1. м„ң лЎ
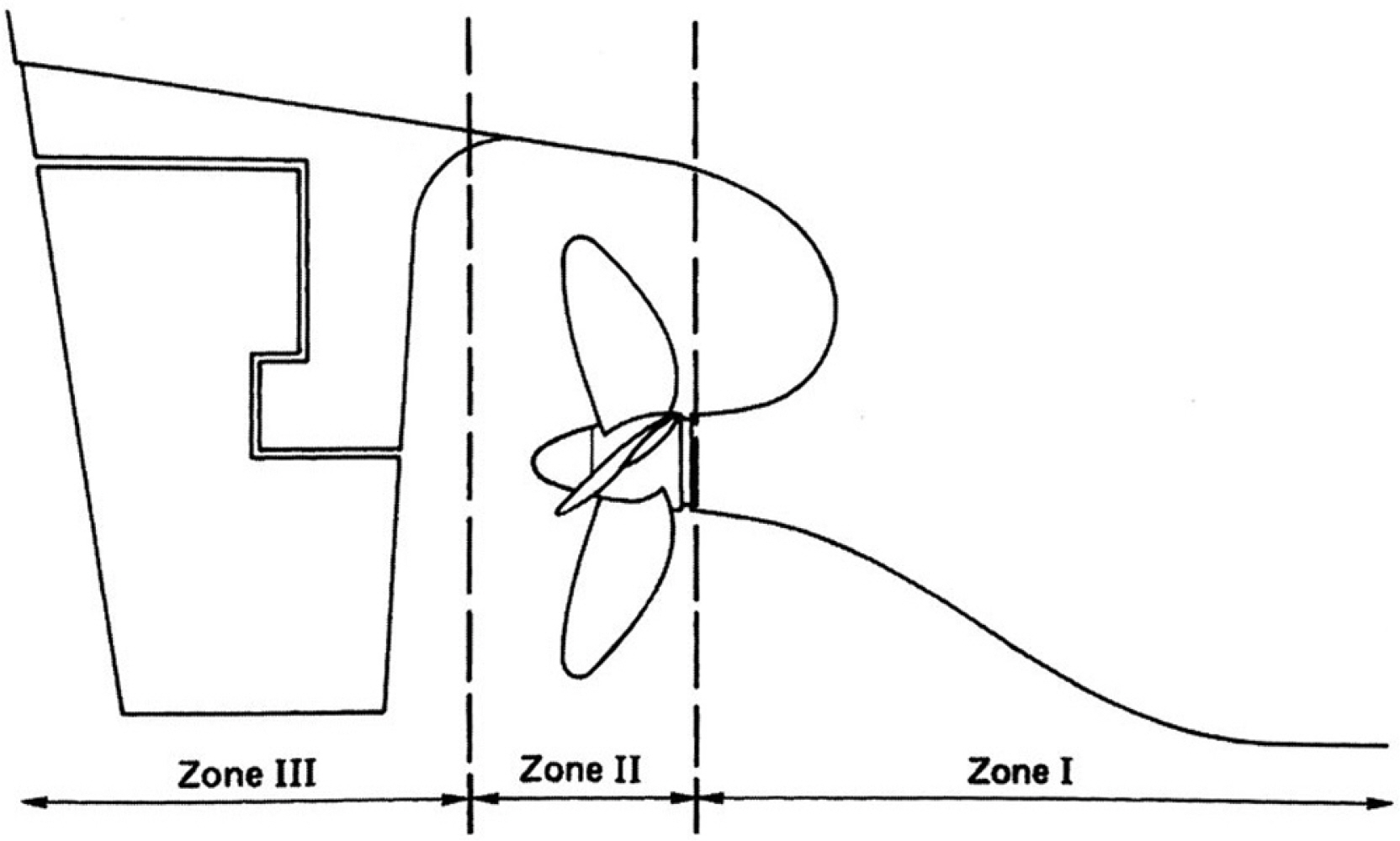
м „ м„ёкі„м ҒмңјлЎң нҷҳкІҪмҳӨм—јм—җ лҢҖн•ң кҙҖмӢ¬мқҙ лҶ’м•„м§җм—җ л”°лқј көӯм ңн•ҙмӮ¬кё°кө¬мқё IMO(International Maritime Organization)м—җм„ңлҠ” EEDI (Energy efficiency design index)лқјлҠ” м§Җн‘ңлҘј м ңмӢңн•ҳм—¬ м„ л°•мқҙ лӮҙлҠ” мқҙмӮ°нҷ”нғ„мҶҢ л°°м¶ңмқ„ к·ңм ңн•ҳкі мһҲлӢӨ. мқҙм—җ л”°лқј ESD(Energy saving device, м—җл„Ҳм§Җ м Җк°җ мһҘм№ҳ)м—җ лҢҖн•ң м—°кө¬к°Җ нҷңл°ңнһҲ 진н–үлҗҳкі мһҲлӢӨ. Carlton(1994)мқҖ лӢӨм–‘н•ң ESDлҘј н”„лЎңнҺ лҹ¬ м „л°©(Zoneв… ), н”„лЎңнҺ лҹ¬(Zoneв…Ў), н”„лЎңнҺ лҹ¬ нӣ„л°©(Zoneв…ў)м—җ л¶Җм°©лҗҳлҠ” ESDлЎң лӮҳлҲ„м—ҲлӢӨ(Fig. 1). к·ёлҰ¬кі ліё м—°кө¬м—җм„ңлҠ” мқҙлҘј к°Ғк°Ғ Pre-device, Main-device, Post-deviceлқјкі лӘ…н•ҳкІ лӢӨ.
лҢҖн‘ңм Ғмқё Pre-deviceлЎңлҠ” Pre-swirl stator(PSS), Pre-swirl duct (PSD) л“ұмқҙ мһҲмңјл©°, Main-deviceлЎңлҠ” Tip Rake propeller(TRP), Contra-rotating propeller(CRP), к·ёлҰ¬кі Post-deviceлЎңлҠ” 비лҢҖм№ӯ нғҖ(Twisted rudder), лҹ¬лҚ” лІҢлёҢ(Rudderbulb) л“ұмқҙ м•Ңл Өм ё мһҲлӢӨ.
ліё м—°кө¬лҠ” ESD мӨ‘ Post-deviceм—җ лҢҖн•ң м—°кө¬лЎң лҹ¬лҚ” лІҢлёҢ(Rudder bulb, лІҢлёҢ) л°Ҹ н”„лЎңнҺ лҹ¬ мәЎ(Cap, мәЎ)мқ„ ліөн•©м ҒмңјлЎң м„Өкі„н•ҳм—¬ CFD(Computational fluid dynamics)лҘј нҶөн•ң м„ л°•мқҳ м „лӢ¬лҸҷл Ҙ к°җмҶҢлҘј нҷ•мқён•ҳмҳҖлӢӨ.
лҹ¬лҚ” лІҢлёҢлҠ” м„ л°•мқҳ м—җл„Ҳм§Җ нҡЁмңЁмқ„ мғҒмҠ№мӢңнӮӨкё° мң„н•ҙ л„җлҰ¬ мӮ¬мҡ©лҗҳкі мһҲлҠ” ESDлЎң, мқјл°ҳм ҒмңјлЎң м•Ңл Ө진 лҹ¬лҚ” лІҢлёҢмқҳ мң мІҙлҸҷм—ӯн•ҷм Ғ нҡЁкіјлҠ” лӢӨмқҢкіј к°ҷлӢӨ(Okada et al., 2015).
(1) Hub vortex к°җмҶҢ
(2) н”„лЎңнҺ лҹ¬лЎң мқён•ң нӣ„лҘҳмқҳ мҲҳ축 к°җмҶҢ
(3) л°ҳлҘҳ мқҙл“қмңјлЎң мқён•ң м„ к°ҒнҡЁмңЁ н–ҘмғҒ
мҙҲкё° лҹ¬лҚ” лІҢлёҢлҠ” Costa bulbмҷҖ к°ҷмқҖ кө¬нҳ• лІҢлёҢлЎң м„Өкі„лҗҳм–ҙ мқјл°ҳм Ғмқё кө¬нҳ• н”„лЎңнҺ лҹ¬ мәЎкіј н•Ёк»ҳ мӮ¬мҡ©лҗҳм—ҲлӢӨ(Mewis and Deichmann, 2013). к·ёлҹ¬лӮҳ мң„мҷҖ к°ҷмқҖ лІҢлёҢ нҡЁкіјлҘј лҚ”мҡұ н–ҘмғҒмӢңнӮӨкё° мң„н•ҙ лҹ¬лҚ” лІҢлёҢлҝҗл§Ң м•„лӢҲлқј нғҖ(Rudder) л°Ҹ н”„лЎңнҺ лҹ¬ мәЎмқҙ ліөн•©м ҒмңјлЎң к°ңм„ лҗҳм—Ҳкі , к·ём—җ л”°лқј лӢӨм–‘н•ң Post-deviceк°Җ к°ңл°ңлҗҳм—ҲлӢӨ.
Nielsen et al.(2012)лҠ” м„ мІҙлҘј м ңмҷён•ң Conventional rudderм—җ Kappel propeller л°Ҹ лҹ¬лҚ” лІҢлёҢлҘј мӮ¬мҡ©н•ҳм—¬ м„Өкі„ мҶҚлҸ„ 18.5л…ёнҠё(34.262km/h)м—җм„ң м•Ҫ 9.3%мқҳ Specified MCR(Maximun continuous rating) к°җмҶҢ нҡЁкіјлҘј CFDлҘј нҶөн•ҙ нҷ•мқён•ҳмҳҖлӢӨ. Kim et al.(2014)лҠ” 13,000TEU м»Ён…Ңмқҙл„Ҳм„ мҡ© 비лҢҖм№ӯ нғҖм—җ лІҢлёҢмҷҖ Thrust finмқ„ м Ғмҡ©н•ҳм—¬ м•Ҫ 2% нҡЁмңЁ мҰқк°ҖлҘј мӢӨн—ҳмңјлЎң нҷ•мқё н•ҳмҳҖлӢӨ. Cha(2017)м—җм„ңлҠ” KCS(KRISO container ship)м„ л°•м—җ лҹ¬лҚ” лІҢлёҢмқҳ нҒ¬кё°м—җ л”°лҘё нҡЁмңЁмқ„ 비көҗн•ҳмҳҖлӢӨ. к·ё кІ°кіј лІҢлёҢмқҳ м§ҒкІҪмқҙ н”„лЎңнҺ лҹ¬ н—ҲлёҢ м§ҒкІҪмқҳ 0.9% мқј л•Ң м•Ҫ 1.6% нҡЁмңЁ мҰқк°ҖлҘј CFDлҘј нҶөн•ҙ нҷ•мқён•ҳмҳҖлӢӨ.
к·ёлҹ¬лӮҳ ліҙлӢӨ нҡЁмңЁм Ғмқё ESDк°ңл°ңмқ„ мң„н•ҳм—¬ мәЎкіј лІҢлёҢ мӮ¬мқҙ к°„к·№, лІҢлёҢ нҳ•мғҒ, нҒ¬кё° л“ұ Post-deviceлҘј м„ёл¶Җм ҒмңјлЎң лӮҳлҲ„м–ҙ лӢӨк°Ғм Ғмқё мғҒнҳё мҳҒн–Ҙ 분м„қмқҙ н•„мҡ”н•ҳлӢӨ. мқҙм—җ л”°лқј ліё м—°кө¬м—җм„ңлҠ” лҢҖмғҒм„ мқё 3,600TEUгҖҖKCSмқ„ кё°мӨҖмңјлЎң Post-deviceлҘј 2к°Җм§Җ(лҹ¬лҚ” лІҢлёҢ, мәЎ)лЎң лӮҳлҲ„м–ҙ м„Өкі„н•ҳмҳҖлӢӨ. Post-deviceмқҳ нҡЁмңЁ мҰқлҢҖлҘј мң„н•ҙ нғҖлҠ” м„ н–үм—°кө¬мқё Tae(2017)м—җм„ң мӢӨн—ҳ л°Ҹ CFDлҘј нҶөн•ҙ м „лӢ¬лҸҷл Ҙ к°җмҶҢ нҡЁкіјк°Җ мһ…мҰқлҗң 비лҢҖм№ӯ нғҖлҘј мӮ¬мҡ©н•ҳмҳҖмңјл©°, 추к°Җм ҒмңјлЎң 비лҢҖм№ӯ нғҖмқҳ л¶Ҳм—°мҶҚ лӢЁл©ҙмқ„ нҸ¬н•Ён•ҳлҠ” лҹ¬лҚ” лІҢлёҢ л°Ҹ нӣ„лҘҳмқҳ мҲҳ축мқ„ м–өм ңн•ҳлҠ” л°ңмӮ°нҳ• н”„лЎңнҺ лҹ¬ мәЎмқ„ мӮ¬мҡ©н•ҳм—¬ нҡЁмңЁ мғҒмҠ№мқ„ кё°лҢҖн•ҳмҳҖлӢӨ. Post-deviceмқҳ нҡЁмңЁ 비көҗлҠ” Bare hull лҢҖ비 м „лӢ¬лҸҷл Ҙмқҙ к°ҖмһҘ м ҒмқҖ caseлҘј лӘ©м Ғн•ЁмҲҳлЎң л‘җм—Ҳмңјл©°, мһҗн•ӯмҡ”мҶҢ 분м„қмқ„ нҶөн•ң нҡЁмңЁ мғҒмҠ№ мӣҗмқёмқ„ 분м„қн•ҳмҳҖлӢӨ. 추нӣ„ мөңм Ғ м„Өкі„лҗң Post-deviceлҘј м ңмһ‘н•ҳм—¬ лӘЁнҳ•мӢңн—ҳмқ„ нҶөн•ң мһҗн•ӯ м„ұлҠҘмқ„ кІҖмҰқн• мҳҲм •мқҙлӢӨ.
2. Post-device м„Өкі„
2.1 비лҢҖм№ӯ нғҖ
ліё м—°кө¬м—җ мӮ¬мҡ©лҗң нғҖлҠ” м„ н–үм—°кө¬мқё Tae(2017)м—җм„ң м„Өкі„лҗң Prototype 비лҢҖм№ӯ нғҖмқҙлӢӨ. Tae(2017)м—җм„ңлҠ” CFDн•ҙм„қмқ„ нҶөн•ҙ 비лҢҖм№ӯ нғҖм—җ мң мһ…лҗҳлҠ” мһ…мӮ¬к°Ғмқ„ нҢҢм•…н•ң нӣ„ м„Өкі„н•ҳкі мһҗ н•ҳмҳҖмңјлӮҳ, 비нӢҖлҰј к°Ғмқҙ 30В°мқҙмғҒ кіјлҸ„н•ҳкІҢ кІ°м •лҗҳм–ҙ м°Ём„ мұ…мңјлЎң к°ҖмһҘ мқјл°ҳм ҒмңјлЎң мӮ¬мҡ©н•ҳлҠ” Prototype 5В°мқҳ 비лҢҖм№ӯ нғҖлҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. Kim et al.(2009)мқҖ мң м „мһҗ м•Ңкі лҰ¬мҰҳмқ„ кё°лІ•мқ„ мӮ¬мҡ©н•ҳм—¬ 12,000TEU м»Ён…Ңмқҙл„Ҳм„ мқ„ лҢҖмғҒмңјлЎң мәҗ비н…Ңмқҙм…ҳмқҙ к°ҖмһҘ м ҒмқҖ 비лҢҖм№ӯ нғҖлҘј м„Өкі„н•ҳмҳҖлӢӨ. м—°кө¬ кІ°кіј 비нӢҖлҰј к°Ғ 7~8лҸ„м—җм„ң к°ҖмһҘ м ҒмқҖ мәҗ비н…Ңмқҙм…ҳмқҙ л°ңмғқлҗҳлӮҳ мқҙ кІҪмҡ° нҡЁмңЁ л°Ҹ м Җн•ӯкҙҖм җм—җм„ң л¶ҲлҰ¬н•ҳм—¬ мқјл°ҳм Ғмқё 비нӢҖлҰј к°Ғмқё 5В°лҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. Heo(2017)мқҖ 3,600TEU KCS м„ л°•м—җ нҳјнғҖ(Semi-spade rudder)лҢҖ비 мҡ°мҲҳн•ң м „лӢ¬лҸҷл Ҙ к°җмҶҢ л°Ҹ м–‘н•ӯ비лҘј к°Җм§ҖлҠ” 비лҢҖм№ӯ нғҖлҘј м„Өкі„н•ҳмҳҖлӢӨ. 비лҢҖм№ӯ нғҖмқҳ м„Өкі„ мӢң м Җмһҗмқҳ мӢӨм„ л№„лҢҖм№ӯ нғҖ м„Өкі„ мӢңмқҳ кІҪн—ҳмқ„ нҶ лҢҖлЎң н‘ңмӨҖмңјлЎң мӮ¬мҡ©н•ҳлҠ” 비нӢҖлҰј к°Ғ 5В°лҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ.
비лҢҖм№ӯ нғҖлҠ” м „нғҖ(Full-spade rudder)мқҳ мқјмў…мңјлЎңмҚЁ нҳјнғҖмқҳ к°„к·№м—җм„ң л°ңмғқн•ҳлҠ” мәҗ비н…Ңмқҙм…ҳ л¬ём ң л°Ҹ нҳј(Horn) л’·л¶Җ분м—җ л°ңмғқн•ҳлҠ” мҷҖлҘҳлҘј м°ЁлӢЁн•ҙ мЈјлҠ” мһҘм җмқҙ мһҲлӢӨ. ліё м—°кө¬м—җ мӮ¬мҡ©лҗң нҳјнғҖ л°Ҹ 비лҢҖм№ӯ нғҖмқҳ нҳ•мғҒмқҖ Fig. 2мҷҖ к°ҷмңјл©°, мһҗм„ён•ң м ңмӣҗмқҖ Table 1кіј к°ҷлӢӨ.
2.2 лҹ¬лҚ” лІҢлёҢ л°Ҹ н”„лЎңнҺ лҹ¬ мәЎмқҳ м„Өкі„
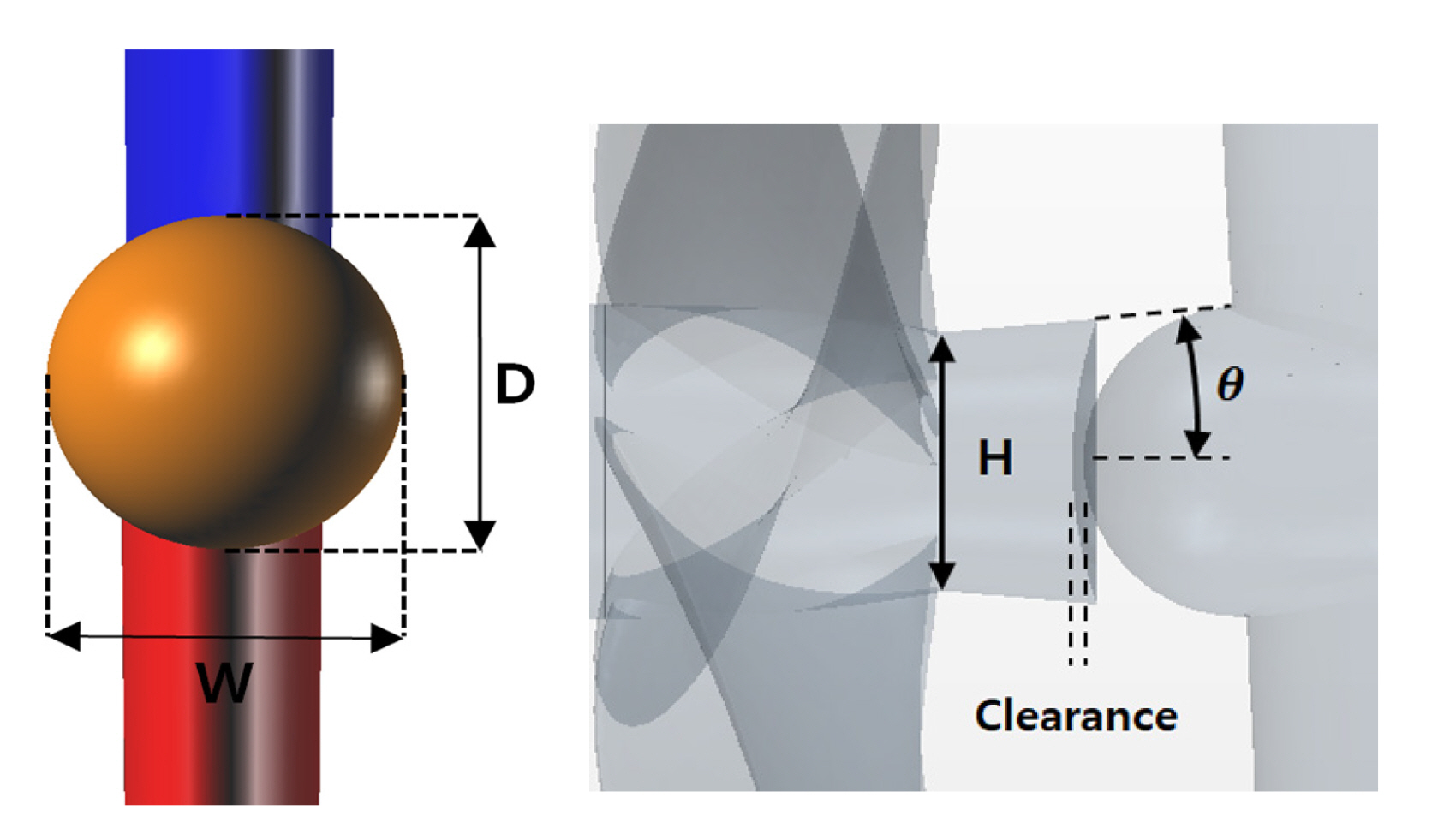
Fig. 3мқҖ лҹ¬лҚ” лІҢлёҢ л°Ҹ мәЎмқҳ кё°нҳём—җ кҙҖн•ң м •мқҳмқҙлӢӨ. WлҠ” лҹ¬лҚ”лІҢлёҢмқҳ к°ҖлЎңл°©н–Ҙ м§ҒкІҪ, DлҠ” лҹ¬лҚ” лІҢлёҢмқҳ м„ёлЎңл°©н–Ҙ м§ҒкІҪ, HлҠ” н•ҳлҘҳл°©н–Ҙмқҳ н—ҲлёҢ м§ҒкІҪ, ОёлҠ” мәЎмқҳ к°ҒлҸ„мқҙлӢӨ. лҹ¬лҚ” лІҢлёҢмҷҖ мәЎмқҖ н”„лЎңнҺ лҹ¬ нӣ„лҘҳмқҳ мҲҳ축мқ„ м–өм ңн•ңлӢӨлҠ” кҙҖм җм—җм„ң лҸҷмқјн•ң лӘ©м Ғмқ„ к°Җм§җмңјлЎң н•ҳлӮҳмқҳ ESDмІҳлҹј м„Өкі„н•ҳмҳҖлӢӨ. мҰү, мәЎмқ„ л”°лқј л°ңмӮ°лҗң нқҗлҰ„мқҙ лҹ¬лҚ” лІҢлёҢм—җ мң м„ нҳ•мңјлЎң мқҙм–ҙм§Ҳ мҲҳ мһҲлҸ„лЎқ мәЎмқҳ к°ҒлҸ„мҷҖ лІҢлёҢмқҳ м§ҒкІҪмқ„ н•ҳлӮҳмқҳ ліҖмҲҳлЎң м„Өкі„н•ҳмҳҖлӢӨ. лҹ¬лҚ” лІҢлёҢмқҳ нӣ„лҘҳл°©н–Ҙ кёёмқҙлҠ” 비лҢҖм№ӯ нғҖмқҳ мөңлҢҖ л‘җк»ҳ м§Җм җк№Ңм§Җ м„Өкі„н•ҳм—¬ 비лҢҖм№ӯ нғҖмқҳ мғҒл¶ҖмҷҖ н•ҳл¶Җ л¶Ҳм—°мҶҚл©ҙмқ„ нҸ¬н•Ён•ҳмҳҖлӢӨ. лҳҗн•ң н”„лЎңнҺ лҹ¬лЎң мқён•ҙ мҲҳ축лҗҳлҠ” нӣ„лҘҳлҘј ліҙмҷ„н•ҙ мЈјкё° мң„н•ҙ мәЎмқҖ л°ңмӮ°нҳ•мңјлЎң(Оё>0), лҹ¬лҚ” лІҢлёҢмқҳ м§ҒкІҪмқҖ н—ҲлёҢліҙлӢӨ нҒ¬кІҢ(W, D>1H) м„Өкі„н•ҳмҳҖлӢӨ. к·ё нӣ„ Table 2мҷҖ к°ҷмқҙ 4к°Җм§Җ CaseлҘј м„ м •н•ҙ мәЎкіј лІҢлёҢмқҳ м„ұлҠҘмқ„ 비көҗн•ҳмҳҖмңјл©°, 2.2.1~2.2.4м Ҳм—җлҠ” Caseм—җ лҢҖн•ң м„Өкі„ л°©лІ•мқ„, 4.2.1~4.2.4м Ҳм—җлҠ” Caseм—җ лҢҖн•ң м „лӢ¬лҸҷл Ҙ 비көҗ л°Ҹ нҡЁмңЁ ліҖнҷ” мӣҗмқёмқ„ лӮҳнғҖлӮҙм—ҲлӢӨ. Case 1м—җм„ңлҠ” лҹ¬лҚ” лІҢлёҢмҷҖ мәЎмқҳ к°„к·№м—җ л”°лҘё м„ұлҠҘмқ„ нҷ•мқён•ҙ ліҙм•ҳкі , Case 2м—җм„ңлҠ” Mewis and Deichmann(2013)мҷҖ Shin et al.(2012)мІҳлҹј кө¬нҳ• лІҢлёҢмҷҖ нҸүн–үн•ң лІҢлёҢк°Җ мЎҙмһ¬н•ҳкё°м—җ ліё м—°кө¬мқҳ лҢҖмғҒм„ м—җ м Ғн•©н•ң лІҢлёҢ нҳ•мғҒмқ„ нҷ•мқён•ҙ ліҙм•ҳлӢӨ. Case 3м—җм„ңлҠ” лІҢлёҢмқҳ м§ҒкІҪмқ„ 1.1Hл¶Җн„° нӮӨмӣҢк°Җл©ҙм„ң мөңм Ғ м§ҒкІҪмқ„ м°ҫм•„ліҙм•ҳмңјл©°, Case 4м—җм„ңлҠ” нҡҢм „н•ҳлҠ” нӣ„лҘҳлҘј м–өм ңн•ҳм—¬ кі§кІҢ л»—м–ҙмЈјлҸ„лЎқ лІҢлёҢмқҳ к°ҖлЎңл°©н–Ҙ кёёмқҙлҘј нӮӨмӣҢ м„ұлҠҘмқ„ нҷ•мқён•ҙ ліҙм•ҳлӢӨ.
мөңмў…м ҒмңјлЎң 50mmк°„к·№м—җ 5В°мқҳ л°ңмӮ°к°Ғмқ„ к°Җм§ҖлҠ” мәЎ, D=1.2H, W=1.4Hмқё 비лҢҖм№ӯ кө¬нҳ• лІҢлёҢм—җм„ң Bare hullлҢҖ비к°ҖмһҘ лҶ’мқҖ 2.05%мқҳ м „лӢ¬лҸҷл Ҙ к°җмҶҢлҘј ліҙмҳҖлӢӨ.
2.2.1 лҹ¬лҚ” лІҢлёҢмҷҖ мәЎ мӮ¬мқҙ к°„к·№м—җ л”°лҘё м„Өкі„ (Case 1)
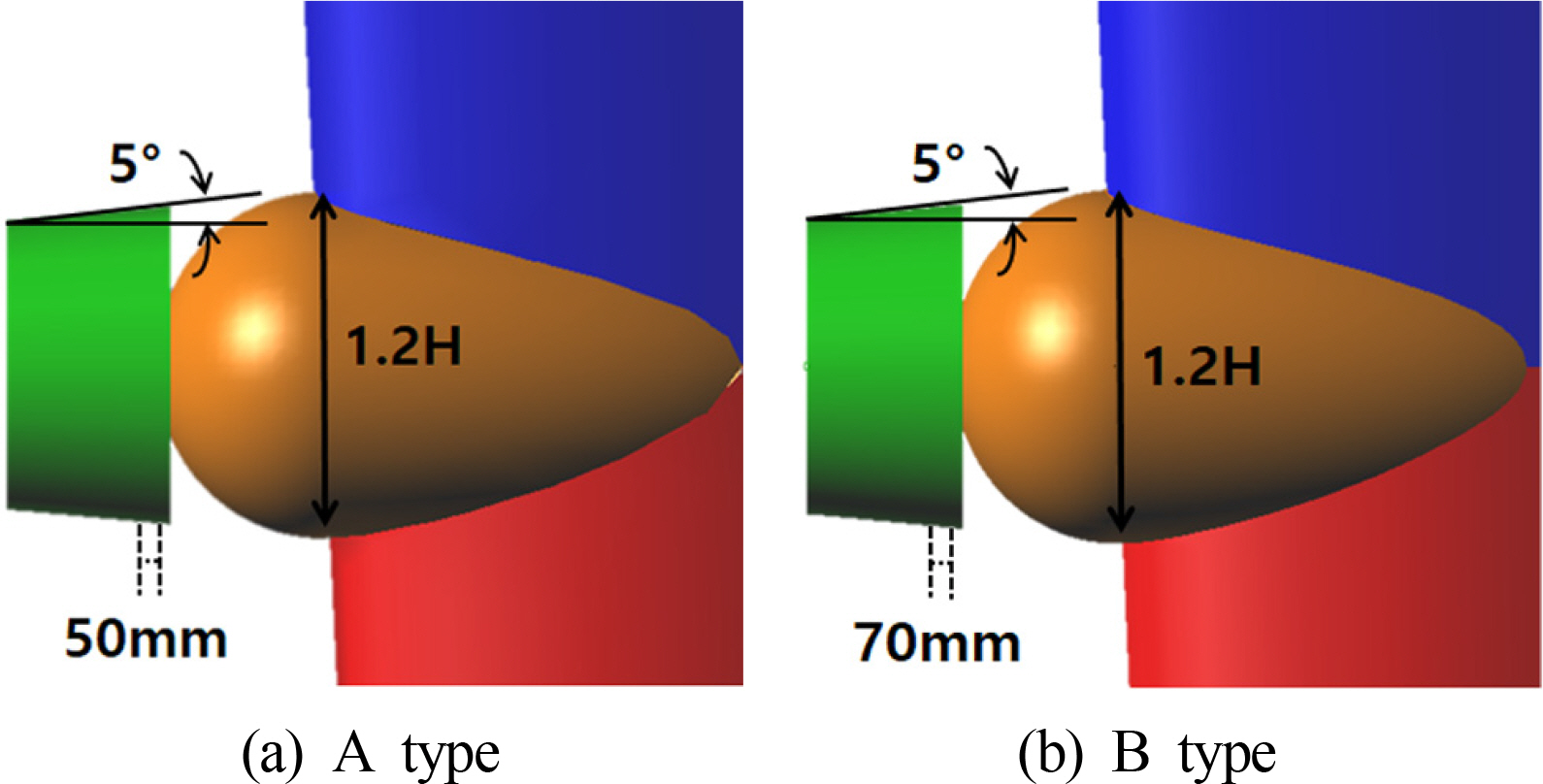
лҹ¬лҚ” лІҢлёҢмҷҖ мәЎ мӮ¬мқҙмқҳ к°„к·№мқ„ мӢӨм„ кё°мӨҖ 50mmмҷҖ 70mmлЎң м •н•ҳм—¬ мһҗн•ӯ м„ұлҠҘмқ„ 비көҗн•ҳмҳҖлӢӨ(Table 7). мқҙл•Ң мҙҲкё° лҹ¬лҚ” лІҢлёҢмқҳ нҒ¬кё°лҠ” нғҖ кё°кҙҖкіјмқҳ лҹ¬лҚ” лІҢлёҢ м„Өкі„ кІҪн—ҳмқ„ нҶ лҢҖлЎң 1.2HлЎң м •н•ҳмҳҖмңјл©° 4.2.3м Ҳм—җм„ң 추к°Җм Ғмқё Case studyлҘј нҶөн•ҙ лҹ¬лҚ” лІҢлёҢ нҒ¬кё°лҘј мөңм Ғнҷ” н•ҳмҳҖлӢӨ.
лҸҷмқјн•ң мЎ°кұҙн•ҳм—җм„ң 비көҗн•ҳкё° мң„н•ҙ лҹ¬лҚ” лІҢлёҢмқҳ нҒ¬кё° л°Ҹ мәЎ к°ҒлҸ„лҠ” лҸҷмқјн•ҳкІҢ л‘җм—Ҳмңјл©°, лӘЁлҚёл§ҒмқҖ Fig. 4мҷҖ к°ҷлӢӨ. к°„к·№м—җ л”°лҘё м„ұлҠҘ 비көҗ кІ°кіј 50mmмқҳ к°„к·№м—җм„ң 70mmліҙлӢӨ м•Ҫ 0.4% мҡ°мҲҳн•ң м „лӢ¬ лҸҷл Ҙ к°җмҶҢлҘј ліҙмҳҖмңјл©°, мқҙлҘј Case2~4мқҳ кі м •ліҖмҲҳлЎң л‘җм—ҲлӢӨ. Case studyм—җ л”°лҘё мһҗм„ён•ң м „лӢ¬лҸҷл Ҙ 비көҗлҠ” Table 7м—җ лӮҳнғҖлӮҙм—ҲлӢӨ.
2.2.2 лҹ¬лҚ” лІҢлёҢмқҳ нҳ•мғҒм—җ л”°лҘё м„Өкі„ (Case 2)
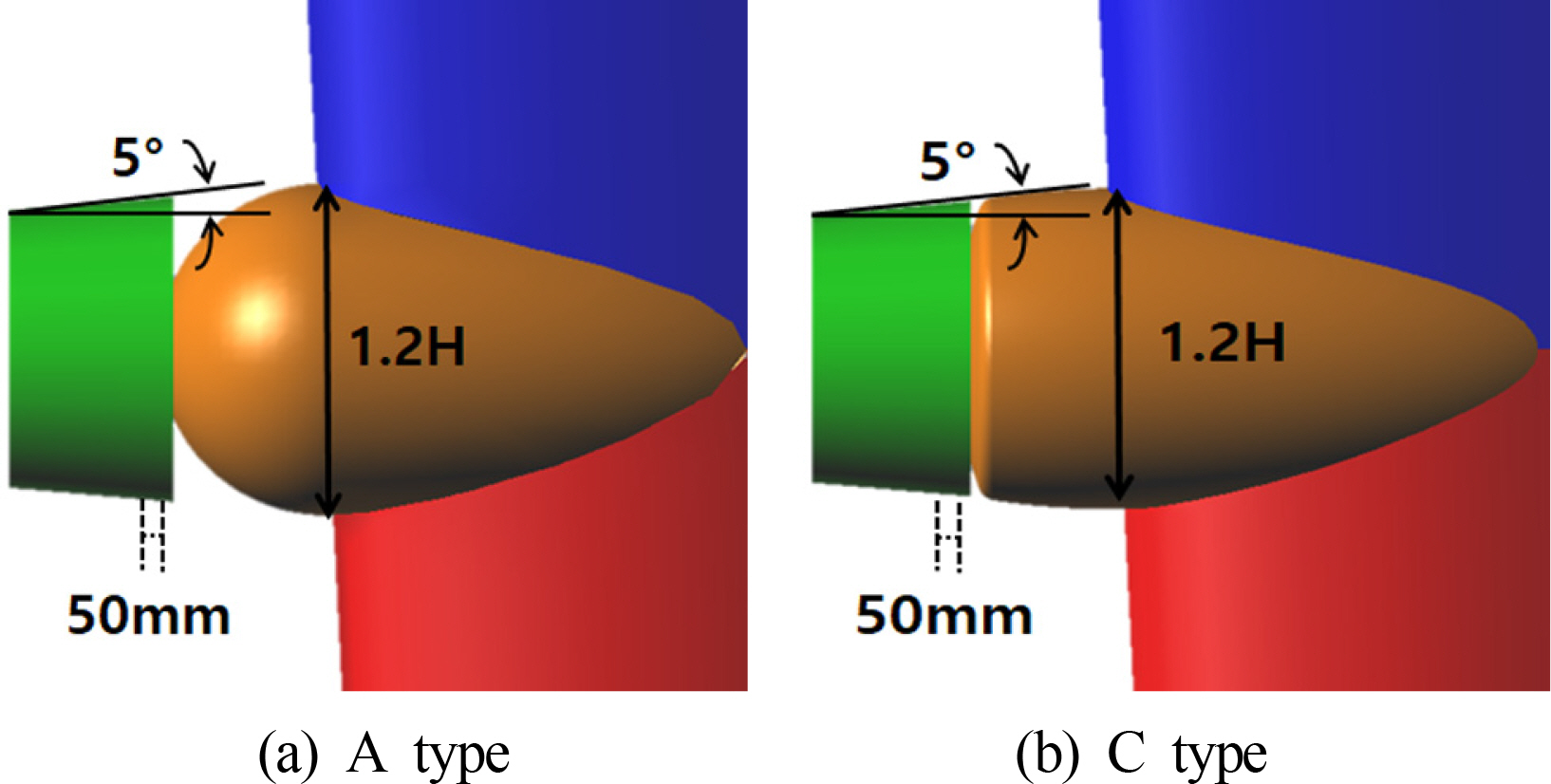
лҹ¬лҚ” лІҢлёҢмқҳ нҳ•мғҒмқ„ кө¬нҳ• Typeкіј л°ңмӮ°нҳ• мәЎкіј мң м„ нҳ•мқ„ мқҙлЈЁлҸ„лЎқ м„Өкі„н•ң нҸүн–үн•ң Type 2к°Җм§ҖлЎң лӮҳлҲ„м–ҙ м „лӢ¬лҸҷл Ҙмқ„ 비көҗн•ҳмҳҖлӢӨ. лҸҷмқјн•ң 비көҗлҘј мң„н•ҙ лҹ¬лҚ” лІҢлёҢмқҳ нҒ¬кё° л°Ҹ мәЎ к°ҒлҸ„лҠ” мқјм •н•ҳкІҢ л‘җм—Ҳмңјл©°, лӘЁлҚёл§ҒмқҖ Fig. 5мҷҖ к°ҷлӢӨ. лІҢлёҢ нҳ•мғҒм—җ л”°лҘё м„ұлҠҘ 비көҗ кІ°кіј кө¬нҳ• лІҢлёҢк°Җ нҸүн–үн•ң лІҢлёҢліҙлӢӨ м•Ҫ 0.8% мҡ°мҲҳн•ң м „лӢ¬ лҸҷл Ҙ к°җмҶҢлҘј ліҙмҳҖмңјл©°, мқҙлҘј Case 3-4мқҳ кі м •ліҖмҲҳлЎң л‘җм—ҲлӢӨ.
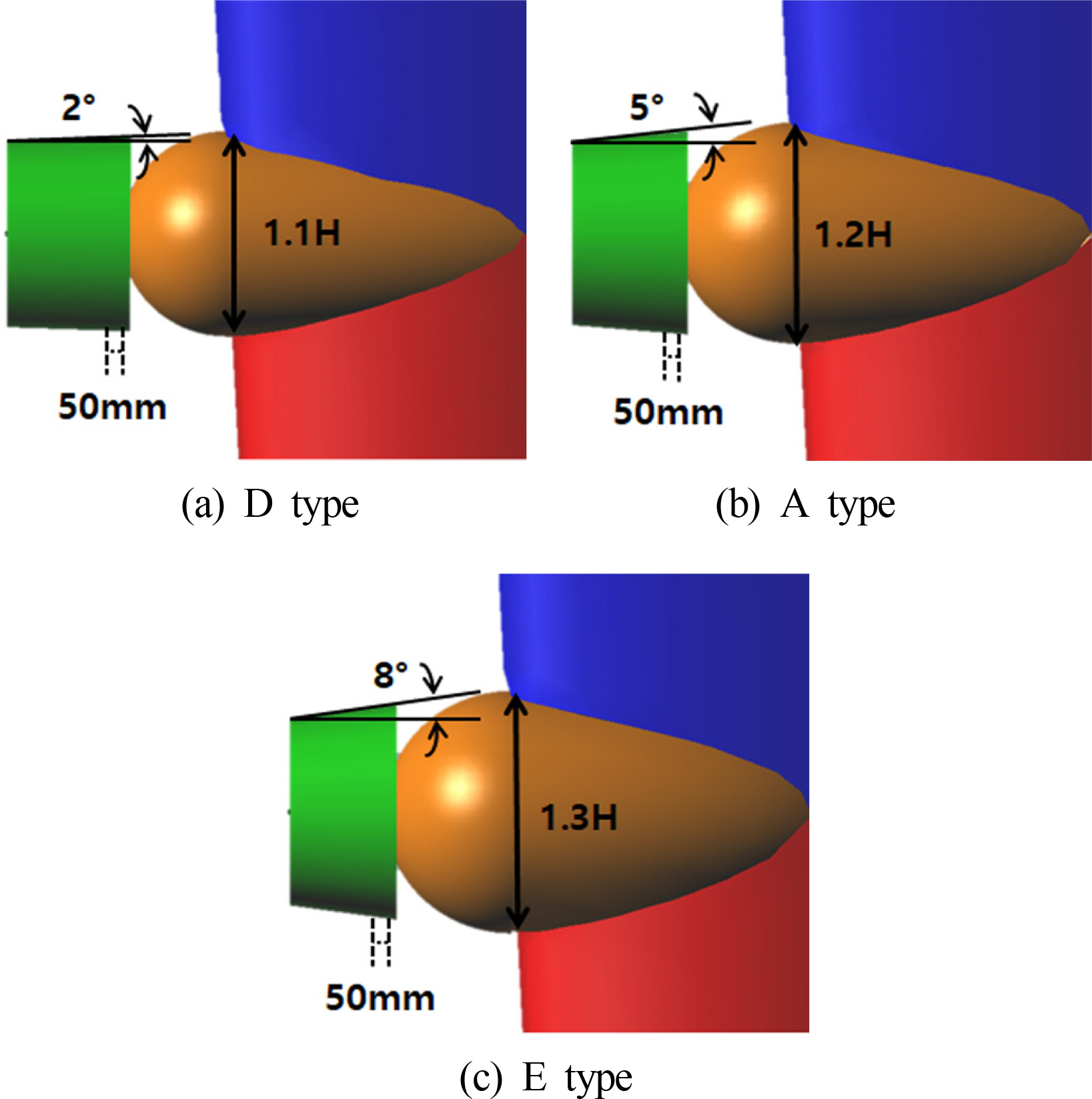
2.2.3 лҹ¬лҚ” лІҢлёҢ нҒ¬кё°мҷҖ к°ҒлҸ„м—җ л”°лҘё м„Өкі„ (Case 3)
лҹ¬лҚ” лІҢлёҢмқҳ нҒ¬кё° л°Ҹ мәЎмқҳ к°ҒлҸ„лҠ” лІҢлёҢмқҳ мөңлҢҖ м§ҒкІҪкіј мәЎмқҳ м—°мһҘм„ мқҙ л§ҢлӮҳлҸ„лЎқ н•ҳлӮҳмқҳ ліҖмҲҳлЎң м„Өкі„н•ҳмҳҖлӢӨ. лІҢлёҢмқҳ нҒ¬кё°лҠ” 1.1Hл¶Җн„° нӮӨмӣҢк°Җл©° мөңм Ғ м§ҒкІҪмқ„ м°ҫм•„ліҙм•ҳлӢӨ. лҹ¬лҚ” лІҢлёҢмҷҖ мәЎ мӮ¬мқҙ к°„к·№мқҖ 50mm, лІҢлёҢ TypeмқҖ кө¬нҳ• лІҢлёҢлЎң лҸҷмқјн•ҳкІҢ м„Өкі„н•ҳмҳҖмңјл©°, лӘЁлҚёл§ҒмқҖ Fig. 6мҷҖ к°ҷлӢӨ. лІҢлёҢ нҒ¬кё°м—җ л”°лҘё м„ұлҠҘ 비көҗ кІ°кіј, лІҢлёҢмқҳ нҒ¬кё°к°Җ 1.1Hмқј л•Ң ліҙлӢӨ 1.2Hмқј кІҪмҡ° м•Ҫ 0.5%, 1.3Hмқј кІҪмҡ° м•Ҫ 0.3% мҡ°мҲҳн•ң м „лӢ¬лҸҷл Ҙ к°җмҶҢлҘј ліҙмҳҖмңјл©° мөңм Ғ м§ҒкІҪмқҖ 1.2Hмһ„мқ„ м•Ң мҲҳ мһҲм—ҲлӢӨ. л”°лқјм„ң мқҙлҘј Case 4мқҳ кі м •ліҖмҲҳ(D=1.2H)лЎң л‘җм—ҲлӢӨ.
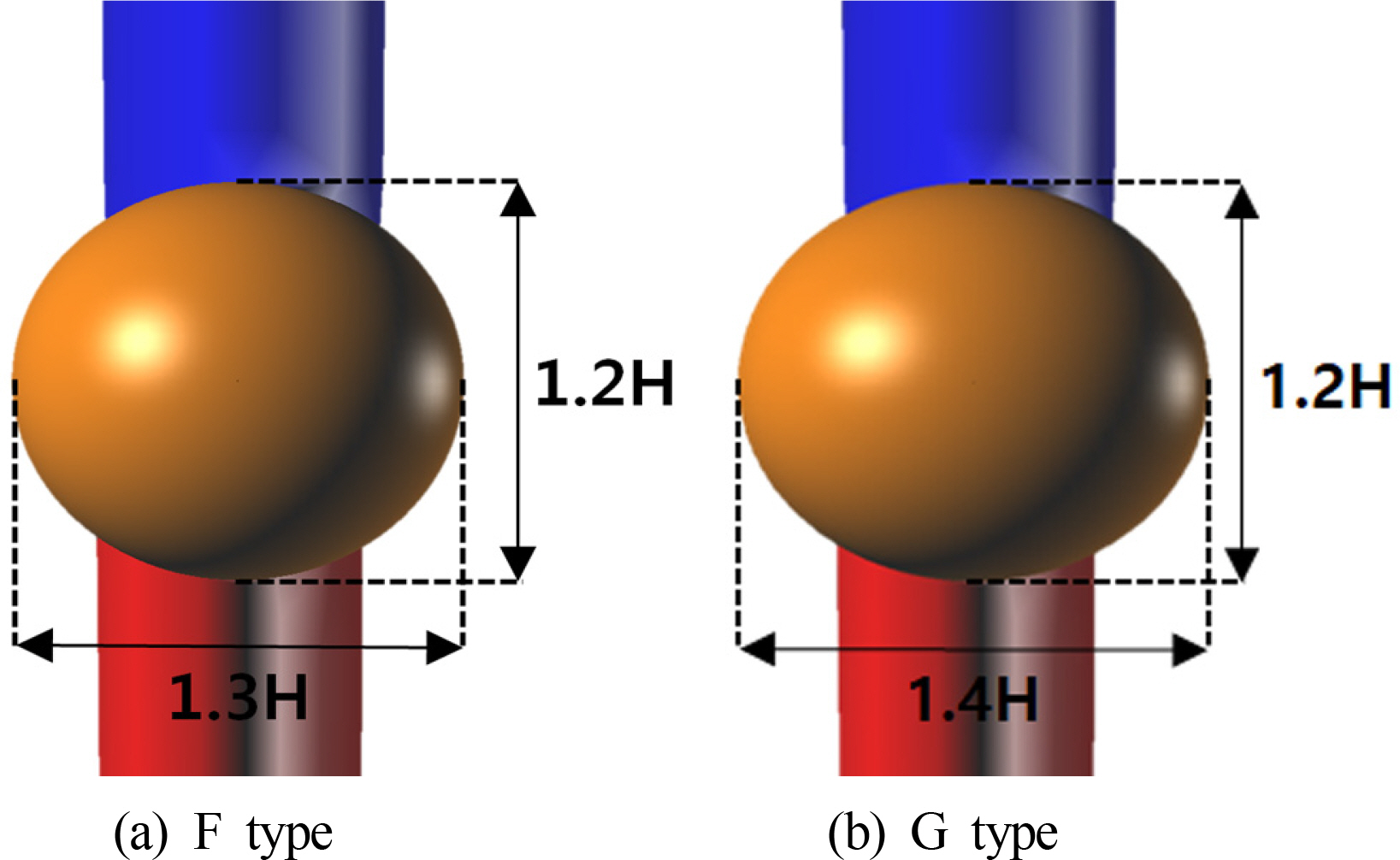
2.2.4 비лҢҖм№ӯ лҹ¬лҚ” лІҢлёҢ нҳ•мғҒм—җ л”°лҘё м„Өкі„ (Case 4)
비лҢҖм№ӯ лҹ¬лҚ” лІҢлёҢлҠ” лІҢлёҢмқҳ к°ҖлЎңл°©н–Ҙ м§ҒкІҪ(W)мқҙ м„ёлЎңл°©н–Ҙ м§ҒкІҪ(D)м—җ 비н•ҙ лҚ” нҒ° лІҢлёҢлЎң, лІҢлёҢмқҳ к°ҖлЎңл°©н–Ҙ кёёмқҙк°Җ н”„лЎңнҺ лҹ¬лЎңл¶Җн„° лӮҳмҳЁ нҡҢм „н•ҳлҠ” нқҗлҰ„мқ„ м–өм ңн•ҳм—¬ кі§кІҢ нҺҙмӨ„ кІғмқҙлқј кё°лҢҖн•ҳм—¬ м„ұлҠҘ м—°кө¬лҘј н•ҙ ліҙм•ҳлӢӨ. лҹ¬лҚ” лІҢлёҢмҷҖ мәЎ мӮ¬мқҙ к°„к·№мқҖ 50mm, лІҢлёҢ TypeмқҖ кө¬нҳ• лІҢлёҢ, D=1.2HлЎң лҸҷмқјн•ҳкІҢ м„Өкі„н•ҳмҳҖлӢӨ. лҳҗн•ң мқҙл•Ң мәЎ к°ҒлҸ„(Оё)лҠ” м„ёлЎңл°©н–Ҙ м§ҒкІҪ(D)м—җ л§һ추м–ҙ м •н•ҳмҳҖмңјл©°, лӘЁлҚёл§ҒмқҖ Fig. 7кіј к°ҷлӢӨ. 비лҢҖм№ӯ лІҢлёҢ нҳ•мғҒм—җ л”°лҘё м„ұлҠҘ비көҗ кІ°кіј, лІҢлёҢмқҳ нҒ¬кё°к°Җ 1.2H/1.3Hмқј л•Ң ліҙлӢӨ 1.2H/1.4Hмқј кІҪмҡ° м•Ҫ 0.4% мҡ°мҲҳн•ң м „лӢ¬лҸҷл Ҙ к°җмҶҢлҘј ліҙм—¬ мөңмў…м ҒмңјлЎң Bare hullлҢҖ비 м•Ҫ 2.05%мқҳ м „лӢ¬лҸҷл Ҙ к°җмҶҢлҘј ліҙмҳҖлӢӨ.
3. мҲҳм№ҳн•ҙм„қ
м•һм„ң м„Өкі„н•ң Post-deviceлҘј STAR-CCM+(v11.02)лҘј мқҙмҡ©н•ҳм—¬ мһҗн•ӯм„ұлҠҘмқ„ 비көҗн•ҳмҳҖлӢӨ. м„ұлҠҘ 비көҗлҠ” мһҗн•ӯм җм—җм„ң м•ҢлӘём„ мІҙ(Bare hull) лҢҖ비 ESD л¶Җм°© мӢң м„ л°•мқҳ м „лӢ¬лҸҷл Ҙ(2ПҖnmQm) к°җмҶҢлЎң нҸүк°Җн•ҳмҳҖлӢӨ.
3.1 лҢҖмғҒм„ м ңмӣҗ
лҢҖмғҒм„ (3,600TEU KRISO container ship)мқҖ л¶ҖмӮ°лҢҖн•ҷкөҗ мҳҲмқёмҲҳмЎ°мқҳ нҒ¬кё°м—җ л§һ추м–ҙ н”„лЎңнҺ лҹ¬мқҳ м§ҒкІҪмқҙ 0.2mк°Җ лҗҳлҠ” 축мІҷ비 39.5лЎң м„Өкі„н•ҳмҳҖмңјл©°, м„Өкі„мҶҚлҸ„лҠ” 1.964m/sмқҙлӢӨ.
3.2 м§Җл°°л°©м •мӢқ
비압축м„ұ лӮңлҘҳмң лҸҷмқҳ м§Җл°°л°©м •мӢқмқҖ м—°мҶҚл°©м •мӢқ(мӢқ (1))кіј Reynoldsaveraged Navier-Stokes(RANS) л°©м •мӢқ(мӢқ (2))мқҙл©°, лӢӨмқҢкіј к°ҷмқҙ н‘ңнҳ„лҗңлӢӨ.
м—¬кё°м„ң Ui=(u,v,w)лҠ” xi=(x,y,z)л°©н–Ҙмқҳ мң мҶҚмқҙл©°, pлҠ” м •м••, ПҒлҠ” мң мІҙл°ҖлҸ„, ОјлҠ” мң мІҙм җм„ұ, - ПҒ u i u l
3.3 мҲҳм№ҳн•ҙм„қ кё°лІ•
ліё м—°кө¬мқҳ н•ҙм„қ н”„лЎңк·ёлһЁмқҖ мғҒмҡ©мҪ”л“ңмқё Star CCM+ Ver. 11.02лҘј мӮ¬мҡ©н•ҳмҳҖкі , лӮңлҘҳ лӘЁлҚёмқҖ кІҪкі„мёө лӮҙм—җм„ңмқҳ л°•лҰ¬мң лҸҷмқ„ лӘЁмӮ¬н•ҳлҠ”лҚ° л„җлҰ¬ мӮ¬мҡ©лҗҳлҠ” Realizable k-Оө лӘЁлҚёмқ„ мұ„нғқн•ҳмҳҖлӢӨ. н”„лЎңнҺ лҹ¬ мЈјмң„ мң лҸҷмқҳ лӘЁмӮ¬лҠ” н”„лЎңнҺ лҹ¬мҷҖ нҡҢм „ мҳҒм—ӯмқҳ кІ©мһҗлҘј м§Ғм ‘ нҡҢм „мӢңмјңмЈјлҠ” Sliding mesh кё°лІ•мқ„ мӮ¬мҡ©н•ҳмҳҖмңјл©°, Time stepмқҖ н”„лЎңнҺ лҹ¬к°Җ н•ңлІҲ нҡҢм „н• л•Ң м•Ҫ 95нҡҢ, 48нҡҢмқё кІҪмҡ°лЎң лӮҳлҲ„м–ҙ м„ұлҠҘмқ„ 비көҗн•ҳмҳҖлӢӨ. кІ°кіјм ҒмңјлЎң м Җн•ӯ л°Ҹ 추л Ҙ, нҶ нҒ¬мқҳ м°Ёмқҙк°Җ 1% лҜёл§ҢмңјлЎң ліҙм—¬ кі„мӮ° мӢңк°„ лҢҖ비 мўҖ лҚ” нҡЁмңЁм Ғмқё 0.002мҙҲмқҳ Time stepмқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ. Time stepм—җ л”°лҘё м„ұлҠҘ 비көҗлҠ” Table 3м—җ лӮҳнғҖлӮҙм—Ҳмңјл©°, мһҗм„ён•ң н•ҙм„қмЎ°кұҙмқҖ Table 4мҷҖ к°ҷлӢӨ.
3.4 кІ©мһҗкі„ кө¬м„ұ
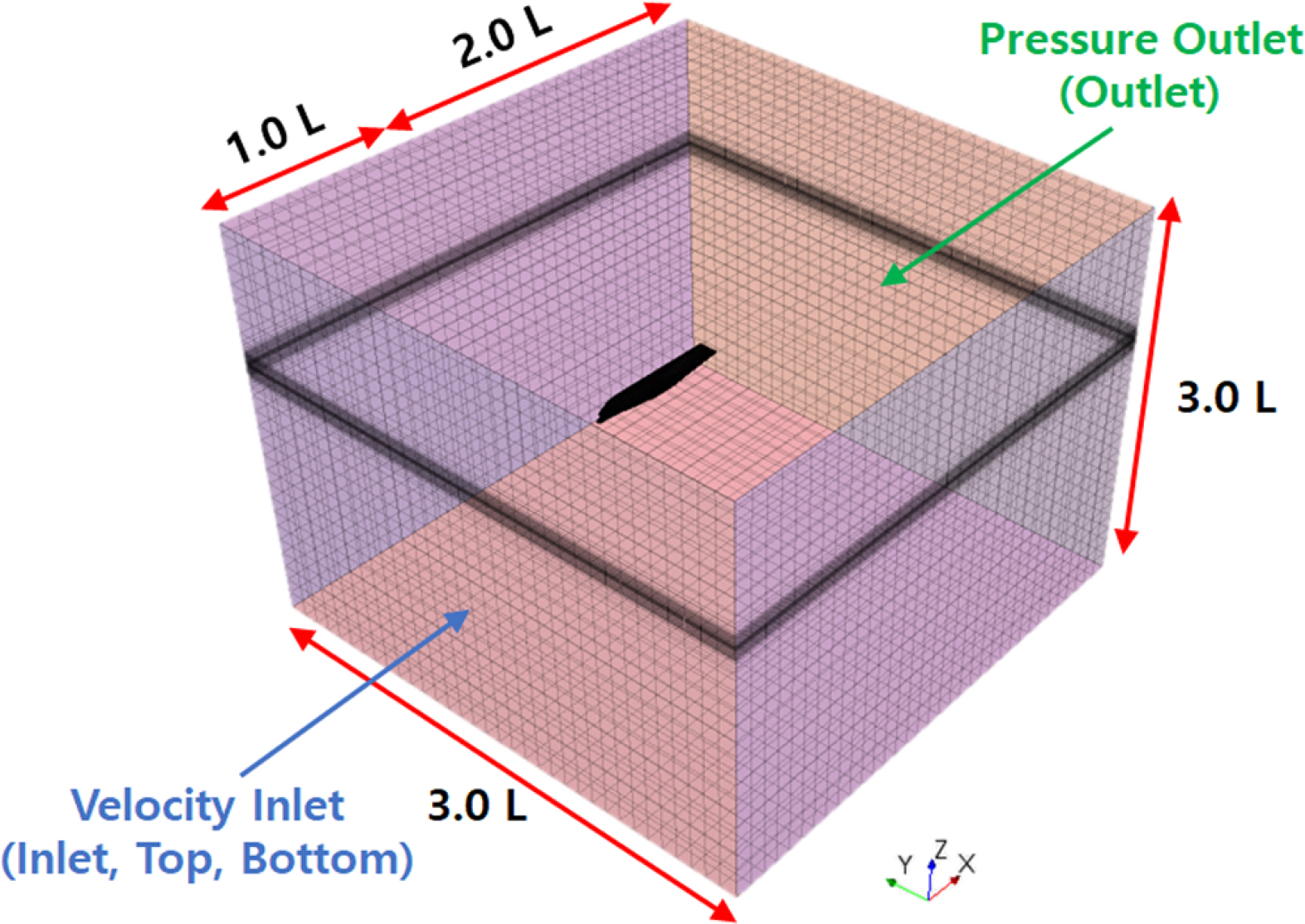
ліё м—°кө¬м—җм„ңлҠ” м„ мІҙн‘ңл©ҙм—җ Trimmer meshлҘј мЈјм—Ҳмңјл©°, мўҖ лҚ” нҳ•мғҒмқҙ ліөмһЎн•ң н”„лЎңнҺ лҹ¬м—җлҠ” Polyhedral meshлҘј мӮ¬мҡ©н•ҳм—¬ н”„лЎңнҺ лҹ¬ мЈјмң„ мң лҸҷмқ„ мһҳ н‘ңнҳ„н• мҲҳ мһҲлҸ„лЎқ н•ҙмЈјм—ҲлӢӨ. н‘ңл©ҙмқҳ мҙҲкё° кІ©мһҗ лҶ’мқҙлҘј лӮҳнғҖлӮҙлҠ” y+=70мңјлЎң л‘җм—Ҳмңјл©°, м„ мІҙмқҳ м „лӢЁл Ҙмқҙ мһҳ н‘ңнҳ„лҗ мҲҳ мһҲлҸ„лЎқ Prism layer(кІҪкі„мёөкІ©мһҗ)лҘј 6к°ңлЎң лӮҳлҲ„м–ҙ лІҪн•ЁмҲҳ(Wall function)лҘј м Ғмҡ©н•ҳмҳҖлӢӨ. н•ҙм„қмқ„ мң„н•ң лҸ„л©”мқёмқҳ кІҪкі„мЎ°кұҙмқҖ Inlet, Top, Bottomл¶Җ분м—җ Velocity InletмЎ°кұҙмқ„ мЈјм—Ҳмңјл©°, Outlet л¶Җ분м—җ Pressure OutletмЎ°кұҙмқ„, к·ёлҰ¬кі м–‘ Sideл¶Җ분м—җ SymmetryмЎ°кұҙмқ„ мЈјм—ҲлӢӨ. мң„мҷҖ к°ҷмқҖ кІ©мһҗкі„лҘј Fig. 8м—җ лӮҳнғҖлғҲмңјл©°, кІҪкі„мЎ°кұҙмқ„ Fig. 9м—җ лӮҳнғҖлӮҙм—ҲлӢӨ.
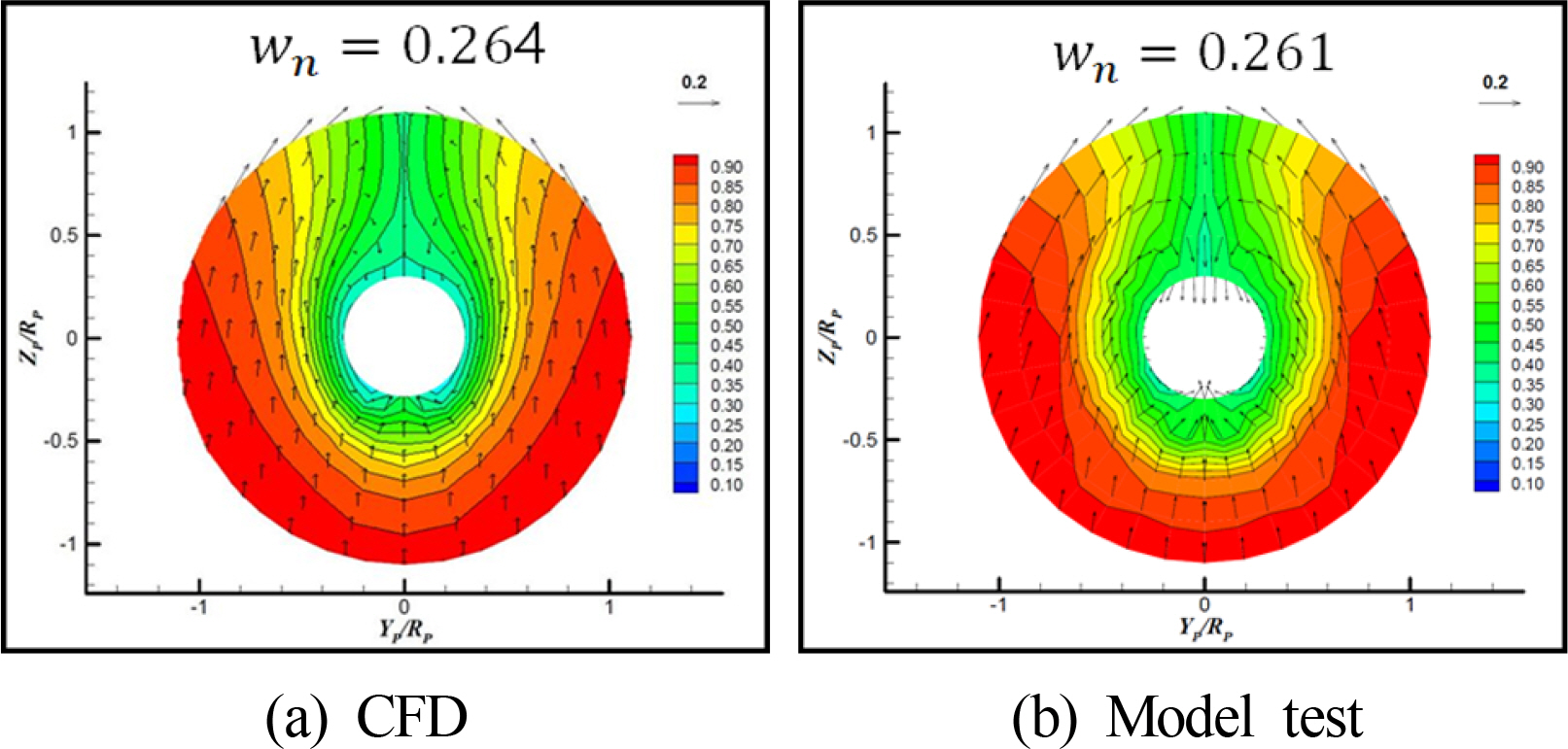
3.5 мҲҳм№ҳн•ҙм„қ кІҖмҰқ
CFDлҘј нҶөн•ҙ н•ҙм„қн•ң лӘЁлҚёмқҖ лӮңлҘҳ лӘЁлҚё, кІҪкі„мёө л‘җк»ҳ, Time stepл“ұ лӢӨм–‘н•ң н•ҙм„қ мЎ°кұҙм—җ л”°лқј кІ°кіјк°Җ лӢӨлҘҙлӢӨ. л”°лқјм„ң CFD н•ҙм„қмқҳ кІ°кіјк°’мқҖ кІҖмҰқмқ„ нҶөн•ҙ мӢ лў°м„ұмқ„ нҷ•ліҙн•ҙм•јн•ңлӢӨ. ліё м—°кө¬м—җм„ңлҠ” м„ н–үм—°кө¬(Tae, 2017; Kwon, 2013)м—җм„ң 진н–үлҗң KCSм„ л°•мқҳ Model testлҘј нҶөн•ҙ CFDмқҳ м Җн•ӯ л°Ҹ кіөм№ӯл°ҳлҘҳлҘј 비көҗн•ҳмҳҖлӢӨ(Table 5, Fig. 10).
4. мҲҳм№ҳн•ҙм„қ кІ°кіј
4.1 м Җн•ӯм„ұлҠҘ кІ°кіј
мһҗн•ӯмғҒнғңмҷҖ лҸҷмқјн•ң н•ҙм„қ мЎ°кұҙмқ„ мӮ¬мҡ©н•ҳм—¬ кІ©мһҗкі„мқҳ мқјкҙҖм„ұмқ„ мң м§Җн•ҳмҳҖмңјл©°, лҹ¬лҚ” лІҢлёҢ л°Ҹ мәЎмқ„ нҸ¬н•Ён•ң м Җн•ӯ к°’мқ„ нҷ•мқён•ҳкё° мң„н•ҙ н”„лЎңнҺ лҹ¬ лё”л Ҳмқҙл“ңлҘј м ңкұ°н•ң Dummy hubлҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. Caseм—җ л”°лҘё мһҗм„ён•ң м Җн•ӯм„ұлҠҘ кІ°кіјлҠ” Table 6кіј к°ҷлӢӨ.
м„Өкі„ мҶҚлҸ„мқё 24л…ёнҠё(44.448km/h)м—җм„ң кІ°кіјлҘј 비көҗн•ҳмҳҖмңјл©°, к°Ғ Caseлі„лЎң м Җн•ӯ к°’мқҳ м°ЁмқҙлҠ” 1% лҜёл§Ңмқҳ мһ‘мқҖ м°ЁмқҙлҘј ліҙмҳҖм§Җл§Ң, нҠ№мқҙн•ң м җмқҖ лҹ¬лҚ” лІҢлёҢмқҳ нҒ¬кё°к°Җ м»Өм§ҲмҲҳлЎқ м Җн•ӯмқҙ м»Өм§ҖлҠ” кІғмқҙ м•„лӢҢ мқјм •н•ң нҒ¬кё°м—җм„ң м Җн•ӯмқҙ к°ҖмһҘ мһ‘м•„м§ҖлҠ” мөңм Ғ нҒ¬кё°к°Җ мЎҙмһ¬н•ңлӢӨлҠ” кІғмқҙм—ҲлӢӨ. мқҙлҘј нҶөн•ҙ лҹ¬лҚ” лІҢлёҢмқҳ м—°кө¬лҠ” ліё м—°кө¬мҷҖ к°ҷмқҖ Case studyлҘј нҶөн•ҙ мөңм Ғ м§ҒкІҪмқ„ лҸ„м¶ңн•ҙм•ј н•ңлӢӨкі нҢҗлӢЁн•ҳмҳҖлӢӨ.
4.2 мһҗн•ӯм„ұлҠҘ кІ°кіј
мһҗн•ӯм җ(Self-propulsion point)м—җм„ңмқҳ лӘЁнҳ•мқҳ м „ м Җн•ӯ R T M S P
4.2.1 лҹ¬лҚ” лІҢлёҢмҷҖ мәЎ мӮ¬мқҙ к°„к·№м—җ л”°лҘё мҲҳм№ҳн•ҙм„қ кІ°кіј (Case 1)
лҹ¬лҚ” лІҢлёҢмҷҖ мәЎ мӮ¬мқҙ к°„к·№мқҙ 50mmмқј л•Ң лӮҙл¶Җм—җм„ң л°ңмғқн•ҳлҠ” мҷҖлҘҳк°Җ к°җмҶҢн•ҳм—¬ м Җн•ӯмқҙ к°җмҶҢн•ҳлҠ” кІғмқ„ Table 6мқҳ EHP(Effective horse power)мҷҖ Fig. 11мқ„ нҶөн•ҙ нҷ•мқён•ҳмҳҖкі , мқҙлЎң мқён•ҙ к°„к·№м—җ л”°лҘё мӨҖ추진нҡЁмңЁмқҳ м°ЁмқҙлҠ” нҒ¬м§Җ м•Ҡм§Җл§Ң DHP(Delivered horse power)мқҳ м •лҹүм Ғмқё к°’мқҙ к°җмҶҢн•ҳлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ(Table 7).
4.2.2 лҹ¬лҚ” лІҢлёҢмқҳ нҳ•мғҒм—җ л”°лҘё мҲҳм№ҳн•ҙм„қ кІ°кіј (Case 2)
лҹ¬лҚ” лІҢлёҢмқҳ нҳ•мғҒмқҙ нҸүн–үн•ң нҳ•мғҒмқј л•Ң н”„лЎңнҺ лҹ¬м—җм„ң лӮҳмҳЁ нҡҢм „н•ҳлҠ” нқҗлҰ„мқҙ лІҢлёҢмқҳ л°©н•ҙлҘј л°ӣм§Җ м•Ҡкі к·ёлҢҖлЎң нқҳлҹ¬ лІҢлёҢлҘј м§ҖлӮң нӣ„ м•„лһҳ л°©н–ҘмңјлЎң лӮҳм•„к°ҖлҠ” кІғмқ„ ліј мҲҳ мһҲм§Җл§Ң, кө¬нҳ• лІҢлёҢмқҳ кІҪмҡ° лІҢлёҢмқҳ нҳ•мғҒм—җ мқҳн•ҙ нқҗлҰ„мқҳ нҡҢм „мқҙ м ңн•ңлҗҳл©ҙм„ң лІҢлёҢлҘј м§ҖлӮң нӣ„ кі§кІҢ л»—м–ҙлӮҳк°ҖлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ(Fig. 12).
мқҙлҘј мһҗн•ӯмҡ”мҶҢлҘј нҶөн•ҙ 비көҗн•ҳл©ҙ, нқҗлҰ„мқҙ кө¬нҳ• лІҢлёҢм—җ м ңн•ңлҗҳм–ҙ л°ҳлҘҳк°Җ мҰқк°Җн•ҳм§Җл§Ң к·ёмҷҖ лҸҷмӢңм—җ 추л Ҙк°җмҶҢкі„мҲҳлҸ„ мҰқк°Җн•ҳм—¬ л‘җ лІҢлёҢмқҳ м„ к°ҒнҡЁмңЁмқҖ нҒ° м°ЁмқҙлҘј ліҙмқҙм§Җ м•ҠлҠ”лӢӨ. н—ҲлӮҳ кө¬нҳ• лІҢлёҢлҘј нҶөн•ҙ нҡҢм „м—җл„Ҳм§ҖлҘј нҡҢмҲҳн•ЁмңјлЎңмҚЁ лҸҷмқјн•ң 추л Ҙмқ„ лӮҙлҠ”лҚ° мҡ”кө¬лҗҳлҠ” нҡҢм „мҲҳ л°Ҹ нҶ нҒ¬к°Җ мӨ„м–ҙл“ӨкІҢ лҗҳкі м¶”л Ҙмқјм№ҳлІ•мқ„ мӮ¬мҡ©н•ҳмҳҖмқ„ л•Ң мғҒлҢҖнҡҢм „нҡЁмңЁмқҙ лҚ” лҶ’м•„м§ҖлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ. к·ём—җ л”°лқј мӨҖ추진нҡЁмңЁмқҙ мҰқк°Җн•ҳкІҢ лҗҳкі DHPк°Җ к°җмҶҢн•ҳлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ(Table 7).
4.2.3 лҹ¬лҚ” лІҢлёҢ нҒ¬кё°мҷҖ к°ҒлҸ„м—җ л”°лҘё мҲҳм№ҳн•ҙм„қ кІ°кіј (Case 3)
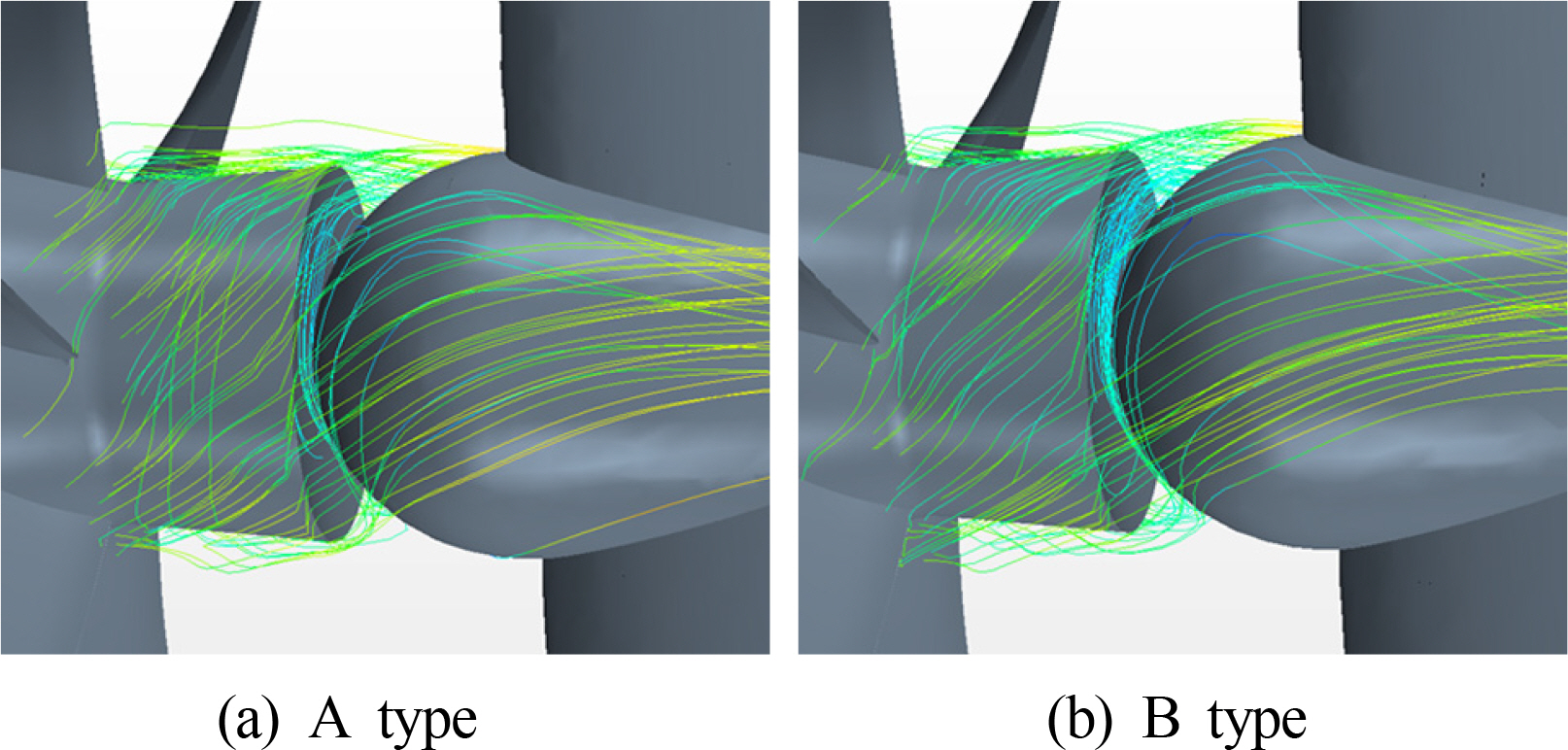
Fig. 13мқ„ нҶөн•ҙ лҹ¬лҚ” лІҢлёҢ н‘ңл©ҙмқ„ нғҖкі нқҗлҘҙлҠ” мң м„ (м җм„ нҷ”мӮҙн‘ң)мқ„ 비көҗн•ҙ ліҙм•ҳмқ„ л•Ң D type л°Ҹ E typeмқҖ н”„лЎңнҺ лҹ¬м—җм„ң лӮҳмҳЁ нҡҢм „лҗң нқҗлҰ„мқҙ лІҢлёҢ мғҒл¶Җм—җм„ң нңҳм–ҙм ё лІҢлёҢлҘј м§ҖлӮң нӣ„ мҳӨнһҲл Ө м•„лһҳ л°©н–ҘмңјлЎң лӮҳм•„к°ҖлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ. н—ҲлӮҳ A typeмқҳ кІҪмҡ° нҡҢм „лҗң нқҗлҰ„мқҙ лІҢлёҢм—җ мқҳн•ҙ м Ғм ҲнһҲ м–өм ңлҗҳм–ҙ лІҢлёҢлҘј м§ҖлӮң нӣ„ кі§кІҢ л»—м–ҙлӮҳк°ҖлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ. мқҙлҹ¬н•ң мӣҗмқёмңјлЎң Table 6кіј к°ҷмқҙ A typeмқҳ EHPк°Җ к°ҖмһҘ м ҒмқҖ кІғмңјлЎң мӮ¬лЈҢлҗңлӢӨ. Table 7мқҳ мһҗн•ӯмҡ”мҶҢлҘј 비көҗн•ҙ ліҙл©ҙ, лҹ¬лҚ” лІҢлёҢмқҳ нҒ¬кё°к°Җ м»Өм§ҲмҲҳлЎқ л°ҳлҘҳ비к°Җ м»Өм§Җл©° к·ём—җ л”°лқј лІҢлёҢмқҳ нҒ¬кё°к°Җ к°ҖмһҘ нҒ° E typeм—җм„ң м„ к°ҒнҡЁмңЁ л°Ҹ мӨҖ추진 нҡЁмңЁмқҙ к°ҖмһҘ нҒ° кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ. к·ёлҹ¬лӮҳ A typeмқҳ лІҢлёҢк°Җ к°ҖмһҘ м ҒмқҖ EHP к°’мқ„ к°Җм§Җкё° л•Ңл¬ём—җ DHP лҳҗн•ң E typeліҙлӢӨ м ҒмқҖ к°’мқ„ к°–кІҢ лҗҳм–ҙ Bare hullлҢҖ비 к°ҖмһҘ мҡ°мҲҳн•ң DHPк°җмҶҢлҘј ліҙмҳҖлӢӨ.
4.2.4 비лҢҖм№ӯ лҹ¬лҚ” лІҢлёҢмқҳ нҳ•мғҒм—җ л”°лҘё мҲҳм№ҳн•ҙм„қ кІ°кіј (Case 4)
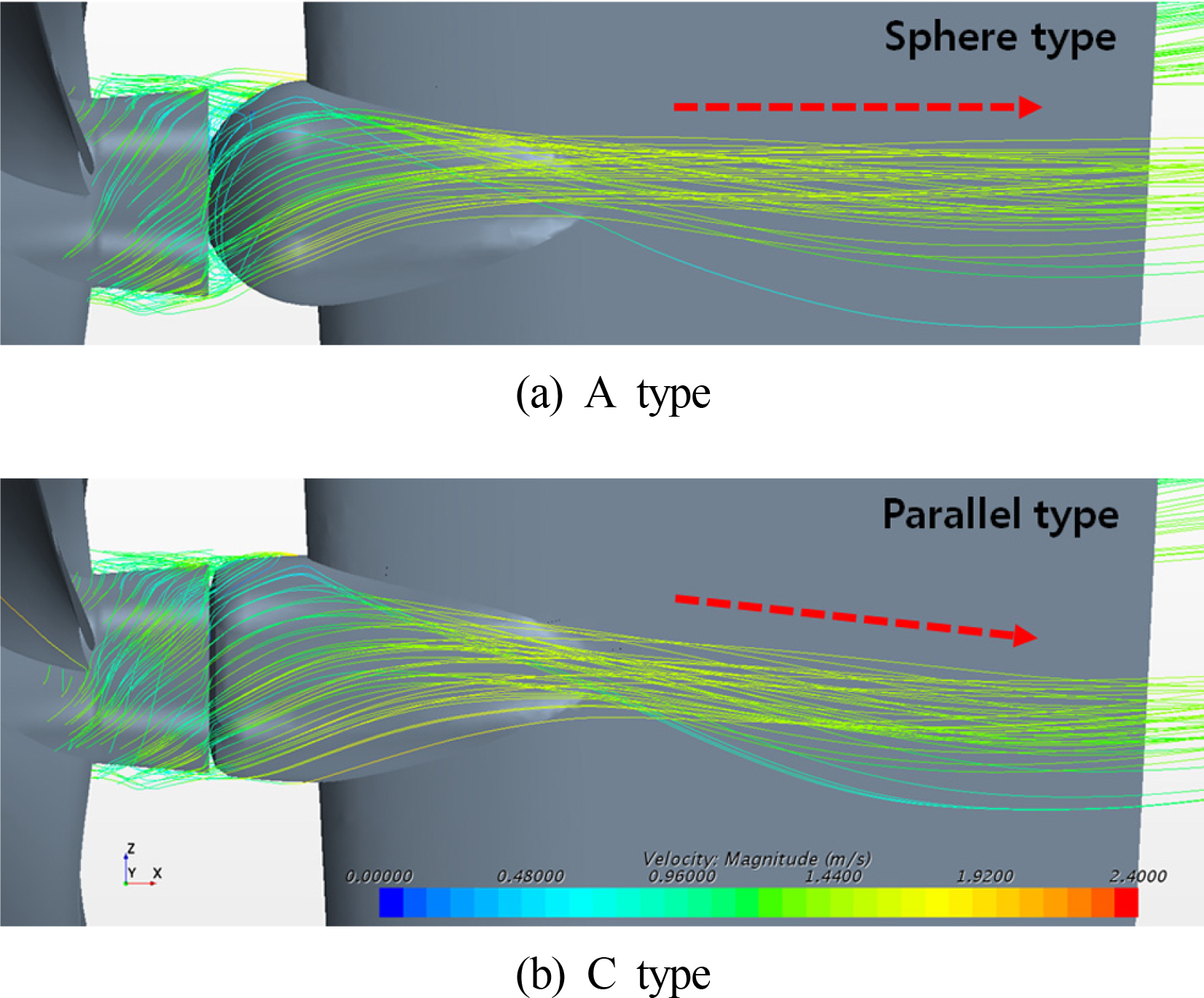
Fig. 14лҘј нҶөн•ҙ лҹ¬лҚ” лІҢлёҢ н‘ңл©ҙмқ„ нғҖкі нқҗлҘҙлҠ” мң м„ мқ„ 비көҗн•ҙ ліҙм•ҳмқ„ л•Ң D type л°Ҹ E typeмқҳ лІҢлёҢліҙлӢӨ нқҗлҰ„мқҙ кіјлҸ„н•ҳкІҢ нңҳм–ҙм§Җм§Җ м•Ҡкі лІҢлёҢ м „мІҙм—җ кұёміҗ кі лҘҙкІҢ 분нҸ¬лҗҳм–ҙ мһҲлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ. мқҙлҹ¬н•ң мӣҗмқёмңјлЎң Table 6мҷҖ к°ҷмқҙ F type л°Ҹ G typeмқҳ EHPк°Җ лІҢлёҢ нҒ¬кё°м—җ 비н•ҙ 비көҗм Ғ м ҒмқҖ к°’мқ„ к°Җм§ҖлҠ” кІғмңјлЎң мӮ¬лЈҢлҗңлӢӨ. Table 7мқҳ мһҗн•ӯмҡ”мҶҢлҘј 비көҗн•ҙ ліҙл©ҙ, лІҢлёҢмқҳ к°ҖлЎңл°©н–Ҙ кёёмқҙк°Җ кёём–ҙм§Җм§Җл§Ң мәЎмқҳ к°ҒлҸ„лҠ” 5В°лЎң кі м •н•ҙ л‘җм—Ҳкё° л•Ңл¬ём—җ мҳӨнһҲл Ө E typeліҙлӢӨ нҒ° л°ҳлҘҳ비лҘј к°Җ진лӢӨ. к·ём—җ л”°лқј м„ к°ҒнҡЁмңЁ л°Ҹ мӨҖ추진 нҡЁмңЁмқҙ мҰқк°Җн•ҳл©° мөңмў…м ҒмңјлЎң G type ESDм—җм„ң Bare hull DHP лҢҖ비 2.05%к°җмҶҢлҘј ліҙм—¬ м Җн•ӯ л°Ҹ мһҗн•ӯ мёЎл©ҙм—җм„ң к°ҖмһҘ мөңм Ғнҷ”лҗң ESDлҘј м„Өкі„н• мҲҳ мһҲм—ҲлӢӨ.
5. кІ° лЎ
ліё л…јл¬ём—җм„ңлҠ” KCSм—җ мөңм Ғнҷ”лҗң Post-deviceлҘј м„Өкі„н•ҳм—¬ м„Өкі„ мҶҚлҸ„мқё 24л…ёнҠё(44.448km/h)м—җм„ң CFDлҘј нҶөн•ҙ м Җн•ӯ л°Ҹ мһҗн•ӯм„ұлҠҘмқ„ 비көҗн•ҳмҳҖлӢӨ. Post-deviceмқҳ мөңм Ғнҷ”лҘј мң„н•ҙ лҹ¬лҚ” лІҢлёҢ л°Ҹ н”„лЎңнҺ лҹ¬ мәЎмқ„ м„Өкі„ліҖмҲҳлЎң л‘җкі 4к°Җм§Җ Case studyлҘј нҶөн•ҙ м„ұлҠҘмқ„ 비көҗн•ҳмҳҖлӢӨ. Case 1м—җм„ңлҠ” лҹ¬лҚ” лІҢлёҢмҷҖ мәЎмқҳ к°„к·№м—җ л”°лҘё м„ұлҠҘмқ„ нҷ•мқён•ҙ ліҙм•ҳкі , Case 2м—җм„ңлҠ” ліё м—°кө¬мқҳ лҢҖмғҒм„ м—җ м Ғн•©н•ң лІҢлёҢ нҳ•мғҒмқ„ нҷ•мқён•ҙ ліҙм•ҳлӢӨ. Case 3м—җм„ңлҠ” лІҢлёҢмқҳ м§ҒкІҪмқ„ 1.1Hл¶Җн„° нӮӨмӣҢк°Җл©ҙм„ң мөңм Ғ м§ҒкІҪмқ„ м°ҫм•„ліҙм•ҳмңјл©°, Case 4м—җм„ңлҠ” нҡҢм „н•ҳлҠ” нӣ„лҘҳлҘј м–өм ңн•ҳм—¬ кі§кІҢ л»—м–ҙмЈјлҸ„лЎқ лІҢлёҢмқҳ к°ҖлЎңл°©н–Ҙ кёёмқҙлҘј нӮӨмӣҢ мЈјм—ҲлӢӨ. мқҙлЎңл¶Җн„° лӢӨмқҢкіј к°ҷмқҖ кІ°лЎ мқ„ м–»мқ„ мҲҳ мһҲм—ҲлӢӨ.
(1) лҹ¬лҚ” лІҢлёҢ л°Ҹ мәЎ мӮ¬мқҙ к°„к·№мқҙ мӢӨм„ кё°мӨҖ 50mmмқј кІҪмҡ°, 70mmмқј л•ҢліҙлӢӨ лӮҙл¶Җм—җ л°ңмғқн•ҳлҠ” мҷҖлҘҳк°Җ к°җмҶҢн•ҳм—¬ м Җн•ӯмқҙ к°җмҶҢн•ҳкі к·ёлЎң мқён•ҙ DHP м Җк°җ мёЎл©ҙм—җм„ң м•Ҫ 0.4%мқҳ мҡ°мҲҳн•ң м„ұлҠҘмқ„ к°Җ진лӢӨ.
(2) лҹ¬лҚ” лІҢлёҢмқҳ нҳ•мғҒмқҙ кө¬нҳ•мқј л•Ң, нҸүн–үн•ң нҳ•мғҒліҙлӢӨ нӣ„лҘҳмқҳ нҡҢм „мқ„ м–өм ңн•ҳм—¬ кі§кІҢ нҺҙмӨ„ мҲҳ мһҲм–ҙ DHPм Җк°җ мёЎл©ҙм—җм„ң м•Ҫ 0.8%мқҳ мҡ°мҲҳн•ң м„ұлҠҘмқ„ к°Җ진лӢӨ.
(3) KCSм„ л°•мқҳ кІҪмҡ° лҹ¬лҚ” лІҢлёҢмқҳ нҒ¬кё°к°Җ 1.2Hмқј л•Ң, 1.1H, 1.3Hмқё кІҪмҡ°ліҙлӢӨ нӣ„лҘҳмқҳ нҡҢм „мқ„ кі§кІҢ нҺҙмӨ„ мҲҳ мһҲм–ҙ м Җн•ӯ мёЎл©ҙм—җм„ңлҸ„ мң лҰ¬н•ҳл©° DHPм Җк°җ мёЎл©ҙм—җм„ңлҸ„ к°Ғк°Ғ м•Ҫ 0.5%, 0.3%мқҳ мҡ°мҲҳн•ң м„ұлҠҘмқ„ к°Җ진лӢӨ. л”°лқјм„ң лҹ¬лҚ” лІҢлёҢмқҳ м—°кө¬ мӢң мөңлҢҖ нҡЁмңЁмқ„ лӮҙлҠ” мөңм Ғ м§ҒкІҪмқҖ ліё м—°кө¬мҷҖ к°ҷмқҖ Case studyлҘј нҶөн•ҙ лҸ„м¶ңн•ҙм•ј н•ңлӢӨ.
(4) лҹ¬лҚ” лІҢлёҢмқҳ к°ҖлЎңл°©н–Ҙ м§ҒкІҪмқҙ м„ёлЎңл°©н–Ҙм—җ 비н•ҙ нҒ° нҳ•мғҒмқҖ лІҢлёҢ н‘ңл©ҙмқ„ л”°лқј нқҗлҘҙлҠ” мң м„ мқҙ лІҢлёҢ м „мІҙм—җ кұёміҗ кі лҘҙкІҢ 분нҸ¬лҗҳм–ҙ м Җн•ӯ мёЎл©ҙм—җм„ңлҸ„ мң лҰ¬н•ҳл©° лІҢлёҢмқҳ к°ҖлЎңл°©н–Ҙ нҒ¬кё°м—җ мқҳн•ҙ л°ҳлҘҳ비к°Җ м»Өм ё м„ к°ҒнҡЁмңЁ л°Ҹ мӨҖ추진нҡЁмңЁмқҙ мҰқк°Җн•ңлӢӨ. мөңмў…м ҒмңјлЎң 50mm к°„к·№м—җ 5В°мқҳ л°ңмӮ°к°Ғмқ„ к°Җм§ҖлҠ” мәЎ, к°ҖлЎң 1.4H, м„ёлЎң 1.2Hмқё 비лҢҖм№ӯ кө¬нҳ• лІҢлёҢм—җм„ң Bare hullлҢҖ비 к°ҖмһҘ лҶ’мқҖ 2.05%мқҳ DHP к°җмҶҢлҘј ліҙмҳҖмңјл©°, м„ н–үм—°кө¬мқё Tae(2017)мқҳ Twisted rudder лҢҖ비 0.73% DHP к°җмҶҢлҘј ліҙмҳҖлӢӨ.