


1. 서 론
관성항법장치(INS, Inertial navigation system)는 회전운동을 측정하는 자이로와 비력을 측정하는 가속도계를 사용하여 항체의 자세 및 속도, 위치 정보를 주위 환경에 영향받지 않고 독립적이고 연속적으로 제공한다. 관성항법장치가 제공하는 항법정보는 짧은 시간에는 정확하지만 각속도와 가속도 성분을 적분하여 항법 해를 구하는 특성과 함께 관성 센서 오차 및 초기 정렬 오차의 누적 등에 의하여 시간이 지남에 따라 발산하게 된다. 따라서 관성항법시스템의 항법정보는 장시간 후에는 매우 큰 오차를 포함하게 된다. 이러한 관성센서의 단점을 극복하고 성능을 향상시키기 위하여 외부 보조센서를 이용하여 항법 해를 보정하는 방법이 다양하게 사용되고 있다. GPS(Global positioning system), 속도계, 기압계, 마그네틱 콤파스 등 다양한 보조 센서를 이용하고 있으며 특히 육상에서는 GPS를 이용한 복합항법시스템을 다양하게 구현하여 사용되고 있다(Lee et al., 2004).
수중운동체는 기본적으로 전파가 수중으로 통과하지 못하는 한계점으로 인하여 항법을 위해 LBL(Long baseline), USBL(Ultra short baseline) 등의 초음파 측위 시스템을 이용한다. 이들 초음파 센서는 시간이 경과함에 따라 항법 해가 발산하지는 않지만, 센서의 성능에 의해 결정되는 고정적인 오차를 가지고 있으며, 또한 수중에서의 초음파 전달 특성으로 인한 긴 시간 간격의 샘플링 주기를 가지고 있다. 일반적으로 많이 이용하고 있는 LBL은 성능은 뛰어나지만 센서를 해저에 설치하는 번거로운 작업 및 고가의 비용, 그리고 센서 설치 범위를 벗어난 영역에서는 보조항법으로서 기능을 발휘하지 못하는 단점이 있다. USBL은 저전력, 저가 시스템으로 사용이 편리하고 수중운동체를 추적하며 모니터링하기에는 용이하나, 측정거리가 늘어날 경우에는 현존하는 최고성능의 USBL도 단독으로는 수중 운항제어에 사용하기 곤란하다(Lee et al., 2003a; Lee et al., 2003b).
수중에서 항법 성능을 향상시키기 위한 보조센서로 초음파 도플러 속도 센서인 DVL(Doppler velocity log)을 이용한 복합항법 시스템도 많이 이용되고 있다(Yanrui et al., 2010; Wanli et al., 2013). DVL은 항체의 속도를 측정하는 센서로 관성항법장치의 속도 해가 발산하는 것을 방지하여 향상된 항법 정보를 도출할 수 있고 많이 이용되고 있으나, 센서의 측정 범위가 수심에 따라 결정되기 때문에 수중에서 운항 중 수심이 급격히 깊어지게 되면 속도를 측정하지 못하는 특이점이 발생하는 단점이 있으므로 일반적인 INS-DVL 복합항법으로는 한계점이 있다. 이에 따라 관성항법장치와 보조센서를 융합하기 위한 특별한 알고리즘이 필요하다. 본 논문에서는 GPS전파가 통하지 않는 수중에서 넓은 범위의 운용반경을 가지는 수중운동체의 항법성능을 향상시키기 위한 관성항법장치와 속도 정보를 이용한 복합항법 알고리즘을 개발한다. 수중운동체는 관성항법장치, 심도계, 측심계, DVL을 탑재하게 되며, 이 때 보조항법 정보로 속도를 측정하는 센서는 DVL이 유일하다. 하지만 DVL의 경우 센서 특성에 따라 측정범위가 정해져 있으므로 일반적인 INS-DVL 복합항법으로는 한계점이 있다. 이를 극복하기 위해 수중운동체의 전동기 정보를 이용한 속도 필터를 제안한다. 속도 필터는 기본적으로 DVL, 전동기 정보, 측심계로 구성되고 칼만필터를 이용하여 구현하였다. 속도필터를 통해 출력된 속도 신호는 최종적으로 복합항법 칼만필터의 측정치로 사용이 된다. 제안한 알고리즘 검증을 위하여 궤적생성을 통한 시뮬레이션을 수행하였으며, 최종 결과는 순수항법, 일반적인 복합항법 결과와 비교분석하였다.
2. 수중 복합항법 알고리즘
2.1 관성항법시스템
관성항법시스템은 Non-radiation, Non-jammable 특성을 가지며 외부 환경으로부터 영향을 받지 않는 큰 장점을 가지고 있어 주요 항법 시스템으로 사용된다. 스트랩다운형 관성항법시스템(SDINS, Strapdown inertiel navigation system)의 항법 좌표계(NED, North east down)에서의 속도에 대한 미분방정식을 정리하면 다음과 같다.(Titterton and Weston, 1997)

이 때, 식 (1)에 대한 기호들의 정의는 다음과 같다.



여기서 Vn은 항법 좌표계에서의 속도, fb와  은 각각 항체 좌표계에서 비력과 항법 좌표계로의 변환행렬, 𝛺는 지구자전각속도, L은 위도, l은 경도, gn은 위도에 따른 중력 성분을 나타내며 자세한 설명은 참고문헌을 참조한다.
은 각각 항체 좌표계에서 비력과 항법 좌표계로의 변환행렬, 𝛺는 지구자전각속도, L은 위도, l은 경도, gn은 위도에 따른 중력 성분을 나타내며 자세한 설명은 참고문헌을 참조한다.
은 각각 항체 좌표계에서 비력과 항법 좌표계로의 변환행렬, 𝛺는 지구자전각속도, L은 위도, l은 경도, gn은 위도에 따른 중력 성분을 나타내며 자세한 설명은 참고문헌을 참조한다.식 (1)을 적분하게 되면 NED 좌표계에서의 3축에 대한 위치가 도출되게 되는데 이중 적분을 수행하기 때문에 시간에 지남에 따라 센서 오차가 급격히 누적되어 발산하는 단점을 가진다.
2.2 수중 복합항법 알고리즘 개요
본 논문에서는 관성항법장치의 적분과정에 의한 속도, 위치오차가 누적되는 단점을 보완하기 위해 외부 속도정보를 이용한 수중운동체 복합항법 알고리즘을 제안한다. 일반적으로 수중운동체의 속도 정보를 얻기 위해서는 DVL, EM(Electromagnetic)-log 등이 사용되고 있으며 DVL은 현재 많은 수중운동체의 속도 보조 정보로 사용되고 있고 INS-DVL에 대한 복합항법 연구 또한 활발하게 진행되고 있다. 하지만 DVL은 센서의 특성에 따라 측정 범위가 결정되기 때문에 해저에서 운항 중 수심이 급격히 깊어지게 되면 속도를 정확하게 측정하지 못하는 단점이 있다. 이러한 단점을 보완하기 위하여 DVL의 특성을 고려한 알고리즘이 필요하다. 일반적인 INS- DVL 복합항법 알고리즘의 단점을 해결하기 위해 본 논문에서는 속도 필터를 추가로 설계하였으며 이는 Fig. 1과 같다. 속도필터는 DVL, 전동기의 RPM(Revolutions per minute) 정보, 측심계(ES, Echo sounder)로 구성이 된다. 기본적인 개념은 DVL의 속도 정보 이외에 다른 속도 정보로서 RPM정보를 이용하는 것이다. 속도 필터의 입력값은 DVL의 속도정보, RPM정보, 측심계의 수심 정보이며 출력값은 RPM정보를 속도 정보로 변환하기 위한 환산계수(sf, Scale factor)와 바이어스(Bias)이다. 이 때 환산계수와 바이어스는 DVL의 속도정보를 칼만필터의 측정값으로 사용하여 추정하게 된다. 스위칭 박스(Switching box)에서는 DVL의 속도정보와 변환된 RPM의 속도 정보를 실시간으로 모니터링 하고 있으며, 이 때 측심계의 수심정보를 이용해 DVL이 운용가능한지 판단하여 최종적으로 복합항법 필터의 속도 측정값을 출력한다. 속도 필터에 대한 자세한 내용은 2.3절의 속도필터 설계에서 소개한다.

2.3 필터 설계
칼만 필터는 상태변수의 최적 추정치를 구하는 방법으로 구조가 선형적이고 실제 값의 평균치와 추정 값의 평균치 사이에 바이어스가 없으며 상태변수와 추정 상태변수의 오차 분산을 최소로 하는 특성을 가지고 있다. 이러한 칼만 필터는 가우시안(Gaussian) 분포를 갖는 백색잡음에 의하여 구동되는 선형 시스템에 적용되는 경우 최적 필터로 알려져 있다. 또한 동적 특성을 갖는 시스템의 정보를 통합하는 데 유리하며, 특히 다중 센서를 이용한 항법 시스템 등에 널리 쓰이고 있다(Jhon and Yang, 1976). 본 절에서는 칼만필터를 이용하여 속도필터, 복합항법필터를 설계한다.
(1) 속도 필터
속도 필터의 기본적인 개념은 DVL의 속도 정보 이외에 다른 속도 정보로서 RPM정보를 이용하는 것이다. RPM정보를 이용하여 회전수를 속도 정보로 환산하게 되는 식은 다음과 같다.

여기서 Vk+1은 추정된 속도정보, rpmk는 현재의 회전수, sfk는 DVL 속도정보를 이용하여 RPM정보를 속도정보로 전환하는 환산계수, bk는 RPM의 바이어스를 나타낸다. 즉, 실시간으로 DVL의 정보를 측정치로 사용하여 RPM정보에 대한 환산계수와 바이어스를 추정하며, 만일 DVL이 사용 불가능할 경우 최종적으로 추정한 값을 사용하여 RPM정보를 속도정보로 변환하여 도출하게 된다. 이 때, DVL의 사용 여부는 측심계로 판단하게 된다. Fig. 2는 속도필터의 세부 구성을 나타낸다. udvl, vdvl, wdvl, urpm, vrpm, wrpm은 항법 좌표계에서의 DVL 및 변환된 RPM의 x, y, z 축에 대한 속도를 나타내며, Vdvl, Vrpm은 항체 좌표계에서의 전진방향의 속도를 나타낸다. rev는 수중운동체의 전동기 회전 수, Altitude는 측심계(ES: Echo Sounder)에서 측정한 수심, sf와 bias는 속도필터에서 추정한 전동기 회전수에 대한 환산계수와 바이어스를 추정한 값이다.
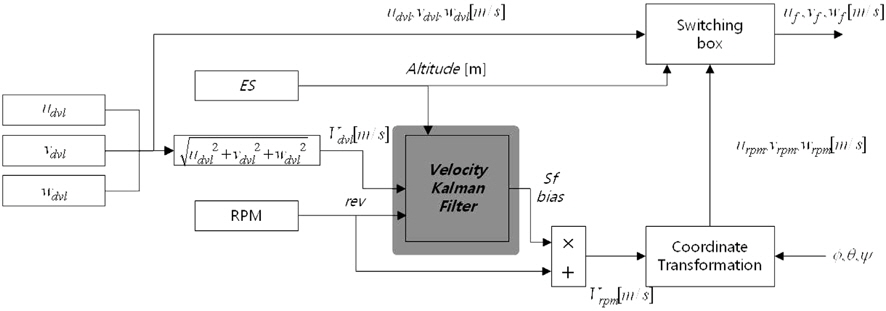
DVL은 자체적으로 방위계와 경사센서를 이용하여 롤 각(ϕ), 피치 각(𝜃), 요 각(𝜓)을 측정하여 항체좌표계에서 측정된 속도를 항법좌표계의 속도로 자체 변환이 가능하다고 가정하였다. 속도필터의 측정값은 DVL의 성분이고 이를 통하여 RPM의 환산계수와 바이어스를 추정하기 위해 동일한 좌표계를 사용하는 것이 요구되며 본 논문에서는 항체 좌표계를 기준으로 필터를 설계하였다. 그 이유는 RPM정보는 항체 좌표계의 전진방향에 대한 속도 성분이라 생각할 수 있기 때문이다. 즉, 속도 필터는 항체 좌표계에서의 DVL 속도정보, RPM 정보로 구성이 되며 항법 좌표계에서의 3축에 대한 DVL 속도를 항체 좌표계의 전진속도로 바꾸기 위한 식은 다음과 같다.

속도 필터의 입력값은 항체 좌표계의 DVL 속도 정보 Vdvl과 RPM정보 rev이며 이에 대한 시스템 방정식은 다음과 같다.

이 때 상태변수 Xk = [Vk sfk bk]T이며 위의 식에서 wk~N( 0,Q)는 가정된 시스템 노이즈로서 평균이 0이고, 분산이 Q인 백색 가우시안 잡음(White gaussian noise)이다. 식 (7)을 매트릭스 형태로 표현하게 되면 다음과 같다.

k번째 시간 스텝에서 얻어지는 측정방정식은 다음과 같이 표현된다.

측정 잡음 vk ∼ N(0,R) 또한 평균이 0이고 분산이 R인 백색 가우시안 잡음으로 정의되어지며 식 (9)를 매트릭스 형태로 표현하면 다음과 같다.

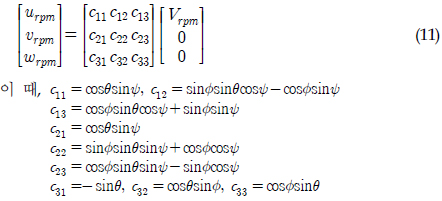
칼만 필터를 통해 추정한 환산계수와 바이어스를 이용하여 식 (6)을 수행하면 항체 좌표계에서의 RPM에 대한 속도 정보를 추정할 수 있다. 그리고 항체 좌표계의 RPM에 대한 속도정보를 오일러 각을 이용하여 변환하게 되면 항법 좌표계의 3축에 대한 속도 정보를 얻을 수 있다. 식 (11)은 좌표계 변환 식을 나타낸다.
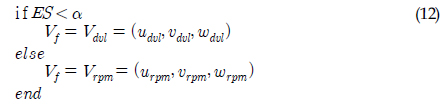
최종적으로 스위칭 박스에는 DVL과 RPM 각각 항법좌표계의 3축에 대한 속도 정보와 수심 정보가 들어가게 되며, 수심에 따라 어떤 속도 정보를 사용할지 판단하여 최종적으로 복합항법 필터의 속도 측정치로 사용하게 되며 이는 식 (12)에 나타나 있다.
(2) 복합항법 필터
속도 필터를 통해 추정된 속도 정보는 최종적으로 복합항법 필터의 속도 측정치로 사용하게 되며 입력값은 가속도계에서 측정하여 좌표 변환을 수행하고 코리올리 힘, 중력 보상을 수행한 가속도이다. 복합항법 필터는 위치, 속도, 가속도계 바이어스를 추정하는 총 9차 필터로 구성된다. 항법 필터의 상태 및 측정 방정식은 다음과 같다.






여기서 xk, yk, zk는 위치정보, uk, vk, wk는 속도정보, bx,k, by,k, bz,k는 측정된 속도정보을 이용한 가속력 바이어스 추정값, fx,k, fy,k, fz,k는 입력 가속도이다.
3. 시뮬레이션
3.1 시뮬레이션 개요
속도필터를 적용한 복합항법 성능을 검증하기 위하여 시뮬레이션을 수행하였다. 다음 Fig. 3은 전체적인 시뮬레이션 순서도를 나타낸다.
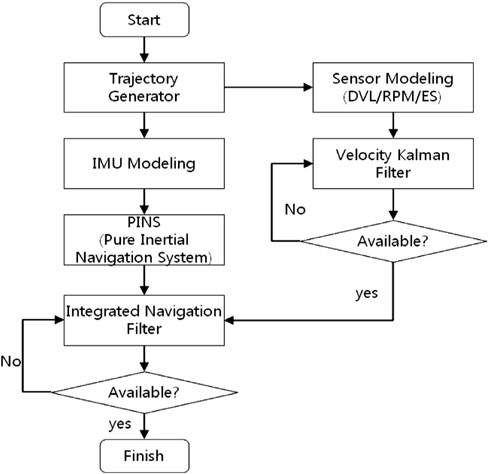
첫 번째로 초기 속도, 순항 속도, 주행 시간 등의 정보만으로 위치, 자세를 가정하여 궤적을 생성하고 생성된 궤적을 바탕으로 역으로 관성항법을 수행하여 IMU(Inertial measurement unit)를 모델링 한다. 이 때, 궤적생성에서 만들어진 위치해를 차분하여 속도를 계산하고 속도를 차분하고 중력가속도를 추가하여 가속도계 신호를 생성하게 되는데 이때 코리올리 보정 등이 사용되었다. 자이로의 각속도 신호는 자세를 차분하여 생성하였으며 매 샘플마다 중력가속도, 지구중력가속도, 지구 타원반경을 업데이트 한다. 생성된 IMU 신호를 바탕으로 순수 관성항법을 수행하여 위치, 속도, 자세를 도출하게 되며 이 때 코닝, 스컬링 등 정밀 오차요소도 포함하여 항법해를 도출한다. 이와 동시에 복합항법을 위한 보조 센서 정보를 모델링하는데 궤적생성에서 만들어진 위치해를 차분해 도출한 속도 정보를 이용해 DVL과 RPM신호를 모델링하며 측심계는 전체 시뮬레이션 시간을 고려하여 따로 모델링 한다. 이 보조항법 정보를 이용해 본 논문의 핵심인 속도 필터를 수행하게 되고 이 때 출력된 속도 값은 최종적으로 복합항법 필터의 측정값으로 사용된다.
3.2 시뮬레이션 환경
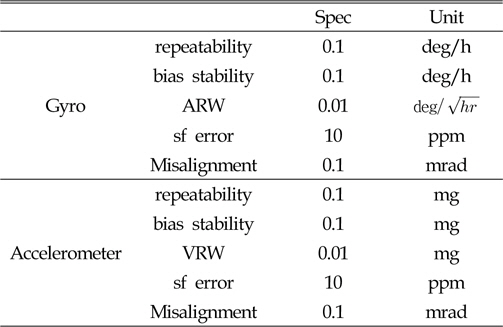
Mathwork사의 매틀랩을 이용하여 시뮬레이션 결과를 도출하였으며 궤적 생성 및 복합항법 알고리즘은 M-code를 이용하여 구현하였다. 시뮬레이션을 수행할 때 모든 계산은 100Hz로 계산하였으며, DVL신호는 5Hz로 모델링 하여 계산을 수행하였다. IMU는 0.1deg/hr 급이라 가정하여 모델링을 수행하였으며, 이미 검증이 되고 정확한 스펙이 존재하는 Honeywell사의 HG1700(1deg/hr) 모델에 대한 오차 특성을 10배 정도 좋은 성능으로 생성하였다. Table 1은 모델링에 사용한 IMU의 오차 특성을 나타낸다.
본 논문에서는 보조항법 정보에 대하여 간단하게 모델링을 수행하였다. DVL의 속도 정보는 궤적생성에서 차분을 통해 얻은 속도 정보에 에러 요소를 추가하여서 모델링하였다.
DVL의 속도정보는 기본적으로 0.2%의 오차가 있다고 가정하였고 시뮬레이션을 수행할 때마다 ±0.2% 사이의 오차값을 가지게 모델링 하였다. 바이어스 오차는 시뮬레이션 수행 시 ±0.5m/s의 오차를 포함하도록 하고 노이즈 오차를 추가하였다. DVL 속도정보의 모델링은 다음 식 (19-21)에 나타나 있다.



위 식에서 sf는 환산계수 오차, b는 바이어스 오차, w는 백색잡음을 나타낸다. DVL의 속도정보가 운용 가능한 범위는 수중운동체를 기준으로 수심 100m라고 가정하였고, 이를 넘을 시 DVL의 속도정보에 ±5m/s 정도의 노이즈를 임의로 추가하였다. RPM정보 또한 궤적생성을 통하여 도출한 속도정보를 통하여 모델링 하였다. 측심계의 경우 수심 100m를 기준으로 총 시뮬레이션 시간을 고려하여 2 구간에서 DVL의 운용범위를 벗어나도록 모델링 하였다. 시뮬레이션 총 시간은 27분이고 수중운동체의 속도는 10노트로 설정하였다.
3.3 시뮬레이션 결과
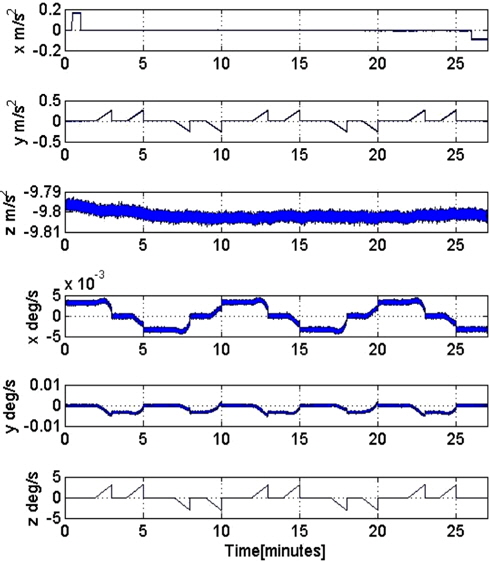
각속도를 바탕으로 자세를 도출하였고 이는 Fig. 6에 나타나 있다. 생성된 각속도, 가속도를 바탕으로 코닝, 스컬링 등 정밀 오차까지 고려하여 순수항법을 실행하였고 이는 Fig. 7에 나타나 있다. 예상했던 대로 순수항법 결과는 오차의 누적에 따라 발산하는 경향을 보인다.


이러한 단점을 보완하기 위해 속도 필터를 설계하였고 입력값인 DVL의 속도, RPM정보, 측심계의 수심 정보는 Fig. 8과 9에 나타나 있다. Fig. 8을 보게 되면 약 5~8분 구간, 15~16분 구간 동안 총 4분여 동안 DVL의 운용 범위를 벗어난 곳을 모델링 한 것을 알 수 있다. DVL의 운용범위는 3.2절에서 명시한 바와 같이 100m라 가정하였고, 이 때 측심계의 데이터를 보면 100m를 넘어선 구간을 모델링한 것을 알 수 있다. 모델링한 보조 항법 정보를 통하여 속도 칼만 필터를 적용하였을 경우 칼만필터의 추정치인 RPM의 속도 변환에 대한 환산계수와 바이어스는 Fig. 10에 나타나 있다.
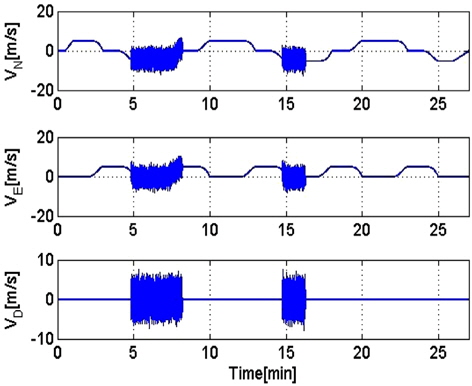

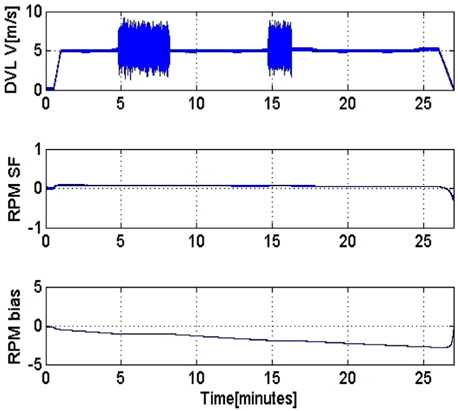
Fig. 10의 첫 번째 그래프는 항법좌표계에서 항체좌표계의 전진속도를 나타내는 DVL의 속도를 나타내고 실시간으로 추정되는 환산계수와 바이어스는 두 번째, 세 번째 그래프에 나타나 있다. 환산계수를 추정하는 과정을 보게 되면 DVL이 운용 가능한 구간에는 실시간으로 RPM정보에 대한 환산계수와 바이어스를 추정하다가 운용 구간을 벗어났을 경우 최종 추정값을 사용하는 것을 볼 수 있다. 최종적으로 추정한 환산계수와 바이어스를 이용하여 RPM의 회전수 정보를 속도 정보로 변환한 후, 좌표변환을 이용하여 항법 좌표계에서의 DVL 속도와 비교한 결과는 Fig. 11에 나타나 있다. 실선은 DVL에서 측정한 속도를 나타내며 점선은 RPM 회전수를 이용한 속도 정보를 나타낸다. 예상했던 결과대로 DVL은 운용 범위를 넘어서면 속도값이 신뢰할수 없을 정도로 노이즈가 추가되지만 이 때, RPM 정보를 이용한 속도 정보는 잘 추정되고 있는 것을 볼 수 있다. 좌표 변환을 할 시 오일러 각을 사용하기 때문에 약간 발산하는 경향이 있지만 충분히 복합항법 필터의 속도 측정치로 사용 될 수 있는 결과를 보여준다. 최종적인 복합항법 결과는 Fig. 12에서 보여주고 있다. 얇은 실선은 궤적생성을 통한 정답, 굵은 점선은 속도필터를 적용한 항법 결과, 굵은 실선은 순수 항법결과, 얇은 점선은 속도필터를 적용하지 않은 일반적인 INS-DVL 복합 항법 결과를 보여주고 있다. 예상했던 대로 속도 필터를 적용한 복합항법 결과는 순수항법 및 일반적인 INS-DVL 복합항법에 비하여 상당히 많은 오차가 줄어든 것을 볼 수 있다. 실제 DVL 센서를 사용하였을 경우 측정범위를 벗어난 구간에서의 데이터에 따라 오차가 더 증가할 수도 있지만 일단 속도 보정을 통하여 발산하지 않고 순수항법보다 훨씬 더 좋은 성능을 나타냄을 볼 수 있다.


4. 결 론
본 논문에서는 GPS전파가 통하지 않는 수중에서 넓은 범위의 운용반경을 가지는 수중운동체의 항법성능을 향상시키기 위한 관성항법장치와 속도 정보를 이용한 복합항법 알고리즘을 개발하였다. 이 때 속도 정보는 일반적인 보조센서만을 사용하지 않고 운동체의 전동기 회전 수를 이용한 속도 필터를 설계하여 보다 더 향상된 항법 성능을 도출할 수 있도록 알고리즘을 제안하였다. 제안한 알고리즘은 시뮬레이션을 통하여 검증하였으며 시뮬레이션 결과 순수항법, 일반적인 복합항법에 비하여 뛰어난 성능을 발휘함을 알 수 있었다.
추후 과제로서 보조센서를 더 정밀하게 모델링하는 작업이 필요한데 여기에는 정밀한 DVL신호 모델링 및 실제 전동기 특성을 고려한 RPM 모델링 등이 있다. 특히 DVL이 운용범위를 벗어났을 시 출력값을 실제 센서의 특성에 맞게 모델링한 후, 검증하는 작업이 필요하다. 또한 현재 2차원으로 수행한 시뮬레이션을 심도 정보까지 포함하여 3차원으로 확장하고 최종적으로 시뮬레이션이 아닌 실제 실험을 통하여 제안한 알고리즘에 대한 검증이 필요하다.




