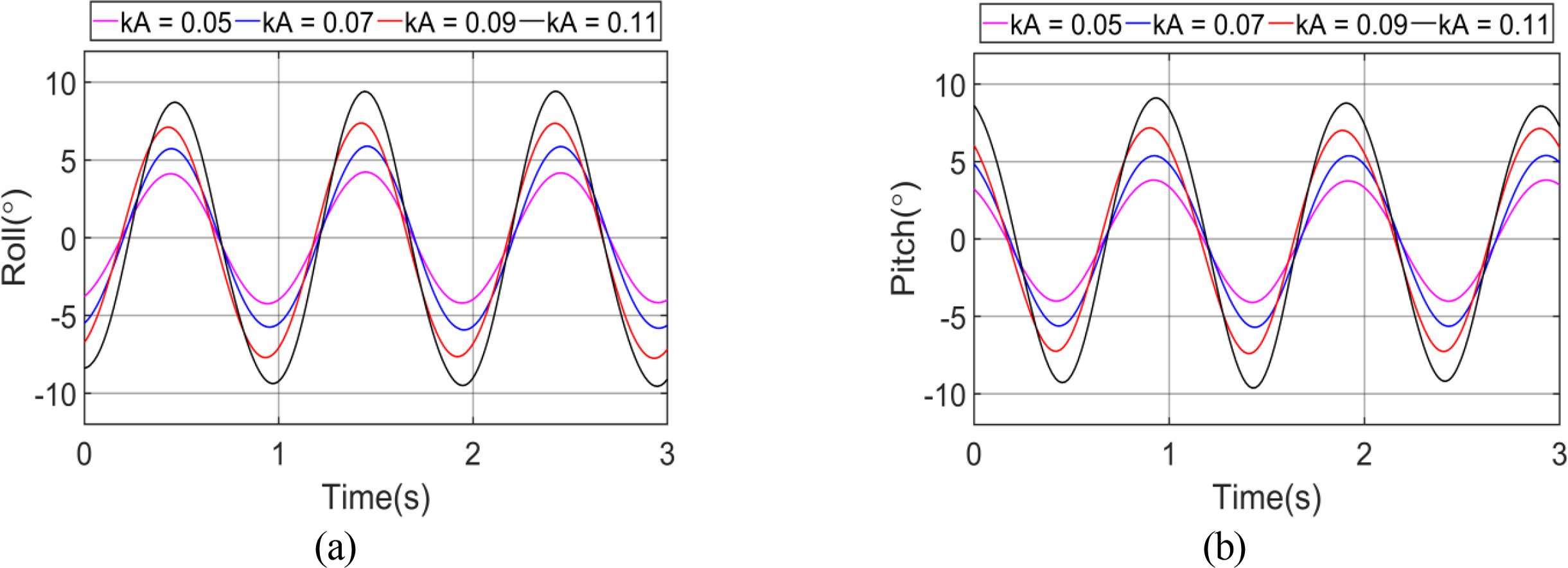
Motion of stern sea (x = 45°): (a) Roll motion, (b) Pitch motion
The size of the roll and pitch motions increased as the wave steepness increased in both a bow sea (x = 135°) and stern sea (x = 45°). In addition, both the roll and pitch motions increased linearly as the wave steepness increased at uniform intervals. The period was set the same as the period of the incident wave, i.e., 1.2 s; consequently, the period of the motions was also the same. Based on this phenomenon, if the wave height is substituted in the motion phenomena of Figs. 8–10, we can obtain the motion characteristics of the wave height.
Fig. 13 shows the characteristics of the bow sea (x = 135°) and stern sea (x = 45°) according to the wave steepness as the roll and xpitch motions. The characteristics of both the bow sea (x = 135°) and the stern sea (x = 45°) increased linearly as the wave steepness increased. However, in the case of the roll motion, the characteristics of the bow sea were larger, while the characteristics of the stern sea were larger for the pitch motion. These phenomena can be caused by the effect of the chine of the fishing vessel reducing the roll motions in the stern sea (x = 45°).
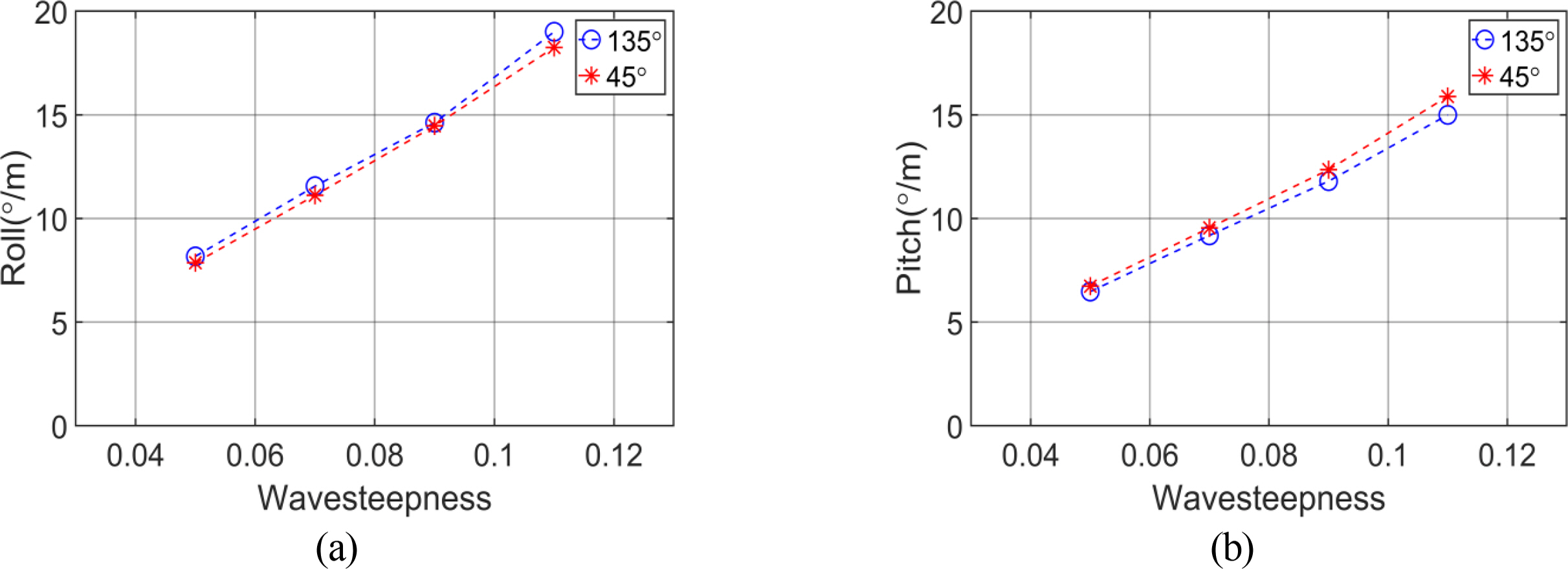
Motion according to wavesteepness: (a) Roll motion, (b) Pitch motion
4. Conclusions
In this study, we conducted wave tank tests on three small fishing vessels by simulating drifting conditions. The characteristics of the roll and pitch motions were analyzed in regular waves with the same wave steepness. We analyzed the seakeeping performances by comparing the characteristics of each vessel. We verified whether the roll and pitch motion characteristics increased linearly and drew the following conclusions by analyzing the roll and pitch motion characteristics of a 7-ton class fishing vessel according to the wave steepness in a bow sea and stern sea.
The largest heave motions occur when λ/D = 2.36 in a beam sea when 3-ton, 7-ton, and 10-ton class fishing vessels were drifting. Therefore, such a fishing vessel should change its direction towards the bow sea or stern sea direction. Large roll motions also occur when λ/D = 2.36 in a beam sea. In the case of the 10-ton class fishing vessel, huge roll motion characteristics are exhibited at λ/D = 4.72. Therefore, 10-ton class fishing vessels should avoid a beam sea when drifting. The largest pitch motions occur in a head sea and a following sea. As the wavelength is longer than the size of the vessel, similar characteristics are exhibited. Fishing vessels should turn in a direction other than a beam sea, which generates large roll motions because roll motions are larger than pitch motions in all fishing vessels.
We checked the roll and pitch motion characteristics by varying the wave steepness while keeping the wave period the same in a bow sea and stern sea. Considering the characteristics increased linearly, we can substitute the wave height to obtain the motion characteristics of the wave height.
In the future, we plan to experimentally analyze the change in the motion characteristics based on the change in the center of gravity through regular and irregular waves to use the study findings as foundation data for improving the stability of fishing vessels.
Notes
No potential conflict of interest relevant to this article was reported.
This research was supported by a grant (20015029) of Regional Customized Disaster-Safety R&D Program, funded by Ministry of Interior and Safety (MOIS, Korea).