1. Introduction
The undulations on the water surface adopt inherently beautiful forms, such as the smooth regular features of progressive waves. On the other hand, despite the innate curiosity concerning water wave motion, it was only in the 19
th century by Airy that efforts to provide a mathematical description of wave motion began in earnest (Henry, 2008). Since the early development of the theory describing the waves using the perturbation method by
Stokes (1847), many nonlinear solutions were obtained, both analytically and numerically.
Based on the use of truncated Fourier expansions for flow field quantities,
Chappelear (1961) and
Dean (1965) developed a ‘Fourier approximation’ (
Tao et al., 2007). By choosing the expansions to satisfy the Laplace equation and the BBC, the problem was reduced to solving a set of nonlinear equations for each of the Fourier coefficients, and the wave properties (
Tao et al., 2007). As the set of nonlinear equations is derived from the finite series, the expansions were represented by truncated Fourier expansions, which is why they are coined as Fourier approximations. Considerable research (
Chappelear, 1961;
Dean, 1965;
Chaplin, 1979;
Rienecker and Fenton, 1981;
Fenton, 1988) has been conducted on this approach.
The steam function theory was developed by
Dean (1965).
Dean (1965) proposed the use of the root mean square errors (RMSE) in the dynamic free surface boundary condition (DFSBC) and the kinematic free surface boundary condition (KFSBC) as an error evaluation criterion for wave theories.
Dean (1965) also defined the Lagrangian function by introducing the linear summation of the two errors on the free surface with a Lagrange multiplier. Fourier coefficients were determined to minimize the Lagrangian function. The required order (N) of the stream function theory is determined by the wave steepness and shallow water parameter. For
N = 1, the stream function theory reduces to the Airy wave theory. As the breaking wave height is approached, more terms are required to accurately represent the wave. Det Norske Veritas (
DNV, 2010) described that stream function wave theory has an error of more than 1% in deep water waves whose height is over 90% of the breaking limit even though the required order is increased (See
Figs. 3–
4 in
DNV (2010)).
Chaplin (1979) applied the Schmidt orthogonalization process as an alternative to Dean’s method and obtained improved results (
Tao et al., 2007).
Rienecker and Fenton (1981) also adopted the stream function introduced by
Dean (1965). The unknown constants were calculated directly with Newton’s method in
Rienecker and Fenton (1981). Therefore, the method required partial derivatives with regard to unknown constants, which complicated the numerical formulation of Newton’s method.
Fenton (1988) obtained all the partial derivatives for simplification of this method numerically. Because the reference depth parameter is simultaneously determined with the Fourier coefficients, the required order should be increased to reduce the numerical error in the water depth condition. Newton’s method is unstable because the number of unknown coefficients increases when the required order increases. Therefore, the Newton method requires an initial solution closer to the exact solution. To solve it, in common with other versions of the Fourier approximation, it is sometimes necessary to solve a sequence of lower waves, extrapolating forward in height steps until the desired height is reached (
Fenton, 1988). This problem can be avoided using the sequence of height steps (
Fenton, 1990). As
Rienecker and Fenton (1981) pointed out, several aspects of Fourier approximations beyond just the truncation of the series inhibited its widespread use (
Tao et al., 2007). Neither of the above stream function approaches can be applied to waves in deep water because the stream function expansions contain hyperbolic functions (
Fenton, 1988).
Shin (2016) reported that most numerical errors resulted from denominators in the stream function, the numerical integration of the water depth condition, and problems involved in Newton’s method.
Shin (2016) solved the problems by separately calculating the water depth condition and introducing deep water velocity potential without denominators and a dimensionless coordinate system. The flow field was represented with a velocity potential to satisfy the Laplace equation and the bottom boundary condition (BBC). Two wave profiles were calculated by applying the velocity potential to the KFSBC and the DFSBC. The potential contains
N+2 unknown constants, which are N Fourier coefficients, the wave steepness, and the reference depth parameter, while the stream function contains
2N+6 unknown constants (
Rienecker and Fenton, 1981;
Fenton, 1988). The wavelength and the reference depth parameter are not coupled to the Fourier coefficients because the dimensionless coordinate system was defined with the phase and the dimensionless elevation. Therefore, the wavelength and the reference depth parameter were determined independently. As a result, the required order was reduced in
Shin (2016) and
Shin (2021)
All the above-mentioned advantages resulted from the dimensionless coordinate system (Refer to
Figs. 1 and
2). In addition to the advantages, there are some advantages to the coordinate system in
Fig. 2. The independent variable is the relative horizontal position with regard to the wavelength in the moving coordinate system (
Rienecker and Fenton, 1981;
Fenton, 1988). The horizontal positions are also unknown values in Fenton’s method because the wavelength is an unknown constant, which makes the numerical procedure much more complicated. On the other hand, the independent variable is the phase in the range [0, π] in
Shin (2016), which is a known value. In addition, partial derivatives with regard to the wavelength are unnecessary, unlike Fenton’s method (
Rienecker and Fenton, 1981;
Fenton, 1988). All the partial derivatives necessary can be calculated with tensor analysis, while they are calculated numerically in Fenton’s method. Therefore, there are no errors in the partial derivatives, unlike Fenton’s method. The numerical formulation of Newton’s method was also represented by tensor analysis.
Some waves near the breaking limit were calculated for verification, and their errors were checked with Dean’s criteria. The deep water breaking limit was checked. According to the required order, the trend of numerical error was checked. There is a limit to the series order, i.e., N ≤ 12. This is why the other approximations are unsuitable for deep water waves.
2. Complete Solution
The complete solution was presented by
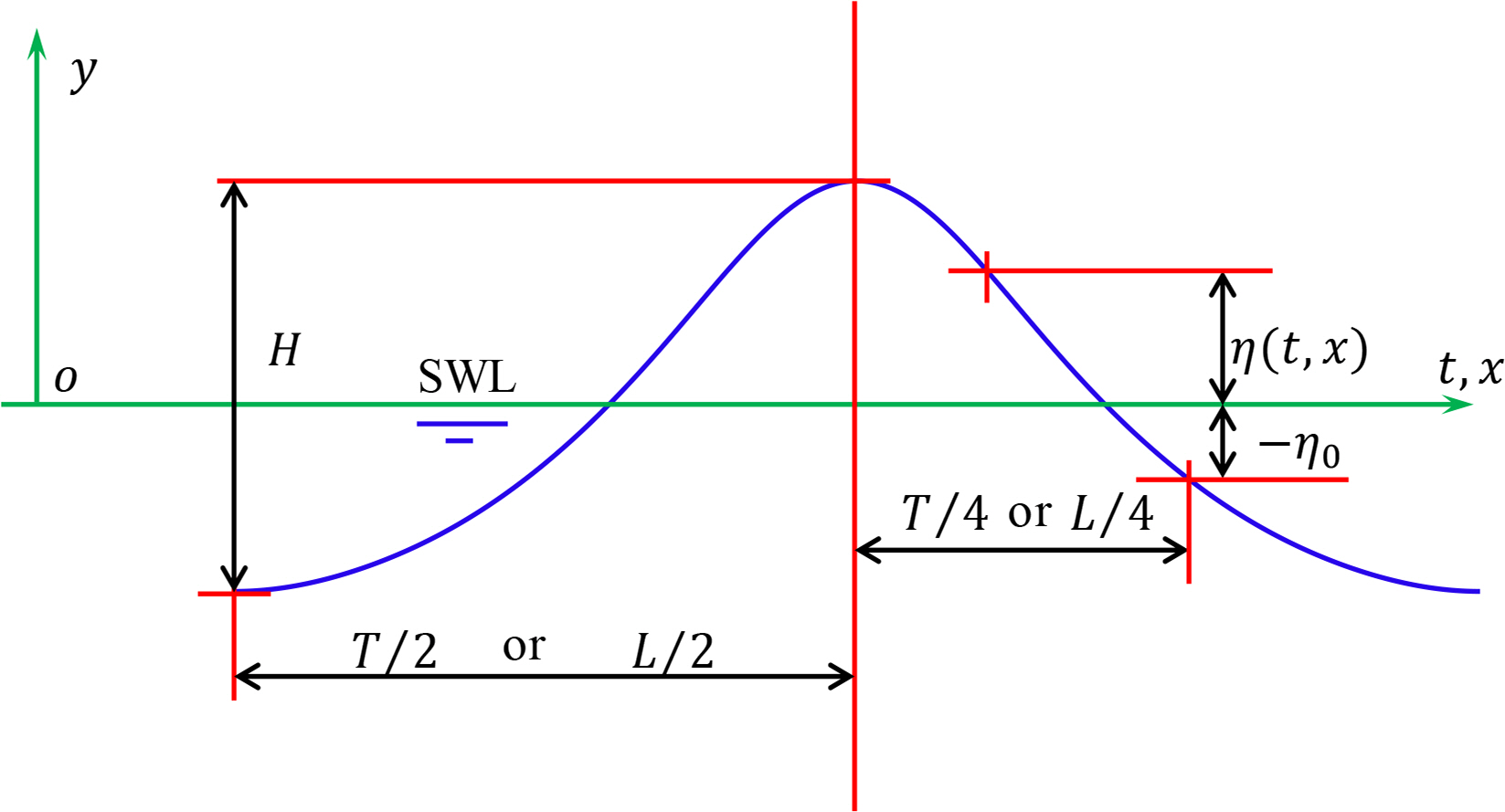
Shin (2016), and the results are summarized in this chapter. Two coordinate systems were adopted to describe a progressive water wave. One is the conventional coordinate system (
t,
x, y) shown in
Fig. 1. The origin is located on the still water line. The
x-axis is in the direction of the wave propagation, the
y-axis points upwards, and
t is time. The fluid domain is bounded by the free surface y =
η(
t,x)
.
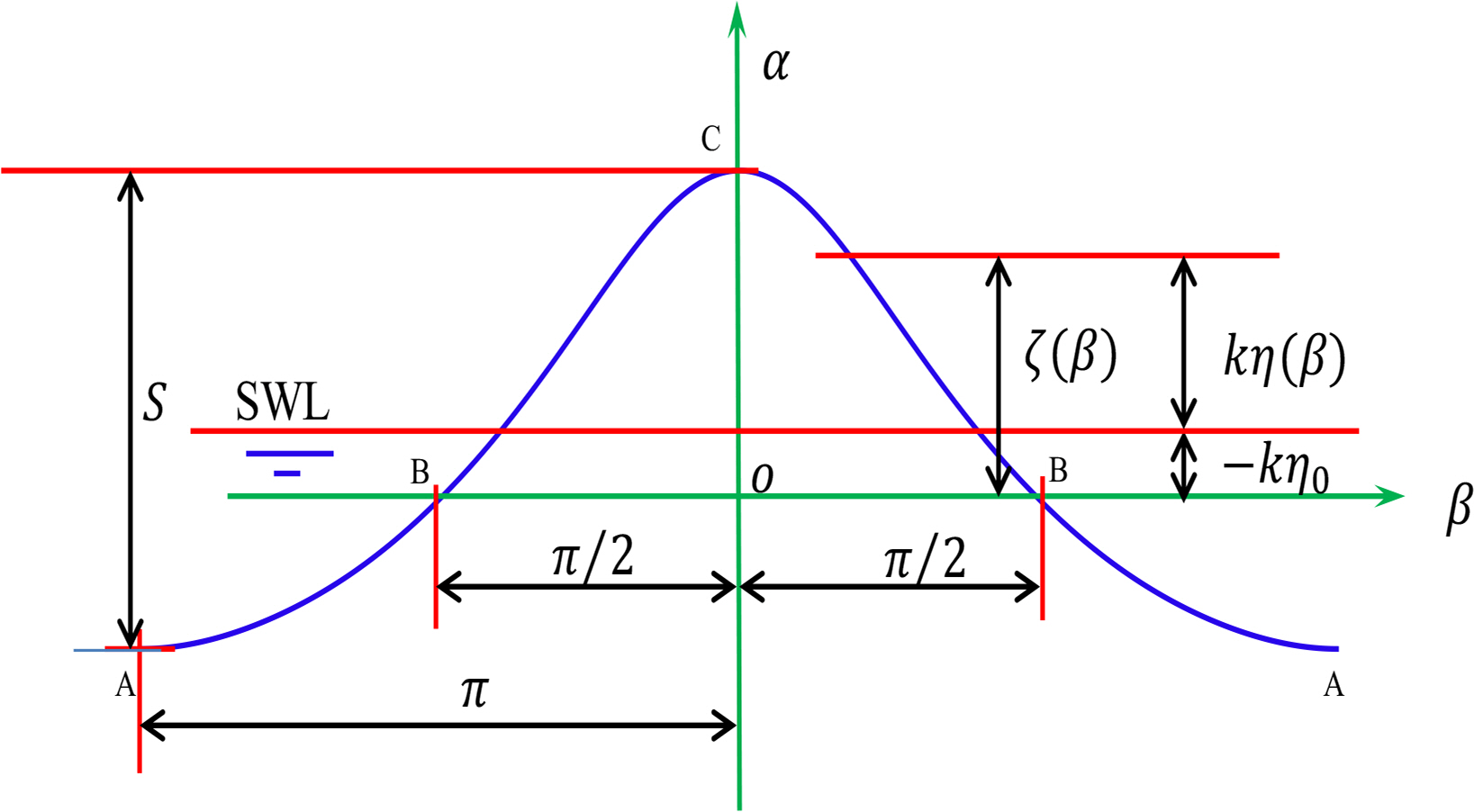
The other coordinate system (
β, α) is the dimensionless stationary frame shown in
Fig. 2. The origin is located at the point under the crest on the reference line, which is the horizontal line passing through two points at
ηo = η (±90°) on the free surface. Therefore, the wave profile is a fixed, periodic, and even function in the system. The horizontal axis is the phase,
β = kx −
ωt, whose domain is −
π ≤
β ≤
π, where
k is the wave number defined by
kdef̳2π/L and
ω is the angular frequency defined by
ωdef̳2π/T . The vertical axis is the dimensionless elevation from the reference line,
α = k(
y −
η0) in
α ≤
ζ, where
ζ =
k(
η −
η0) is the dimensionless free surface elevation from the reference line.
The velocity potential in finite depth is represented in
Shin (2019). The hyperbolic functions in the denominator are divergent as the water depth increases. Therefore, the potential is represented by the original deep water form without the hyperbolic functions.
where
an is a Fourier coefficient, which is dimensionless. The horizontal water-particle velocity is
where
c = ω/k is the wave celerity. The vertical water-particle velocity is
limα→−∞v=0, which is the BBC. The water-particle accelerations in the horizontal direction and the vertical direction are represented as follows:
The KFSBC is presented by an ordinary differential equation in the coordinate system. Solving the differential equation, the wave profile was calculated as follows (Refer to
Appendix A):
The integral constant was determined by the definition of the reference line, i.e.,
ζ(
±π/2)
= 0.
Eq. (6) contains only
N coefficients, while
Rienecker et al. (1981) contains
N+5 unknown constants, which are
N+1 coefficients, the wave number, celerity, volume rate, and Bernoulli’s constant. Compared to
Rienecker et al. (1981),
Eq. (6) is simple. Unknown constants are reduced dramatically by introducing the coordinate system in
Fig. 2. Bernoulli’s equation is represented in the dimensionless coordinate system as follows:
where
ρ is the water density, and
U and
V are dimensionless horizontal and vertical velocities defined by
Udef̳u/c and
Vdef̳v/c . Bernoulli’s constant is eliminated by the definition of the reference line, i.e.,
p(
±π/2,0) = 0
. U0 = U(
±π/2,0) and
V0 = V(
±π/2,0) are velocities at the phase of
β = ±π/2 on the free surface. The linear steepness is defined with
θdef̳(ω2H)/g where
g is gravity and
H is the wave height. The linear steepness is a constant for a particular wave. The other wave profile is calculated by applying the DFSBC (
p(
β, ζ = 0) to
Eq. (7), as follows:
Eq. (8) contains only
N coefficients and wave steepness. In addition,
Eq. (8) also satisfies that
ζ(
±π/2)
= 0. Dimensionless wave height (steepness) is defined by
Sdef̳kH, which provides the dispersion relation because the wave number is calculated as
k = S/H. The reference line is determined by the water depth condition presented as follows:
The steepness is determined by the wave height condition presented as follows:
For
N → ∞,
Eqs. (1)—
(10) provide the complete solution to irrotational deep water waves. The solution contains
N+2 unknown constants, i.e., the Fourier coefficient,
an, wave steepness,
S, and reference depth parameter,
kη0.
This study aims to present a method to numerically determine the constants. N+2 equations are necessary to determine the unknown constants. The two profiles in
Eqs. (6) and
(8) should be identical for all phases. Hence, a set of N equations are obtained so that
Eqs. (6) and
(8) are equal at
N phases. In addition, there are two equations, i.e.,
Eqs. (9) and
(10). As a result, there are
N+2 equations to determine the unknown constants.
An example for
N = 1 and for
N = 2 is presented in
Appendix B and
C, and
Shin (2016) and
Shin (2021) presented an example for
N = 3. This method is further simplified and generalized by tensor analysis in the next chapter.
3. The Fourier Coefficients and the Steepness
A method to determine the Fourier coefficients and the steepness is presented for an arbitrary number of N.
In the other Fourier approximations (
Rienecker and Fenton (1981),
Fenton (1988)), the profile,
η is directly calculated instead of
ζ. Therefore,
Eq. (9) must be simultaneously calculated with the coefficients. In this study, however, the profile
η was calculated with
ζ. Therefore,
Eq. (9) was not coupled with the coefficients in this study and was calculated after they were determined. Hence,
Eq. (9) is not considered in this chapter.
When the wave profile,
ζ is prescribed in advance, it is possible to convert
Eq. (6) to a set of linear equations to determine the coefficients. Because the wave profile is an even function, the phases β
m for
m = 1,2,
...,N are considered in the range, 0 ≤
βm ≤
π and
βm ≠
π/2 because
Eqs. (6) and
(8) already satisfy that
ζ(
±π/2) = 0. β
1 = 0 and β
N =
π. Letting
Xm = ζ(
βm)
, Eq. (6) is represented at the phase β
m as follows:
The summation convention is considered in
Eq. (11). The repeated subscript
“n” is a dummy subscript.
Kmn is a second-order tensor,
an and
Xm are vectors in N-dimensional space. The component of the tensor
Kmn is presented as follows:
Using the inverse tensor
Rmn of the tensor
Kmn, the solution to
Eq. (11) is determined easily as follows:
Using
Eq. (8), the error vector
Em in the DFSBC is defined as
where
S = X1 — XN from the wave height condition in
Eq. (10). Therefore, the wave height condition is automatically integrated in
Eq. (14). The components of the second-order tensors in
Eq. (14) are represented as follows:
The third-order tensor
εijp is defined as follows:
A set of
N nonlinear equations represented by
Em = 0 for
Xm are obtained by substituting
Eq. (13) into
Eq. (14). The set of equations is solved with Newton’ s method. A set of linear equations can be derived by denoting partial derivatives of a tensor using commas and indices as
∂( )∂Xi=( ),i and applying Newton’s method to
Eq. (14).
Because
ΔXi[r]=Xi[r+1]−Xi[r], the solution in the next step is
The superscript [
r] with [ ] means the step of Newton’s method. All the steps are r
th in all equations except
Eq. (21) in this chapter. Therefore, for the simplification of equations, the superscript [
r] was omitted in all the equations except
Eq. (21). Differentiating
Eq. (14) with respect to
Xi, the partial derivative
Em,i of the error vector is
Differentiating
Eqs. (15)—
(18) with respect to
Xi, the components of the third-order tensors are
Differentiating
Eq. (11) with respect to
Xp, we have
where
Xm p = δmp and
δmp is the second-order isotropic tensor. Multiplying
Eq. (26) by the tensor
Rim, the partial derivative of the coefficient is easily determined as follows:
where
RimKmn = δin and
δinan,p = ai,p. Differentiating
Eq. (12) with respect to
Xp,
Therefore, all the partial derivatives necessary were easily obtained without errors, unlike
Fenton (1988).
Representing an individual component of a tensor as shown in
Eqs. (12),
(15)—
(18),
(23)—
24), and
(28), the summation convention was not considered. As a criterion of convergence, the Root Mean Square Error in the DFSBC proposed by
Dean (1965) was adopted. Dividing the inner product of the error vector
Em by
N, the RMSE in the DFSBC (
Dean, 1965) is defined as follows:
Newton’s method was rapidly convergent to the complete solutions (whose RMSE ≤ 10
−13% within three steps) when the result of
Shin (2021) was used as the first step solution. There are some differences in the above approach compared to Fenton’s method (
Rienecker et al., 1981;
Fenton, 1988).
Eq. (11) is linear and decoupled from Eq. (20).
All the partial derivatives with respect to wavelength are not required.
All equations can be formulated with tensor analysis.
Xi are merely parameters for calculating the coefficients and the steepness in this study. After determining the coefficients, Xt are no longer used. Hence, the wave elevation is denoted with Xi instead of ζi in Eqs. (11)—(28).
After determining the coefficients and the steepness, the wave profile and water depth condition were calculated separately, as presented in the next chapter.
4. Wave Profile and Reference Depth Parameter
The Fourier coefficients and the steepness were determined in advance. Therefore, the wave profile can be calculated with
Eq. (6) as follows:
Eq. (6) is represented as
where
F(
β, ζ) = 0. The power series of
F(
β, ζ) is represented as follows:
where
F(q)=∂qF∂ζq.
Because
F(
β ζ) = 0,
Eq. (31) provides a polynomial equation with regard to
ζ. For
q = 1,
Eq. (31) provides a linear equation.
Eq. (31) provides a quadratic equation for
q = 2, and
Eq. (31) provides a cubic equation for
q = 3. The equations provide good approximations to the wave profile because |
ζ| < 1 for all cases. For q=2, the following approximation is obtained:
The other root is a trivial solution because it does not satisfy that |
ζ| < 1. The approximation is used as the first step in the Newton’s method defined as follows. The superscript [
n] means the
n’
th step of Newton’s method (where n is a natural number), while the superscript (
n) means the
n’
th order partial derivative with respect to
ζ. The wave profile is calculated as follows by applying Newton’s method:
where
|
F‘(
β,
ζ)| ≥ |
F’(0,
ζc)| for all waves and |
F‘(0, ζ
c)| = 0 is the breaking condition proposed by Stokes (
Chakrabarti, 1987). Therefore,
Eq. (34) is valid for all waves except breaking waves. The Newton method rapidly converges to the complete solution. The wave elevations
ζi =
ζ (
βi) were calculated using
Eq. (33). Note that
ζi stands for the free surface elevation at phase
βi. The integral is numerically calculated by substituting the results in water depth conditions as follows:
Because
ζ is an even function,
β1 = 0,
βi = (
i − 1)
π/
M and
βM+1 =
π. Note that M is independent of
N. When M is increased,
Eq. (35) can be calculated more accurately rather than
Rienecker et al. (1981) and
Fenton (1988).
5. Numerical Analysis Procedure
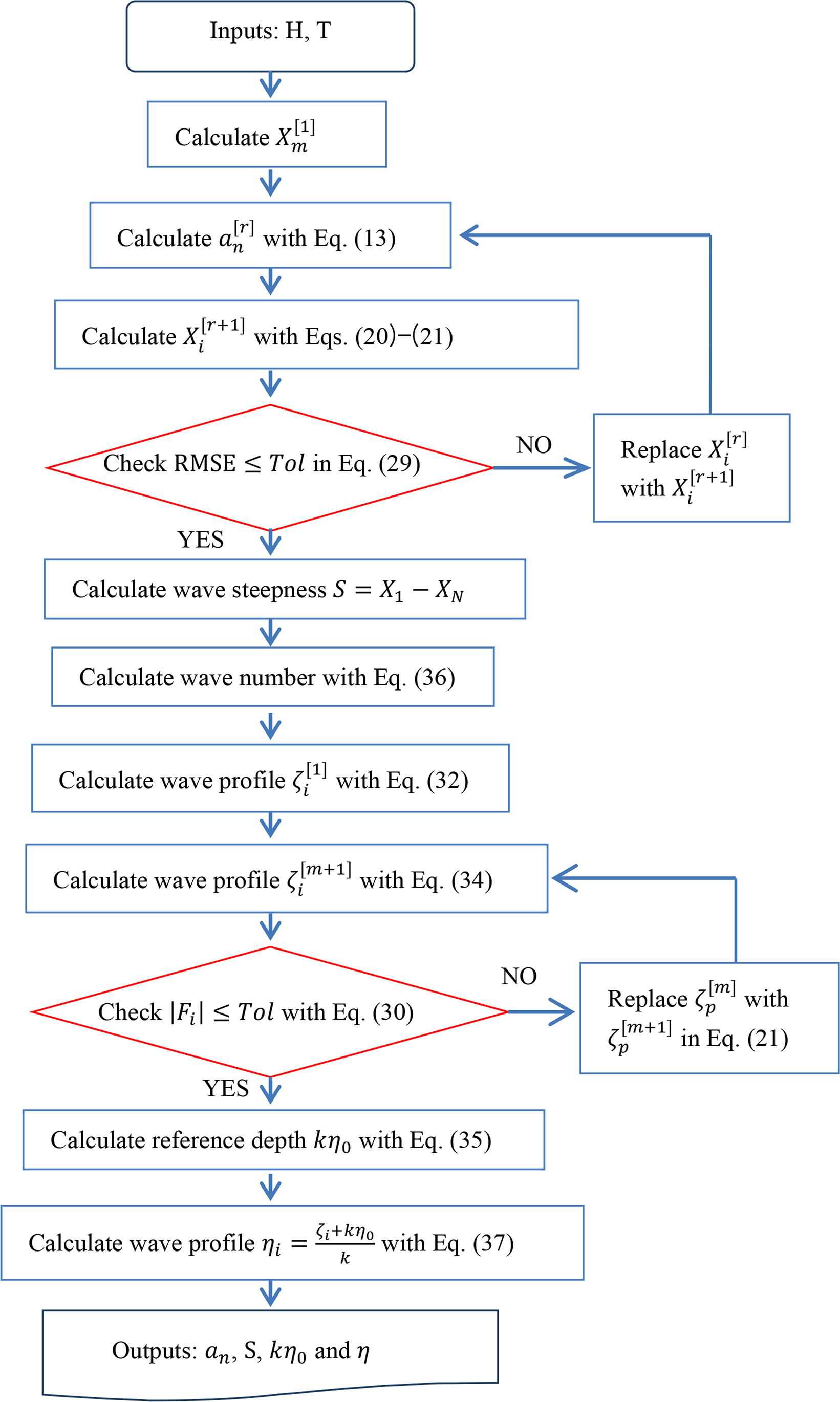
Fig. 3 presents a flow chart of the procedure. The chart comprises two DO-loops because the Fourier coefficients and wave profile are independently calculated. The first step,
Xm[1], was calculated using the result in
Shin (2021). The first DO-loop calculates the coefficients and the steepness. The coefficients,
an[r] are calculated by
Eq. (13). Substituting,
an[r] into
Eq. (20),
ΔXi[r] are calculated by
Eq. (20) and then
Xi[r+1] are calculated by
Eq. (21). The RMSE is calculated with
Eq. (29). If the RMSE is greater than the tolerance (1 × 10
−13%),
Xi[r] is replaced with
Xi[r+1]. The DO-loop continues until Newton’s method converges to the complete solution within the tolerance.
In this DO-loop, the Fourier coefficients and the steepness are determined. The wave number is calculated as follows:
The second DO-loop is used to calculate the free surface elevations at more phases than the phases considered in the first DO-loop. The elevations,
ζi[m+1] are calculated using Newton’s method in
Eq. (34). The DO-loop continues until Newton’s method converges to the complete solution within the tolerance (|
F(
βi,
ζi)| ≤ 1 × 10
−17) . Substituting
ζi into
Eq. (35), the reference depth parameter
kηo was calculated. With the results, the wave profile was calculated as follows:
The water particle velocities were calculated by substituting the Fourier coefficients into
Eqs. (2)–
(3), and the accelerations were calculated by substituting the Fourier coefficients into
Eqs. (4)–
(5). The pressure field was calculated by substituting the Fourier coefficients into
Eq. (7). The other wave profile was calculated by substituting the results into the right side of
Eq. (8). The error in DFSBC can be checked by comparing the two profiles.
6. Results
The Fourier coefficients,
an, the steepness,
S, and the reference depth parameter,
η0 are functions of one variable whose independent variable is the linear steepness,
θ. Consequently,
Shin (2019) numerically calculated some data for the coefficients, steepness, and reference depth parameters in the range, 0 <
θ < 1. By curve fitting the data, the Fourier coefficients, steepness, and reference depth parameter are represented by Newton’s polynomials in
Shin (2021), which give closed-form solutions. In this calculation,
N = 3 was considered. The results satisfied the Laplace equation, the BBC, and the KFSBC. The RMSE in the DFSBC was less than 1% in the range,
H/Lo ≤ 0.142 where
Lo is the linear wavelength defined as follows:
Because
θ =
2πH/Lo, H/Lo = 0.142 corresponds to
θ = 0.892. As a result,
Shin (2016,
2021) reported a good approximation whose error was less than 1% in the range, 0 ≤
θ ≤ 0.892. Although the error increases,
Shin (2021) still applies to the waves in the range, 0.892 ≤
θ < 0.999. When
θ > 0.999, wave profile by
Shin (2021) does not converge. Each researcher has a different criterion regarding deep water breaking limitations.
Chakarabarti (1987) proposes
H/Lo = 0.142. According to
Dean and Dalrymple, (1984), Michell theory is
H/Lo = 0.17, which corresponds to
H/L = 0.142. According to Stokes, the breaking criterion is
u = c at the crest. In this study, the limitation was checked and the errors according to the required order were also checked. It is also discussed why the other Fourier approximations are unsuitable for deep water waves. For the verification, three waves with a period of 6 s are considered, which were tabulated in
Table 1. The following series order was considered:
N = 1;
N = 3, 6, 10, 12, 13, and 35;
M = 180. The RMSE in the DFSBC was calculated and tabulated in
Tables 2 and
3. As the required order is increased, the error is decreased. When
N ≥13, Newton’s method in Ch. 3 did not converge because
eNζ is very large and
aN is very small. As a result, this study is available for
N ≤12.
Eq. (35) was coupled with the other equations to calculate the Fourier coefficients,
N = M and
Eq. (35) is calculated with
kη0=−12N∑i=1N(Xi+Xi+1) in Fentons’ method. Therefore, the required order should be increased in Fenton’s method. Because most errors of Fenton’s method resulted from the numerical integration of the water depth condition,
M should be increased to reduce it. Fenton’s method,
M = N = 64, is greater than
N=13. Therefore, Fenton’s method is unsuitable for deep water waves.
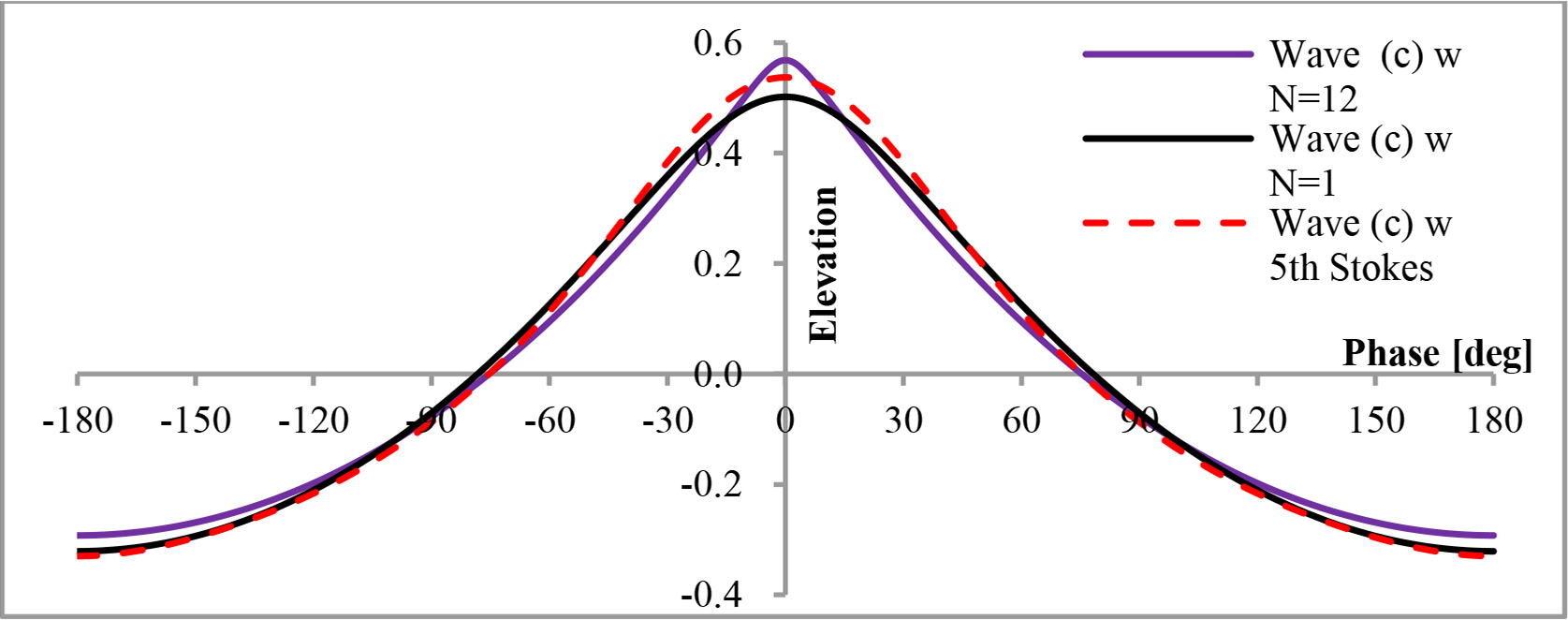
The wave height to wavelength ratio was calculated, as listed in
Table 4. The wavelengths were similar to the 5
th-order Stokes wave. When
θ > 1.028, this study does not converge. More precisely, Newton’s method does not converge because the wave profile at the crest is sharp when
θ > 1.028. Therefore,
θ = 1.028 is the limitation of this study, which corresponds
H/L = 0.137 and is slightly less than 0.142 according to
Dean et al., (1984).
The convergent speed decreased when the required order increased. For
θ ≤ 0.892,
Shin (2021) is acceptable as the first step solution in Newton’s method. For
θ > 0.892, the method reported by
Shin (2021) is unsuitable for the first step solution because the Newton method does not converge. This problem can be avoided using the sequence of height steps. For waves in the range 0.892 <
θ ≤ 0.999, the profile for
θ = 0.892 is used as the first step solution, and for waves in the range 0.999 <
θ ≤ 1.028, the profile for
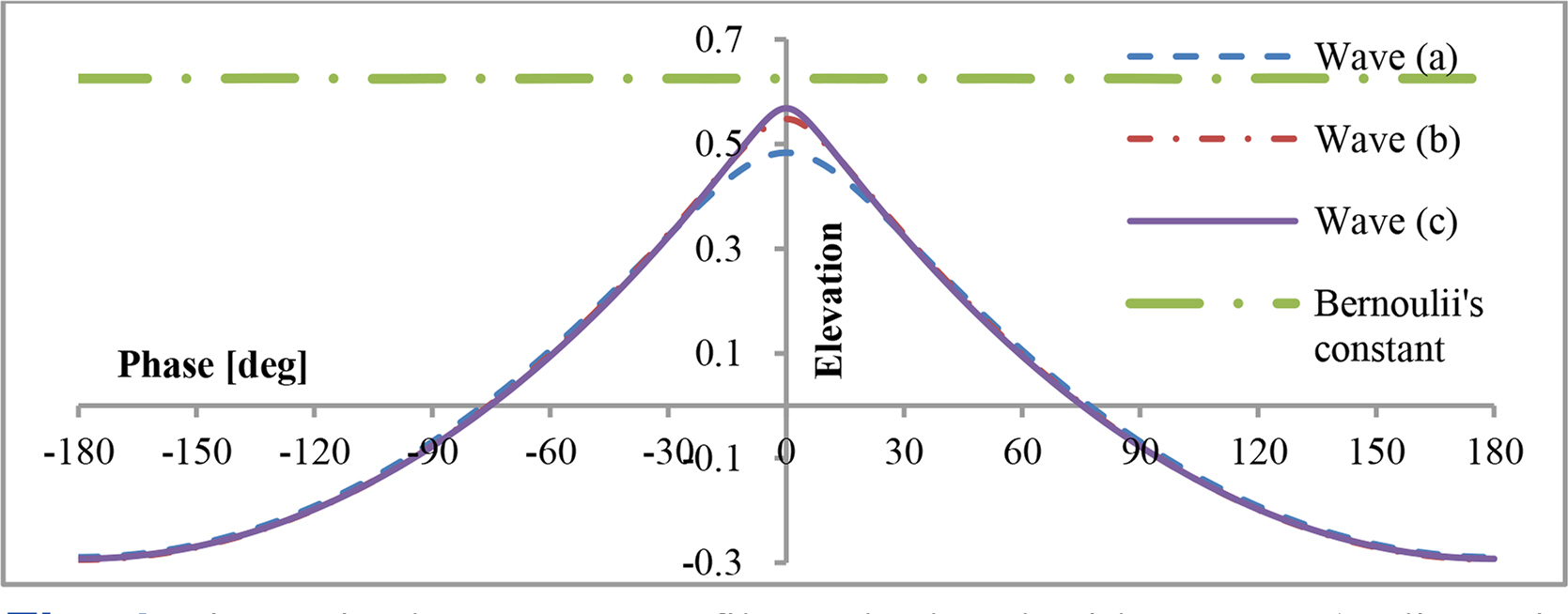
θ = 0.999 is used as the first step solution. The profiles are shown in
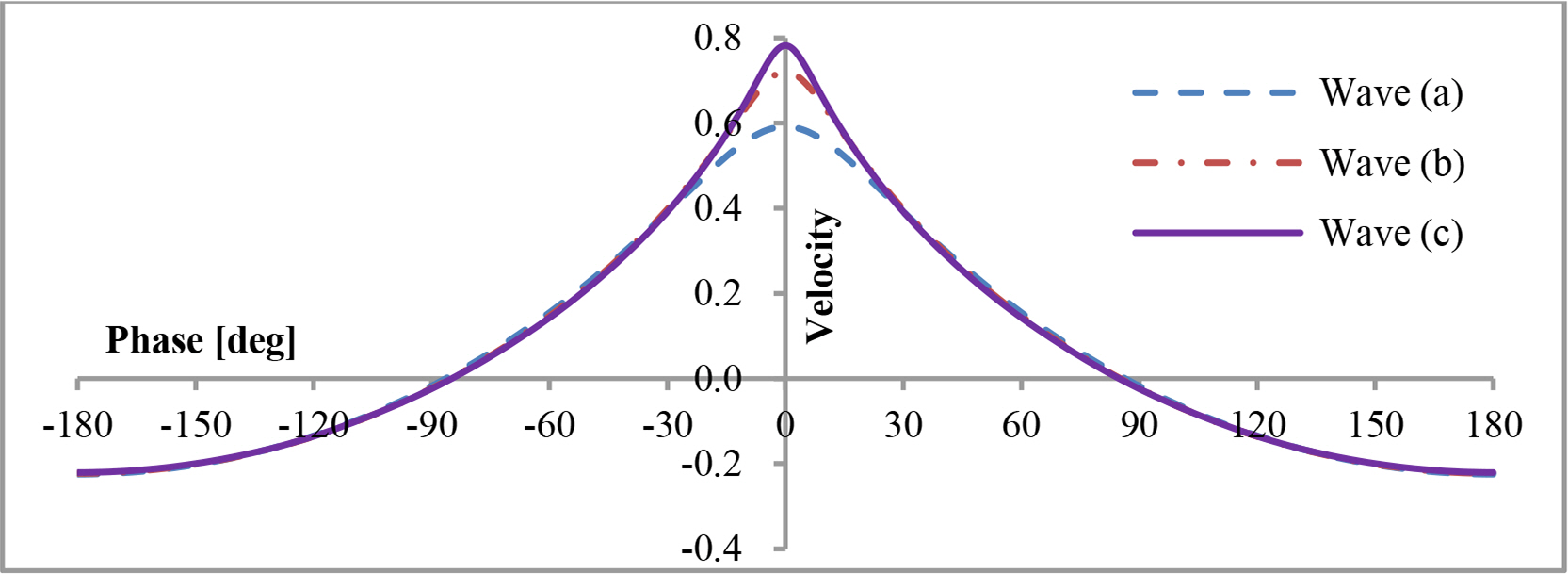
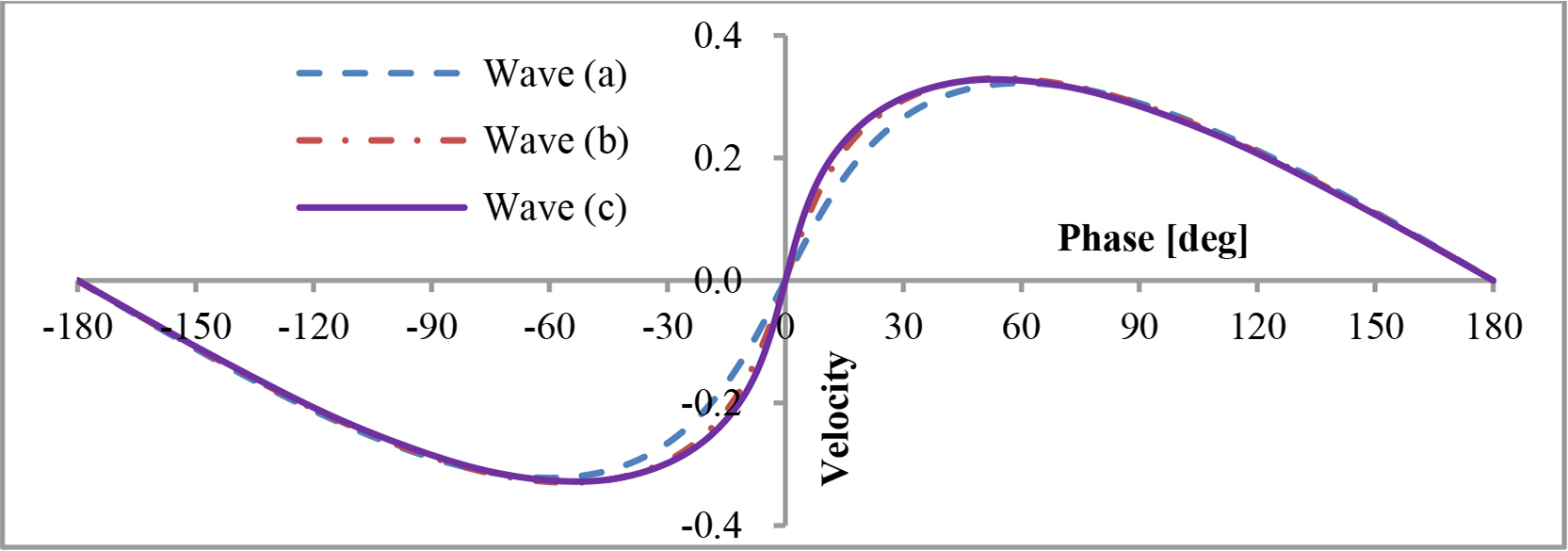
Fig. 4; the horizontal velocities are shown in
Fig. 5; the vertical velocities are shown in
Fig. 6. The relative horizontal velocity at the crest is 0.782 for wave (c), which is less than Stokes’ criteria, 1. The Bernoulli’s constant in
Fig. 4 is calculated for wave (c).
7. Conclusions
This study aimed to provide a numerical method to calculate the Fourier coefficient, steepness, and reference depth parameter. The numerical procedure is much more simplified than Fenton’s method (
Rienecker et al., 1981). The maj or simplifications are as follows:
Although the moving coordinate system by Dean was adopted in Fenton’s method, a dimensionless coordinated system was adopted in this study. As a result, all the partial derivatives with respect to wavelength are not required. Some parameters were eliminated.
All equations were formulated by tensor analysis. Therefore, numerical equations were much more simplified and had no errors.
In the other Fourier approximation, the required order was determined to reduce the error of the numerical integration in the water depth condition because it was solved simultaneously with the Fourier coefficients. On the other hand, the water depth condition was calculated independently. Therefore, the required order was reduced dramatically.
The error was reduced when the required order was increased. Nevertheless, there is a limit to the required order. This study is not applicable when N ≥ 13. Deep water breaking limitation was checked. This study is valid for waves in the range, 0 < θ ≤ 1.028. The limitation 1.028 correspond to H/L = 0.137, which is slightly lower than the Michell theory.