1. Introduction
2. Background and Literature Review
2.1 Background and Needs
2.2 Literature Reviews
3. Design of the System
3.1 Automatic Identification System (AIS)
3.2 Composition of the System
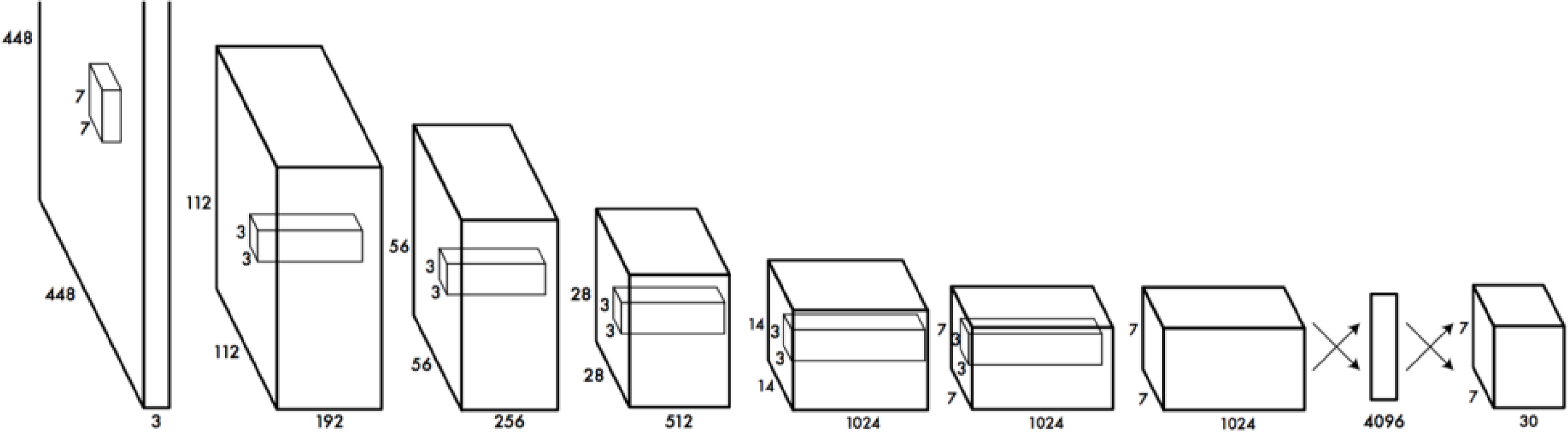
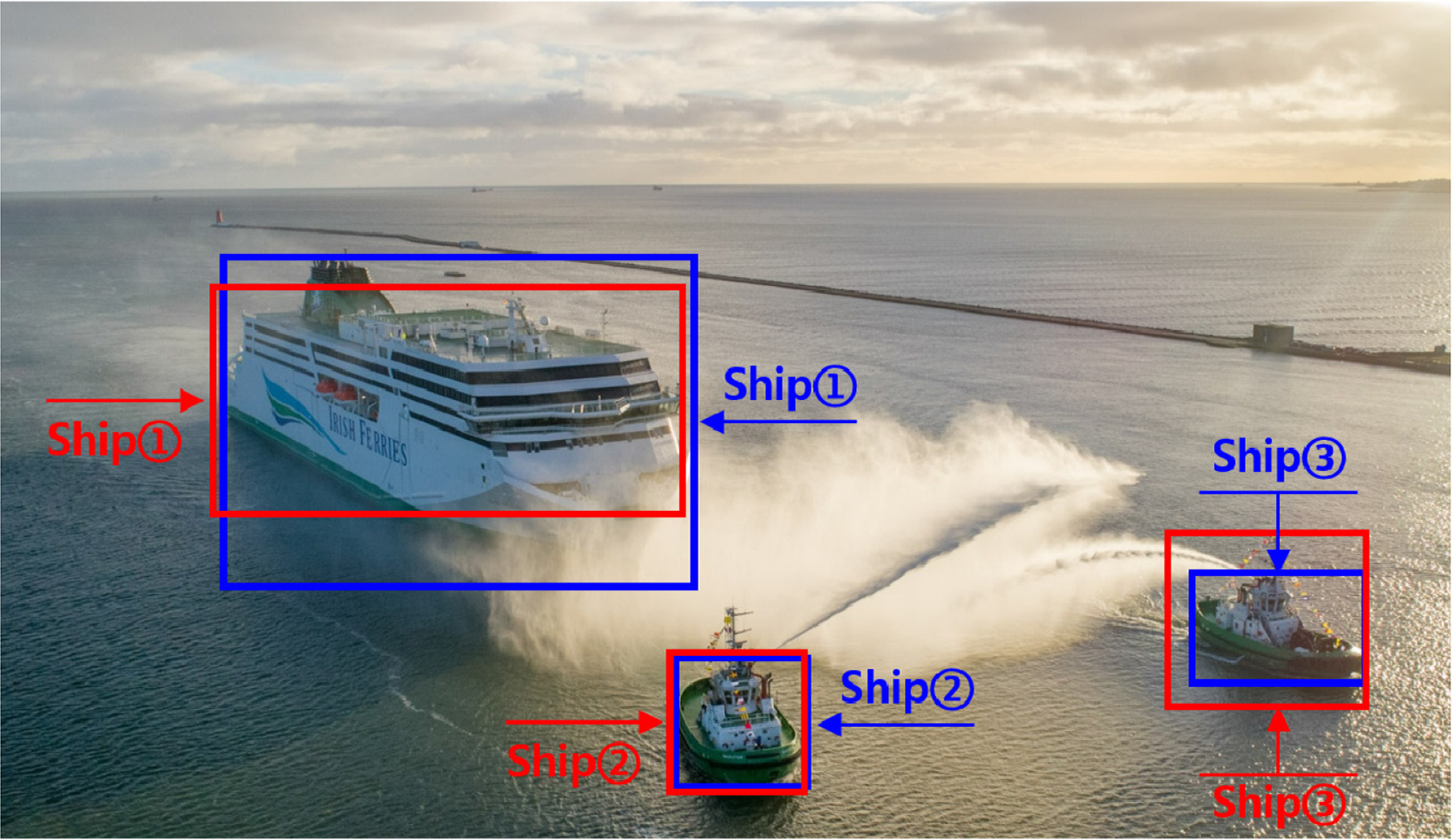
(1) The ship recognition algorithm obtains images of the visual scene in front of the ship from a camera facing the ship’s bow. Using artificial intelligence, the ship recognition algorithm recognizes other vessels in these images, such as large, medium, and small ships and fishing boats, that could be a risk factor during navigation.
(2) The crew recognition algorithm obtains images of the visual scene behind the ship using a camera facing the ship’s stern. Using artificial intelligence, the crew recognition algorithm recognizes the crew in these images to identify human accidents due to falls that could occur the carelessness of people onboard the ship. The term crew means people who are operating or navigating the ship or performing desk jobs. However, everyone onboard the ship, including the crew members, passengers, and people living on the islands, is exposed to the risk of overboard falls. Therefore, in this study, the term crew is used to refer to everyone onboard the ship.
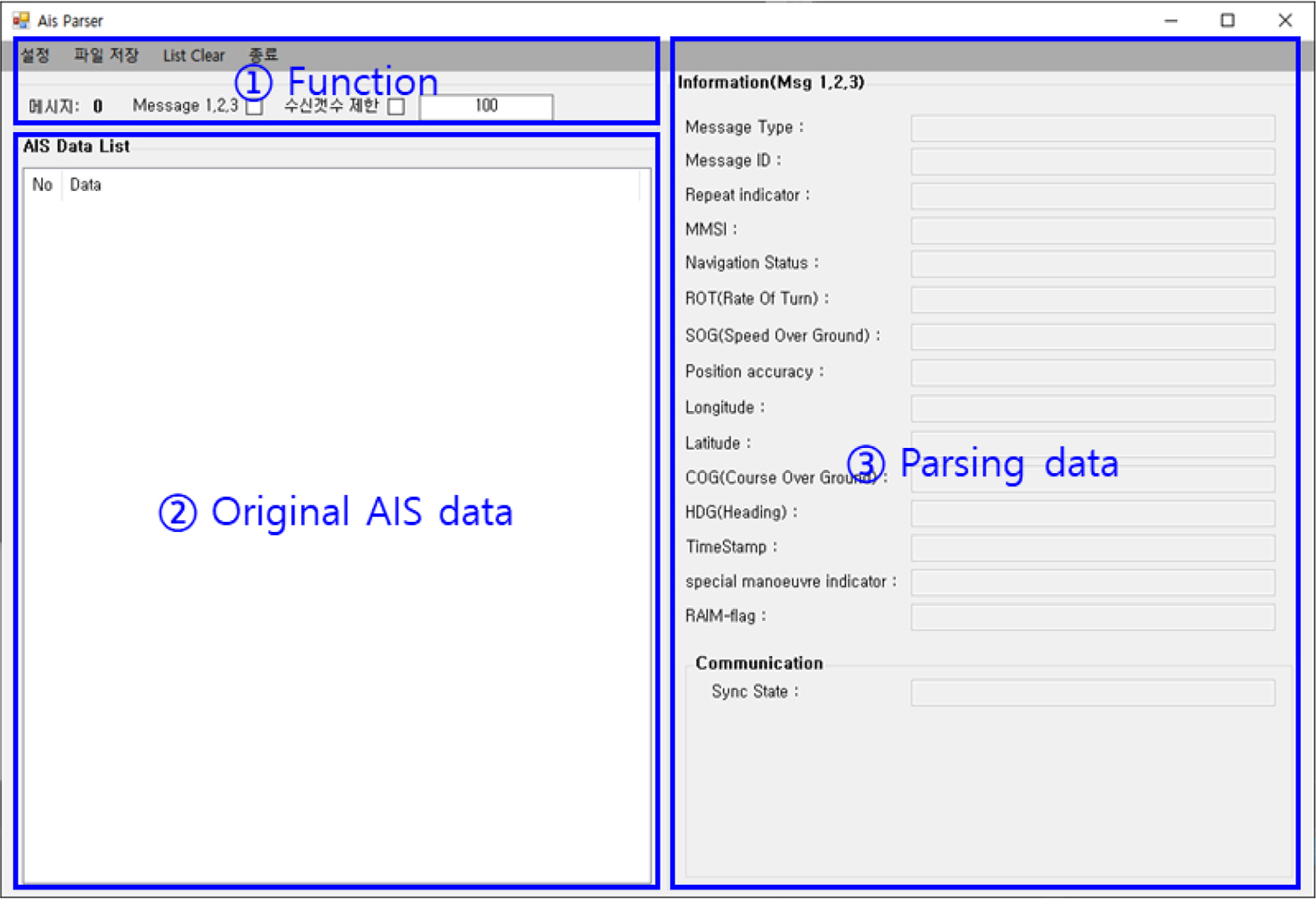
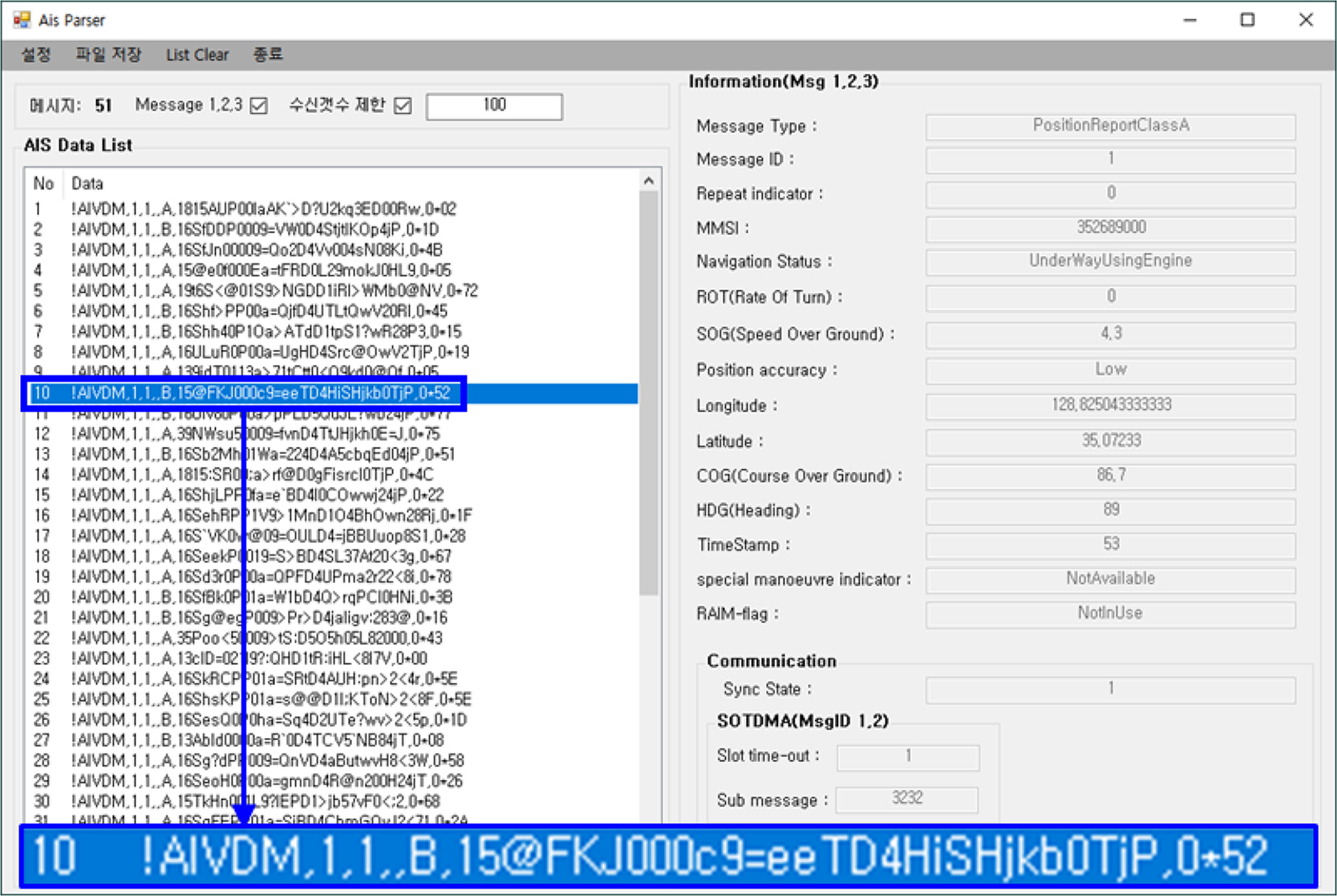
(3) The interface module analyzes the AIS data received in the IEC 61162-1/2(NMEA 0183) sentence format. Based on the analysis, the interface module converts and processes the location of the host ship and the static and dynamic information about other vessels.
(4) If the ship recognition algorithm recognizes another vessel, and that vessel’s location matches the location processed by the interface module, the integrated display module displays the name, speed, and location of that vessel in text format on the camera image layer. For any vessel that was recognized as a marine obstacle but whose accurate location information could not be acquired because the AIS was not installed, only the distance between that vessel and the host ship is displayed.
(5) The collision prediction and fall detection module calculates the distance between the marine obstacle recognized by the ship recognition module and the interface module. It also calculates the location of the predicted collision. In addition, this module monitors dangerous situations, such as when a crew member who is recognized is approaching a set boundary or falls over the guardrail.
(6) The alarm management module receives the data analyzed by the collision prediction and fall detection module and triggers the navigator alarm according to the set risk stages.