다물체 동역학을 이용한 연약 지반 4열 궤도 차량의 최적 선회 주행 연구
Study on Optimum Curve Driving of Four-row Tracked Vehicle in Soft Ground using Multi-body Dynamics
Article information
Trans Abstract
This paper proposes an optimum curve driving method for adeep-seabed mining robot(MineRo) in deep-sea soft ground. MineRo was designed as afour-row tracked vehicle. A study on the turning methods for the four-row tracked vehicle was conducted using three case by changing the velocity profile of each track. The configuration of the four-row tracked vehicle and soft ground equation are introduced, along with the dynamics analysis models of MineRo and soft ground, which were constructed using the commercial software DAFUL. Because the purpose of this study was to investigate a driving method on soft ground, the marine environment of the deep sea was not considered.
1. 서 론
1970년대 후반 이후, 심해저 망간단괴의 상업적 생산을 위한 많은 개념들이 연구되어 왔다.(Brink and Chung, 1981; Chung, 1996; Herrouin et al., 1989; Amann et al., 1991; Liu and Yang, 1999; Hong and Kim, 1999; Deepak et al., 2001; Handschuh et al., 2001). 심해저의 퇴적 지반은 매우 높은 함수율을 가진 미세한 입자들로 형성되어 있기 때문에 지반의 지지력이 매우 미약하다는 문제점을 가진다. 따라서 이 지반을 주행하며 망간단괴를 채광하는 장비 또는 로봇은 궤도 차량으로 현재 연구가 진행지고 있다. 궤도 차량의 장점은 접지 면적이 넓기 때문에 연약한 지반에서 충분히 제어 가능한 주행을 할 수 있으며 광범위한 접지 면적으로 인해 Rolling, Pitching이 적어 안정적인 자 세 제어 및 선회 주행이 가능해 진다. 현재 개발 진행 중인 MineRo(Kim et al., 2006; Kim et al., 2007; Choi et al., 2006) 역시 이러한 이유로 궤도 차량으로 개발 되어졌다. 하지만 심해에서의 주행은 여러 변수로 인해 이론적인 결과로 안정적이다 라는 결론을 얻기가 어렵다. 따라서 여러 번의 실험을 수행하여 그 결과들로부터 검증이 이루어 져야 하지만 심해저 실험은 큰 비용이 소비되므로 현실적으로 쉽지가 않다. 시뮬레이션을 기반으로 검증을 해야만 하는 이유가 이것이다.

Deep-seabed mining robot(MineRo)
시뮬레이션을 기반으로 연약 지반에 대한 주행차량의 성능해석 연구는 현재까지 진행되어 왔다(Hayasi, 1975; Kitano and Kuma, 1977; Baladi and Rohani, 1978; Bode, 1991; Murakami et al., 1992; Zhang, 1995; Kim et al., 2003; Kim et al., 2004; Kim et al., 2010).
연약지반 주행차량의 성능해석에 대한 컴퓨터 시뮬레이션은 보통 2가지로 나눌 수 있다. 실제모델과 아주 유사하게 모델링하는 다물체 차량 모델링과 실제모델을 간단히 하여 하나의 강체로 모델링하는 강체 차량 모델링으로 나눌 수 있다. 강체 차량 모델 해석은 차량의 각 요소의 세부적인 모델링 대신에 1개의 강체로 모델링하기에 수치 해석 시간이 아주 짧아지지만 복합적인 기계장치들을 하나의 강체에 표현하다 보니 정확도 면에서 보장되지 않는다. 그러나 다물체 차량 모델 해석은 차량의 각 요소의 세부적인 모델링을 바탕으로 각 요소에 대한 동적 거동 특성의 예측이 가능하다는 점과 이러한 동적 거동 특성을 통하여 세부설계 제작에 아주 유용하게 사용될 수 있다는 장점이 있다.
심해저 장비의 시뮬레이션에 있어 가장 중요한 것은 해석 속도가 아니라 얼마나 더 정확하게 기계 장치의 동적 거동을 표현하고 분석하느냐에 있다.
본 연구에서는 선행 연구들의 결과를 활용하여 4열 궤도 차량이 연약 지반에서 최적의 선회 주행이 가능하게 하는 주행방법을 다물체 동역학 해석 기법을 이용하여 찾고자 한다. 여기서 최적 선회 주행이란 연약 지반에서 차량이 동일한 주행 속도(무게 중심 기준)로 선회 주행 시에 선회 반경이 더 작은 주행 조건을 말한다. 조건에 따라 동일한 주행 속도에서 선회 반경이 크게 달라지는 원인은 연약 지반의 환경적 요인으로 인해 슬립과 침하가 발생하여 주행 및 선회에 영향을 미치기 때문이다. 연약 지반에서의 최적 선회 운동을 찾는 다는 것은 주행 제어에 소비되는 에너지의 감소와 이로 인한 장비의 활용 기간의 증대와 비례하는 관계를 갖기 때문에 장비의 상용화 시 운용에 대한 중요한 자료가 된다. 연구에서 사용된 다물체 동역학 해석은 차량 동역학 및 구조 동역학 등에서 많이 활용되고 암시적적분 방법과 절대 좌표계를 사용하는 상용 소프트웨어 DAFUL(2012)을 사용하였다. DAFUL은 다양한 툴킷을 가지고 있으며, 특히 무한 궤도 주행 차량의 동적 거동 해석이 가능한 Tracked vehicle system module이 탑재 되어 있어 짧은 시간에 궤도 차량의 모델링이 가능하며, 궤도와 궤도, 궤도와 지면 사이의 연성 해석이 가능하여 복합적인 해석 및 분석이 가능하다는 장점이 있다.
2. MineRo 모델
2.1 MineRo의 다물체 동역학 모델
MineRo는 좌, 우측 두 개의 단일 모듈로 구성되어 있으며 각각의 단일 모듈은 주행 장치, 채집 장치, 파쇄 장치, 송출 장치, 유압 장치, 전기 전자 장치 등으로 구성 되어있다. 두 개의 단일모듈은 하나의 프레임에 의해 합쳐진다. 그러나 해석 속도의 향상을 위해 MineRo의 복잡한 기계장치를 단순화 하여 모델링하였다. 모델링 된 MineRo의 구성요소는 Table 1과 같다.
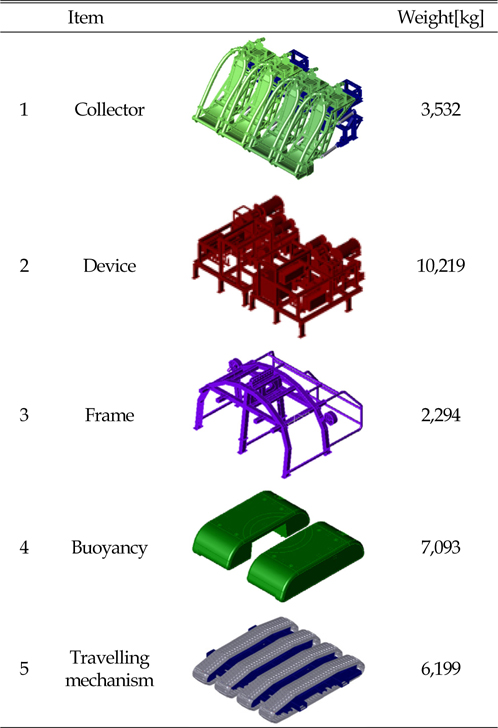
Components of MineRo for simulation
MineRo의 공기 중 무게는 27,336kg이고 수중 무게는 공기 중 무게에서 부력을 뺀 값으로 9,381kg이다. 본 연구에서는 해류, 유체저항, 부력 등의 해양 환경이 주행 특성에 영향을 줄 수 있기 때문에 해양 환경을 모델링에서 제외하고 연약 지반에 대한 주행 특성만을 고려하고 MineRo의 무게는 공기 중 무게 27,336kg로 결정하여 모델링 하였다.
MineRo의 주행시 선회 운동에 큰 영향을 미치는 기계 장치는 주행 장치이므로 주행 장치를 제외한 기계, 유압, 전기 장치 들은 움직임이 없는 강체로 결정하고 주행 장치만 다물체 모델링을 하여 연약 지반에 대한 선회 운동을 분석하여 해석 시간과 해석의 효율을 효과적으로 하였다.
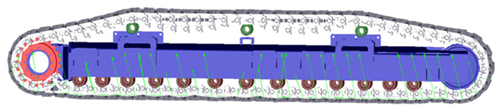
주행 장치 모델은 Fig. 2처럼 Chained system으로 구성되어 있고 Chained system은 Chained segments, Tracked system, Sprocket으로 구성된다. 각각의 Chained segment들은 Bushing force(DAFUL, 2012)로 연결되어 있다.
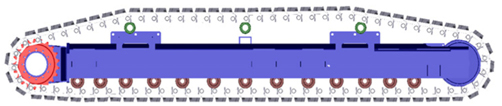
Chained system(caterpillar) of travelling mechanism
연구를 위해 개발된 MineRo 모델은 Fig. 3과 같다.
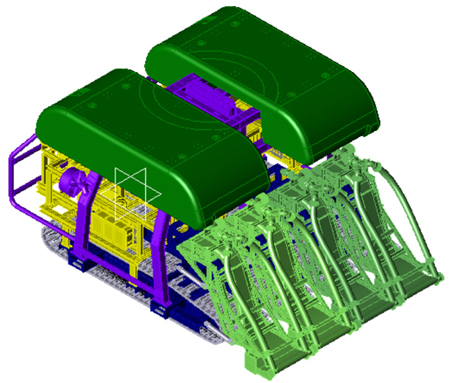
MineRo model for simulation
2.2 연약 지반 모델
연약 지반과 차량의 접촉은 Tracked link와 Ground 사이에 Vector force(DAFUL, 2012) 요소를 이용하여 모델링 하였다. 연약 지반 모델과 궤도 차량의 움직임에 의해 결정된 지반 반발력이 Vector force를 tracked link들로 적용이 된다.
연약 지반의 지반 반발력은 수직응력, 전단응력, 다짐저항으로 나눌 수 있다. 수직응력과 전단응력에 대한 무한궤도식 주행 차량의 동적 해석 방법은 과거 연구가 진행된 바 있으며(Kim et al., 2003) 식 (1)은 수직응력, 식 (2)는 전단응력 모델이다. 본 연구에서는 이를 기반으로 궤도 차량의 지반 침하에 의한 다짐저항력을 추가하여 지반 반발력을 재구성 하였다.(Wong, 2001) 다짐저항력은 식 (3)과 같이 표현한다.

여기서 p*는 초기 압력, is는 정적 침하량, K1, K2는 압력-침하 상관 계수를 각각 나타낸다.

여기서 Tm는 최대전단응력, E는 민감도, kw는 최대전단응력에서의 전단 변위, s는 전단변위를 각각 나타낸다.

여기서 Ks1 = K1/p*, Ks2 = K2/p* 를 각각 나타낸다.
위 식들을 통해 계산된 힘 요소들은 식 (4)를 통해 일반 좌표계의 힘으로 변환되어 Fig. 4처럼 각각의 Tracked link로 적용된다.
Applied soil force in tracked link

여기서 ux , uy , un 는 방향 벡터, fs = τ ∙ A , fs = p ∙ A , fR = Ω ∙ A/2L, A는 Tracked link의 단면적, L은 Tracked link의 수평방향 길이 나타낸다.
2.3 지배 방정식
4열 궤도 차량과 같은 질량이 상대적으로 작고 자유도가 많은 모델의 경우 해의 수렴성과 다물체 동역학 해석 시간을 단축하기 위해 암시적 수치 방법(Implicit numerical method)을 사용한다.
MineRo의 동역학 해석을 위한 운동방정식은 식 (5)와 같다.

여기서 M은 질량행렬, q는 일반 좌표, fc는 지반 반발력, ff는 Chained system에 적용된 힘, fd는 입력 속도에 의한 일반화 힘,  λ는 구속력, λ는 라그랑지 승수를 나타낸다.
λ는 구속력, λ는 라그랑지 승수를 나타낸다.
구속력을 계산하기 위한 구속 조건 Φ는 다음과 같이 정의된다.

식 (5)와 (6) 그리고 위치와 속도에 대한 수치 적분식 Iq, Iv 를 이용하여 다물체 동역학 시스템의 지배 방정식을 식 (7)과 같이 정의한다.
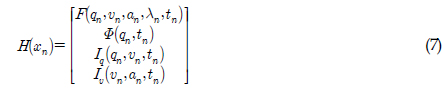
여기서 임의의 시간에 대해 풀어야할 미지수  과 같이 쓸 수 있다.
과 같이 쓸 수 있다.
식 (7)은 일반적으로 식 (8)과 식 (9)과 같이 Newton′s method를 이용하여 풀 수 있다.(Haug, 1989)


여기서 H𝓍 는 지배방정식의 자코비안 행렬, 임의의 시간에 대한 미지수 𝓍의 해는 식 (8), (9)를 반복해서 계산 한다. 이 때 수렴조건은 미지수 𝓍의 변화량이 정해진 공차 이내로 한다.
3. MINERO의 선회 주행
3.1 선회 주행 조건 및 해석 조건
4열 궤도의 주행은 궤도 하나하나가 별도로 구동이 되므로 궤도마다 속도가 상이하다. 4열 궤도 차량의 최적 선회 방법을 찾기위해서 3가지 조건의 속도 프로파일과 2가지 조건의 SR로 해석 조건을 결정하였다. 속도 프로파일이란 궤도마다의 속도를 개형으로 나타낸 것이고 Fig. 5와 같다. SR은 궤도 차량의 좌측 모듈과 우측 모듈의 속도비를 나타내며 Fig. 6에서 VR/VL이 SR이다.

Velocity profile for curve driving

Definition of track velocities
본 연구에선 MineRo의 VR 는 500mm/s 이며 SR은 1.5, 2.0으로 하여 각 트랙의 주행 속도를 결정하였다. 그리고 트랙의 주행을 가능케 하는 Sprocket의 회전 속도를 식 (10)을 통해 계산하여 해석 모델에 적용하였다.

여기서 𝜔i는 i번째 Sprocket의 회전 속도, Vi는 i번째 트랙 속도, R은 Sprocket 반지름을 나타낸다.
4열 궤도 차량 Sprocket의 반지름은 224.5mm, 트랙의 병진 속도와 Sprocket 회전 속도는 Table 2, 3과 같다.

Translational velocity of four rows tracked vehi

Angular velocity of sprockets
연약 지반의 토양 특성은 Table 4와 같다.
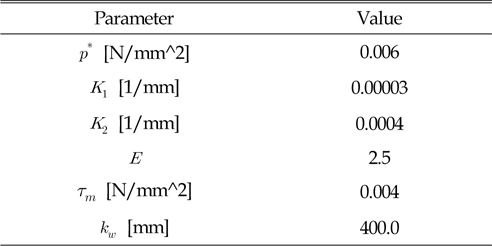
Soil properites
3.2 주행 해석 결과
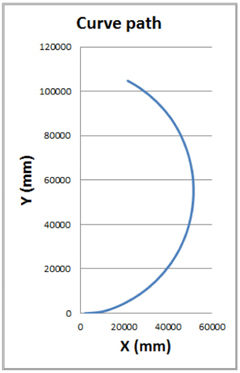
정확한 분석을 위해서는 더 오랜 시간의 주행 시뮬레이션을 바탕으로 분석해야 하지만 다물체 동역학의 특성상 수렴된 정확해를 주는 대신 오랜 해석 시간이라는 단점에 의해 그리하지 못하였다. MineRo의 선회 주행의 타당성을 위해 SR = 1.5, Velocity profile = CASE I의 조건으로 500sec 선회 주행을 수행하였고 Fig. 7처럼 충분한 선회 주행의 결과를 얻었다. 이를 기반으로 타 조건들의 100sec 선회 주행을 수행하였기 때문에 본 연구의 결과들이 선회 주행의 특성 결과임을 확신시켜준다.
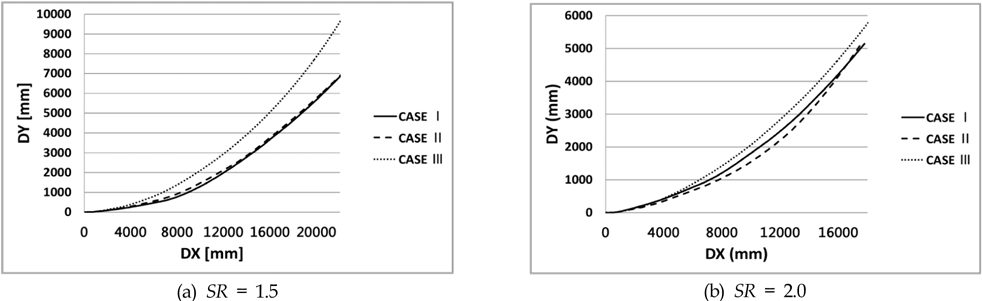
속도 프로파일과 SR에 따른 선회 주행 결과는 Fig. 8과 같다.
Curve path of MineRo
Fig. 7의 이동 경로를 이용하여 궤도의 선회 반경을 계산하면 Table 5와 같다.
Curve path verification
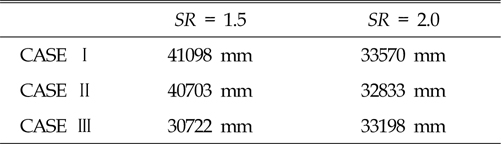
Curve radius of MineRo
선회 반경의 크기는 다음과 같이 열거할 수 있다.
(a) SR이 1.5인 경우, CASE I > CASE II > CASE III
(b) SR이 2.0인 경우, CASE I > CASE III > CASE II
SR이 1.5인 경우 CASE III의 선회 성능이 가장 좋지만 2.0인 경우 CASE II의 선회 성능이 더 좋다. SR의 크기가 클수록 선회 성능은 더 좋아질 것으로 예상되었으나 CASE III는 선회 성능이 저감되었다. 하지만 CASE에 따른 선회 반경의 변화를 보면 SR이 1.5인 경우 선회 반경의 차이가 크지만 2.0인 경우 선회 반경의 차이가 거의 없다. 원인 분석을 위해 MineRo의 실제 진행속도와 각 궤도의 Sinkage, Slip velocity를 분석하였다. Fig. 9은 MineRo의 진행속도를 Fig. 10, 11, 12은 각 궤도의 Sinkage 와 Slip velocity를 보여준다.

Translational velocity of MineRo

Sinkage of FRTV
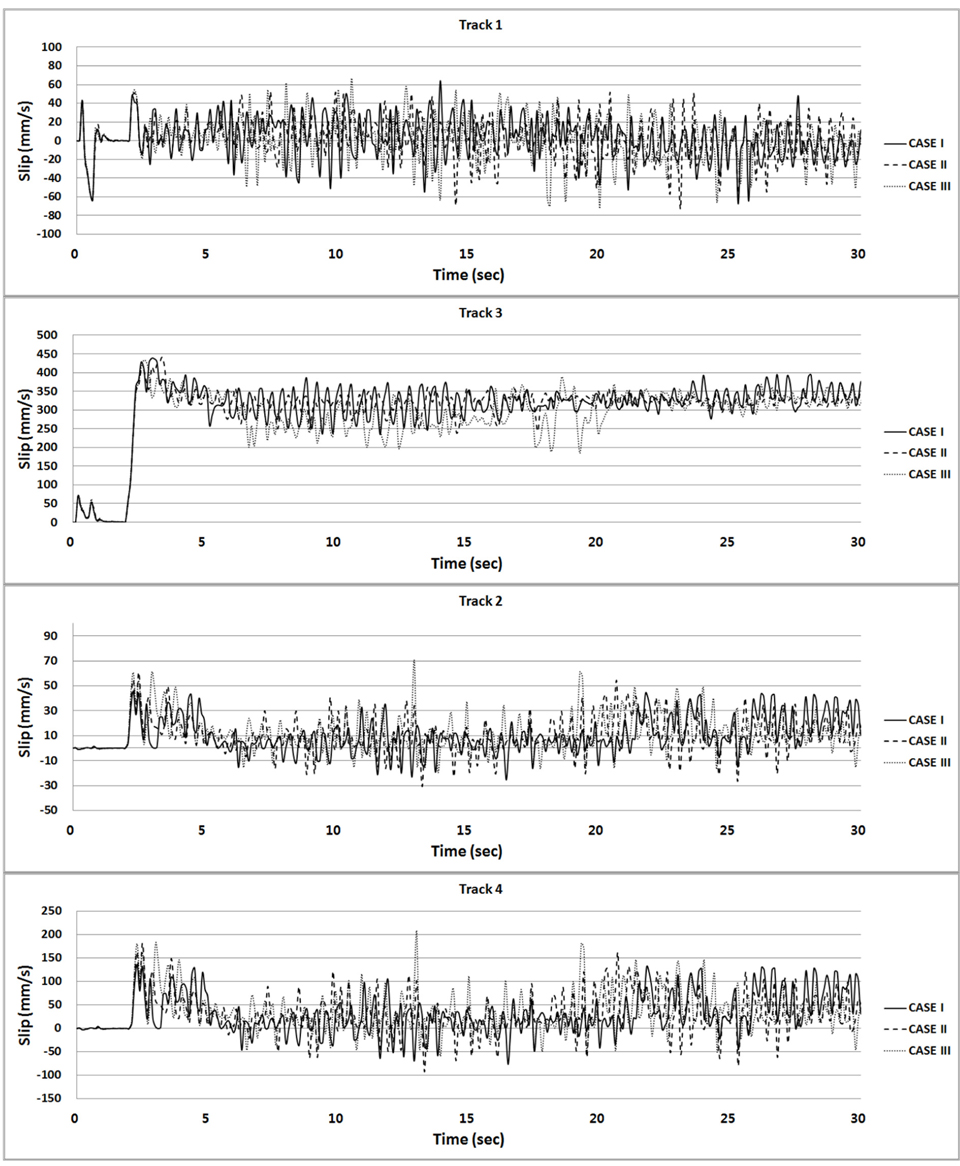
Slip velocity of FRTV when SR is 1.5
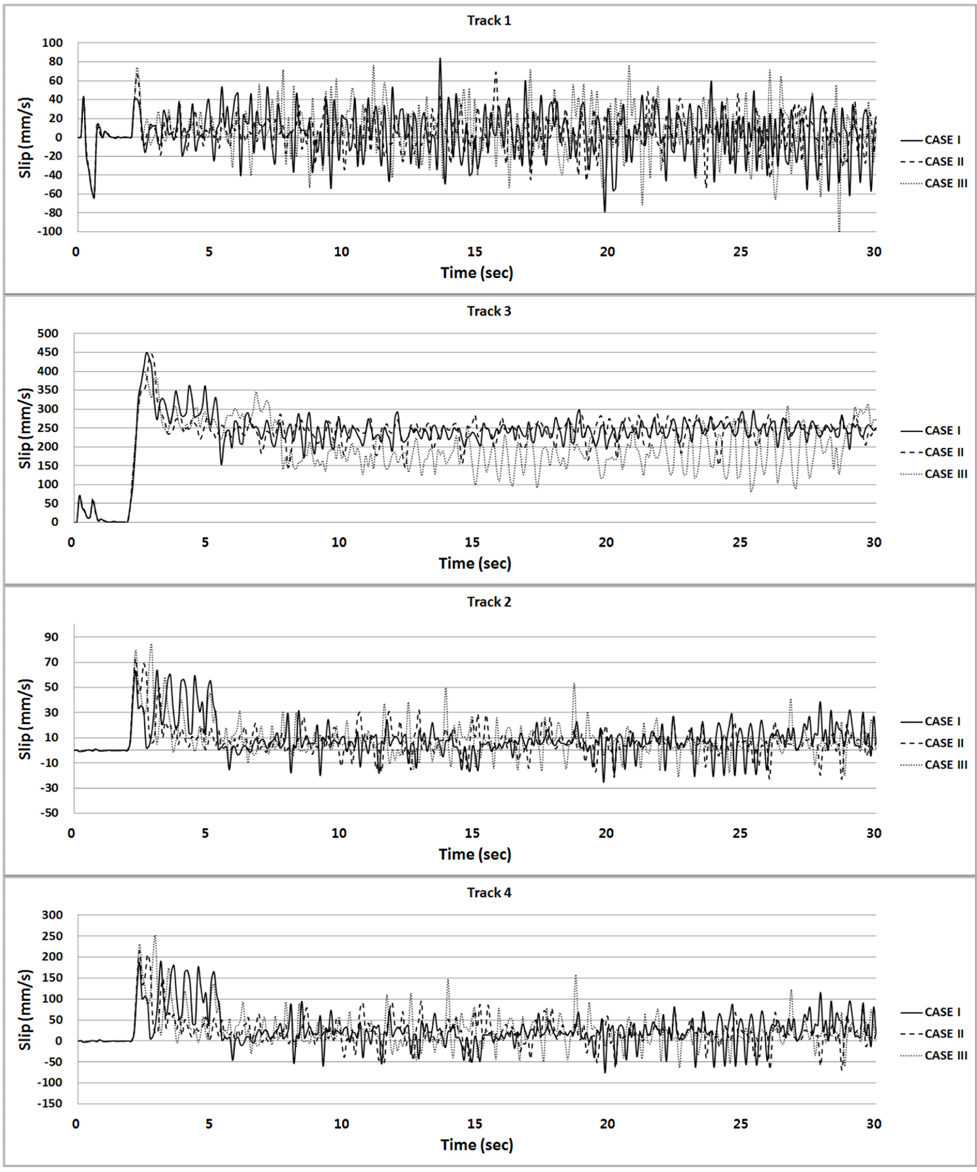
Slip velocity of FRTV when SR is 2.0
SR이 1.5인 경우 진행방향 속도가 Velocity profile에 관계없이 유사하기 때문에 Steering ratio에 따라 선회 반경이 결정된다. 하지만 SR이 2.0인 경우 Velocity profile에 따라 진행방향 속도가 다르다. 이 때문에 선회 반경이 Steering ratio에 따라 결정되지 않음을 보여준다.
Fig. 10의 각 궤도의 Sinkage와 Fig. 11, 12의 각 궤도의 slip velocity를 보면 SR이 1.5일 때는 Slip velocity가 평균적으로 큰 차이 없이 주행을 하지만 2.0일 때는 차이가 발생하여 진행 속도에 영향을 줌을 알 수 있었다. SR이 크면 선회 성능이 당연히 좋아질 것으로 예측 되었지만 이 연구를 통해 SR의 임계값이 주어져야 로봇의 주행에 있어 안정적인 주행을 보장할 수 있음을 알 수 있었다. 불안정적인 원인 규명은 아직 수행되지 않았으며 다음 연구를 통해 수행할 계획이다.
4. 결 론
본 논문에서는 시뮬레이션을 이용하여 궤도 차량의 최적 선회 주행 방법을 연구하여 실험을 대체하는 해석 모델을 개발하였다. 본 연구를 통해 얻은 결론은 다음과 같다.
(1) 궤도 차량의 속도 프로파일과 좌우측 속도 비에 따라 선회 반경의 차이가 크며 CASE III이 현재 최적의 선회 조건이다.
(2) 각각의 CASE의 경우 SR이 커질수록 선회 반경이 작아져 더 좋은 선회 성능을 얻을 것으로 예상되지만 CASE III의 경우 크게 좋아지지 않았으며 SR이 2.0인 경우 Velocity profile 별로 큰 차이가 없었으며 불안정 주행을 하였다.
(3) 최적 선회 주행 기법을 선택하기 위해서는 먼저 SR의 값을 결정해야 하고 SR의 결정을 위해 임계값을 사전 연구를 통해 찾아야 로봇이 안정적인 주행을 할 수 있다.
(4) 강체 모델로 해석할 수 없었던 궤도 차량의 궤도와 궤도사이, 궤도와 지면 사이의 연성 해석을 통해 Fig. 13, 14처럼 궤도들의 연성이 차량의 주행 특성, 주행 속도에 영향을 준다는 사실과 이는 최적 선회 주행에도 영향을 준다는 점을 확인할 수 있었다. 따라서 기존에 강체 모델 해석의 결과는 이러한 점을 고려하지 않기 때문에 정확한 시뮬레이션 결과를 얻기 위해서는 비선형 다물체 해석을 수행하여야 한다. Fig. 13은 차량의 입력 속도가 0.5m/s로 주어졌을 때 강체 차량 모델의 실제 주행 속도와 다물체 차량 모델의 주행 속도 비교를 Fig. 14는 FFT를 이용한 주행 속도의 특성 비교를 보여준다.
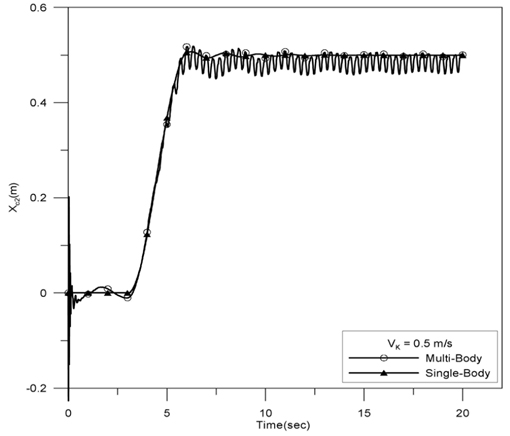
Compare of driving velocities
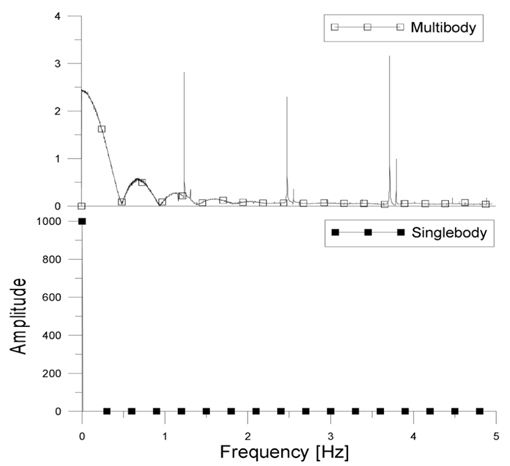
Compare of driving velocities characteristic (FFT)
Fig. 14을 보면 다물체 해석과 강체(Singlebody) 해석의 차이를 명확하게 확인할 수 있다. 다물체 해석에서는 여러 연성 작용에 의한 특성이 주파수 대역으로 검출이 되지만 강체 해석에서는 연성 효과가 없으므로 단일 주파수만 검출이 된다.
차 후 연구에서는 SR의 임계값에 대한 연구 및 결정된 최적 선회 방법을 통합 채광 시스템 모델에 적용하여 복합적인 힘들이 작용할 때도 적용시킬 수 있는지 확인 할 예정이다.
Acknowledgements
본 연구는 해양수산부의 지원으로 수행된 “심해저 광물자원 통합 채광시스템 개발 연구” 과제의 연구결과 중 일부임을 밝힙니다.
References
Amann, H., Oebius, H.U., Gehbauer, F., Schwarz, W., Weber, R., 1991. Soft Ocean Mining. Proceedings of Offshore Technology Conference, Houston, Paper 6553.
Amann H., Oebius H.U., Gehbauer F., Schwarz W., Weber R.. Soft Ocean Mining, Paper 6553 In : Proceedings of Offshore Technology Conference; 1991.Baladi, G.Y., Rohani, B., 1978. A Mathematical Model of Terrain Vehicle Interaction for Predicting the Steering Performance of Track-laying Vehicles. Proceedings of The 6th ISTVS Conference, 285-332.
Baladi G.Y., Rohani B.. A Mathematical Model of Terrain Vehicle Interaction for Predicting the Steering Performance of Track-laying Vehicles In : Proceedings of The 6th ISTVS Conference; 1978. p. 285–332.Bode, O., 1991. Simulation der Fahrt von Raupen-fahrwerken auf Teefseeböden. Doctoral Dissertation, Univ. of Hanover.
Bode O.. Simulation der Fahrt von Raupen-fahrwerken auf Teefseeböden. Doctoral Dissertation. Univ. of Hanover; 1991.Brink, A.W., Chung, J.S., 1981. Automatic Position Control of a 300,000-Ton Ship Ocean Mining System. Proceedings of Offshore Technology Conference, Houston, Paper 4091.
Brink A.W., Chung J.S.. Automatic Position Control of a 300,000-Ton Ship Ocean Mining System, Paper 4091 In : Proceedings of Offshore Technology Conference; 1981.Chung, J.S., 1996. Deep-ocean Mining. Technologies for Manganese Nodules and Crusts. Offshore and Polar Engineering, ISOPE, 6(4), 244-254.
Chung J.S.. Deep-ocean Mining. Technologies for Manganese Nodules and Crusts. Offshore and Polar Engineering 6(4)ISOPE; 1996;:244–254.Choi, J. S., Hong, S., Kim, H. W., 2006. An Experimental Study on Steering Performance of Tracked Vehicle on Deep-sea Cohesive Soft Soil by DOE using Orthogonal Arrays. Journal of Ocean Engineering and Technology, 20(4), 37-42.
Choi J. S., Hong S., Kim H. W.. An Experimental Study on Steering Performance of Tracked Vehicle on Deep-sea Cohesive Soft Soil by DOE using Orthogonal Arrays. Journal of Ocean Engineering and Technology 20(4)2006;:37–42.Deepak, C.R., Shajahan, M.A., Atmanand, M.A., Annamalai, K., 2001. Development Tests on the Underwater Mining System Using Flexible Riser Concept. Proceedings of 4th ISOPE Ocean Mining Symposium, Szczecin, 94-98.
Deepak C.R., Shajahan M.A., Atmanand M.A., Annamalai K.. Development Tests on the Underwater Mining System Using Flexible Riser Concept In : Proceedings of 4th ISOPE Ocean Mining Symposium; 2001. p. 94–98.DAFUL, 2012. DAFUL User's Manual. Virtual Motion, Inc.
DAFUL User's Manual Virtual Motion, Inc.; 2012.Handschuh, R., Grebe, H., Panthel, J., Schulte, E., Wenzlawski, B., Schwarz, W., Atmanand, M.A., Jeyamani, R., Shajahan, M., Deepak, C., Ravindran, M., 2001. Innovative Deep Ocean Mining Concept based on Flexible Riser and Self-propelled Mining Machines. Proceedings 4th ISOPE Ocean Mining Symposium, Szczecin, 99-107.
Handschuh R., Grebe H., Panthel J., Schulte E., Wenzlawski B., Schwarz W., Atmanand M.A., Jeyamani R., Shajahan M., Deepak C., Ravindran M.. Innovative Deep Ocean Mining Concept based on Flexible Riser and Self-propelled Mining Machines In : Proceedings 4th ISOPE Ocean Mining Symposium; 2001. p. 99–107.Haug E.J., 1989. Computer-Aided Kinematics and Dynamics of Mechanical Systems, Volume I: Basic Methods, Allyn and Bacon.
Haug E.J.. Computer-Aided Kinematics and Dynamics of Mechanical Systems, Basic Methods Allyn and Bacon; 1989.Hayasi I., 1975. Practical Analysis of Tracked Vehicle Steering Depending on Longitudinal Track Slippage. Proceedings of ISTVS Conference, 2.
Hayasi I.. Practical Analysis of Tracked Vehicle Steering Depending on Longitudinal Track Slippage In : Proceedings of ISTVS Conference; 1975. p. 2.Herrouin, G., Lenoble, J.P., Charles, C. Mauviel, F., Bernard, J., Taine, B., 1989. A Manganese Nodule Industrial Venture Would Be Profitable. Summary of a 4-Year Study in France. Proceedings of Offshore Technology Conference, Houston, Paper 5997.
Herrouin G., Lenoble J.P., Charles C., Mauviel F., Bernard J., Taine B.. A Manganese Nodule Industrial Venture Would Be Profitable. Summary of a 4-Year Study in France, Paper 5997 In : Proceedings of Offshore Technology Conference; 1989.Hong, S., Kim, H.W., 1999. Proposed Technologies for Mining Deep-Seabed Polymetallic Nodules Chap 12 Research and Development of Deep Seabed Mining Technologies for Polymetallic Nodules in Korea. Proceedings of International Seabed Authority's Workshop, Kingston, Jamaica, 261-283.
Hong S., Kim H.W.. Proposed Technologies for Mining Deep-Seabed Polymetallic Nodules Chap 12 Research and Development of Deep Seabed Mining Technologies for Polymetallic Nodules in Korea In : Proceedings of International Seabed Authority's Workshop; 1999. p. 261–283.Kitano, M., Kuma, M., 1977. An Analysis of Horizontal Plane Motion of Tracked Vehicles. Journal of Terramechanics, 14, 211-225.
Kitano M., Kuma M.. An Analysis of Horizontal Plane Motion of Tracked Vehicles. Journal of Terramechanics 141977;:211–225. 10.1016/0022-4898(77)90035-0.Kim, H.W., Hong, S., Choi, J.S., 2003. Comparative Study onTracked Vehicle Dynamics on Soft Soil : Single-BodyDynamics vs. Multi-body Dynamics. ISOPE, OMS-2003, Japan,132-138.
Kim H.W., Hong S., Choi J.S.. Comparative Study onTracked Vehicle Dynamics on Soft Soil : Single-BodyDynamics vs. Multi-body Dynamics In : ISOPE, OMS-2003; 2003. p. 132–138.Kim, H.W., Hong, S., Choi, J.S., 2004. A Study on Prediction Model of Tracked Vehicle for Straight Maneuvering on Soft Soil. ISOPE-2004, Tullon, France, 83-89.
Kim H.W., Hong S., Choi J.S.. A Study on Prediction Model of Tracked Vehicle for Straight Maneuvering on Soft Soil In : ISOPE-2004; 2004. p. 83–89.Kim, H.W., Hong, S., Choi, J.S., Yeu, T.K., 2006. Dynamic Analysis of Underwater Tracked Vehicle on Extremely Soft Soil by Using Euler Parameter. Journal of Ocean Engineering and Technology, 20(6), 93-100.
Kim H.W., Hong S., Choi J.S., Yeu T.K.. Dynamic Analysis of Underwater Tracked Vehicle on Extremely Soft Soil by Using Euler Parameter. Journal of Ocean Engineering and Technology 20(6)2006;:93–100.Kim, H.W., Hong, S., Choi, J.S., Yeu, T.K., 2007. Multibody Dynamic Analysis of a Tracked Vehicle on Soft Cohesive Soil. Journal of Ocean Engineering and Technology, 21(1), 69-74.
Kim H.W., Hong S., Choi J.S., Yeu T.K.. Multibody Dynamic Analysis of a Tracked Vehicle on Soft Cohesive Soil. Journal of Ocean Engineering and Technology 21(1)2007;:69–74.Kim, H.W., Hong, S., Lee, C.H., Choi, J.S., Yeu, T.K., 2010. A Study on Steering Characteristics of Four-Row Tracked Vehicle on Extremely Cohesive Soft Soil. Proceedings of the 9th Asia-Pacific ISTVS Conference, Sapporo, Japan.
Kim H.W., Hong S., Lee C.H., Choi J.S., Yeu T.K.. A Study on Steering Characteristics of Four-Row Tracked Vehicle on Extremely Cohesive Soft Soil In : Proceedings of the 9th Asia-Pacific ISTVS Conference; 2010.Liu, F., Yang, N., 1999. Proposed Technologies for Mining Deep-Seabed Polymetallic Nodules Chap 9 Environmentally Friendly Deep Seabed Mining System. Proceedings of International Seabed Authority's Workshop, Kingston, Jamaica, 187-211.
Liu F., Yang N.. Proposed Technologies for Mining Deep-Seabed Polymetallic Nodules Chap 9 Environmentally Friendly Deep Seabed Mining System In : Proceedings of International Seabed Authority's Workshop; 1999. p. 187–211.Murakami, H, Watanabe, K., Kitano, M., 1992. A Mathematical Model for Spatial Motion of Tracked Vehicles on Soft Ground. Journal of Terramechanics, 29, 71-81.
Murakami H, Watanabe K., Kitano M.. A Mathematical Model for Spatial Motion of Tracked Vehicles on Soft Ground. Journal of Terramechanics 291992;:71–81. 10.1016/0022-4898(92)90015-C.Wong J.Y., 2001. Theory of Ground Vehicles, John Wiley & Sons, Inc.
Wong J.Y.. Theory of Ground Vehicles John Wiley & Sons, Inc.; 2001.Zhang, Yilin., 1995. Prustands und Rechnersimu-lation der Kurvenfahrt von Raupenfahrwerken auf Extrem Weichen Boden. Doctoral Dissertation (in German), Univ. of Hanover.
Zhang Yilin. Prustands und Rechnersimu-lation der Kurvenfahrt von Raupenfahrwerken auf Extrem Weichen Boden. Doctoral Dissertation. Univ. of Hanover; 1995.