


1. 서 론
최근 조선소에서는 해양 구조물의 수주가 활발히 진행되고 있으며, Yard내에서의 건조뿐 만 아니라, Offshore site에서의 설치에 대한 책임까지 맡게 되는 EPCI(Engineerng, procurement, construction and installation)공사로 전환되어져 공사를 수행하고 있다. 설치 공사(Installation)는 해양 구조물의 Type 및 그 규모에 따라 여러 형태의 공법이 존재하며(Chakrabarti, 2005; Gerwick, 2007), 이 중에서 Floating crane에 의한 Lifting 공법 및 Heavy lift vessel에 의한 Mating 공법에 대한 동적 하중의 연구는 기 수행되어진 바 있다(Lee, 2011; Lee et al., 2013).
아울러, 해양 구조물의 Type에 따라서 설치 공사의 기본 개념이 상이해 지는데, 대표적인 예로 해저 드릴링을 위해 해상 Site에서 DPS(Dynamic positioning system)로 위치 유지 및 이동성을 확보하는 Semi-rig는 해저 계류 Line과의 연결을 위한 설치 작업시 DPS를 활용하여 보다 효율적이고 용이하게 작업이 가능하다. 하지만, 해저 생산용으로 활용되는 FPSO(Floating production storage and offloading), Semi-FPU 등은 운용 해역에서 영구적으로 위치하기 때문에 일반적으로 별도의 DPS 기능이 없으며, 해저 계류 Line과의 연 결 설치 작업을 위해서는 해양 구조물의 위치 유지가 필요하며, 일반적으로 Tug에 의한 위치 유지를 고려하여야 한다(Hancox, 2011).
Tug는 해양 구조물의 Towing을 위한 특수 선박으로 그 용량은 내해 및 외해 운용에 따라서 차이가 발생한다. Onshore용으로는 100ton 미만의 용량을 가지는 반면에 Offshore용으로는 200ton을 전후한 용량을 확보한다(Hancox, 1997). 통상, 해상에서 설치 공사용 위치 유지를 위한 Tug는 Yard에서부터 Wet towing으로 이용한 동일 Tug를 사용하는 것이 일반적이다.
해상 설치 작업시 해양구조물의 허용 범위 내에서 위치 유지를 가능하게 하는 Tug 용량 및 척수의 확보는 해상 기상 및 주위 간섭물의 충돌에 따른 사고 위험에 대비하기 위한 중요한 사항이다. Tug 용량 산정을 위해 고려해야 할 파라메터로서는 설치 작업시 주어진 흘수 상태에서, 바람, 파도 및 조류의 해상기상에 따라 해양구조물에 가해지는 환경 외력, Tug line의 연결 지점, Tug line 길이 및 특성치 등이 있다. 본 논문에서는 Tug line의 특성 및 길이 변화에 따른 Line 동하중 및 해양 구조물의 평면 운동(Planar motion)을 검토하였다. 이러한 결과를 토대로 적정한 Tug의 용량을 산정할 수 있으며, 위치 유지시 해양구조물이 허용된 변위 범위내에 있는지 검토 가능하다.
2. 위치 유지(Position Keeping) 일반 사항
DPS가 없는 해양 구조물의 경우, 해상에 기 설치되어져 있는 계류 Line과의 연결 작업을 위해서는 Tug에 의한 위치 유지가 필요하다. 그림 1에 보는 바와 같이, Semi type의 해양 구조물의 설치 작업을 위해서는 통상 4척의 Tug가 외곽 컬럼의 모서리 상단에 Line을 연결하여 위치 유지를 한다.

Tug에 의한 위치 유지를 위한 일반 사항으로 우선, 설치 해역에 따른 사용 Tug의 척수 및 용량이 상이하며 이를 만족하는 해역별 기상 한계치(Weather criteria)가 결정된다. 설치 공사를 위한 기상 정보는 1년 Storm 조건을 적용하는 것이 일반적이며, West Africa 및 Brazil 등 온화한 기상을 가지는 해역이 있는 반면, West Australia, North Sea 등은 설치를 위한 적정 기상 조건(Weather window)에 높은 위험 인자(High contingency factor)를 고려해야 할 정도로 기상 조건이 열악하다.
Tug에 의한 위치 유지를 위해서 고려해야 할 또 다른 항목으로 Tug의 가용 범위이다. 이는 해저 계류 Line 연결용 설치선 및 해양 구조물 외곽의 돌출물과의 간섭이 일어나지 않도록 범위를 정한다. 이러한 영향으로 가용 범위가 줄어들 경우, 전 방향의 환경 외력에 견딜 수 있는 Tug 용량은 감소하게 된다.
Tug line 연결을 위한 Lug 등과 같은 철의장류(Outfitting) 관점에서도 여러 사항을 고려해야 한다. 예를 들면, 해양구조물에 설치되어져 있는 철의장류의 안전율이 Rule을 만족하는지 검토되어져야 하며, 철의장류에 Tug line의 연결 및 해체를 어떻게 해야 하는지도 충분히 검토되어져야 한다. 아울러, Tug line의 길이 및 특성치는 환경 외력에 의한 Line 동하중이 허용 하중을 초과하지 않도록 결정되어져야 한다.
기타, 고려해야 될 항목으로는 해저 계류 Line 연결 작업을 하는 동안에 해양구조물에 설치되어져 있는 다수 Fairlead간의 충돌 및 해저에 설치된 계류 Line간의 접촉을 막기 위한 해양구조물의 허용 변위이며, Tug 용량은 전방위에서 이 허용 변위를 만족하도록 결정되어져야 한다.
Tug 용량 및 척수 그리고 Tug line을 포함한 철의장 설계는 상기의 일반 사항을 신중히 검토하여 안전하게 정해져야 할 것이다.
3. 주요 파라메터
상기 1절 및 2절 내용을 토대로 Tug의 주요 파라메터를 열거하면, 우선 본 연구에서 가정한 불변하는 파라메터로서는 해양구조물의 흘수, 배수량, 무게 중심과 같은 유체정역학적 관점 (Hydrostatic)에서의 데이터, 해역의 기상 한계치(Weather criteria) 및 해양구조물의 Tug line 연결 지점에 의한 Line 각도이다. 반면에, 가변적인 파라메터로 가정된 항목으로는 Line 길이 및 특성치가 있다. 이러한 파라메터를 통해서 계산에 의해 도출되는 결과물로서는 환경 외력, 해양구조물의 평면 운동 및 Tug line의 동하중이다. 그림 2는 Tug에 의한 위치 유지 배치도를 나타내고 있으며, 대상 해양 구조물은 Ichthys CPF (Central processing facility)이다.

그림 3은 Tug line 길이 변화에 따른 Tug 위치 유지 Line 배치도의 Plan view를 나타낸다. Line 길이는 50m에서 300m까지의 변화를 주었으며, 특성치는 Wire 및 Wire에 일정한 길이의 Nylon을 추가하는 Nylon tail rope의 2 종류를 고려했다. Table 1에서 보는 바와 같이 가변 파라메터의 내용을 정리하였다.
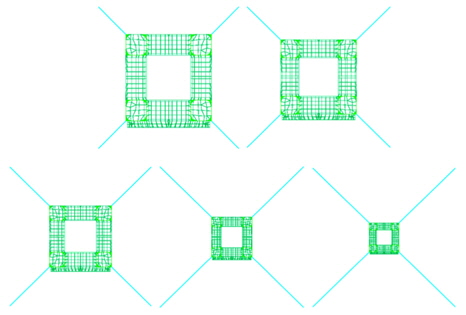

Wire 및 Nylon의 특성치는 Table 2에 나타내었으며, MBL(Minimum breaking load)이 비슷한 사양으로 결정하였다.

4. 파도, 바람 및 조류의 환경 하중 특성
본 절에서는 기상 한계치(Weather criteria)에 따른 환경 외력을 검토하였다. 그림 4는 해석을 위한 좌표 원점 및 환경 외력의 방향을 나타내며, 우수계로 좌표 원점은 CPF의 북쪽 선저중앙이다. 바람, 파도 및 조류는 CPF의 동쪽에서 0도로 입사하는 기준으로 반시계 방향으로 증가한다.
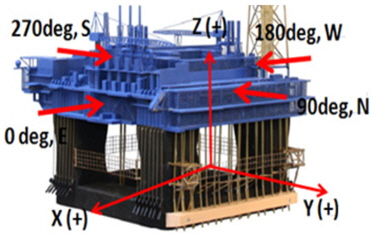
Table 3은 Position keeping 해석을 위한 1년 Storm 조건을 나타낸다. 본 환경 조건하에서 설치선을 이용한 해저 계류 Line 연결 작업은 불가능하다. 하지만, 설치 해역에서 예상되는 가장 높은 환경 조건으로서, Tug에 의한 Position keeping 능력은 확보되어야 한다.

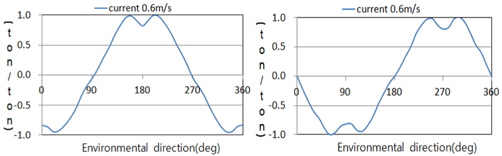
그림 5에서부터 그림 7은 각 환경 조건에 의한 외력을 전 입사 각도별로 나타내었다. 그림 좌측은 x방향 성분의 환경 외력이며, 그림 우측은 y방향 성분의 환경 외력이다. 우선 Wave에 의한 환경 외력은 상용 프로그램을 활용하여 평균 파표류력(Mean drift force)를 계산하여 나타내었다. 바람 및 조류에 의한 환경 외력은 풍동 실험에 의해 계측되어진 계수값을 이용하여 산정되어졌으며 각 환경 외력의 최대값으로 무차원화하였다. 본 그림을 통해, 최대 환경 외력이 발생하는 방향각을 알 수 있으며, 그림 8은 모든 환경 외력을 합산하여 방향별로 표시를 하였다. 그림에서 알 수 있듯이, 해양 구조물의 정방향보다는 경사 방향에서 환경 외력이 크게 작용함을 파악할 수 있으며, 이 결과를 참고로 하여 Tug의 위치는 해양 구조물 각 컬럼의 모서리에 위치하는 것이 유리하다고 판단된다.



5. Line 동하중 및 평면 운동 계산 결과
본 절에서는 Tug의 Line 특성(Wire 와 Nylon tail rope) 및 길이 변화에 따른 계산 결과를 정리하였다. 계산은 해양 구조물 거동에 관한 범용 프로그램인 MOSES를 이용하였다(Nachlinger, 2013). 결과는 해양 구조물의 평면 운동 및 Tug line에 작용하는 하중이며, 모든 값들은 각 최대값을 1로 해서 무차원화 하였다. 그림 9에서부터 그림 11은 Line 길이 50m에 해당하는 Line 특성에 따른 Surge, Sway 및 Yaw의 평면 운동을 환경 외력 방향별로 정리하였다. 그림에서 보는 바와 같이 Surge 및 Sway운동은 각 모드 방향에서 가장 큰 운동이 발생함을 알 수 있으며, Nylon tail rope에 의한 운동이 Wire에 비해 약간 크게 발생한다. 이는 Wire에 비해 Nylon tail rope에 의한 Line 변형량이 증가되어 나타나는 현상으로 파악된다.
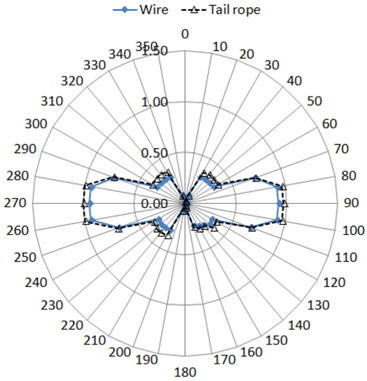
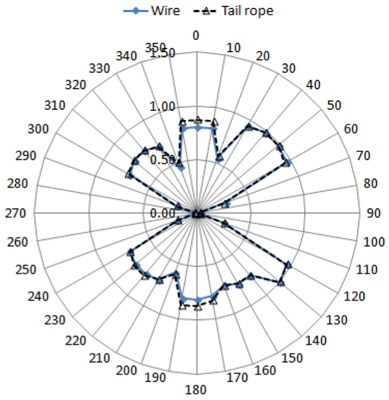
Yaw 운동은 Sway 방향에서는 발생하지 않으며, 경사 방향 및 Surge 방향에서 그 값을 가짐을 알 수 있다. Surge 방향에서 Yaw가 발생함은 수면 하부에 위치해 있는 폰툰의 한쪽 외측에 라이저 가이드 구조물이 설치되어져서 기하학적인 비대칭성에 의한 영향으로 파악된다.
그림 12에서부터 그림 14까지는 Tug Line 특성에 따른 Line 길이별 평면 운동 결과를 나타내며, 모든 값들은 최대값을 1로 해서 무차원화 하였다. Surge 및 Sway 운동의 경우, Wire 및 Nylon tail rope 특성에 따라서, 100m Line 길이까지는 평면 운동의 차가 거의 없으며, 200m와 300m에서는 짧은 Line에 비해 운동이 증가함을 알 수 있다. 또한, Nylon tail rope의 경우가 Wire에 비해 운동이 크게 나타나며, 이는 앞서 설명한 바와 같이 Line 특성치의 변형량에 따른 결과로 판단된다.
Yaw 운동은 Surge 및 Sway 운동 특성과는 달리, Line 특성에 큰 영향을 받지 않음을 알 수 있으며, Line 길이별 Yaw 운동은 Surge, Sway 운동과 마찬가지로 길이가 길어질수록 운동은 증가하지만, 70m 이상의 Line 길이에서는 Yaw 운동의 차이가 없음을 알 수 있다.
계산에 사용한 Tug line은 환경 외력이 큰 경사 방향으로 구조물에 대칭적으로 위치시켜 고정하였다. 하지만, 실제 Tug의 운용각도는 해양 구조물의 위치 유지를 위해 여러 방향으로 변할 수 있으며, 이에 따라서 산정되어지는 평면 운동은 본 경향과 상이 할 것이라고 판단된다. 향후, Line 각도 변화에 따른 평면 운동의 검토가 필요할 것이라고 사료된다. 아울러, 산정되어진 평면 운동의 결과를 토대로 Position keeping시 허용되는 해양 구조물의 운동을 만족하였는지 또는 초과하였는지 평가할 수 있으며, Tug 용량 및 척수를 결정하는 주요한 결과물이 될 것이다.
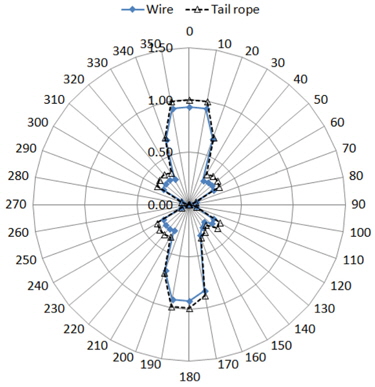
다음으로 환경 외력에 따른 동하중을 포함한 Tug line 하중을 검토하였다. 모든 값들은 Line 하중 최대값을 1로 해서 무차원화 하였다. 계산 파라메터는 상기 평면 운동의 경우와 동일하며, 그림 15에 Line 길이 50m인 경우의 4 Line의 합산 총하중을 입사 환경 방향별로 평가하였다. 각 Line별 하중은 경사 방향에서 크게 나오는 경향을 나타낼지라도, 그림 15의 결과는 4 Line의 하중을 합산한 결과이므로 Surge 및 Sway 방향에서의 하중이 경사 방향보다 상대적으로 크게 나타남을 알 수 있다.
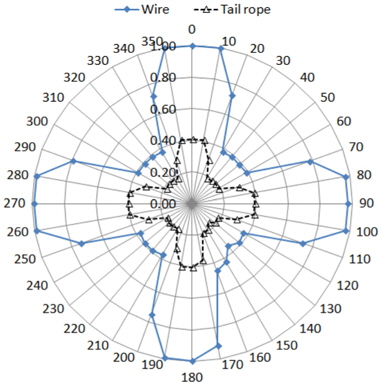
Tug line에 걸리는 하중은 해양구조물의 평면 운동과는 경향이 다르며, Wire의 경우가 Nylon tail rope에 비해 큰 Line 하중을 가짐을 알 수 있다. 이는 Line의 변형량 구속이 Nylon tail rope에 비해 크기 때문에 나타나는 결과라 볼 수 있다. 이를 토대로 Tug line의 허용 하중을 초과하지 않는 적정 Line 길이를 결정할 수 있으며, Nylon tail rope가 계류력을 저감시키는데 큰 효과가 있음을 알 수 있다. 하지만, Tail rope로 사용되는 Nylon rope의 길이가 길어지면, Line 하중은 감소하더라도, 해양 구조물의 허용된 변위를 초과할 수 있기 때문에 적절한 Nylon tail rope 사용이 권장된다.
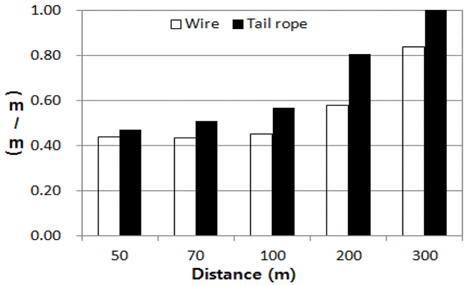
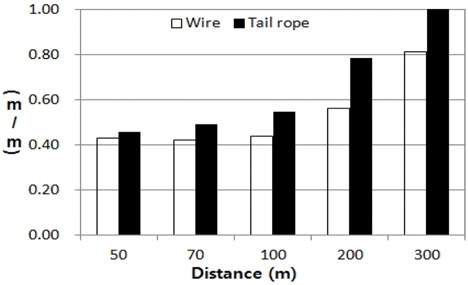
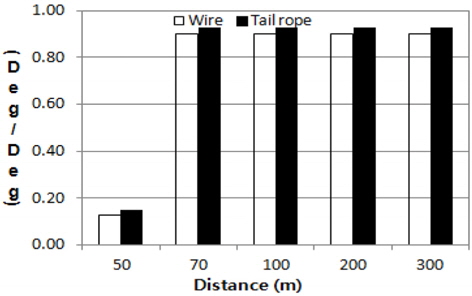
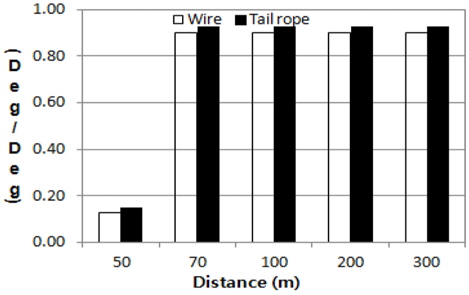
그림 16는 Tug line 길이별로 Line 특성(Wire와 Nylon tail rope)에 따른 Line 동하중을 비교하였다. 최대값을 1로 무차원화 하였으며, Nylon tail rope에 의한 Line 동하중이 Wire에 비해 작음을 알 수 있으며, 2가지 경우 모두, Line 길이가 길어질수록 Line 동하중은 감소함을 알 수 있다. 또한, Nylon tail rope의 경우, Line 길이에 따른 Line 동하중의 차이가 크지 않는 반면에 Wire의 경우는 Line 길이에 따라서 하중의 편차가 크기 때문에 Line의 허용 하중을 초과하지 않는 범위내에서 길이를 선정할 필요가 있다.
6. 결 론
본 논문을 통하여 다음과 같은 결론을 도출하였다.
(1) Tug에 의한 해양 구조물의 위치 유지시, Tug 용량 및 척수는 그 해역의 기상 한계치, Tug line의 길이, Tug line의 특성을 고려해야 한다. 이를 바탕으로 해양 구조물의 허용 변위 및 Tug line의 허용 하중을 기준으로 한 안전성 평가를 통해서 결정되어져 한다.
(2) 일반적으로 그 해역의 1년 Storm 환경 조건에서의 파도, 바람 및 조류를 Tug 위치 유지의 기상 한계치로 가정하며, 각 성분의 환경 외력을 합산하여, 방향별로 무차원하였다.
(3) Tug line 길이 및 특성에 따른 해양 구조물의 변위 및 Tug line의 하중을 분석한 결과, Wire에 의한 Tug line은 해양구조물의 평면 운동을 Nylon tail rope에 비해 많이 구속시켜주는 반면에, 큰 Tug line 하중이 발생함을 알 수 있다.
(4) Tug line 하중 및 평면 운동 결과에 의해, 해양 구조물의 허용 변위 및 Tug line의 허용 하중를 만족하는 Tug line의 특성 및 길이를 결정할 수 있다.




