다중상태 소나시스템을 적용한 표적반향음 연구 - Part II : 수치모델링과 실험적 검증
Investigation of Target Echoes in Multi-static SONAR system - Part II : Numerical Modeling with Experimental Verification
Article information
Trans Abstract
A multi-static SONAR system consists of the transmitters and receivers separately in space. The active target echoes are received along the transmitter-target-receiver path and depend on the shape and aspect angle of the submerged objects at each receiver. Thus, the target echo algorithm used with a mono-static system, in which the transmitter and receiver are located at the same position, has limits in simulating the target echoes for a multi-static SONAR system. In this paper, a target echo modeling procedure for a 3D submerged object in space is described based on the Kirchhoff approximation, and the SONAR system is extended to a multi-static SONAR system. The scattered field from external structures is calculated on the visible surfaces, which is determined based on the locations of the transmitter and receiver. A series of experiments in an acoustic water tank was conducted to measure the target echoes from scaled targets with a single transmitter and 16 receivers. Finally, the numerical results were compared with experimental results and shown to be useful for simulating the target echoes/target strength in a multi-static SONAR system.
1. 서 론
송신기와 수신기를 분리하여 운용하는 다중상태 소나시스템 (Multi-static SONAR system)은 공간상에 배치된 다중 수신기에 수집되는 음향정보들을 종합적으로 활용하는 시스템으로, 천해지역의 감시/경계 기능의 측면에서 단상태 소나시스템 (Mono-static SONAR system)의 운용보다 수중표적의 탐지영역을 확장시키고, 능동 핑에 대해 회피하는 표적에 대해서도 그 효과를 증대시킬 수 있는 장점으로 최근 많이 활용되고 있다. 이러한 능동소나시스템의 표적반향음(Target echoes)은 수중에서 송신된 음원신호가 표적에서 반사/산란되어 되돌아오는 음향신호로 표적탐지의 중요한 정보수단으로써, 다중상태 소나시스템의 경우 입사파(Incident wave)가 표적의 경계면에서 반향될 때의 표적의 외부형상(External structure), 표적자세각 (Aspect angle), 그리고 송/수신기의 배치에 따라 분리된 각각의 수신기로 반향되는 음장형성의 기여도가 달라지게 된다. 이는 다중상태 능동소나의 수신신호 특성파악을 위해 다중 송/수신기로 구성된 격자형태의 분산 센서망을 활용한 수조실험을 통해 확인된 바 있으며(Bae et al., 2013), 이러한 현상은 기존의 단상태 표적반향음 모델링 방법으로 해석하기에 한계가 있기 때문에 다중상태 소나시스템으로 확장된 표적반향음 모델링 구현의 필요성이 요구된다.
국내외에서는 능동소나 표적반향음의 신호모의에 관하여 이론적 접근방법을 중심으로 진행되어 왔다. 국내에서는 1990년대 능동소나의 개발과 동시에 성능평가를 위한 신호발생 목적으로 음원과 표적의 3 차원 운동을 고려한 단순한 타원체의 하이라이트(High light, HL) 분포표적모델을 이용한 표적반향음 합성에 관한 연구가 수행되었다(Seong et al., 1994; Kim et al., 1997). 이후, 더욱 정밀한 표적반향음의 재현을 위해 수중의 3차원 표적형상모델을 고려한 하이라이트 모델에 관한 연구가 수행되어 왔다(Kim et al., 2001; Shin et al., 2001; Kim et al., 2013; You et al., 2014). 그러나 하이라이트 모델은 계산량의 효율 측면에서 강점이 있는 반면, 표적형상에 대한 대표적인 하이라이트만을 적용하여 신호를 모의하기 때문에 실제와 유사한 표적반향음을 재현하는데 어려움이 있다. 따라서, 수치해석 기법을 적용하여 표적의 기하학적 형상에 따른 후방산란 (Backscattering) 신호모의 및 표적강도(Target strength, TS) 예측에 관한 연구가 진행되었다(Lee et al., 2005; Kim et al., 2007; Kim et al., 2008; Kwon et al., 2011).
또한, 국외에서도 복잡한 표적형상에 대해 고주파수 해석기법을 적용하여 외부형상에 대한 반향음의 해석에 관한 연구를 수행했으며(Maxit et al., 2004; Schneider and Friedler, 2003), 특히, Nguyen and Lew(2002)와 Hazen et al.(2002), 그리고 Lew(2004)는 단수의 송/수신기가 분리된 양상태소나각(Bi-static angle)에 따른 표적반향음의 모의/해석에 관한 연구를 수행하였다.
이와 같이 단상태 소나시스템에 대한 표적반향음의 알고리즘 구현과 모의결과를 통한 해석 등의 연구와 양상태 소나시스템의 반향특성에 대한 부분적 연구가 진행되어 왔으나 다중상태 소나시스템의 경우는 현재 미비한 실정이며, 최근 능동 표적탐지에 다수의 송/수신기를 운용하는 탐지개념이 도입되면서 다중상태 환경에서의 표적반향음의 모의에 관한 연구가 요구되었다.
본 논문에서는 고주파수 수치해석 근사법인 Kirchhoff approximation을 적용하여 다중상태 소나시스템으로 확장된 표적반향음 모델링 방법을 제안하고 이를 통한 활용성에 대해 제시하고자 한다. 선행논문(Bae et al., 2014)에 의해 설계된 다중상태 축소표적시험 시스템을 통해 측정된 시험자료를 활용하여 축소표적모델과 단일 송신기, 그리고 16개의 수신기 배치에 따른 반향특성을 설명하고, 음향수조시험 환경과 동일한 조건에서 모의된 시계열 신호와 시험자료를 비교하여 본 연구를 통해 제안된 알고리즘을 검증하고자 한다.
2. 다중상태 표적반향음 모델링
수중의 3 차원 표적격자모델에 대해 송/수신기를 물리적으로 분리시켜 공간상에 정의된 송신기-표적-수신기의 구조적 배치에 따른 표적격자모델의 기하학적 가시영역 판별 알고리즘을 구현하고, 음향산란영역 Ka ≫ 1의 고주파수 수치해석 기법인 Kirchhoff approximation을 적용하여 다중상태 능동소나 표적반향음의 모델링 방법을 제안하고자 한다.
2.1 Kirchhoff approximation
어떤 공간상에서 평면파(Plane wave)가 경계면에 입사/산란되어 임의의 위치에 유기되는 음압 U(x,y,z,t)은 Helmholtz- Kirchhoff 적분식인 식 (1)에 의해 표현된다(Clay et al., 1977).

S 는 면적을 갖는 경계면이며, k는 파수(=2𝜋/λ=w/c), r은 음원과 경계면과의 거리, 그리고 n은 경계면의 법선방향을 나타낸다. 경계면 S 상에서의 산란음압 U 는 식 (2)와 같이 음원에 의해 경계면에 입사되는 음압 Us과 미소평면에서의 반사계수 R과의 곱으로 표현되며, 법선방향에 대한 편미분항인 식 (3)으로 전개할 수 있다.


경계면에 입사되는 음압 Us 는 단극자(Monopole) 음원을 가정하였을 때의 해석해인 식 (4)로 표현가능하며, 식 (2)~(4)를 이용하면 최종적으로 임의의 위치에 유기되는 음압 U(x,y,z,t)은 식(5)로 표현된다.


p0 는 기준음압, r0 는 기준거리, 𝜙i,s 는 송/수신기 위치에서 표적의 경계면에 대한 입사각과 반사각, ri,s 는 송신기-경계면, 그리고 경계면-수신기까지의 기하학적 거리, NVisb는 가시영역의 경계면의 개수, 그리고 dA 는 경계면의 면적을 나타낸다. 단상태 소나시스템은 송/수신기가 동일한 위치(𝜙i = 𝜙s =𝜙, ri=rs=r)이므로 간단하게 정리될 수 있지만, 본 논문에서 적용한 송/수신기가 분리된 다중상태 소나시스템은 공간상 표적에 대해 독립적으로 배치된 송신기-표적-수신기의 기하학적 경로(𝜙i ≠𝜙s , ri ≠rs )를 고려한 표적의 경계면으로부터 형성된 음압으로 정리된다. 최종적인 식 (5)로 부터 다중상태 표적반향음은 송/수신기의 배치에 따라 평면파가 표적으로 입사/반사되는 가시영역 면적에 대한 적분을 수행하여 도출된 응답함수( )를 이용하여 모의된다.
)를 이용하여 모의된다.
2.2 시계열 신호 모의
Fig. 2는 다중상태 환경에서 수중 3 차원 표적에 대한 능동소나 표적반향음의 시계열신호(Time-series)를 모의하기 위한 과정을 나타낸다. 먼저, 수치해석 모델링을 위해 전처리과정에서 격자망 형태로 생성된 3 차원의 표적격자모델을 전체좌표계의 공간상에 정의하고, 송신기와 수신기는 오일러 변환(Euler transform)을 이용하여 표적 주변에 배치하여 다중상태 소나환경을 정의한다. 동시에 능동소나의 송신신호 S(t) 를 생성하여 푸리에 변환(Fast Fourier transform) 및 대역필터를 통해 원하는 주파수 영역의 함수 S(w)로 변환한다. Kirchhoff approximation을 이용한 식 (5)의 산란음장은 모든 경계면이 아닌, 실제 음파가 도달하는 가시영역에 대한 음장의 적분을 수행하며, 본 논문의 2.4 절에서 송/수신기 방향의 기하학적 후면 및 은면을 제거하는 알고리즘을 적용하여 최종 가시영역을 추출한다.
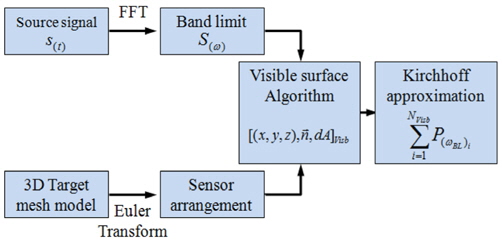
Procedure for simulating the target echoes
따라서, 시간영역의 표적반향음  은 정의된 표적의 외부형상과 소나환경을 고려하여 계산된 산란음장에 대한 응답함수
은 정의된 표적의 외부형상과 소나환경을 고려하여 계산된 산란음장에 대한 응답함수  와 대역폭을 갖는 송신신호의 주파수 영역의 함수 S(w)의 곱에 대한 식 (7)의 역 푸리에변환(Inverse Fast Fourier transform)을 이용하여 모의된다.
와 대역폭을 갖는 송신신호의 주파수 영역의 함수 S(w)의 곱에 대한 식 (7)의 역 푸리에변환(Inverse Fast Fourier transform)을 이용하여 모의된다.


P(wBL)는 식 (5)에 의해 구해진 각각의 주파수 응답함수로 식 (6) 에 의해 사용된 주파수대역(wBL)에 대한 응답함수의 총합 으로 표현되며, i는 표적의 경계면을 구성하는 격자의 인덱스를 나타낸다.
2.3 단순 평판표적에 대한 수치해석
Kirchhoff approximation을 적용한 다중상태 표적반향음 모의 알고리즘을 검증하기 위해 Table 1과 같은 조건의 단순한 형상을 갖는 평판표적에 대한 반향음을 모의하였다. Fig. 3은 동일평면상에 배치된 단일 송신기와 37개의 수신기 위치를 나타내며, 원거리 음장조건(r ≫L2/λ)을 고려하여 송/수신기는 표적의 중심으로부터 10m 거리에 배치하였다. 이 때, 송신신호는 사용 주파수의 10 파장 정현파 신호를 사용하였다.
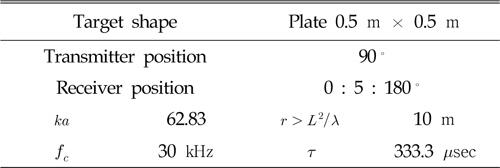
Experimental conditions

Arrangement of transmitter and receivers
Fig. 4는 x축 선상을 기준으로 90°의 위치에 고정된 단일 송신기의 음원신호가 표적에서 반향되어 37개의 각 수신기 방향으로 형성되는 표적반향음을 나타내며, 이 경우 해석적으로 평판표적과 송/수신기의 기하학적 구조에 의해 거울면반사가 발생되는 방향의 수신기 위치에서 강한 반향음이 형성되는 것을 예측할 수 있다. 수치해석 결과 단일 송신기 위치에 대한 거울면반사는 평판중심의 법선벡터에 대한 입사각과 반사각이 동일해지는 90°방향에서 형성되며 이 때, 송/수신기와 표적의 기하학적 거리 10m에 대한 표적반향음의 수신시점(Arrival time)은 0.0133s으로 동일한 시간에 강한 반향음이 형성되는 것을 관찰함으로써 본 수치해석의 신뢰성을 입증하였다.
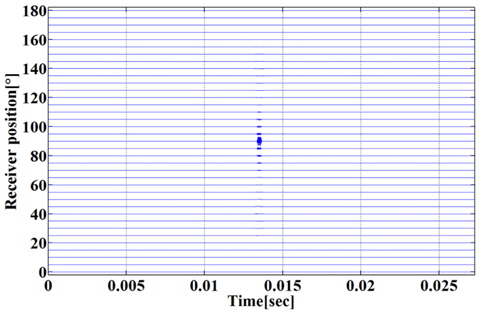
Fig. 4의 수신기의 위치에 대한 시계열 신호 중 90°의 수신기 위치에서 형성된 표적반향음은 기존에 구현된 단상태 소나시스템에 대한 반향음성분이며, 거울면반사가 발생되는 수신기 위치를 기준으로 반사각에서 벗어나는 위치의 다중 수신기에서는 점차 약한 표적반향음이 형성된다. 따라서, 본 논문에서 제안하는 Kirchhoff approximation을 적용한 표적반향음 모의 알고리즘은 거울면반사에 대한 유효한 결과를 도출하였으며, 기하학적 해석이 용이한 단순한 평판표적에 대한 수치실험 결과를 바탕으로 실제 수중운동체와 유사한 표적에 대해 다중상태 소나시스템으로 확장하여 능동소나의 표적반향음을 모의한다.
2.4 3 차원 표적격자모델 정의
Kirchhoff approximation을 적용한 표적반향음을 모의하기 위해서는 표적의 외부형상에 대한 3 차원 격자망 좌표 데이터의 추출이 선행되어야 하며, 표적모델을 정의하기 위해 Fig. 5와 같은 전처리과정(Pre-processing)을 수행한다. 본 수치해석에서 사용된 표적형상은 실제 축소표적시험을 위해 설계된 3 차원 모델링 형상과 동일하며, 음향수조시험에서 측정된 시험자료와 비교를 통해 수치해석 모델링의 검증을 수행하고자 한다. 실제 축소표적모델의 제작 목적으로 설계된 3D CATIA 모델을 이용하여 Fig. 5(a)와 같이 선수부(Bow)-몸체(Hull)-선미부(Stern)의 외부형상으로 구성된 3 차원 표적모델을 생성하고, 격자망 생성 프로그램인 Hypermesh를 이용하여 Fig. 5(b)와 같이 표적의 외부표면을 분할된 격자망의 각 절점에 대한 (x, y, z)좌표로 변환하여 MATLAB을 이용한 후처리 및 해석을 수행하였다.
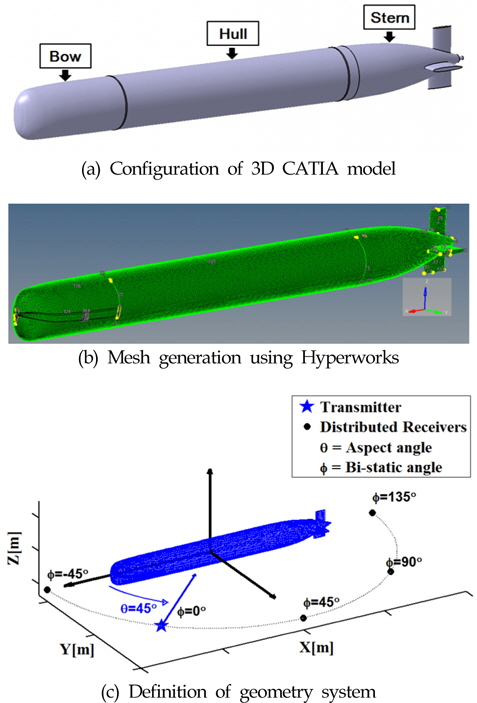
Pre-processing for target model
격자망 생성은 곡률(Curvature)을 갖는 연속된 면으로 구성된 표적모델의 외부표면을 유한개의 미소평면으로 재구성하는 과정으로 이때, 수치해석을 위한 이산 격자망은 각 미소평면의 격자 내 위상이 동일해야 한다는 가정이 적용된다. 이 가정은 해석주파수와 격자망의 상대적 크기에 따라 각각 요소에서 산란되는 음파들의 간섭에 의해 해석결과의 수렴성에 영향을 미치는 요소로(Clay and Medwin, 1977), 구형 표본표적을 이용한 음향산란영역(ka)에 대한 수치실험의 결과를 통해 확인된 바가있다(Choi et al., 2005). 따라서, 실제 표적형상의 곡률을 재현하기 위해 격자망의 형태는 삼각망요소와 사각망요소를 모두 사용하고, 국외 연구사례의 문헌자료(Schneider and Fiedler, 2003; Nolte, et al., 2007)를 통해 해석 격자망의 최대 허용크기를 해석주파수의 λ/6으로 결정하여 격자망을 생성하였다.
Fig. 5(c)는 표적격자모델과 3 차원 좌표축에 대한 표적자세각 (Aspect angle, 𝜽)과 송/수신기의 배치에 따른 양상태소나각 (Bi-static angle, 𝜙)의 기하학적 구조를 나타낸다. 표적자세각은 표적모델과 송신기의 상대적 배치상태를 의미하며, 표적모델이 정의된 3 차원 좌표축의 x축을 기준축으로 설정하여 이 축과 송신기가 이루는 각도로 정의한다. 양상태소나각은 공간상에 분리된 송신기와 개별 수신기의 사이각으로 정의한다. 따라서, 이 정의에 의하여 Fig. 5(c)는 표적격자모델에 대한 45°의 표적자세각 방향에 단일 송신기가 배치된 상태이며, 이 단일 송신기 주변으로 45°간격의 양상태소나각으로 각각의 수신기가 정의된 상태는 나타낸다. 만약, 송신기와 수신기가 동일한 위치에 정의되면 양상태소나각은 0°이 된다. 여기서, 표적자세각은 오른손 좌표계(Right-handed coordinate system)를 따르는 반시계 방향을 양의 (+)방향, 시계방향을 음의 (-)방향으로 정의한다.
2.5 가시영역 판별 알고리즘
Kirchhoff approximation은 음파가 직접적으로 입사되는 격자영역에 대한 산란음장의 적분을 수행하는 수치해석방법이므로, 표적상태와 다중 송/수신기의 배치에 따라 송신기로부터 표적표면에 입사된 음원신호를 수신기 방향으로 반사시키는 표면격자 즉, 가시영역(Visible surface)을 판별하는 알고리즘이 필수적으로 요구된다. 평판과 같이 단순한 형태의 표적모델과는 달리 수중의 3 차원 공간상 표적격자모델을 이용하여 가시영역 /비가시영역을 판별하는 경우, 표적 구조물 형상의 복잡도에 따라 그 구조물에 대해 효과적으로 음향학적 가시영역을 판별해야 하므로, Fig. 6와 같이 격자를 정의하고 후면제거법 (Backface removal)과 은면제거법(Hidden surface removal)의 알고리즘을 구현하여 최종 가시영역을 판별하였다.

Definition of surfaces
후면(Backface)이란, 송/수신기의 시점에서 보이지 않는 방향에 위치한 격자면으로 Fig. 6(a)의 a1, a2, a3와 같으며, 식 (8)의 내적을 이용하여 판별한다. 격자면의 방향성은 각 격자중심에 대해 표적의 외부방향으로 정의된 법선벡터로 표현되고, 이 법선벡터와 송/수신기에서 표적의 격자면 중심까지의 방향벡터의 내적이 “0”보다 작아 두 벡터의 사잇각이 90°이상이 되면 송/수신기의 시점에서 보이지 않는 반대방향의 격자면으로 판단되어 제거한다. 이때, Fig. 7(a)의 상단의 화살표로 표시된 바와 같이 내적만을 이용하는 후면제거법으로 제거되지 않는 격자영역이 존재한다. 여기서, 와
와  는 각각 송/수신기에서 격자면 중심까지의 방향벡터와 격자중심의 법선벡터이며, 단위벡터를 사용한다.
는 각각 송/수신기에서 격자면 중심까지의 방향벡터와 격자중심의 법선벡터이며, 단위벡터를 사용한다.
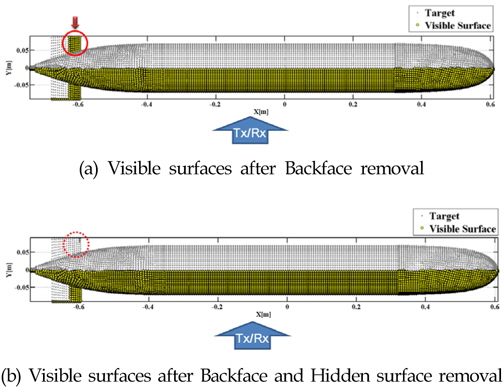
Determination of final visible surfaces

은면(Hidden surface)이란, 다른 구조물 격자면에 의해 가려지는 구조물 형상에 의한 음영구역으로 정의하며, 실제로 송신된 음원신호가 도달하지 못하여 산란음장의 형성에 기여하지 못하는 비 가시영역에 해당되는 영역이지만 후면제거법으로 제거되지 않는 영역으로 직선과 평면의 교점 방정식인 식 (9)를 이용하여 판별한다. 입력된 표적격자모델은 송/수신기의 시점 방향에서 후면을 제거한 후, 남은 격자들을 대상으로 은면의 여부를 탐색하게 되고 이 때, Fig. 6(b)와 같이 탐색대상이 되는 격자가 다른 구조물을 구성하는 격자면과 교점이 존재한다고 판단되면 해당 격자면은 비 가시영역인 은면으로 처리되어 최종 가시영역에서 제외된다. Fig. 7은 표적에 대해 -90°표적자세각의 동일한 위치에 송/수신기가 배치된 단상태 소나시스템의 경우, 후면과 은면의 정의에 따른 가시영역 판별의 단계적 과정을 나타낸다. 그러므로, Fig. 7(a)의 상단에서 제거되지 않았던 영역은 은면 처리 후, Fig. 7(b) 점선의 원으로 표시한 부분과 같이 비가시영역으로 제외된 것을 확인할 수 있으며, 이를 통해 최종 가시영역 판별알고리즘이 효과적으로 적용된 것을 알 수있다. 여기서, P는 직선과 평면의 교점좌표, Pa는 은면여부의 탐색 대상이 되는 격자의 중심좌표, Pa는 표적격자의 중심좌표, 는 송/수신기와 은면의 여부를 판별하는 격자 간의 시선방향 벡터(Line of sight),  는 표적격자 중심의 법선벡터이며, 단위 벡터(Unit vector)를 사용한다.
는 표적격자 중심의 법선벡터이며, 단위 벡터(Unit vector)를 사용한다.

Fig. 8은 0°표적자세각의 위치에 송신기(Tx)가 배치되고, Fig. 8(a)와 같이 송신기에 대해 양상태소나각(𝜙)을 45°로 하여 수신기(Rx)가 배치된 경우에 대한 가시영역 판별 결과를 나타내고 있다. Fig. 8(b)의 경우 Fig. 8(a)의 0°표적자세각(선수부)에 배치된 송신기의 방향에 대한 가시영역은 표적 길이방향의 대칭으로 존재하지만, 45°의 양상태소나각으로 송신기와 분리된 수신기 위치에 대한 가시영역을 재 판별하면 Fig. 8(c)와 같이 수신기의 반대방향의 영역은 후면 및 은면 처리된다. 따라서, 본 논문의 알고리즘은 기존의 단상태 소나시스템 뿐만 아니라 각각 송/수신기의 위치에 대한 가시영역과 비가시영역의 독립적인 탐색방법을 수행하여 송/수신기가 분리된 소나시스템에 대해기하학적 방법으로 최종적인 가시영역을 판별하였다.
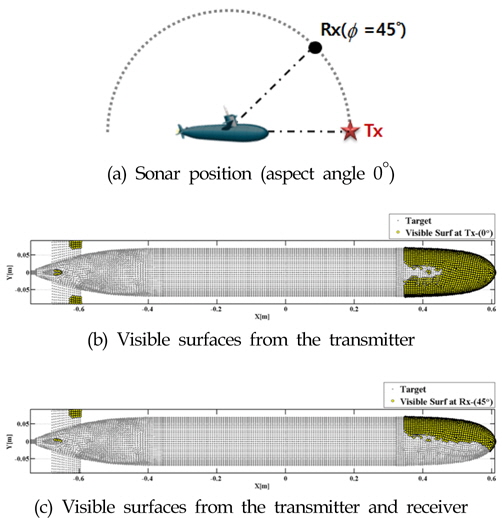
Visible surfaces according to the position transmitter and receiver
3. 다중상태 축소표적시험 자료
3.1 표적반향음 측정방법
Fig. 9는 선행논문(Bae et al., 2014)에 의해 구축된 다중상태 축소표적시험 시스템을 이용하여 12m(W)×18m(L)×10m(D) 규모의 음향수조에서 수행된 축소표적시험의 다중상태 표적반향음의 측정방법에 대한 모식도를 나타낸다. 소나시스템은 Fig.9(a)와 같이 1 채널의 단일 송신기와 16 채널의 수신기로 구성 되었으며, 송/수신기와 축소표적모델은 Fig. 9(b)와 같이 수조의 5m 수심 아래에 동일 축선 상에 배치되었다. 단일 송신기는 선수부 방향의 위치에 고정되었으며, 16 채널의 수신기는 축소표적모델을 중심으로 22.5°간격으로 배치되었다. Fig. 9(a)의 역 삼각형으로 표시된 영역에 포함되는 5 채널의 수신기에는 측정시스템의 기하학적 구조로 인해 송신기의 빔 특성에 의한 강한 직접파가 유기되며, 사용된 축소표적모델은 길이 1.4m, 지름 0.14m으로 Fig. 10의 형상과 같다.
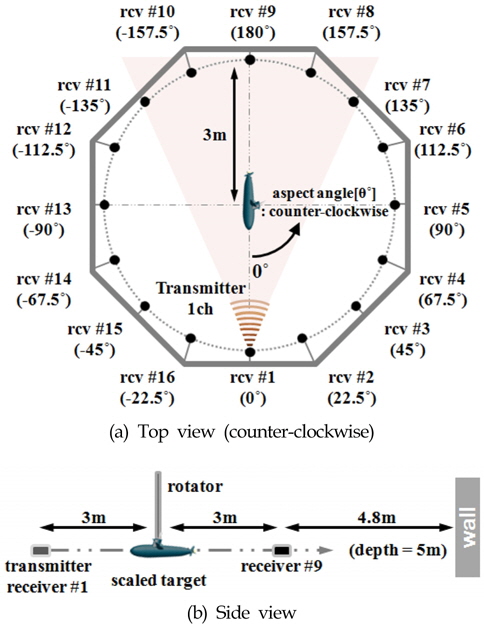
Experimental set-up using Multi-static system
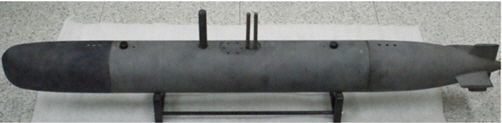
Scaled target model
3.2 측정데이터의 구성
본 논문에서는 축소표적시험에서 사용된 다양한 형태의 송신펄스 중 Table 2의 펄스형태를 사용하여 Fig. 10과 같은 외부형상을 갖는 축소표적모델에 대해 측정된 표적반향음의 시험자료를 이용한다. 1ms의 LFM(Linear frequency modulation) 송신펄스를 사용하여 측정된 시험자료로부터 소나방정식을 구성하는 음향변수 중, 표적에 대한 반사정도를 특징짓는 표적강도를 환산하여 구현된 다중상태 환경에 대한 표적반향음의 분포를 도출하고, 0.1ms의 CW(Continuous wave) 송신펄스를 사용하여 측정된 시험자료는 다중상태 환경의 표적반향음 모의결과와 비교하여 제안된 수치해석 모델링 방법을 검증한다.
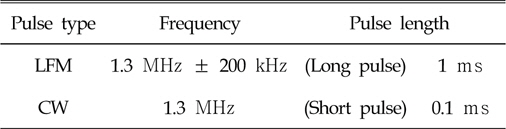
Transmitting pulse
3.3 다중상태 표적반향음의 특성
Fig. 11은 1ms의 LFM 송신펄스를 사용하여 16 채널의 모든 수신기에 기록된 다중상태 표적반향음을 나타내며, 표적의 대표반향점에서 반향된 신호들의 간섭효과에 의해 송신신호의 파형이 중첩된 형태로 기록되었다. 각 수신기에서 기록된 시계열 신호는 이해가 용이하도록 Fig. 9(a)의 수신기 위치에 대한 16개의 양상태소나각으로 표기하고, 해당하는 수신기 위치에서 기록된 시계열신호를 배치하여 하나의 평면상에 나타내었다. 각각의 시계열신호는 기록시간(x축)-표적자세각(y축)의 함수로 나타내었고, 표적자세각 변화에 따른 반향음의 수신특성이 잘 표현되도록 각 표적자세각에 대해 수신된 신호의 최대값을 이용하여 정규화 된 신호로 표현하였다.
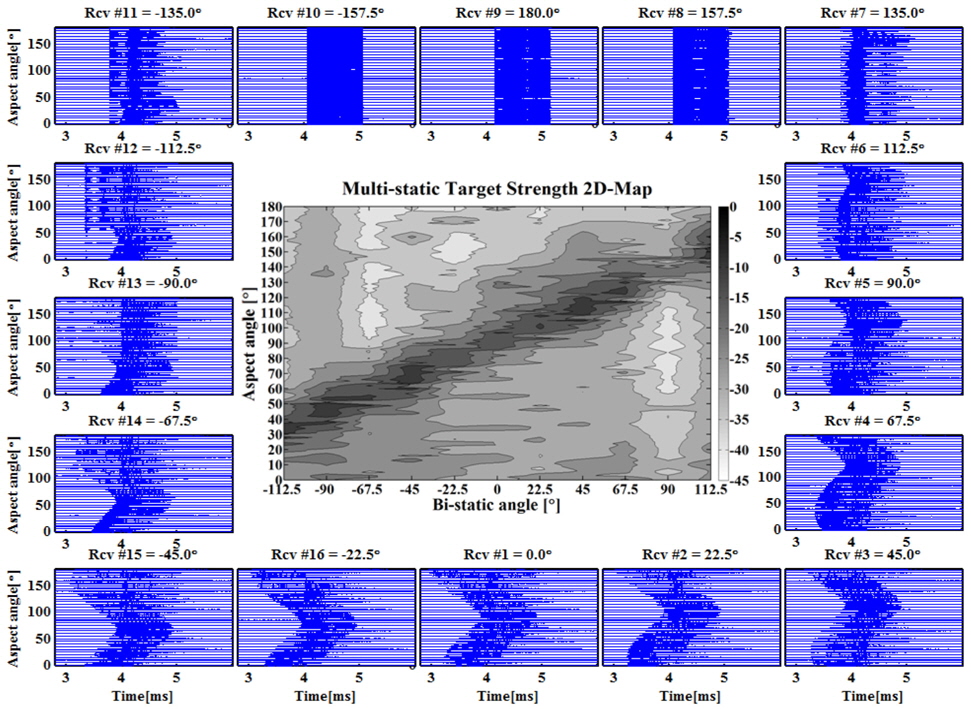
Measured data versus aspect angle and Bi-static angle using Multi-static measuring system
본 시험의 다중상태 환경은 송신기, 표적, 그리고 수신기가 동일 수심의 평면상에 대칭적으로 배치된 결과로 송신기의 빔패턴 특성에 의한 직접파가 수신기로 수신되는 것을 확인할 수 있으며, 송신기의 영향이 강하게 수신되는 수신기의 영역을 Fig. 9(a)에 나타내었다. 16 채널의 수신기 중, 양상태소나각이 ±135°/±157.5°/180°으로 분리된 수신기에는 4ms 부근의 수신시점에 송신기의 주엽(Main-lobe)에 의한 강한 신호가 기록되 었으며, 양상태소나각이 ±112.5°으로 분리된 수신기에는 3.4ms 수신시점에 송신기의 부엽(Side-lobe)에 의한 신호가 기록되었으나 상대적으로 표적반향음 보다 약하게 수신된 것을 관찰할 수 있었다.
16 채널의 수신기에서 기록된 시계열신호의 특징은 표적자세 각 변화와 송신기-표적-수신기의 구조적 배치에 의한 표적의 반향 위치/면적 변화에 따른 결과임을 알 수 있으며, 이러한 능동소나 시스템에서 수중표적에 대한 반향음의 특징은 식 (10)에 의한 표적강도로부터 결정된다. 사용된 음압준위(SL), 거리에 따른 전달손실(TL), 수신감도(RVS ), 그리고 수신이득(Gain)은 시스템에서 설계된 변수이므로, 표적강도는 순수한 표적상태에 의해 형성되는 반향음을 특징짓는 음향변수로 표현된다. 따라서, 다중상태 측정시스템을 활용한 음향수조시험으로 측정된 다중상태 표적반향음의 형성패턴을 나타내기 위해, 입사파와 반사파의 각 시간영역에 대한 평균 에너지의 비율로 계산되는 RTS(Root mean square target strength) 방법으로 표적강도를 환산하였다(Cook. 1985). Fig. 11의 중앙에 표현한 바와 같이 2차원 단면의 공간상 다중상태 표적강도를 양상태소나각(x축)과 표적자세각(y축)의 함수로 표현하였고, 이 때, 송신기에 의한 직접파의 영향이 강하게 나타는 수신기(𝜙=±135° /±157.5° /180°)를 제외한 11 개의 양상태소나각에 대한 결과를 나타내었다.

여기서, 가장 두드러진 특징은 표적몸체의 법선방향에 대한 송신신호의 입사각과 일치하는 반사각 방향에 위치한 수신기 위치에서 강한 거울면반사가 발생하며, 축소표적모델의 표적자세각이 0°~ 180°로 점차 변하면서 양상태소나각이 -112.5°인 위치의 수신기를 시작으로 양상태소나각이 +112.5°인 위치의 수신기 까지 표적강도의 분포가 변동하는 것을 알 수 있다. Fig. 11의 양상태 소나각이 0°인 경우는 단상태 환경에서 측정된 결과로 표적의 측면 방향(Broad-side)인 90°의 표적자세각에서 –10.9dB ~ -12.0dB의 강한 표적강도를 나타내고 있다. 다중상태 소나시스템을 구현하기 위해 배치된 15 채널의 각각 수신기 위치에서는 표적자세각과 수신기 방향성에 따라 다양한 표적강도 분포를 나타내며, 특히, 거울면반사가 발생되는 영역에서 –5.4dB ~ -8.5dB로 단상태 환경에 비해 높은 표적강도를 나타낸다.
따라서, 본 시험을 통해 단상태와 다중상태 소나시스템 환경에 대한 2 차원 단면의 공간상 표적강도를 도출하여 표적자세 각의 변화에 따른 반향음 분포특성을 용이하게 비교할 수 있었다. 분석결과로부터 수중표적에 대한 능동 표적탐지 시, 공간상에 분리된 다중 수신기를 활용하면 다양한 방향으로 형성되는 표적반향음에 대한 음향정보의 수집이 가능해지고, 이러한 음향정보의 활용은 단상태 환경에서는 제한적/부분적 이였던 탐지영역을 확장시켜 광범위한 표적탐지가 가능함을 실험적으로 확인하였다.
4. 시험자료를 통한 모델검증
구현된 다중상태 표적반향음 알고리즘을 검증하기 위해 축소 표적시험의 조건을 적용하여 Table 3의 (1), (2)의 다양한 소나 시스템 환경에 대한 축소표적모델의 표적반향음을 모의하여 시험자료와 비교하며, 각 구조물에 대한 반향특성을 비교하기 위해 0.1ms의 CW 송신신호를 사용하였다. 시험조건과 모의조건에 대한 음향산란영역은 물리광학 이상의 영역으로 외부형상에 대한 음향산란의 비교가 가능하다고 판단되어, 계산의 편이를 위하여 시험주파수 보다 낮은 주파수로 해석하였다. 시계열신호는 각 표적자세각에 따라 나타나는 반향신호의 최대값을 이용한 정규화를 통해 반향특성을 표현하였다.
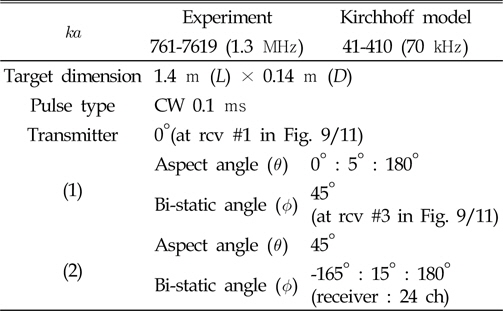
Comparison of experiment and modeling
4.1 양상태 소나시스템의 표적반향음 모의
축소표적시험 환경에서 Fig. 9(a)의 3 번 수신기 위치에 해당되는 Table 3(1)의 조건을 적용하여 1 채널의 단일 송신기와 45°의 양상태소나각으로 분리된 1 채널의 단일 수신기를 이용한 양상태 소나환경에서 표적자세각의 연속적인 변화에 의한 표적반향음의 시계열신호를 모의하여 시험자료와 비교하였다.
Fig. 12(a)는 송/수신기가 45°로 분리된 양상태 환경에서 기록된 시계열신호를 나타내며, 표적자세각과 축소표적모델의 외부 형상에 대한 다양한 반향위치에 따른 송/수신기 간의 거리변동에 의한 시간지연(Time-delay)으로 신호가 형성된다. Fig. 12(b)의 모의된 시계열신호에서도 송신기-표적-수신기의 배치와 표적자세각 변화로 인해 시험자료와 동일한 수신시점에서 외부형상에 대한 반향음 성분이 모의되는 것을 확인할 수 있다. 여기서, x축은 시간, y축은 표적자세각을 나타낸다.

Measured data and modeling result in Bi-static system (𝜙 = 45°)
Fig. 13과 Fig. 14는 표적 외부구조물의 형상에 의해 형성된 반향음을 비교하기 위해, 0°와 175°의 표적자세각에 대한 각각의 시험자료와 모의결과를 나타낸다. Fig. 13의 경우, 0°표적자세각 (Fig. 13(a))의 송신기에 대한 반향음 형성은 곡률반경이 큰 선수부에 의한 성분으로 Fig. 13(b)와 같이 송신펄스 형태와 유사한 반향성분이 측정되며, Fig. 13(c)의 모의결과에서도 이러한 특성이 잘 모사된 것을 알 수 있다. Fig. 14의 경우, 175°표적자세각 (Fig. 14(a))의 송신기에 대한 반향음 형성은 선미부(Rudder)에 의한 간섭현상으로 인해 송신신호로 사용된 펄스가 복잡한 구조물의 경계면에서 반향될 때 중첩되면서 펄스신장(Elongation)현상에 의해 송신펄스와 다른 형태의 반향음이 측정되며, Fig. 14(c)의 모의결과도 이산적으로 분할된 표적격자모델의 구조물 형상에 대한 간섭영향을 포함하는 반향음의 모의가 가능한 것을 알 수 있다. 여기서, Fig. 14(b)와 Fig. 14(c)의 표적반향음의 수신시점에 약 0.04ms의 차이는 시험수행 당시의 측정오차로 추정되지만, 시험자료와 비교결과 외부형상과 표적자세각에 의한 반향음의 전체적인 경향은 유사한 것으로 판단되었다.

Comparison of measured data and modeling result at the 0° aspect angle

Comparison of measured data and modeling result at the 175° aspect angle
4.2 다중상태 소나시스템의 반향음 모의
본 절에서는 Table 3(2)의 시험조건 및 송신기에 대해 축소표적모델이 45°로 고정된 표적자세각을 가정하여, 공간상에 분리된 다수의 수신기로 형성되는 다중상태 환경의 표적반향음을 모의하였다. 비교를 위한 측정자료는 1 채널의 단일 송신기와 8 채널의 수신기에 대한 결과를 이용하였으며, 모델링 결과는 시험조건과 동일한 위치에 1 채널의 단일 송신기를 배치하고 정의된 표적모델 주변으로 24 채널의 수신기를 배치하여 도출하였다. 시험자료의 경우, 축소표적시험에서 송신기에 대해 45°간격의 양상태소나각으로 수신기를 배치했기 때문에 수신기의 연속적인 위치변화에 대한 수신시점을 비교하기에 제약이 있다. 따라서, 모델링에서 정의된 15°간격의 양상태소나각으로 배치된 각각의 수신기 좌표정보와 시험배치에 의한 선수부와 선미부의 좌표정보를 이용하여 예측된 수신시점을 Fig. 15(a)와 같이 시계열신호와 비교하여 나타내었으며, 이를 이용하여 Fig. 15(b)의 24 채널의 수신기를 이용한 모델링 결과와 비교하였다. 여기서, x축은 기록시간, y축은 송신기에 대한 각 수신기 위치의 양상태소나각을 나타낸다.
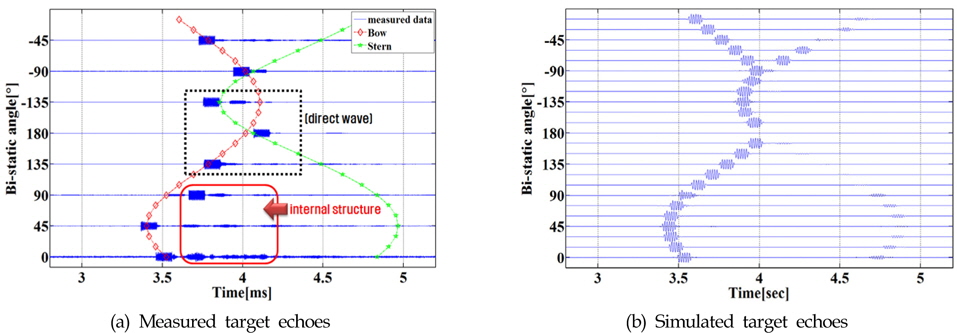
Measured data and modeling result in Multi-static system (aspect angle 𝜽 = 45°)
Fig. 15(a) 시험자료의 경우, 동일 수심에 송/수신기를 배치한 결과로 송신기의 반대편에 위치하는 ±135°/±157.5°/180° 양상태소나각의 수신기 위치에서는 송신기에 의한 강한 직접파가 수신된다. 또한, 8 채널의 수신기에 기록된 시계열신호의 특징중, 0°/45°/90°의 양상태소나각에 위치한 수신기에는 선수부 내부구조물에 의한 반향성분이 수신되는 것을 확인할 수 있으며, 이는 축소표적시험에 사용된 축소표적모델의 선수부는 이중구조로 설계되어 반원형태의 내부 선수부가 부착된 결과로 추정된다.
Fig. 15(b)는 표적의 외부형상을 고려한 수치모델링 결과를 나타내며, Fig. 15(a)의 송신기의 직접파와 내부구조물에 의한 신호성분을 제외한 반향특성의 특징으로 외부형상에 대해 유효한 결과의 다중상태 표적반향음이 모의되는 것을 확인할 수 있다. 여기서, Fig. 15(b)에서 수신기가 180°의 양상태소나각으로 분리된 경우, 수신기는 송신기에 대한 맞은편에 위치하므로 정의된 표적모델에 대한 기하학적 가시영역이 존재하지 않아 시계열신호가 모의되지 않는데, 이는 제안된 해석기법의 한계점을 보여준다. 또한, 제안된 해석기법은 표적에 대한 내부구조물 효과를 고려하지 않았기 때문에 내부형상에 의한 신호를 재현하지 못하는 제약은 있으나, 표적의 외부형상에 대해 의미있는 반향특성이 형성됨을 확인하였다.
4.3 다중상태 표적강도 자료의 구축
축소표적시험에서 획득된 시험자료와 동일한 음향조건에서의 수치모델링 결과를 비교하여 Kirchhoff approximation을 적용한 다중상태 표적반향음 모델링 알고리즘을 검증하였다. Fig. 16은 구현된 알고리즘을 이용하여 도출된 축소표적모델의 대표적인 표적자세각 0°/45°/90°에 대한 다중상태 표적강도의 분포를 도시하였다. 다중상태 소나환경은 단일 송신기의 위치와 시험분석에서 송신기의 직접파 영향이 강한 5 채널의 수신기를 제외한 11 채널의 수신기 위치정보를 이용하였다. Fig. 16의 모델링 결과는 각각의 표적자세각에 대해 거울면반사가 유효하게 발생하는 수신기의 방향으로 강한 표적강도가 나타남을 확인할 수 있으며, 이는 선행논문(Bae et al., 2014 submitted)에서 분석된 다중상태 표적강도의 분포 및 방향성과 일치함을 확인할 수 있다. 여기서, 도형  은 단일 송신기의 위치, 도형
은 단일 송신기의 위치, 도형  은 Fig. 11의 x축에 표시된 양상태소나각 ±112.5/±135/±157.5/180°의 11 채널 수신기의 위치를 나타낸다.
은 Fig. 11의 x축에 표시된 양상태소나각 ±112.5/±135/±157.5/180°의 11 채널 수신기의 위치를 나타낸다.
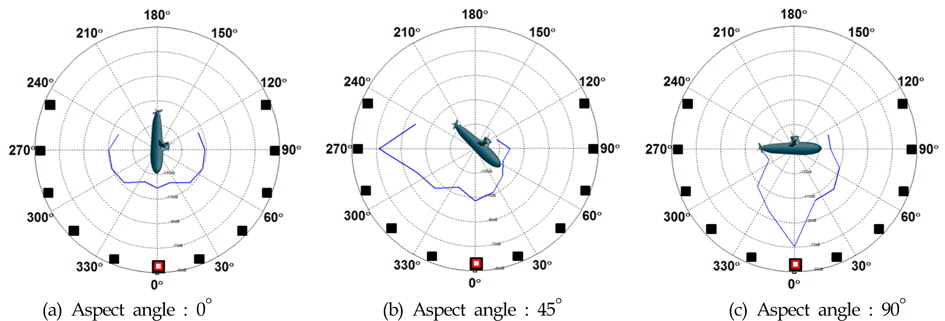
2-Dimensional target strength calculated from numerical model
다중상태 소나시스템의 탐지개념은 동일 평면상의 2 차원 배치뿐만 아니라, 송/수신기와 표적의 수평/수직 방향에 대한 3 차원 배치를 포함하는 방식이므로, 구조적 해석을 위해서는 표적과 송/수신기의 3 차원 배치에 대한 표적강도의 예측이 필요하다. 따라서, 수치모델링을 통해 Fig. 17과 같이 정의된 표적에 대해 모든 공간상에 수신기를 배치하여 표적과 송신기의 수심변화에 대해 예측된 3 차원의 표적강도 모델을 구축하였다. 송신기와 표적의 심도변화는 Fig. 17(a)의 경우 송신기는 표적의 0°자세각(선수부) 방향에 동일한 심도에 위치한 결과이고, Fig. 17(b)의 경우 표적의 0°자세각(선수부) 방향에 표적보다 아래 심도에 위치한 결과이다. 3 차원의 표적강도 모델로부터 송신기와 표적, 그리고 표적과 수신기의 물리적 배치에 따라 표적강도의 분포가 상이한 것을 알 수 있으며, 이는 효율적인 송/수신기의 배치 또는 능동소나의 성능 분석을 위한 시뮬레이터의 음향모델로 활용성이 클 것으로 판단된다.
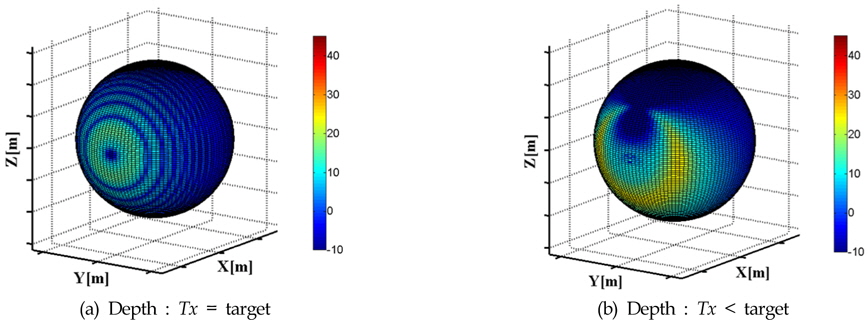
3-Dimensional target strength model calculated from numerical model
4.4 모델 예측자료의 활용성
축소표적모델 음향수조시험 자료의 분석을 통해 동일한 표적상태에 대한 송/수신기의 공간상 위치에 따른 2 차원 평면상 표적강도의 다양한 분포변화를 결과로 도출함으로써, 다중상태로 확장된 능동소나 표적반향음 예측을 위한 알고리즘 구현의 필요성을 확인할 수 있었다. 따라서, 기존에는 다중상태 소나시스템에 대한 표적탐지 성능분석을 위해 사용된 음향모델로는 단상태 표적강도 모델로부터 추정된 양상태 표적강도 모델을 사용한다고 알려져 있으나(Urick, 1983; Jang et al., 2006), 본 논문에서 구현된 3 차원의 다중상태 능동소나 표적반향음 알고리즘의 활용을 통해 신뢰성 있는 결과의 도출이 가능할 것으로 판단된다.
Fig. 18은 구현된 다중상태 표적반향음 모의 알고리즘을 수행하여 예측된 2 차원 평면상 표적강도 분포양상을 나타내고 있다. 사용된 표적은 길이 50m의 실린더 형상이고, 수신기는 동일한 수심에 [33×33]의 격자형태로 공간상에 배치하였으며, 심도는 표적<송신기<수신기 순서로 가정하였다. 이때, 송신기를 표적에 대해 0°/30°/90°표적자세각의 위치로 변화시키면서 다중수신기 위치에 대한 2 차원 평면상 표적강도를 이미지로 표현 하였다(Ji et al., 2013).
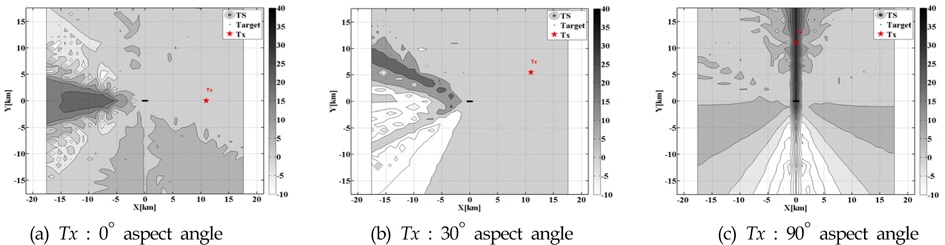
Prediction for Multi-static 2D target strength according to transmitter position in space
세 가지 송신기 위치에 대한 예측결과는 표적의 법선방향에 대해 입사각과 반사각이 같아지는 거울면반사가 발생되는 수신기의 영역으로 강한 표적강도가 형성되는 것을 확인할 수 있었다. 표적에 대해 0°/30° 표적자세각의 위치에 배치된 송신기의 경우는 공간상 반대방향에 위치한 수신기로 강한 반향음이 형성될 것으로 예측되며, 90° 표적자세각의 위치에 배치된 송신기의 경우는 표적의 Broad-side에 위치하므로 송신기 방향에 위치한 수신기 영역에 강한 반향음이 형성되는 것을 예측할 수 있다. 이는 음향수조시험을 통한 Fig. 14의 표적강도 분포양상과 일치하는 경향을 보여줌으로써, 주어진 다중상태 소나시스템과 표적의 상대적 구조에 대한 표적반향음의 공간적 분포예측을 통해 수중표적에 대한 탐지가능성의 근거로 활용이 가능함을 보여준다.
5. 결 론
공간상 다수의 송/수신기에 의한 수중표적의 능동소나 반향음은 각 요소들의 구조적 배치, 표적형상, 그리고 표적자세각에 따른 기여도에 따라 각 수신기의 위치로 반향되는 신호특성이 달라진다. 따라서, 본 논문은 다수의 송/수신기를 공간상에 배치할 수 있도록 다중상태 소나시스템으로 확장하고, 3 차원 외부형상에 의한 표적격자모델을 이용하여 각 표적표면에서 입사/반사되어 형성되는 음장적분을 수행하는 Kirchhoff approximation을 적용한 고주파수 수치해석 기반의 다중상태 표적반향음 모델링 방법을 제안하였다.
제안된 알고리즘은 축소표적모델을 이용한 음향수조시험을 통해 측정된 시계열신호를 이용하여 단일 송/수신기로 배치된 양상태 시스템과 단일 송신기와 다수의 수신기로 배치된 다중상태 시스템에 대해 축소표적모델의 표적자세각 변화에 따른 신호특성을 비교하였다. 이를 통해 본 논문에서 제안하는 수치해석 방법은 표적의 외부형상에 대한 유효한 모의결과를 도출하는 것을 확인하였으며, 시험자료 분석을 통해 도출된 2 차원 평면상 다중상태 표적강도를 통해 기존이 단상태 소나시스템에 비해 다중상태 소나시스템의 활용성을 실험적으로 확인하였다. 또한, 임의의 송/수신기와 표적에 대한 다중상태 표적강도 예측결과를 이미지맵으로 가시화하여 본 논문의 알고리즘 활용성을 제시하였다.
하지만, 실제 표적반향음은 외부구조물 뿐만 아니라, 내부구조물에 의한 신호성분을 포함하므로 추후 내부구조물에 대한영향을 효과적으로 적용하기 위한 연구가 추가적으로 필요하다고 사료된다.
Acknowledgements
본 연구는 국방과학연구소[천해 수중 분산센서망의 표적 능/수동 신호 모델 개발(UD120002DD), 실시간 음향신호처리 구현 및 탐지 융합 알고리즘 연구(UD130003DD)]의 지원으로 수행되었습니다.
References
Bae, H.S., Ji, Y.H., Kim, W.J., Kim, W.S., Kim, J.S., Yun, S.U., 2014. Inverstigation of Target Echoes in Multi-static SONAR System - Part I : Design for Acoustic Measuring System. Journal of Ocean Engineering and Technology, 28(5), 429-439.
Bae H.S., Ji Y.H., Kim W.J., Kim W.S., Kim J.S., Yun S.U.. Inverstigation of Target Echoes in Multi-static SONAR System - Part I : Design for Acoustic Measuring System. Journal of Ocean Engineering and Technology 2014;28(5):429–439.Bae, H.S., Kim, W.J., Kim, W.S., Choi, S.M., 2013. Energy Distribution Characteristics of the Target Signals using the Underwater Distributed Sensor Networks. Proceedings of The Korea Institute of Military Science and Technology, 779-780.
Bae H.S., Kim W.J., Kim W.S., Choi S.M.. Energy Distribution Characteristics of the Target Signals using the Underwater Distributed Sensor Networks In : Proceedings of The Korea Institute of Military Science and Technology; 2013. p. 779–780.Choi, Y.H., Shin. K.C., You, J.S., Kim, J.S., Joo, W.H., Kim. Y.H., Park, J.H., Choi, S.M., Kim, W.S., 2005. Numerical Modeling and Experimental Verification for Ttarget Strength of Submerged Objects. Journal of Ocean Engineering and Technology, 19(1), 64-70.
Choi Y.H., Shin K.C., You J.S., Kim J.S., Joo W.H., Kim Y.H., Park J.H., Choi S.M., Kim W.S.. Numerical Modeling and Experimental Verification for Ttarget Strength of Submerged Objects. Journal of Ocean Engineering and Technology 2005;19(1):64–70.Clay, C.S., and Medwin, H., 1977. Acoustical Oceanography: Principles and applications. John Wiley & Sons, Inc.
Clay C.S., Medwin H.. Acoustical Oceanography: Principles and applications John Wiley & Sons, Inc.; 1977.Cook, J.C., 1985. Target Strength and Echo Structure. Adaptive Methods in Underwater Acoustics. NATO ASI Series, 151, 155-172.
Cook J.C.. Target Strength and Echo Structure. Adaptive Methods in Underwater Acoustics. NATO ASI Series 1985;151:155–172.Hazen, M.G., Drumheller, D.M., Gilroy, L.E., 2002. Modeling Second order Target Strength Effects at Physical Optics Integral Frequencies. Proceedings of Undersea Defence Technology Conference Europe, PIII-25.
Hazen M.G., Drumheller D.M., Gilroy L.E.. Modeling Second order Target Strength Effects at Physical Optics Integral Frequencies, PIII-25 In : Proceedings of Undersea Defence Technology Conference Europe; 2002.Jang, J.H., Ku, B.H., Hong, W.Y., Kim, I.I., Ko, H.S., 2006. The Effectiveness Analysis of Multistatic Sonar Network Via Detection Performance. Journal of the Korea Institute of Military Science and Technology, 9(1), 24-32.
Jang J.H., Ku B.H., Hong W.Y., Kim I.I., Ko H.S.. The Effectiveness Analysis of Multistatic Sonar Network Via Detection Performance. Journal of the Korea Institute of Military Science and Technology 2006;9(1):24–32.Ji, Y.H., Byun, G.H., Kim, J.S., Bae, H.S., Kim, W.S., 2013. Multi-static Scattering Characteristics of Submerged Objects with Experimental Investigation. Journal of the Acoustical Society of America, 134, 4113.
Ji Y.H., Byun G.H., Kim J.S., Bae H.S., Kim W.S.. Multi-static Scattering Characteristics of Submerged Objects with Experimental Investigation. Journal of the Acoustical Society of America 2013;134:4113.Kim, B.I., Park, M.H., Kwon, W.H., 2001. Echo Signal synthesis of Underwater Target by Distributed Highlight Model. Journal of the Acoustical Society of Korea, 19(7), 15-22.
Kim B.I., Park M.H., Kwon W.H.. Echo Signal Synthesis of Underwater Target by Distributed Highlight Model. The Journal of the Acoustical Society of Korea 2001;19(7):15–22.Kim, H.S., Shin, K.C., Kim, W.S., Han, D.H., Choi, S.M., Kim, J.S., 1997. Realtime Active Target Signal Simulation. Journal of the Acoustical Society of Korea, 11(3), 163-169.
Kim H.S., Shin K.C., Kim W.S., Han D.H., Choi S.M., Kim J.S.. Realtime active target signal simulation. Journal of Ocean Engineering and Technology 1997;11(3):163–169.Kim, K.H., Cho, D.S., Seong, W.J., 2008. Simulation of Time-Domain Acoustic Wave Signals Backscattered from Underwater Targets. Journal of the Acoustical Society of Korea, 27(3), 140-148.
Kim K.H., Cho D.S., Seong W.J.. Simulation of Time-Domain Acoustic Wave Signals Backscattered from Underwater Targets. The Journal of the Acoustical Society of Korea 2008;27(3):140–148.Kim, K.J., Hong, S.Y., Kwon, H.W., 2007. Derivation of Acoustic Target Strength Equation Considering Pulse Type of Acoustic signal. Proceedings of the Korean Society for Noise and Vibration Engineering, KSNVE07A-29-03.
Kim K.J., Hong S.Y., Kwon H.W.. Derivation of Acoustic Target Strength Equation Considering Pulse Type of Acoustic Signal. KSNVE07A-29-03 In : Proceedings of the Korean Society for Noise and Vibration Engineering; 2007.Kim, S.H., You, S.K., Choi, J.W., Kang, D.H., Park, J.S., Lee, D.J., Park, K.J., 2013. Target Signal Simulation in Synthetic Underwater Environment for Performance Analysis of Monostatic Active Sonar. Journal of the Acoustical Society of Korea, 32(6), 455-471.
Kim S.H., You S.K., Choi J.W., Kang D.H., Park J.S., Lee D.J., Park K.J.. Target Signal Simulation in Synthetic Underwater Environment for Performance Analysis of Monostatic Active Sonar. The Journal of the Acoustical Society of Korea 2013;32(6):455–471. 10.7776/ASK.2013.32.6.455.Kwon, H.W., Hong, S.Y., Kim. H.M., Jeon, J.J., Kim. J.H., 2011. Developement of Acoustic Target Strength Analysis Software Considering Anechoic Coating Effect. Proceedings of the Acoustical Society of Korea, 30(1), 770-775.
Kwon H.W., Hong S.Y., Kim H.M., Jeon J.J., Kim J.H.. Developement of Acoustic Target Strength Analysis Software Considering Anechoic Coating Effect In : Proceedings of the Acoustical Society of Korea; 2011. 30(1)p. 770–775.Lee, T.K., 2005. Acoustic Target Strength Predictions for the Submerged Structures with Stiffener Effects and Multiple-Bounce Contributions. M.S. thesis, Seoul National Univ.
Lee T.K.. Acoustic Target Strength Predictions for the Submerged Structures with Stiffener Effects and Multiple-Bounce Contributions.M.S. thesis Seoul National Univ.; 2005.Lew, H., 2004. Broadband Echoes from Underwater Targets. International Journal of Computational Engineering Science(IJCES), 5(2), 281-290.
Lew H.. Broadband Echoes from Underwater Targets. International Journal of Computational Engineering Science(IJCES) 2004;5(2):281–290.Maxit, L., Oudot, J., Audoly, C., 2004. Target Strength Modeling of Submarines. Proceedings of Undersea Defence Technology Conference Europe, 7B-3.
Maxit L., Oudot J., Audoly C.. Target Strength Modeling of Submarines, 7B-3 In : Proceedings of Undersea Defence Technology Conference Europe; 2004.Nguyen, B., Lew, H., 2002. Broadband BISTATIC Acoustic Scattering of Submerged Objects. Proceedings of Undersea Defence Technology Conference Asia, PI-6.
Nguyen B., Lew H.. Broadband BISTATIC Acoustic Scattering of Submerged Objects, PI-6 In : Proceedings of Undersea Defence Technology Conference Asia; 2002.Nolte, B., Schafer, I. Ehrlich, J., Ochman, M., Burgschweiger, R., Marburg, S., 2007. Numerical Methods for Wave Scattering Phenomena by Means of Different Boundary Integral Formulations, Journal of Computational Acoustics, 15(4), 495-529.
Nolte B., Schafer I, Ehrlich J., Ochman M., Burgschweiger R., Marburg S.. Numerical Methods for Wave Scattering Phenomena by Means of Different Boundary Integral Formulations. Journal of Computational Acoustics 2007;15(4):495–529.Schneider, H.G., Friedler, C., 2003. Benchmark Target Strength Simulation Workshop. Proceedings of Undersea Defence Technology Conference Europe, 9B-1.
Schneider H.G., Friedler C.. Benchmark Target Strength Simulation Workshop, 9B-1 In : Proceedings of Undersea Defence Technology Conference Europe; 2003.Seong, N.J., Kim, J.S., Lee, S.Y., Kim, K., 1994. MOving Spread Target Signal Simulation. Journal of the Acoustical Society of Korea, 13(2), 30-37.
Seong N.J., Kim J.S., Lee S.Y., Kim K.. MOving Spread Target signal simulation. Journal of the Acoustical Society of Korea 1994;13(2):30–37.Shin, K.C., Park, J.E., Kim, J.S., Choi, S.M., Kim, W.S., 2001. Target Scattering Echo Simulation for Active Sonar System in the Geometric Optics Region. Journal of the Acoustical Society of Korea, 20(3), 95-101.
Shin K.C., Park J.E., Kim J.S., Choi S.M., Kim W.S.. Target Scattering Echo Simulation for Active Sonar System in the Geometric Optics Region. Journal of the Acoustical Society of Korea 2001;20(3):95–101.Urick, R.J., 1983. Principles of Underwater Sound. 3rd Edition, McGraw-Hill, New York.
Urick R.J.. Principles of Underwater Sound 3rd Editionth ed. McGraw-Hill. New York: 1983.You, S.K., Kim, S.H., Choi, J.W., Kang, D.H., Jeong, D.M., 2014. Modeling and Experimental Verification of Echo Characteristics of 3 Dimensional Underwater Target. Journal of the Acoustical Society of Korea, 33(3), 174-183.
You S.K., Kim S.H., Choi J.W., Kang D.H., Jeong D.M.. Modeling and Experimental Verification of Echo Characteristics of 3 Dimensional Underwater Target. Journal of the Acoustical Society of Korea 2014;33(3):174–183. 10.7776/ASK.2014.33.3.174.