


1. žĄú Ž°†
žĶúÍ∑ľ žąėž§Ď ÍĶ¨ž°įŽ¨ľ ŽįŹ Íłįžą†žĚė ž¶ĚÍįÄŽ°ú žĚłŪēėžó¨, Ž¨īžĚłžě†žąėž†ē(UUV, Unmanned underwater vehicle)žĚÄ žąėž§Ď Ūē≠ŪēīŽŅźŽßĆžĚī žēĄŽčąŽĚľ žąėž§Ď ÍĶ¨ž°įŽ¨ľžĚė ÍīÄŽ¶¨ ŽįŹ Ž≥īžąė, žĄ§žĻėžóź žĚīŽ•īŽäĒ Žč§žĖĎŪēú žěĄŽ¨īŽ•ľ žąėŪĖČŪēėÍ≤Ć ŽźėžóąŽč§. žĚīžóź ŽĒįŽĚľ Ž¨īžĚłžě†žąėž†ēžĚÄ ÍĶ¨ž°įŪôĒŽźėÍ≥† Ž≥Ķžě°Ūēú Í≥ĶÍįĄžóźžĄúžĚė žě•žčúÍįĄžĚė žěĄŽ¨ī žąėŪĖȞ󟎏Ą ž†ēŪôēŪēú žúĄžĻė ž∂Ēž†ē Íłįžą†žĚī žöĒÍĶ¨ŽźúŽč§. ŪēėžßÄŽßĆ, žąėž§Ď ÍĶ¨ž°įŪôĒŽźú ŪôėÍ≤Ş󟞥ú žě•žčúÍįĄ žúĄžĻė ž∂Ēž†ē žĄĪŽä•žĚĄ žú†žßÄŪēėŽäĒ Í≤ÉžĚÄ Žß§žöį žĖīŽ†§žöī žĚľžĚīŽč§(Paull et al., 2014; Marani and Choi, 2010).
žąėž§Ď žúĄžĻė ž∂Ēž†ēžčúžä§ŪÖúžĚÄ ŪĀ¨Í≤Ć Ž¨īžĚł žě†žąėž†ē ŽāīŽ∂ÄžĚė ÍīÄžĄĪŪē≠Ž≤ē žčúžä§ŪÖú(Inertial navigation system)žĚĄ žĚīžö©Ūēú žúĄžĻė ž∂Ēž†ēžčúžä§ŪÖúÍ≥ľ GPS(Global positioning system)žôÄ Ž¨īžĚł žě†žąėž†ē žôłŽ∂Äžóź žĄ§žĻėŽźú žĄľžĄúŽ•ľ žĚīžö©Ūēú žúĄžĻė ž∂Ēž†ē žčúžä§ŪÖú(Earth-fixed reference frame)žúľŽ°ú ŽāėŽąĆ žąė žěąŽč§. ŪēėžßÄŽßĆ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚė Í≤Ĺžöį Dead-reckoning žė§žį® ŽįŹ ŽĮłŽĀĄŽü¨žßź(Drift)žúľŽ°ú žĚłŪēėžó¨ žě•žčúÍįĄ žĚīžö© žčú Ž¨īžĚłžě†žąėž†ē žúĄžĻėž∂Ēž†ēžĚė žč†ŽĘįŽŹĄÍįÄ ŽĖ®žĖīžßĄŽč§(Li et al., 2013b; Karimi et al., 2013). žĚīŽ•ľ Í∑ĻŽ≥ĶŪēėÍłį žúĄŪēėžó¨, žôłŽ∂Ä žúĄžĻė ž∂Ēž†ē žčúžä§ŪÖúžĚĄ žā¨žö©Ūē† žąė žěąžúľŽāė, GPSžĚė Í≤Ĺžöį, žąėž§ĎžóźžĄú žč†Ūėł žąėžč†žĚī Ž∂ąÍįÄŽä•ŪēėÍłį ŽēĆŽ¨łžóź Mother shipžĚīŽāė Ž°úŽīážĚė Ž∂ÄžÉĀžĚī ŪēĄžöĒŪēėŽ©į, žÜĆŽāėŽ•ľ žĚīžö©Ūēú Based line systemžĚė Í≤Ĺžöį ŽäźŽ¶į ž†ĄŪĆĆžÜ掏Ą, Žč§ž§Ďžč†ŪėłŪö®Í≥ľ(Multi-path effect) ŽēĆŽ¨łžóź ÍĶ¨ž°įŪôĒŽźú Í≥ĶÍįĄžóźžĄú žā¨žö©ŪēėÍłį žĖīŽ†ĶŽč§(Kinsey et al., 2005; Akyildiz et al., 2005; Elibol et al., 2016).
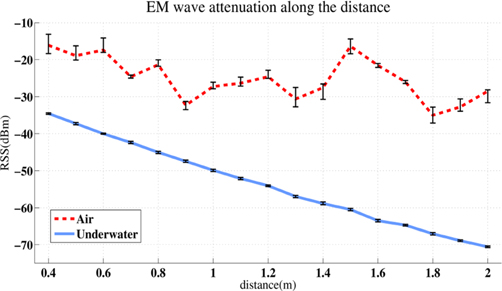
žúĄžóźžĄú žĖłÍłČŪēú Ž¨łž†úŽď§žĚĄ ŪēīÍ≤įŪēėÍłį žúĄŪēėžó¨, žöįŽ¶¨ŽäĒ ÍĪįŽ¶¨žóź ŽĒįŽ•ł ž†ĄžěźÍłįŪĆĆžĚė žč†ŪėłÍįźžá†Ž•ľ žĚīžö©Ūēėžó¨ ÍĪįŽ¶¨Ž•ľ ž∂Ēž†ēŪēėŽäĒ Žį©Ž≤ē(Range estimation scheme using received signal strength of electromagnetic wave)žĚĄ ž†úžēąŪēėžėÄŽč§. žĚī Žį©žčĚžĚÄ Í≥ĶÍłį ž§ĎžĚė žúĄžĻė ž∂Ēž†ēžĚĄ žúĄŪēėžó¨ ŽßéžĚī žā¨žö©Žźú Žį©Ž≤ēžĚīžóąžúľŽāė, Fig. 1Í≥ľ ÍįôžĚī žąėž§ĎžóźžĄúžĚė ÍĪįŽ¶¨žóź ŽĒįŽ•ł ÍłČÍ≤©Ūēú žč†Ūėł Íįźžá† ŽēĆŽ¨łžóź žąėž§ĎžóźžĄú žā¨žö©ŽźėžßÄ žēäžēėŽč§. ŪēėžßÄŽßĆ žąėž§Ď ŪôėÍ≤Ş󟞥úžĚė ž†ĄžěźÍłįŪĆĆŽäĒ Í≥ĶÍłį ž§ĎÍ≥ľ Žč¨Ž¶¨ ž£ľŽ≥Ä ŪôėÍ≤Ĺžóź žĚėŪēú žėĀŪĖ•žĚī ž†ĀÍ≥†, Ž∂ĄŪēīŽä•žĚī žĘčžúľŽ©į, ŽĻ†Ž•ł ž†ĄŪĆĆžÜ掏ĄŽ•ľ žĚīžö©Ūēú ŽÜížĚÄ žÉėŪĒĆŽßĀ žÜ掏Ą(Sampling rate)žĚĄ ÍįÄžßÄÍłį ŽēĆŽ¨łžóź Ž≥Ķžě°ŪēėÍ≥† ŽĻ†Ž•ł Ž¨ľž≤īžĚė žúĄžĻė ž∂Ēž†ēžóź ž†ĀŪē©ŪēėŽč§Í≥† Ūē† žąė žěąŽč§(Park et al., 2016b).
žąėž§ĎŪôėÍ≤Ş󟞥úžĚė ž†ĄžěźÍłįŪĆĆ žč†ŪėłÍįźžá†Ž•ľ žĚīžö©Ūēú žúĄžĻė ž∂Ēž†ēžĚĄ žúĄŪēėžó¨, ž†ÄžěźŽäĒ žąėž§ĎžóźžĄúžĚė ž†ĄžěźÍłįŪĆĆ Íįźžá† ŪäĻžĄĪžĚĄ Ž∂ĄžĄĚŪēėÍ≥† ÍĪįŽ¶¨žóź ŽĒįŽ•ł ž†ĄžěźÍłįŪĆĆ Íįźžá† Ž™®ŽćłžĚĄ ž†úžēąŪēėžėÄžúľŽ©į(Park et al., 2016a; Park et al., 2013), ž£ľŪĆĆžąė Ūē†ŽčĻŽį©žčĚÍ≥ľ žąėž§Ď Ž¨īžĄ† žĄľžĄúŽĄ§ŪäłžõĆŪĀ¨(Underwater wireless sensor network)Ž•ľ žĚīžö©Ūēėžó¨ žßßžĚÄ žĄľžĄú žā¨žö© Ž≤ĒžúĄžôÄ žĄľžĄú žčĚŽ≥Ą Ž¨łž†ú(Signal source identification problem)Ž•ľ ŪēīÍ≤įŪēėžėÄŽč§. žĚīŽ•ľ žĚīžö©Ūēėžó¨ žąėž§ĎŪôėÍ≤Ş󟞥ú RF(Radio frequency) žĄľžĄúÍįÄ ŽĻ†Ž•īÍ≥† ž†ēŽįÄŪēėÍ≤Ć žúĄžĻė ž∂Ēž†ēŪēėŽäĒ Í≤ɞ̥ ŪôēžĚłŪē† žąė žěąžóąŽč§(Park et al., 2015; Park et al., 2012).
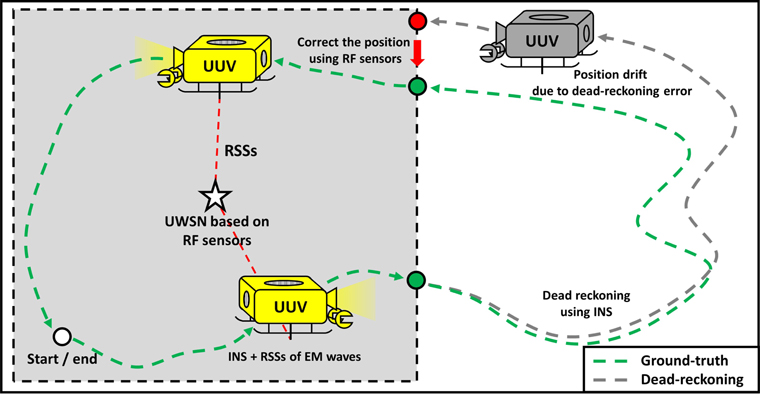
Ž≥ł ŽÖľŽ¨łžóźžĄúŽäĒ ž†ĄžěźÍłįŪĆĆžĚė Íįźžá†Ž•ľ žĚīžö©Ūēú ÍĪįŽ¶¨žł°ž†ē žĄľžĄú ŽįŹ žúĄžĻė ž∂Ēž†ēžčúžä§ŪÖúÍ≥ľ Íłįž°ī Ž¨īžĚłžě†žąėž†ēžĚė ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚĄ žúĶŪē©Ūēú žúĄžĻėž∂Ēž†ēŽį©Ž≤ē žĄ§Í≥Ą ŽįŹ žč§ŪóėžĚĄ žÜĆÍįúŪēėÍ≥†žěź ŪēúŽč§(Fig. 2). Ž¨īžĚłžě†žąėž†ēžĚė ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚÄ ÍīÄžĄĪžł°ž†ēžě•žĻė(Inertial measurement unit), AHRS(Attitude and heading reference system), ÍĻäžĚīžĄľžĄú ŽįŹ DVL(Doppler velocity log) ŽďĪžúľŽ°ú žĚīŽ£®žĖīžßÄÍ≤Ć ŽźėŽ©į, žĖĽžĖīžßÄŽäĒ ÍįÄžÜ掏Ą ŽįŹ žÜ掏Ą ž†ēŽ≥īŽ•ľ žĚīžö©Ūēėžó¨ Ž¨īžĚłžě†žąėž†ēžĚė žúĄžĻė ŽįŹ žěźžĄłŽ•ľ žėąžł°ŪēėÍ≤Ć ŽźúŽč§. ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžúľŽ°ú žĚłŪēú žúĄžĻėžė§žį®Ž•ľ ÍĶźž†ē(Correction)ŪēėÍłį žúĄŪēėžó¨, žúĄžĻėŽ•ľ ž∂Ēž†ēŪēėÍ≥†žěź ŪēėŽäĒ ž§ĎžöĒ Ž™©ŪĎú žßÄžó≠(žėą; ŽŹĄŪāĻ žėĀžó≠, ž£ľžöĒ žčúžĄ§Ž¨ľ ž£ľŽ≥Ä)žóź ž†ĄžěźÍłįŪĆĆ žĄľžĄúŽ•ľ žĚīžö©Ūēú žąėž§Ď Ž¨īžĄ†žĄľžĄúŽĄ§ŪäłžõĆŪĀ¨Ž•ľ ÍĶ¨ž∂ēŪēėÍ≥†, Í∑łŽ¶ľ 2žóźžĄúžôÄ ÍįôžĚī Ž¨īžĚłžě†žąėž†ēžĚī RF žĄľžĄú ž£ľŽ≥Äžóź žěąžĚĄ Í≤Ĺžöį žúĄžĻė Ž≥īž†ēžĚĄ ŪēúŽč§. žĚīŽü¨Ūēú žúĄžĻė žėąžł°Í≥ľ Ž≥īž†ēžĚÄ EKF(Extended Kalman filter) ÍĶ¨ž°įŽ°ú Ž¨īžĚłžě†žąėž†ēžĚė žöīžö© ž§Ď ŽįėŽ≥Ķž†ĀžúľŽ°ú žßĄŪĖČŪēúŽč§. žĚīŽ•ľ ŪÜĶŪēėžó¨ Ž¨īžĚłžě†žąėž†ēžĚÄ ÍĶ¨ž°įŪôĒŽźú Í≥ĶÍįĄžóźžĄúŽŹĄ ŽąĄž†Āžė§žį® žóÜžĚī žúĄžĻė žąėŪĖČžĚī ÍįÄŽä•ŪēėŽč§.
Ž≥ł ŽÖľŽ¨łžóźžĄúŽäĒ RF žĄľžĄúžôÄ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚĄ Ūē®ÍĽė žĚīžö©Ūēėžó¨ Ž¨īžĚłžě†žąėž†ēžĚė žúĄžĻė ž∂Ēž†ēžĚĄ žąėŪĖČŪēėžėÄŽč§. 2žě•žóźžĄúŽäĒ ž†úžēąŪēėŽäĒ žąėž§Ď žúĄžĻė ž∂Ēž†ēžčúžä§ŪÖúžóź ŽĆÄŪēīžĄú žěźžĄłŪēėÍ≤Ć žēĆžēĄŽ≥īÍ≥†, 3žě•žóźžĄúŽäĒ žā¨žö©Ūēú žĄľžĄú ŽįŹ žĄľžĄúŽ™®Žćł, žč§ŪóėŪôėÍ≤Ĺ ÍĶ¨žĄĪžóź ŽĆÄŪēīžĄú žāīŪéīŽ≥īžēėŽč§. 4žě•žóźžĄúŽäĒ žč§Ūóė ŽįŹ Í≤įÍ≥ľžóź ŽĆÄŪēīžĄú žĚīžēľÍłį ŪēėžėÄžúľŽ©į, ŽßąžßÄŽßČžúľŽ°ú 5žě•žóźžĄúŽäĒ žöĒžēĹ ŽįŹ Í≤įŽ°†žúľŽ°ú ŪĖ•ŪõĄ Žį©ŪĖ•žĚĄ ž†úžčúŪēėžėÄŽč§.
2. RF žĄľžĄúžôÄ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚĄ žĚīžö©Ūēú žúĄžĻė ž∂Ēž†ē žčúžä§ŪÖú
Ž≥ł žě•žóźžĄúŽäĒ RF žĄľžĄúžôÄ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚĄ žĚīžö©Ūēú žúĄžĻė ž∂Ēž†ē žčúžä§ŪÖúžĚĄ žúĄŪēėžó¨, žĘĆŪĎúÍ≥Ą ŽįŹ žč¨Ž≤Ć(Symbol) ž†ēžĚė, EKF ÍĶ¨ž°į, žėąžł° Žč®Í≥ĄžôÄ Ž≥īž†ē Žč®Í≥ĄžóźžĄúžĚė žó≠Ūē†, ÍĪįŽ¶¨žĄľžĄú Ž™®Žćłžóź ŽĆÄŪēīžĄú žÜĆÍįúŪēėÍ≥†žěź ŪēúŽč§.
2.1 3žį®žõź žĘĆŪĎúÍ≥Ą ŽįŹ žěźžĄłž†ēŽ≥ī ž†ēžĚė
žčúžä§ŪÖú žĄ§Ž™Öžóź žē장ú, 3žį®žõź žĘĆŪĎúÍ≥Ą(3D coordinate) ŪôėÍ≤Ş󟞥úžĚė žúĄžĻėžôÄ žěźžĄłž†ēŽ≥īŽ•ľ ž†ēžĚėŪēėÍ≥†žěź ŪēúŽč§. Ž¨īžĚłžě†žąėž†ēžĚī 3žį®žõź žąėž§Ď ŪôėÍ≤Ş󟞥ú žöīžö©Žź† ŽēĆ, Ž°úŽīážĚė žúĄžĻėžôÄ žěźžĄłŽ•ľ ŽāėŪÉÄŽāīŽäĒ ͳĎ°úŽ≤Ć žěźžĄł(Global state) Ž≤°ŪĄį nxžôÄ Ž°úžĽ¨ žěźžĄł(Local state) Ž≤°ŪĄį bxŽäĒ 3žį®žõź žú†ŪĀīŽ¶¨ŽĒĒžēą Í≥ĶÍįĄžóźžĄúžĚė ŽĆÄžĻ≠ Í∑łŽ£Ļ(Three-dimensional euclidean group: E(3))žóźžĄú ž†ēžĚėŽźúŽč§(Thurston and Levy, 1997). žčúÍįĄ tžóźžĄú žĚė Ž°úŽīá žěźžĄłŽäĒ žúĄžĻė Ž∂ÄŽ∂ĄžĚĄ ŽāėŪÉÄŽāīŽäĒ žúĄžĻė Ž≤°ŪĄį rtžôÄ žė§žĚľŽü¨ ÍįĀŽŹĄ(Euler angle vector) őõtŽ°ú ŽāėŪÉÄŽāľ žąė žěąžúľŽ©į, žĚīŽü¨Ūēú žěźžĄłŽäĒ žēĄŽěė žčĚ (1)Í≥ľ Fig. 3Í≥ľ ÍįôžĚī ž†ēžĚėŽźúŽč§.

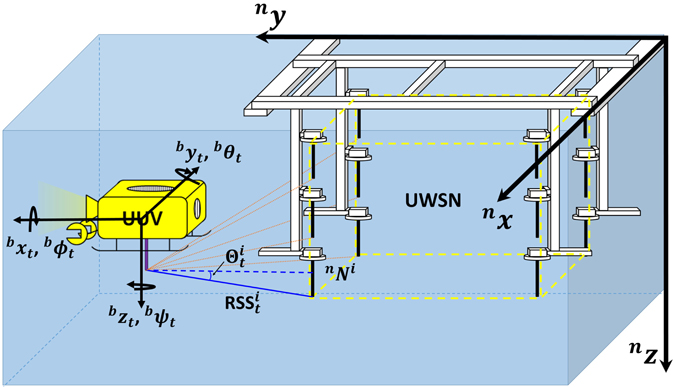
 žĚÄ žčúÍįĄ tžóźžĄú iŽ≤ąžßł Í≥†ž†ēŽźú ŽÖłŽďú(anchor node, AN: ŽĮłŽ¶¨ žßÄž†ēŽźú žúĄžĻėžóź žĄ§žĻėŽźú žĄľžĄú)Ž°úŽ∂ÄŪĄį žÜ°žč†Žźú žč†ŪėłÍįÄ Ž™®ŽįĒžĚľ ŽÖłŽďú(Mobile node, MN: žúĄžĻė ž∂Ēž†ēŪēėÍ≥†žěź ŪēėŽäĒ Ž™©ŪĎúŽ¨ľž≤ī)žóźžĄú žąėžč†ŽźėžóąžĚĄ ŽēĆ, ž†ĄžěźÍłįŪĆĆžĚė žąėžč†žĄłÍłį(RSS)Ž•ľ žĚėŽĮłŪēúŽč§. ŽėźŪēú
žĚÄ žčúÍįĄ tžóźžĄú iŽ≤ąžßł Í≥†ž†ēŽźú ŽÖłŽďú(anchor node, AN: ŽĮłŽ¶¨ žßÄž†ēŽźú žúĄžĻėžóź žĄ§žĻėŽźú žĄľžĄú)Ž°úŽ∂ÄŪĄį žÜ°žč†Žźú žč†ŪėłÍįÄ Ž™®ŽįĒžĚľ ŽÖłŽďú(Mobile node, MN: žúĄžĻė ž∂Ēž†ēŪēėÍ≥†žěź ŪēėŽäĒ Ž™©ŪĎúŽ¨ľž≤ī)žóźžĄú žąėžč†ŽźėžóąžĚĄ ŽēĆ, ž†ĄžěźÍłįŪĆĆžĚė žąėžč†žĄłÍłį(RSS)Ž•ľ žĚėŽĮłŪēúŽč§. ŽėźŪēú  ŽäĒ iŽ≤ąžßł Í≥†ž†ēŽźú ŽÖłŽďúžôÄ Ž™®ŽįĒžĚľ ŽÖłŽďú žā¨žĚīžĚė žÉĀŪēėÍįĀ(Elevation angle)žĚĄ žĚėŽĮłŪēėŽ©į, žį®ŪõĄžóź žĄľžĄú Ž™®Žćł ŽįŹ žú†Ūö®Ūēú žč†ŪėłŽ•ľ ÍĶ¨Ž∂ĄŪēėŽäĒŽćį žā¨žö©ŽźúŽč§(Park et al., 2016a).
ŽäĒ iŽ≤ąžßł Í≥†ž†ēŽźú ŽÖłŽďúžôÄ Ž™®ŽįĒžĚľ ŽÖłŽďú žā¨žĚīžĚė žÉĀŪēėÍįĀ(Elevation angle)žĚĄ žĚėŽĮłŪēėŽ©į, žį®ŪõĄžóź žĄľžĄú Ž™®Žćł ŽįŹ žú†Ūö®Ūēú žč†ŪėłŽ•ľ ÍĶ¨Ž∂ĄŪēėŽäĒŽćį žā¨žö©ŽźúŽč§(Park et al., 2016a).2.2 Ūôēžě• žĻľŽßĆŪēĄŪĄį ÍłįŽįė Ž¨īžĚłžě†žąėž†ē žúĄžĻėž∂Ēž†ē žčúžä§ŪÖú
Ž¨īžĚłžě†žąėž†ēžĚė ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúÍ≥ľ RF žĄľžĄúžôÄžĚė žĄľžĄúžúĶŪē©žĚĄ žúĄŪēėžó¨, Ūôēžě• žĻľŽßĆŪēĄŪĄį ÍłįŽįėžúľŽ°ú žúĄžĻė ž∂Ēž†ēžčúžä§ŪÖúžĚĄ žĄ§Í≥ĄŪēėžėÄŽč§. žĻľŽßĆŪēĄŪĄįŽäĒ žėąžł°ÍĶ¨ÍįĄ(Prediction phase)žôÄ ÍĶźž†ēÍĶ¨ÍįĄ(Correction or update phase)žúľŽ°ú ÍĶ¨Ž∂ĄŽźėŽ©į, ŽĎź ÍĶ¨ÍįĄžĚĄ žčúÍįĄžĚė ŪĚźŽ¶Ąžóź ŽĒįŽĚľ ŽįėŽ≥Ķž†ĀžúľŽ°ú žßĄŪĖČŪē®žúľŽ°úžć®, Ž¨īžĚł žě†žąėž†ēžĚė žúĄžĻėŽ•ľ ž∂Ēž†ēŪē† žąė žěąŽč§.
žėąžł°ÍĶ¨ÍįĄžóźžĄú Ž¨īžĚłžě†žąėž†ēžĚÄ žúĄžĻėžĚė ž∂Ēž†ēÍįí(Position probability)  Í≥ľ žěźžĄłžĚė ž∂Ēž†ēÍįí(Orientation probability)
Í≥ľ žěźžĄłžĚė ž∂Ēž†ēÍįí(Orientation probability)  žĚĄ Ž¨īžĚłžě†žąėž†ē ŽāīŽ∂ÄžĚė žĄľžĄú(DVL, IMU, AHRS, Depth sensor)žôÄ žĚīž†Ą stepžĚė žúĄžĻėžěźžĄł ž†ēŽ≥ī (nrt‚ąí1, nőõt‚ąí1)Ž•ľ žĚīžö©Ūēėžó¨ žėąžł°ŪēúŽč§.
žĚĄ Ž¨īžĚłžě†žąėž†ē ŽāīŽ∂ÄžĚė žĄľžĄú(DVL, IMU, AHRS, Depth sensor)žôÄ žĚīž†Ą stepžĚė žúĄžĻėžěźžĄł ž†ēŽ≥ī (nrt‚ąí1, nőõt‚ąí1)Ž•ľ žĚīžö©Ūēėžó¨ žėąžł°ŪēúŽč§.
Í≥ľ žěźžĄłžĚė ž∂Ēž†ēÍįí(Orientation probability) žĚĄ Ž¨īžĚłžě†žąėž†ē ŽāīŽ∂ÄžĚė žĄľžĄú(DVL, IMU, AHRS, Depth sensor)žôÄ žĚīž†Ą stepžĚė žúĄžĻėžěźžĄł ž†ēŽ≥ī (nrt‚ąí1, nőõt‚ąí1)Ž•ľ žĚīžö©Ūēėžó¨ žėąžł°ŪēúŽč§.ÍĶźž†ēÍĶ¨ÍįĄžĚÄ Ž¨īžĚłžě†žąėž†ēžĚī RF žĄľžĄúŽ°ú ÍĶ¨žĄĪŽźú žąėž§ĎŽ¨īžĄ†žĄľžĄúŽĄ§Ūäł žõĆŪĀ¨ žēąžóź žÜćŪē† Í≤ĹžöįžóźŽßĆ žßĄŪĖČŽźúŽč§. žąėž§Ď Ž¨īžĄ† Ž™®ŽįĒžĚľ ŽÖłŽďúžóźžĄú žąėžč†ŽźėŽäĒ žú†Ūö®Ūēú RSSžĚė ÍįúžąėÍįÄ 3Íįú žĚīžÉĀžĚľ ŽēĆ, žĖĽžĖīžßÄŽäĒ RSSŽ•ľ žĄľžĄú Ž™®ŽćłžĚĄ žĚīžö©Ūēėžó¨ ÍĪįŽ¶¨ ÍįížúľŽ°ú Ž≥ÄŪôė ŪõĄ žāľŽ≥Äžł°ŽüČ(Trilateration) ÍłįŽ≤ēžĚĄ žĚīžö©Ūēėžó¨ žúĄžĻėŽ•ľ ž∂Ēž†ēŪēėÍ≤Ć ŽźúŽč§. žĚī žúĄžĻė ž†ēŽ≥īŽäĒ žúĄžĻė ž∂Ēž†ēÍįí žĚĄ žĻľŽßĆ ÍįÄž§ĎžĻėžóź ŽĒįŽĚľžĄú Ž≥īž†ēŪēėŽ©į, žúĄžĻė nrtŽ•ľ ÍĶ¨ŪēúŽč§. žėąžł°ÍĶ¨ÍįĄÍ≥ľ Ž≥īž†ēÍĶ¨ÍįĄžĚė žěźžĄłŪēú žĄ§Ž™ÖžĚÄ žēĄŽěė žě•žóź žĄ§Ž™ÖŪēėžėÄŽč§(Thrun et al., 2005; Djugash et al., 2006; Menegatti et al., 2009).
žĚĄ žĻľŽßĆ ÍįÄž§ĎžĻėžóź ŽĒįŽĚľžĄú Ž≥īž†ēŪēėŽ©į, žúĄžĻė nrtŽ•ľ ÍĶ¨ŪēúŽč§. žėąžł°ÍĶ¨ÍįĄÍ≥ľ Ž≥īž†ēÍĶ¨ÍįĄžĚė žěźžĄłŪēú žĄ§Ž™ÖžĚÄ žēĄŽěė žě•žóź žĄ§Ž™ÖŪēėžėÄŽč§(Thrun et al., 2005; Djugash et al., 2006; Menegatti et al., 2009).2.3. žėąžł° ÍĶ¨ÍįĄ
žėąžł° ÍĶ¨ÍįĄžóźžĄú, žúĄžĻė ŽįŹ žěźžĄł ž∂Ēž†ēÍįí(, )žĚÄ Ž¨īžĚłžě†žąėž†ē ŽāīŽ∂ÄžĚė žĄľžĄúŽ°úŽ∂ÄŪĄį žĖĽŽäĒŽč§. Ž≥ł ŽÖľŽ¨łžóźžĄú žā¨žö©Žźú Ž¨īžĚłžě†žąėž†ēžĚė ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚÄ Ž¨īžĚłžě†žąėž†ē žĄ§Í≥Ą ŽÖľŽ¨ł(Li et al., 2013a; Won et al., 2015) žĚĄ žįłÍ≥†ŪēėžėÄŽč§.
, )žĚÄ Ž¨īžĚłžě†žąėž†ē ŽāīŽ∂ÄžĚė žĄľžĄúŽ°úŽ∂ÄŪĄį žĖĽŽäĒŽč§. Ž≥ł ŽÖľŽ¨łžóźžĄú žā¨žö©Žźú Ž¨īžĚłžě†žąėž†ēžĚė ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚÄ Ž¨īžĚłžě†žąėž†ē žĄ§Í≥Ą ŽÖľŽ¨ł(Li et al., 2013a; Won et al., 2015) žĚĄ žįłÍ≥†ŪēėžėÄŽč§.žúĄžĻėž∂Ēž†ē žčúÍįĄ tžóź, žôÄ žĚÄ žĚīž†Ą žčúÍįĄ t ‚ąí 1žóźžĄúžĚė žúĄžĻė žěźžĄł ž†ēŽ≥ī(nrt‚ąí1, nőõt‚ąí1)žôÄ Ž¨īžĚłžě†žąėž†ē ŽāīŽ∂ÄžĚė žĄľžĄúŽ°úŽ∂ÄŪĄį žēĄŽěėžôÄ ÍįôžĚī Í≥ĄžāįŽźúŽč§.
žôÄ žĚÄ žĚīž†Ą žčúÍįĄ t ‚ąí 1žóźžĄúžĚė žúĄžĻė žěźžĄł ž†ēŽ≥ī(nrt‚ąí1, nőõt‚ąí1)žôÄ Ž¨īžĚłžě†žąėž†ē ŽāīŽ∂ÄžĚė žĄľžĄúŽ°úŽ∂ÄŪĄį žēĄŽěėžôÄ ÍįôžĚī Í≥ĄžāįŽźúŽč§.
žó¨ÍłįžĄú vtŽäĒ žėąžł°Í≥ľž†ēžóźžĄú žÉĚÍłįŽäĒ žė§žį®Ž°úžĄú ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚė žė§žį®Ž°ú Ž≥ľ žąė žěąŽč§(Li et al., 2012). ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžóźžĄú žĖĽžĖīžßÄŽäĒ žúĄžĻėž†ēŽ≥īŽäĒ Ž¨īžĚłžě†žąėž†ē ŪĒĄŽ†ąžěĄ žÉĀžóźžĄúžĚė žúĄžĻėžĚīŽĮÄŽ°ú, žĚīŽ•ľ ͳĎ°úŽ≤Ć žĘĆŪĎúÍ≥ĄŽ°ú žĖĽÍłį žúĄŪēīžĄúŽäĒ žēĄŽěėžôÄ ÍįôžĚÄ Í≥ĄžāįžĚī ŪēĄžöĒŪēėŽč§.

žó¨ÍłįžĄú,  žôÄ
žôÄ  ŽäĒ Ž¨īžĚłžě†žąėž†ēÍ≥ľ ͳĎ°úŽ≤Ć žĘĆŪĎúÍ≥ĄÍįĄžĚė žĘĆŪĎúŽ≥ÄŪôė ŪĖČŽ†¨žĚīŽ©į žēĄŽěėžôÄ ÍįôžĚī ŽāėŪÉÄŽāľ žąė žěąŽč§.
ŽäĒ Ž¨īžĚłžě†žąėž†ēÍ≥ľ ͳĎ°úŽ≤Ć žĘĆŪĎúÍ≥ĄÍįĄžĚė žĘĆŪĎúŽ≥ÄŪôė ŪĖČŽ†¨žĚīŽ©į žēĄŽěėžôÄ ÍįôžĚī ŽāėŪÉÄŽāľ žąė žěąŽč§.
žôÄ ŽäĒ Ž¨īžĚłžě†žąėž†ēÍ≥ľ ͳĎ°úŽ≤Ć žĘĆŪĎúÍ≥ĄÍįĄžĚė žĘĆŪĎúŽ≥ÄŪôė ŪĖČŽ†¨žĚīŽ©į žēĄŽěėžôÄ ÍįôžĚī ŽāėŪÉÄŽāľ žąė žěąŽč§.

žó¨ÍłįžĄú s, c, tŽäĒ ÍįĀÍįĀ sin, cos, tanŽ•ľ žĚėŽĮłŪēúŽč§.
2.4. žąėž§Ď Ž¨īžĄ† žĄľžĄú ŽĄ§ŪäłžõĆŪĀ¨ ÍłįŽįė Ž≥īž†ē ÍĶ¨ÍįĄ
žąėž§Ď Ž¨īžĄ† žĄľžĄú ŽĄ§ŪäłžõĆŪĀ¨Ž•ľ Ž™©ŪĎú žúĄžĻėž∂Ēž†ē žėĀžó≠žóź žĄ§žĻėŪē† ŽēĆ, Í≥†ž†ēŽźú ŽÖłŽďúÍįĄžĚė ž£ľŪĆĆžąė Ūē†ŽčĻ(Frequency allocation) ž†ēŽ≥ī ŽįŹ ͳĎ°úŽ≤Ć žĘĆŪĎúÍ≥ĄžóźžĄúžĚė žúĄžĻė ž†ēŽ≥īŽäĒ žĄúŽ°ú Í≥Ķžú†ŪēúŽč§. ŽėźŪēú Í≥†ž†ēŽźú ŽÖłŽďúžôÄ Ž™®ŽįĒžĚľ ŽÖłŽďúÍįĄžĚė ŽÜížĚīžį®žĚī(őł)žóź ŽĒįŽĚľ žĄľžĄúžĚė žā¨žö©Ž≤ĒžúĄ ŽįŹ žúĄžĻėž∂Ēž†ē žĄĪŽä•žĚī Ž≥ÄŪôĒŪēėÍ≤Ć ŽźėŽĮÄŽ°ú, Í≥†ž†ēŽźú ŽÖłŽďúŽď§žĚÄ X ‚ąí Yž∂ēžúľŽ°ú žłĶ(Layer)žĚĄ žĚīŽ£®Í≤Ć ŽźėŽ©į, ÍįĀÍįĀžĚė žłĶŽď§žĚÄ ž†ĀŽčĻŪēú ŽÜížĚī žį®žĚīŽ•ľ žú†žßÄŪē† žąė žěąŽŹĄŽ°Ě žĄ§žĻėŪēúŽč§.
Ž¨īžĚłžě†žąėž†ē žöīžö© ž§Ď, ÍįĀÍįĀžĚė Í≥†ž†ēŽźú ŽÖłŽďúŽäĒ Ūē†ŽčĻŽźú Í≥†žú† ž£ľŪĆĆžąėŽ°ú ž†ĄžěźÍłįŪĆĆŽ•ľ žÜ°žč†ŪēėŽ©į, Ž™®ŽįĒžĚľ ŽÖłŽďúŽäĒ žąėžč†žĚī ÍįÄŽä•Ūēú ž£ľŪĆĆžąėžôÄ Í∑łŽēĆžĚė ž†ĄžěźÍłįŪĆĆ žĄłÍłįŽ•ľ žąėžč†ŪēúŽč§. žąėžč†Žźú žč†Ūėł ž§ĎžóźžĄú žč†ŽĘįžĄĪ žěąŽäĒ ž†ĄžěźÍłįŪĆĆŽ•ľ ÍĶ¨Ž∂ĄŪēėÍłį žúĄŪēėžó¨, Ž™®ŽįĒžĚľ ŽÖłŽďúŽäĒ ÍĻäžĚī žĄľžĄú ŽįŹ žĚīž†Ą Žč®Í≥ĄžĚė žúĄžĻėž†ēŽ≥īŽ•ľ žĚīžö©Ūēėžó¨ ÍįĀÍįĀžĚė Í≥†ž†ēŽźú ŽÖłŽďúžôÄžĚė žÉĀŪēėÍįĀžĚĄ ÍĶ¨ŪēėÍ≥†, žĚī žÉĀŪēėÍįĀžĚī Íłįž§Ä ÍįížĚł HPBW(Half power beam width) Ž≥īŽč§ žěĎžĚÄ ÍįíŽßƞ̥ žúĄžĻė ž∂Ēž†ēžóź žā¨žö©ŪēúŽč§. Ž™®ŽįĒžĚľ ŽÖłŽďúŽäĒ žúĄžĻė ž†ēŽ≥īŽ•ľ žóÖŽćįžĚīŪäł ŪēúŽč§.
žĚīŽ†áÍ≤Ć žĖĽžĖīžßÄŽäĒ ž†ĄžěźÍłįŪĆĆžĚė žąęžěźÍįÄ žĄł Íįú žĚīžÉĀžĚľ ŽēĆ, ÍįĀÍįĀžĚė Í≥†ž†ēŽźú ŽÖłŽďú n NižôÄ Ž™®ŽįĒžĚľ ŽÖłŽďú ÍįĄ žĖĽžĖīžßÄŽäĒ ž†ĄžěźÍłįŪĆĆžĚė žąėžč† žĄłÍłį ŽäĒ žĄľžĄú Ž™®ŽćłžĚĄ ŪÜĶŪēėžó¨ ÍĪįŽ¶¨ ž†ēŽ≥ī  Ž°ú Ž≥ÄŪôėŪē† žąė žěąŽč§(2.5ž†ą). žĚīŽēĆ Ž™®ŽįĒžĚľ ŽÖłŽďúŽäĒ žąėžč†Žźú ž†ĄžěźÍłįŪĆĆžĚė ž£ľŪĆĆžąėŽ•ľ ŪÜĶŪēėžó¨ žĖīŽäź Í≥†ž†ēŽźú ŽÖłŽďúŽ°úŽ∂ÄŪĄį žč†ŪėłÍįÄ žąėžč†ŽźėžóąŽäĒžßÄ ŪôēžĚłŪēėŽ©į, žĚīŽ†áÍ≤Ć žĖĽžĖīžßÄŽäĒ ÍĪįŽ¶¨ ž†ēŽ≥īŽď§žĚĄ žāľŽ≥Äžł°ŽüȞ̥ žĚīžö©Ūēėžó¨ Ž™®ŽįĒžĚľ ŽÖłŽďú žúĄžĻėŽ•ľ ž∂Ēž†ēŪēėŽ©į, žĚīŽ•ľ žĻľŽßĆ ŪēĄŪĄįŽ•ľ žĚīžö©Ūēėžó¨ žĚīž†Ąžóź žėąžł°Žźú žúĄžĻėŽ•ľ Ž≥īž†ēŪē®žúľŽ°úžć®, Ž¨īžĚłžě†žąėž†ēžĚė žúĄžĻėŽ•ľ ž∂Ēž†ēŪē† žąė žěąŽč§. RF žĄľžĄúŽ•ľ žĚīžö©Ūēú žúĄžĻė Ž≥īž†ēÍ≥ľž†ēžĚÄ žúĄžĚė žēĆÍ≥†Ž¶¨ž¶ė 1žĚĄ ŪÜĶŪēėžó¨ Ž≥ľ žąė žěąŽč§.
Ž°ú Ž≥ÄŪôėŪē† žąė žěąŽč§(2.5ž†ą). žĚīŽēĆ Ž™®ŽįĒžĚľ ŽÖłŽďúŽäĒ žąėžč†Žźú ž†ĄžěźÍłįŪĆĆžĚė ž£ľŪĆĆžąėŽ•ľ ŪÜĶŪēėžó¨ žĖīŽäź Í≥†ž†ēŽźú ŽÖłŽďúŽ°úŽ∂ÄŪĄį žč†ŪėłÍįÄ žąėžč†ŽźėžóąŽäĒžßÄ ŪôēžĚłŪēėŽ©į, žĚīŽ†áÍ≤Ć žĖĽžĖīžßÄŽäĒ ÍĪįŽ¶¨ ž†ēŽ≥īŽď§žĚĄ žāľŽ≥Äžł°ŽüȞ̥ žĚīžö©Ūēėžó¨ Ž™®ŽįĒžĚľ ŽÖłŽďú žúĄžĻėŽ•ľ ž∂Ēž†ēŪēėŽ©į, žĚīŽ•ľ žĻľŽßĆ ŪēĄŪĄįŽ•ľ žĚīžö©Ūēėžó¨ žĚīž†Ąžóź žėąžł°Žźú žúĄžĻėŽ•ľ Ž≥īž†ēŪē®žúľŽ°úžć®, Ž¨īžĚłžě†žąėž†ēžĚė žúĄžĻėŽ•ľ ž∂Ēž†ēŪē† žąė žěąŽč§. RF žĄľžĄúŽ•ľ žĚīžö©Ūēú žúĄžĻė Ž≥īž†ēÍ≥ľž†ēžĚÄ žúĄžĚė žēĆÍ≥†Ž¶¨ž¶ė 1žĚĄ ŪÜĶŪēėžó¨ Ž≥ľ žąė žěąŽč§.
ŽäĒ žĄľžĄú Ž™®ŽćłžĚĄ ŪÜĶŪēėžó¨ ÍĪįŽ¶¨ ž†ēŽ≥ī Ž°ú Ž≥ÄŪôėŪē† žąė žěąŽč§(2.5ž†ą). žĚīŽēĆ Ž™®ŽįĒžĚľ ŽÖłŽďúŽäĒ žąėžč†Žźú ž†ĄžěźÍłįŪĆĆžĚė ž£ľŪĆĆžąėŽ•ľ ŪÜĶŪēėžó¨ žĖīŽäź Í≥†ž†ēŽźú ŽÖłŽďúŽ°úŽ∂ÄŪĄį žč†ŪėłÍįÄ žąėžč†ŽźėžóąŽäĒžßÄ ŪôēžĚłŪēėŽ©į, žĚīŽ†áÍ≤Ć žĖĽžĖīžßÄŽäĒ ÍĪįŽ¶¨ ž†ēŽ≥īŽď§žĚĄ žāľŽ≥Äžł°ŽüȞ̥ žĚīžö©Ūēėžó¨ Ž™®ŽįĒžĚľ ŽÖłŽďú žúĄžĻėŽ•ľ ž∂Ēž†ēŪēėŽ©į, žĚīŽ•ľ žĻľŽßĆ ŪēĄŪĄįŽ•ľ žĚīžö©Ūēėžó¨ žĚīž†Ąžóź žėąžł°Žźú žúĄžĻėŽ•ľ Ž≥īž†ēŪē®žúľŽ°úžć®, Ž¨īžĚłžě†žąėž†ēžĚė žúĄžĻėŽ•ľ ž∂Ēž†ēŪē† žąė žěąŽč§. RF žĄľžĄúŽ•ľ žĚīžö©Ūēú žúĄžĻė Ž≥īž†ēÍ≥ľž†ēžĚÄ žúĄžĚė žēĆÍ≥†Ž¶¨ž¶ė 1žĚĄ ŪÜĶŪēėžó¨ Ž≥ľ žąė žěąŽč§.
2.5. ÍĪįŽ¶¨ žĄľžĄúŽ™®Žćł
ž†ĄžěźÍłįŪĆĆžĚė žč†Ūėł žĄłÍłįŽ•ľ žĚīžö©Ūēėžó¨ ŽÖłŽďúÍįĄžĚė ÍĪįŽ¶¨Ž•ľ ž∂Ēž†ēŪēėÍłį žúĄŪēīžĄúŽäĒ žąėžč†Ž∂Ğ󟞥ú žĖĽžĖīžßÄŽäĒ ž†ĄžěźÍłįŪĆĆ žĄłÍłįŽ•ľ ÍĪįŽ¶¨ ž†ēŽ≥īŽ°ú Ž≥ÄŪôėŪēėžó¨žēľ ŪēúŽč§. Í≥ĶÍłį ž§ĎžóźžĄúžĚė ÍĪįŽ¶¨žóź ŽĒįŽ•ł ž†ĄžěźÍłįŪĆĆ žĄłÍłįŽäĒ Friis ž†ĄžÜ° Í≥ĶžčĚ(Friis transmission formula)Ž•ľ žĚīžö©Ūēėžó¨ Ž≥ÄŪôėŪē† žąė žěąŽč§(Friis and Rumson, 1971). ŪēėžßÄŽßĆ žĚī ÍĪįŽ¶¨ Ž™®ŽćłžĚÄ Žß§žßąžĚī žßĄÍ≥Ķ ŽėźŽäĒ žßĄÍ≥Ķžóź ž§ÄŪēėŽäĒ Í≥ĶÍłįŽ°ú ÍįÄž†ēŪēėÍłį ŽēĆŽ¨łžóź Ž¨ľÍ≥ľ ÍįôžĚī žč†ŪėłžĚė ŪĚ°žąė ŽįŹ Íįźžá†ÍįÄ ŪĀį Žß§žßąžóźžĄúŽäĒ žĚīŽ•ľ ž†Āžö©Ūē† žąė žóÜŽč§. Í∑łŽü¨ŽĮÄŽ°ú žąėž§ĎžóźžĄú ž†ĄžěźÍłįŪĆĆžĚė Íįźžá† Ž™®ŽćłžĚĄ žĖĽÍłį žúĄŪēīžĄúŽäĒ žÉąŽ°úžöī ÍĪįŽ¶¨ Ž™®ŽćłžĚī ŪēĄžöĒŪēėŽč§.
žĚīŽ•ľ žúĄŪēīžĄú ž†ÄžěźŽäĒ Íłįž°īžĚė Friis ž†ĄžÜ° Í≥ĶžčĚÍ≥ľ Žß§žßąžóźžĄúžĚė Maxwell Íįźžá† žÉĀžąė(Maxwell‚Äôs attenuation constant formula)žĚĄ žĚīžö©Ūēėžó¨ ŪäĻž†ē Žß§žßąžóźžĄúžĚė ÍĪįŽ¶¨žóź ŽĒįŽ•ł Íįźžá† Ž™®ŽćłžĚĄ ž†úžčúŪēėžėÄžóąŽč§(Balanis, 2012; Park et al., 2016a). žĚī žč̞󟞥ú, žčúÍįĄ tŽēĆ Í≥†ž†ēŽźú ŽÖłŽďú ižôÄžĚė ÍĪįŽ¶¨()žóź ŽĒįŽ•ł žąėžč† ž†ĄžěźÍłįŪĆĆ žĄłÍłį()ŽäĒ Íįźžá† žÉĀžąė(őĪ)Ž•ľ žĚīžö©Ūēėžó¨ žēĄŽěėžôÄ ÍįôžĚī ŽāėŪÉÄŽāľ žąė žěąŽč§.
)žóź ŽĒįŽ•ł žąėžč† ž†ĄžěźÍłįŪĆĆ žĄłÍłį()ŽäĒ Íįźžá† žÉĀžąė(őĪ)Ž•ľ žĚīžö©Ūēėžó¨ žēĄŽěėžôÄ ÍįôžĚī ŽāėŪÉÄŽāľ žąė žěąŽč§.
žó¨ÍłįžĄú őďiŽäĒ ÍĪįŽ¶¨ ŽįŹ ž†ĄžěźÍłįŪĆĆ žÜ°žąėžč† ÍĪįŽ¶¨žôÄ žÉĀÍīÄžóÜžĚī žēąŪÖĆŽāėžôÄ ŪôėÍ≤Ĺžóź žĚėŪēīžĄú Í≤įž†ēŽźėŽäĒ žÉĀžąė, eŽäĒ žěźžóį žÉĀžąėŽ•ľ ŽāėŪÉÄŽāłŽč§. őďiŽäĒ žēĄŽěėžôÄ ÍįôžĚī ŽāėŪÉÄŽāľ žąė žěąŽč§.

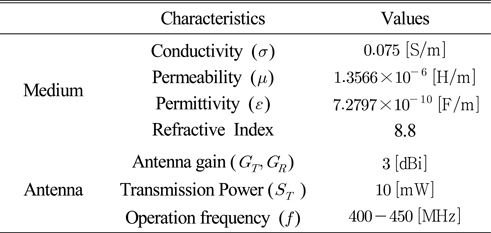
žó¨ÍłįžĄú PLEŽäĒ ÍįĀ žēąŪÖĆŽāėÍįĄžĚė ŪéłÍīĎÍįĀ, GTŽäĒ žÜ°žč†žēąŪÖĆŽāė žĚīŽďĚ(Gain), GRžĚÄ žąėžč†žēąŪÖĆŽāėžĚė žĚīŽďĚ, fŽäĒ ž£ľŪĆĆžąė(Frequency), nžĚÄ ÍĶīž†ąžú®(Refractive index), wŽäĒ žēĆŽ†§žßÄžßÄ žēäžĚÄ ž∂ĒÍįÄž†ĀžĚł Íįźžá†žöĒžĚł(žěĄŪĒľŽćėžä§ Ž∂Äž†ĀŪē©, ŽŹôž∂ēžľÄžĚīŽłĒ žÜźžč§ ŽďĪ)žĚĄ ŽāėŪÉÄŽāłŽč§.(Park et al., 2012).
3. žč§ Ūóė
ž†úžēąŽźú ž†ĄžěźÍłįŪĆĆžĚė Íįźžá†Ž•ľ žĚīžö©Ūēú žúĄžĻė ž∂Ēž†ēÍłįŽ≤ēžĚĄ Í≤Äž¶ĚŪēėÍłį žúĄŪēėžó¨, Žč§žĚĆÍ≥ľ ÍįôžĚī Í≥ĶŪēôžąėž°įžóź žč§ŪóėŪôėÍ≤Ş̥ ÍĶ¨žĄĪŪēėžėÄŽč§.
3.1 žč§Ūóė ŪôėÍ≤Ĺ
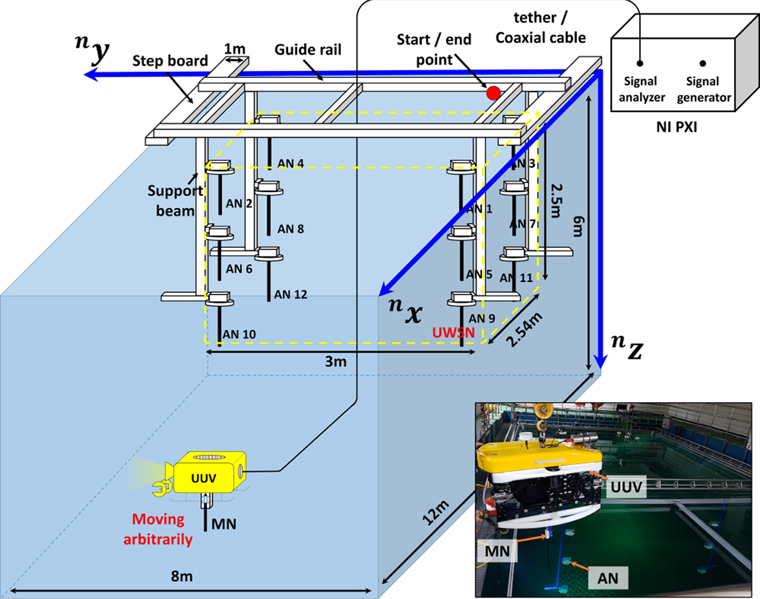
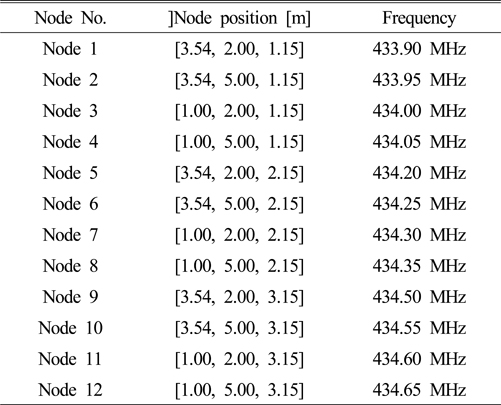
žöįŽ¶¨ŽäĒ ž†úžēąŽźú žúĄžĻė ž∂Ēž†ē žčúžä§ŪÖúžĚĄ Í≤Äž¶ĚŪēėÍłį žúĄŪēėžó¨ KIRO(Korea Institute of Robot and Convergence)žĚė žßÄŪēėžąėž°į(ÍįÄŽ°ú 12m, žĄłŽ°ú 8m, ÍĻäžĚī 6mžĚė ŽĮľŽ¨ľ žąėž°į)žóź Fig. 4žôÄ ÍįôžĚÄ žč§Ūóė ŪôėÍ≤Ş̥ ÍĶ¨ž∂ēŪēėžėÄŽč§. žĄľžĄúŽĄ§ŪäłžõĆŪĀ¨ŽäĒ ÍįÄŽ°ú 2.5m, žĄłŽ°ú 3mžóź Í≥†ž†ēŽźú ŽÖłŽďú 12ÍįúŽ°ú ÍĶ¨žĄĪŽźėžóąžúľŽ©į, žēĆŽ£®ŽĮłŽäĄ ŪĒĄŽ†ąžěĄžĚĄ žĚīžö©Ūēėžó¨ ÍįĀ ŽÖłŽďúŽď§žĚĄ Í≥†ž†ēŪēėžėÄŽč§. 12ÍįúžĚė Í≥†ž†ēŽźú ŽÖłŽďúŽď§žĚÄ žąėž§Ď Ž¨īžĄ†žĄľžĄúŽĄ§ŪäłžõĆŪĀ¨žĚė ÍįĀ Ž™®žĄúŽ¶¨ ŽįŹ Íľ≠žßźžóź žĄ§žĻėŽźėžóąžúľŽ©į, Í≥†žú†žĚė Ūē†ŽčĻŽźú ž£ľŪĆĆžąėŽ°ú ž†ĄžěźÍłįŪĆĆŽ•ľ žÜ°žč†ŪēėžėÄŽč§. ÍįĀÍįĀžĚė Í≥†ž†ēŽźú ŽÖłŽďú žúĄžĻėžôÄ ž£ľŪĆĆžąėŽäĒ Table 2žôÄ ÍįôŽč§.
3.2 žĄľžĄú ž†úžěĎ
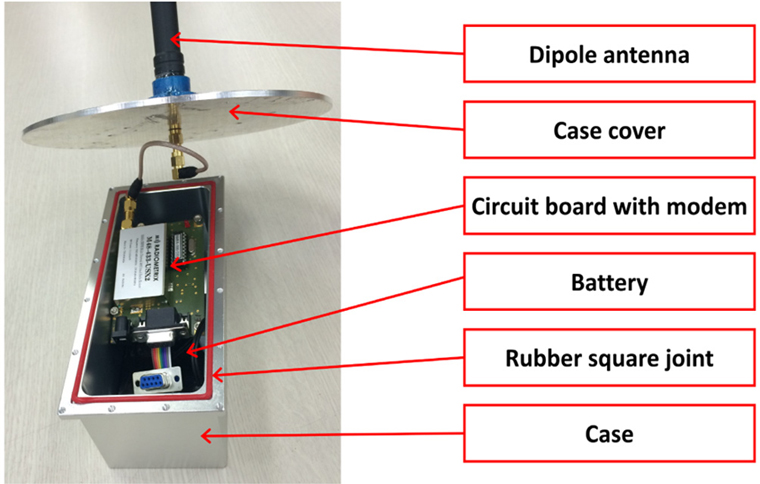
žÉĀžö©ŪíąžĚł RF Ž™®ŽďąžĚĄ žąėž§ĎžóźžĄú Í≥†ž†ēŽźú ŽÖłŽďúŽ°ú žā¨žö©ŪēėÍłį žúĄŪēėžó¨ Fig. 5žôÄ ÍįôžĚī žąėž§Ď Ž¨īžĄ† žĄľžĄúŽ•ľ ž†úžěĎŪēėžėÄŽč§. žĚī žĄľžĄúŽäĒ žĄľžĄú žľÄžĚīžä§ ŽįŹ žēąŪÖĆŽāė, Ž™®Žďą, ŽįįŪĄįŽ¶¨Ž°ú ÍĶ¨žĄĪŽźėžĖī žěąžúľŽ©į, žĄľžĄúžĚė ŪĀ¨ÍłįŽäĒ 180mm(W)√ó180mm(L)√ó500mm(H)žĚīŽč§. žēąŪÖĆŽāėžĚė ž†Ą Žį©ŪĖ•žĄĪ(Omni-directional) ž†ĄŪĆĆŪäĻžĄĪžĚĄ žú†žßÄŪēėÍłį žúĄŪēėžó¨ žľÄžĚīžä§ ŽöúÍĽĎžĚÄ žõźŪėēžúľŽ°ú žĄ§Í≥ĄŽźėžóąžúľŽ©į, Žį©žąėŽ•ľ žúĄŪēėžó¨ Í≥†Ž¨ī ž°įžĚłŪäł(Rubber joint) ŽįŹ Í∑łŽ¶¨žä§(Grease)Ž•ľ žĚīžö©ŪēėžėÄŽč§. ŪöĆŽ°ú ŽįŹ Ž™®ŽďąžĚÄ Radiomatrixžā¨žĚė USX2Ž•ľ žā¨žö©ŪēėžėÄžúľŽ©į, žĄľžĄúžĚė žēąŪÖĆŽāėŽäĒ 3dBi ž†ĄŽį©ŪĖ•žĄĪ žÉĀžö© žēąŪÖĆŽāėŽ•ľ žā¨žö©ŪēėžėÄŽč§. žěźžĄłŪēú žĄľžĄú žā¨žĖĎžĚÄ ŪĎú 2Í≥ľ ÍįôŽč§.
žĄľžĄúžĚė žúĄžĻė ž∂Ēž†ēžĄĪŽä•žĚĄ ŪôēžĚłŪēėÍłį žúĄŪēėžó¨, Ž™®ŽįĒžĚľ ŽÖłŽďúŽäĒ National Instrumentsžā¨žĚė Signal analyzeržôÄ ŽŹôž∂ēžľÄžĚīŽłĒžĚĄ žĚīžö©Ūēėžó¨ žóįÍ≤įŪēėžėÄŽč§. ŽŹôž∂ēžľÄžĚīŽłĒžĚÄ žč§Ž¶¨žĹė Ūėłžä§Ž•ľ žĚīžö©Ūēėžó¨ Žį©žąėž≤ėŽ¶¨ ŪēėžėÄžúľŽ©į, Ž™®ŽįĒžĚľŽÖłŽďúŽäĒ 1kHzžĚė žÉėŪĒĆŽßĀ ž£ľÍłįŽ°ú Í≥†ž†ēŽźú ŽÖłŽďúŽ°úŽ∂ÄŪĄį žč†ŪėłŽ•ľ žąėžč†Ūēėžó¨ žä§žä§Ž°úžĚė žúĄžĻėŽ•ľ ž∂Ēž†ēŪēėžėÄŽč§.
3.3 ÍĪįŽ¶¨ žĄľžĄúŽ™®Žćł žĄ§Í≥Ą
Í≥†ž†ēŽźú ŽÖłŽďúŽ°úŽ∂ÄŪĄį žĖĽžĖīžßĄ ž†ĄžěźÍłįŪĆĆ žĄłÍłįŽ°úŽ∂ÄŪĄį ÍĪįŽ¶¨ ž†ēŽ≥īŽ•ľ žĖĽÍłį žúĄŪēīžĄú, ž†ÄžěźŽäĒ 2.5ž†ąžóźžĄú ÍĶ¨Ūēú ÍĪįŽ¶¨ žĄľžĄúŽ™®ŽćłžĚĄ žč§ŪóėŪôėÍ≤Ş󟞥ú Í≤Äž¶ĚŪēėžėÄŽč§. žĄľžĄúŽ™®Žćłžóź žā¨žö©Žźú ŪôėÍ≤Ĺ Í≥Ąžąė ŽįŹ žēąŪÖĆŽāė ž†ēŽ≥īŽäĒ Table 3žôÄ ÍįôŽč§. ž†ÄžěźŽäĒ Table 3žĚė ŪôėÍ≤Ĺ Í≥ĄžąėŽ•ľ žčĚ (6), (7)žóź ŽĆÄžěÖŪē®žúľŽ°úžĄú, žēĄŽěėžôÄ ÍįôžĚÄ ÍĪįŽ¶¨ žĄľžĄúŽ™®ŽćłžĚĄ žĖĽžĚĄ žąė žěąžóąŽč§.

žĖĽžĖīžßĄ ÍĪįŽ¶¨ žĄľžĄúŽ™®ŽćłžĚė žĄĪŽä•žĚĄ Í≤Äž¶ĚŪēėÍłį žúĄŪēėžó¨, žč§ŪóėžĚĄ ŪÜĶŪēėžó¨ ÍĪįŽ¶¨žóź ŽĒįŽ•ł RSS ÍįížĚĄ žĖĽžĚÄ ŪõĄ, Fig. 6Í≥ľ ÍįôžĚī žĄľžĄúŽ™®ŽćłÍ≥ľ ŽĻĄÍĶźŪēėžėÄŽč§. žč§ŪóėÍ≤įÍ≥ľ ÍĪįŽ¶¨ žĄľžĄúŽ™®ŽćłžĚÄ žč§Ūóė Í≤įÍ≥ľžôÄ ÍĪįžĚė ŽŹôžĚľŪē®žĚĄ ŪôēžĚłŪē† žąė žěąžóąŽč§.

3.4 žč§Ūóė Í≥ľž†ē
Ž¨īžĚłžě†žąėž†ēžĚė ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúÍ≥ľ ÍīÄžĄĪŪē≠Ž≤ē ŽįŹ RF žĄľžĄúžôÄžĚė žĄľžĄúžúĶŪē© žĄĪŽä•žĚĄ ŽĻĄÍĶźŪē®žúľŽ°úžć®, ž†úžēąŽźú žúĄžĻėž∂Ēž†ē žčúžä§ŪÖúžĚė žĄĪŽä•žĚĄ Í≤Äž¶ĚŪēėžėÄŽč§. žĚī žč§ŪóėžóźžĄú Ž¨īžĚłžě†žąėž†ēžĚė žúĄžĻėŽäĒ Ž¨īžĚłžě†žąėž†ē žöīžö©žěźÍįÄ žěĄžĚėŽ°ú 10-15Ž∂Ą ŽŹôžēą žöīžö©ŪēėžėÄžúľŽ©į, ž≤ėžĚĆ žúĄžĻėŽ°ú ŪöĆÍ∑ÄŪēėžėÄŽč§. ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúÍ≥ľ RF žĄľžĄúŽäĒ Ž¨īžĚłžě†žąėž†ēžĚė žúĄžĻėŽ•ľ ž∂ĒžĘÖŪēėžėÄžúľŽ©į, žúĄžĻė ž∂Ēž†ē Í≤įÍ≥ľŽ•ľ ŽĻĄÍĶźŪēėžėÄŽč§.
3.5 žč§Ūóė Í≤įÍ≥ľ
Fig. 7žĚÄ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚė žúĄžĻėž∂Ēž†ēÍ≤įÍ≥ľžôÄ ÍīÄžĄĪŪē≠Ž≤ē ŽįŹ RF žĄľžĄúŽ•ľ žúĶŪē©Ūēú žúĄžĻėž∂Ēž†ēÍ≤įÍ≥ľŽ•ľ ŽāėŪÉÄŽāłŽč§. Ground-truth ž†ēŽ≥īŽ•ľ žĖĽÍłį žĖīŽ†§žöī ŪôėÍ≤ĹžĚīÍłį ŽēĆŽ¨łžóź, ž†ąŽĆÄž†ĀžĚł žúĄžĻė ž∂Ēž†ē Í≤įÍ≥ľ ŽĻĄÍĶźŽäĒ žĖīŽ†§žõ†Žč§.
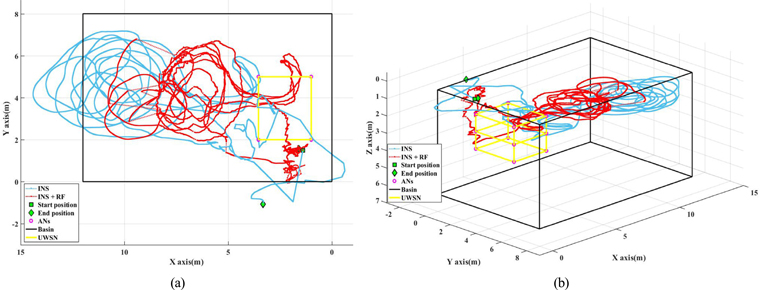
ÍīÄžĄĪŪē≠Ž≤ēŽßƞ̥ žā¨žö©Ūēú žúĄžĻė ž∂Ēž†ēÍ≤įÍ≥ľŽäĒ Dead-reckoning žė§žį®žôÄ žĄľžĄúžĚė Žįúžāį ŽēĆŽ¨łžóź žč†ŽĘįŪēėÍłį žĖīŽ†§žöī žúĄžĻėž∂Ēž†ē Í≤įÍ≥ľŽ•ľ žĖĽžĚĄ žąė žěąžóąŽč§. Í≤įÍ≥ľž†ĀžúľŽ°ú žúĄžĻė ž∂Ēž†ē žčúžěĎž†źÍ≥ľ žĘÖŽ£Ćž†źžā¨žĚīžĚė ÍĪįŽ¶¨ÍįÄ Žß§žöį ŪĀ¨Í≤Ć ŽāėŪÉÄŽā¨Žč§.
ŽįėŽ©īžóź, ÍīÄžĄĪŪē≠Ž≤ēÍ≥ľ RF žĄľžĄúŽ•ľ ŽŹôžčúžóź žā¨žö©Ūē®žúľŽ°úžć®, Ž¨īžĚłžě†žąėž†ēžĚī žąėž§Ď Ž¨īžĄ† žĄľžĄú ŽĄ§ŪäłžõĆŪĀ¨žóź ÍįÄÍĻĆžõĆžßą ŽēĆŽßąŽč§ Dead- reckoning žóźŽü¨ÍįÄ Ž≥īž†ēŽźėŽäĒ Í≤ɞ̥ ŪôēžĚłŪē† žąė žěąžóąžúľŽ©į, ŽĻ†Ž•ł žÉėŪĒĆŽßĀ žÜ掏Ą ŽćēŽ∂Ąžóź ÍīÄžĄĪŪē≠Ž≤ēžĚė ŽįúžāįžóźŽŹĄ ž†ēŪôēŪēú žúĄžĻė ž∂Ēž†ēÍ≤įÍ≥ľŽ•ľ žĖĽžĚĄ žąė žěąžóąŽč§. Í≤įÍ≥ľž†ĀžúľŽ°ú žúĄžĻėž∂Ēž†ē žčúžěĎž†źÍ≥ľ žĘÖŽ£Ćž†źžĚī ÍĪįžĚė žĚľžĻėŪē®žĚĄ ŪôēžĚłŪē† žąė žěąžóąŽč§.
4. Í≤į Ž°†
Ž≥ł ŽÖľŽ¨łžóźžĄú, žöįŽ¶¨ŽäĒ žąėž°įžôÄ ÍįôžĚÄ ÍĶ¨ž°įŪôĒŽźú Í≥ĶÍįĄžóźžĄúžĚė ž†ēŽįÄŪēú žúĄžĻė ž∂Ēž†ē ŽįŹ ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúžĚė ŽįúžāįžĚĄ Žį©žßÄŪēėÍłį žúĄŪēėžó¨ ž†ĄžěźÍłįŪĆĆžĚė Íįźžá†Ž•ľ žĚīžö©Ūēú žúĄžĻėž∂Ēž†ēžčúžä§ŪÖúžĚĄ ž†úžēąŪēėžėÄŽč§. ž†úžēąŽźú RF žĄľžĄúŽäĒ žąėž§Ď Ž¨īžĄ†žĄľžĄú ŽĄ§ŪäłžõĆŪĀ¨Ž•ľ ÍĶ¨žĄĪŪēėÍ≥†, ÍīÄžĄĪŪē≠Ž≤ēžčúžä§ŪÖúÍ≥ľ žĻľŽßĆŪēĄŪĄį ÍĶ¨ž°įŽ•ľ žĚīŽ£®Ž©į žúĄžĻėŽ•ľ Ž≥īž†ēŪēėŽ©į, žĚīŽ•ľ žĚīžö©Ūēėžó¨ Í∑ľž†ĎŪēú Ž¨īžĚłžě†žąėž†ēžĚė žúĄžĻėŽ•ľ Ž≥īž†ēŪēėžėÄŽč§. ž†úžēąŽźú žúĄžĻėž∂Ēž†ē žčúžä§ŪÖúžĚÄ ÍīÄžĄĪŪē≠Ž≤ē žčúžä§ŪÖúŽßƞ̥ žĚīžö©Ūēú žúĄžĻėž∂Ēž†ēÍ≤įÍ≥ľžôÄ ŽĻĄÍĶźŪēėžėÄžúľŽ©į, žĚīŽ•ľ ŪÜĶŪēėžó¨ ÍĶ¨ž°įŪôĒŽźú Í≥ĶÍįĄžóźžĄú žě•žčúÍįĄžĚė žúĄžĻėž∂Ēž†ēžóź ž†ĀŪē©Ūē®žĚĄ Í≤Äž¶ĚŪēėžėÄŽč§.
Žč§ŽßĆ, žč§ž†ú žĖīŪĒĆŽ¶¨žľÄžĚīžÖėžĚĄ žúĄŪēīžĄúŽäĒ Ž≥īŽč§ ŽßéžĚÄ žóįÍĶ¨ÍįÄ ŪēĄžöĒ Ūē† Í≤ÉžĚīŽč§. Ž®ľž†Ä, Ž¨īžĄ†žĄľžĄúŽĄ§ŪäłžõĆŪĀ¨žĚė žě•žčúÍįĄ žú†žßÄŽ•ľ žúĄŪēú Žį©Ž≤ēžúľŽ°ú ANžĚė žú†žĄ†ŪôĒ ŽėźŽäĒ ž†ąž†ĄŽ™®Žďú(Sleeping protocol) ŽďĪžĚė žĄľžĄú žĄ§Í≥ĄÍįÄ ŪēĄžöĒŪē† Í≤ÉžĚīŽ©į, Ž≥īŽč§ ŽĄďžĚÄ žĖĎÍįĀžóźžĄú žā¨žö©ŪēėÍłį žúĄŪēú žēąŪÖĆŽāė žĄ§Í≥ĄÍįÄ žöĒÍĶ¨ŽźúŽč§. ŽėźŪēú Ūēīžąė ŪôėÍ≤Ş󟞥ú žā¨žö©ŪēėÍłį žúĄŪēú ž†Āž†ąŪēú ž£ľŪĆĆžąė Í≤Äž¶ĚžĚī žĄ†ŪĖČŽźėžĖīžēľ Ūē† Í≤ÉžĚīŽč§.




