


1. 서 론
2013년부터 시작된 수중건설로봇 개발 사업(Jang et al., 2014) 에서는 목표 수심 500미터 내외의 해양 구조물 건설을 위한 수 중건설로봇의 개발을 목표로 하고 있으며, 공통 기술 및 경작업 용 ROV(Remotely operated vehicle)와 스키드 타입의 케이블 매설용 ROV, 트랙 기반 중작업용 ROV의 개발을 목표로 하고 있다. 그 중에서 트랙 기반 중작업용 수중건설로봇은 압축강도 20MPa 이상의 지반 조건에서 트랙을 이용한 이동 및 파이프라 인의 매설과 암 파쇄 등의 수중 작업을 수행할 수 있는 로봇 플랫폼으로, 매설 작업을 위한 트렌처 및 파쇄 작업을 위한 락 크러셔, 다용도 작업을 위한 버킷, 그리퍼 등의 툴을 교체하여 사용할 수 있도록 고안되었다. 중작업용 수중건설로봇은 총 500마력의 출력을 내는 유압 시스템으로 구성되며, 이를 위한 복수의 HPU(Hydraulic power unit) 및 밸브팩, 제어기 등 관련 유압 제어부가 플랫폼 상에 탑재된다. 유압 제어부는 HPU에서 생성된 유압을 분배하고 각 수요 라인별로 밸브를 제어하여 로봇 플랫폼의 이동 및 작업 툴 구동 등의 동작을 수행할 수 있도록 한다. 유압 제어부는 이러한 동작을 플랫폼 상에서 직접 제어하기 위해 산업용으로 사용되는 저수준의 하위 제어기를 포함하고 있으며, 유압 관련 밸브 제어 및 센서 데이터 수집 등의 핵심 기능을 수행한다. 만약 이 제어기가 동작 중에 오류로 인한 오작동 또는 정지하는 상황이 발생하게 되면 선상으로부터의 제어 및 모니터링이 되지 않으므로, 수중 환경과 수행 작업에 따라 로봇 플랫폼의 손상 등이 발생할 가능성이 있다. 따라서 유압 제어부는 로봇 플랫폼으로서 요구되는 이동 및 작업 성능을 만족해야 할 뿐만 아니라, 그 동작의 안정성에 있어서도 매우 높은 수준의 품질을 제공하는 것이 요구되며, 이러한 요구기준에 맞춰 설계되고 구현되어야 한다. 수중 환경에서는 고장이 발생하여도 쉽게 접근하여 교체나 수리가 매우 어렵기 때문에 복수의 제어기를 배치하는 것이 요구되며 여러 내압용기와 장치 간에 연결되는 케이블의 단락이나 손상 여부를 파악하여 이를 극복할 수 있어야 한다.
본 논문에서는 유압 제어부의 동작 안정성을 향상하고 성능 품질을 높이기 위한 방안으로 이중화 구조의 제어기의 설계를 제안하며, 먼저 기존 이중화 설계와 관련된 연구 동향을 제시하고, 이를 적용하여 제어 및 통신, 배선의 이중화를 통해 동작 실패가 일어날 수 있는 상황을 극복하기 위한 방안을 서술한다.
2. 동작 안정성 향상을 위한 제어부 이중화 설계
2.1 관련 연구 동향
다중화는 사회 기간망이나 주요 시설, 장비의 운용 시스템 등 여러 분야에서 동작 안정성과 연속성을 보장하기 위한 방법으로 하드웨어 및 소프트웨어 운용 체계를 중복되게 설계하여 구현하게 된다. 대표적인 다중화의 구성 방식으로는 이중화(Dual redundancy)가 있으며, 이중화 시스템은 단일 고장점(SPOF, single point of failure)을 극복할 수 있는 최소한의 하드웨어적 비용이 소요되는 구성 방식으로 복수의 하드웨어 및 소프트웨어 운영체계를 동시 또는 순차적으로 운용하여 문제 발생 감지 시 동작 전환(Switch-over)을 수행할 수 있도록 설계된다.
Gohil et al.(2011)는 다중화 관리(Redundancy management)가 무엇이고 어떻게 구성되는지를 설명하고 있으며, 다중화를 시스템의 사용성이나 안정성을 확보하는데 필요로 하는 중요 컴포넌트에 대한 복제로 정의하고 있다.
다중화 구성 모델 중 하나로는 병렬 다중화로 알려져 있는 ‘N-modular redundancy’가 있으며, Fig. 1과 같이 동일한 규격의 다수 컴포넌트(Un)들을 중복 배치하여 모든 컴포넌트가 동시에 실행되고, 동일한 입력 정보를 받도록 동기화되는 것이 특징이다. 이러한 구성 방식의 장점으로는 시스템의 가용성이 매우 높고 컴포넌트 간 전환 시간이 짧으며 동시에 입력 정보를 처리하므로 동작 전환 과정에서의 데이터 손실이 최소가 된다. 그러나 전원부 실패(Common mode failure)에 대한 손상으로 인해 동작이 중지될 가능성이 있으므로 이의 대비를 하는 것이 필요하다. 이 병렬 다중화 구성에서는 주로 이중화(DMR, Dual modular redundancy) 및 삼중화(TMR, Triple modular redundancy)의 구성을 사용한다. 보통 안정성이 최우선인 항공기의 유압 시스템에서는 중요 제어부를 삼중화하고 있으며 하나의 컴포넌트가 문제 발생 시 다른 두 개의 컴포넌트가 이를 보완하도록 구성한다.

이중화 구성은 그 구조가 간단하여 운용이 편리하나, 다중화가 미 적용된 시스템에 비해 추가적인 하드웨어와 소프트웨어 개발이 필요하여 구성비용이 두 배가 넘게 소요되는 제약이 있다. 삼중화 구성은 두 개의 예비 컴포넌트가 있어 운용의 안정성이 높다고 할 수 있으나, 하드웨어 구축 및 운용 소프트웨어 개발 비용이 더 소요되고 구조가 복잡하여 유연한 운용을 위한 노력이 필요하다.
이중화된 경우를 상세히 분류하는 모델 중 하나로는 ‘Standby redundancy’가 있으며, Fig. 2와 같이 복제된 두 컴포넌트에 대해 주 컴포넌트(Master)가 운용 중 장애발생 시 예비컴포넌트(Standby)가 기동되어 실행되는 방식을 ‘Cold standby redundancy’, 동시에 두 컴포넌트가 실행되는 중에 장애발생 시 동작이 전환되는 방식을 ‘Hot standby redundancy’라 한다.
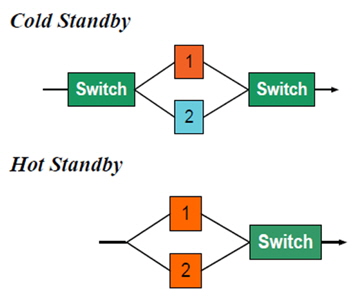
Cold standby redundancy 구성에서는, 여러 장애상황 원인중 전원 이상에 의해 현재 운용중인 컴포넌트의 손상이 발생되어도 예비 컴포넌트를 새로 실행하여 동작 전환 후 운용을 지속할 수 있는 장점이 있으나, 주 컴포넌트의 정지부터 예비 컴포넌트가 실행되기까지 소요되는 시간 동안 시스템의 운용이 중지되기 때문에 동작의 연속성은 보장하지 않는다. 이와 달리 Hot standby redundancy 구성은 주 컴포넌트와 예비 컴포넌트가 동시에 실행되고 있다가 주 컴포넌트의 장애상황을 감지하면 바로 예비 컴포넌트로 동작을 전환시키게 되며, 동작의 연속성을 만족할 수 있으나 전원 이상으로 인한 하드웨어 손상 발생 시 모든 컴포넌트가 정지하게 되는 문제가 있다.
이중화 설계 시에는 제어기에 대한 이중화뿐만 아니라 선로에 대한 이중화도 고려하여야 한다. 전력과 통신 등의 선로를 복수화하고 다양한 원인의 장애 발생 검출 및 전환 동작을 통해 운용이 연속적으로 이루어질 수 있도록 해야 한다.
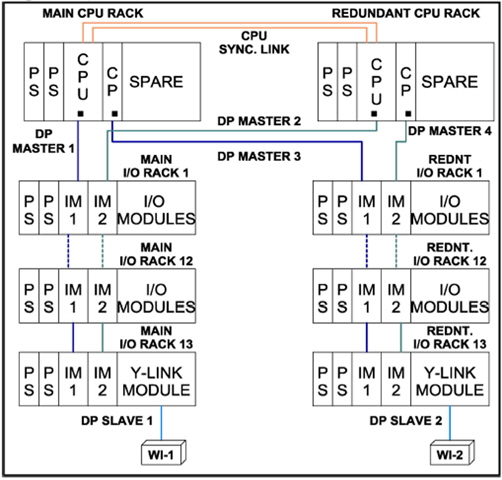
Singh et al.(2014)는 Hot standby redundancy 구성을 갖는 이중화 시스템에서 산업용 통신 버스의 하나인 Profibus를 적용하여 제어기 동작의 실패 강인성(Fault tolerant)을 갖도록 하고 있으며, PLC(Programmable logic controller) 시스템에서 Profibus DP(Decentralized peripheral) 통신을 통해 통신 라인을 이중화하고 동기 및 비동기 통신 프로토콜을 통해 주 제어 컴포넌트의 제어권 결정 및 슬레이브 단의 제어를 수행하는 구성을 제안하고 있다.
Fig. 3에서 상단의 Main CPU rack과 Redundant CPU rack이 이중화로 구성된 주 제어 컴포넌트(Master)이며, Profibus 통신을 통해 I/O Rack인 부 제어 컴포넌트(Slave)들을 제어한다. 만약 통신 라인이 단선되는 등의 장애 발생 시에도 다른 통신 라인을 통해 슬레이브 단을 통한 제어 및 데이터 전송이 주 제어 컴포넌트로 연속되도록 하여 데이터 손실을 최소화하도록 하는 설계를 제안하고 있다.
Moreno et al.(2006)는 TCN(Train communication network) 표준에서 정의하는 시리얼 버스 방식인 MVB(Multifunction vehicle bus)의 통신 라인 이중화를 위한 제어기를 제안하고 있으며, Fig. 4에서 독립된 복수의 물리 배선에서 신호를 보내고 받기 위한 인코더와 디코더에 의한 제어 구조를 보이고 있다.

2.2 배선 이중화 설계
중작업용 수중건설로봇 플랫폼의 유압제어부의 동작 안정성을 향상하기 위한 설계에서 고려해야 할 사항으로는, 주 제어기(Master)에서 내려진 명령에 대해 유압회로 제어 밸브와 센서가 직접적으로 연결된 부 제어기(Slave)의 하드웨어 제어 요소에 대한 동작 무결성을 보장하는 것이다.
이를 위해서 기존 연구에서 보여진 제어기의 다중화 및 통신 선로의 다중화 방법 외에도, 슬레이브 단의 제어기로부터 밸브와 센서로의 신호 선로에 대한 다중화 처리가 필요하다. 신호배선에 대한 이중화 설계시에는, 통신 선로와 달리 아날로그 또는 디지털 신호로 송수신되는 저수준의 데이터이므로 이중화시에 소요되는 하드웨어로 인한 노이즈나 시간 지연을 최소화 하여야 하는 제약이 있다. 그리고 센서나 밸브 등의 하드웨어부품은 그 제어 주체가 단일이어야 하고 동시에 여러 노드로부터의 제어는 신호 중첩이 발생하게 된다. 따라서 이러한 조건을반영하여 신호의 발생점과 수용점 간의 배선을 이중화할 수 있는 Cold standby redundancy 구성을 적용하였고, 노이즈와 시간 지연의 최소화를 위해 내부저항이 200밀리옴이고 전환시간이 최대 0.6밀리세컨드인 반도체 타입의 릴레이를 사용하여 평균 1밀리세컨드 이하의 시간으로 배선 선택 전환이 가능한 전처리 스위치 기능을 구현하는 회로의 설계를 진행하였다. 이는 시스템 내 대부분의 센서 데이터 출력 및 제어 주기가 1킬로헤르츠 이하인 하드웨어로 구성되어 있어, 성능저하 없이 배선을 전환하여 연속적으로 데이터를 취득할 수 있도록 한다.
Fig. 5는 이 전처리 스위치 로직 설계를 보이고 있으며, 제어의 대상이 되는 밸브와 센서 등 하드웨어의 신호를 발생점(Source point)로 하여 부 제어기의 입출력 모듈인 수용점(Sink point)까지 복수의 물리적으로 연결된 배선들 중에서 유효한 배선을 선택 가능하도록 하는 회로이다. 이 배선 이중화 회로는 주기적으로 선로가 유효한지를 검사하고 관리하여, 배선 중 일부가 단선 또는 커넥터 고장 등의 문제가 발생하게 되면 장애상황을 극복하기 위해 유효한 신호 채널로 전환하도록 한다.

2.3 제어 이중화 설계
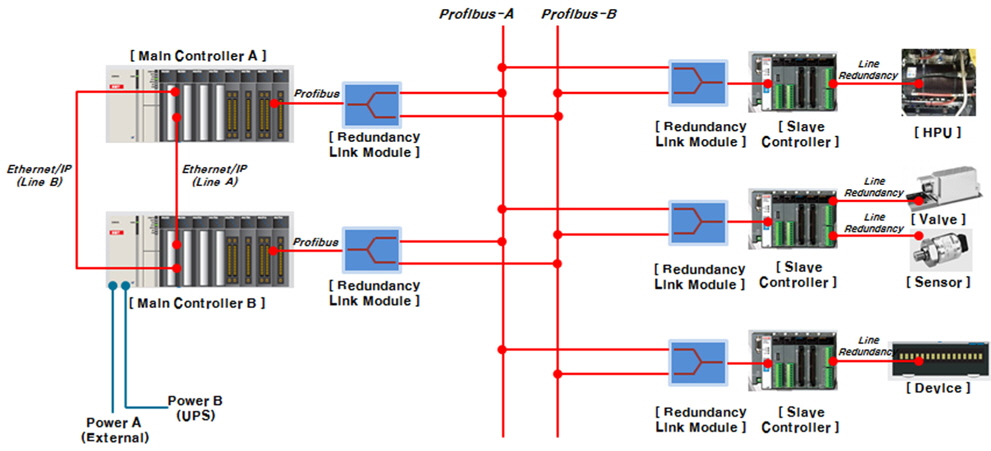
중작업용 수중건설로봇 플랫폼의 유압제어부의 주 제어기는 이중화된 Hot standby redundancy로 구성하였다. 설계 기준으로는 Hot standby redundancy에서 발생할 수 있는 전원공급부실패(Common mode failure)에 대한 보완 및 비상 상황 발생 시 처리, 전환 시 발생할 수 있는 데이터 손실을 최소화하여야 한다. 먼저 전원공급부 실패(Common mode failure)에 대한 대책으로는, 주 제어기의 전원 소스를 외부 전원과 내부 배터리로 병렬화 하였고, 외부 전원 인입부에 서지 보호 장치를 배치하여 제어기를 보호할 수 있도록 하였다. 내부 배터리는 외부로부터의 전원 입력에 문제가 발생 시 이를 감지하여 내부 전력을 사용하도록 전환되고, 비상 상황으로 간주하여 주 제어기의 시스템의 종료 처리, 예를 들어 밸브의 스풀 위치 초기화 및 상태 기록, 하드웨어 종료 작업 진행 등을 실행하기 위한 용도로 사용된다.
주 제어기 간에는 Ethernet/IP에 의한 링 토폴로지를 구성하여 동기화 및 제어권 결정을 수행하기 위한 통신 선로를 구축하며, 주 제어기로부터 부 제어기와의 통신은 대역폭이 크고 노이즈에 강인한 Profibus 산업 표준 통신 방식을 채택하여, Profibus DP 통신 모듈을 분배기를 통해 이중화된 버스 라인과 연결한다. Profibus 통신 선로 중 일부가 단선 등의 문제가 생기더라도 다른 예비 선로를 통해 분배기에서 선로 선택을 전환하여 운용이 연속되도록 설계하였다(Fig. 6).
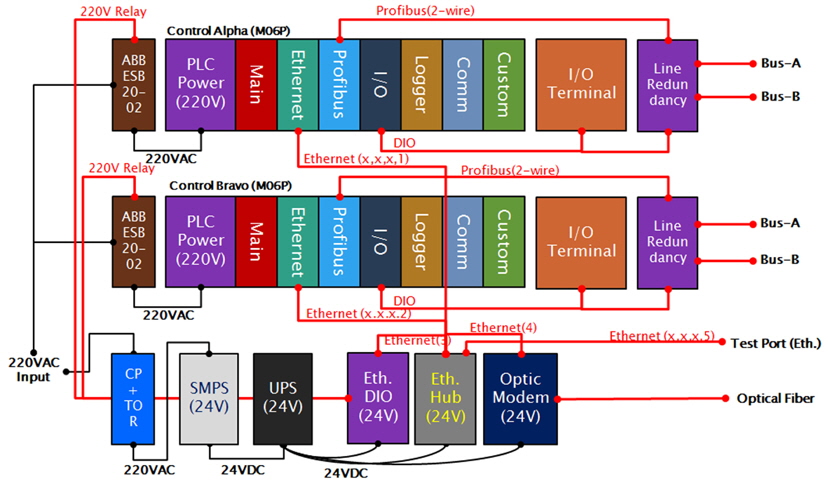
2.4 주 제어 전장부 구성
주 제어 전장부는 수심 500미터 내외에서 동작 가능하도록 두 개의 내압용기 내에 설치하며, 주 제어기와 모니터링 장치, 통신 분배기, SMPS(Switched-mode power supply), UPS(Uninterruptible power supply), 통신 허브 등의 전장을 복수로 구성한다.
전원과 신호선은 내압용기의 수중 커넥터를 통해 연결되며, 외부 전원은 플랫폼 내 전압변환기로부터 220V 교류 전원이 인입되어 내압용기 내부의 SMPS를 통해 직류전압으로 변환되어 사용된다. 외부 전력 단절 시 사용하기 위한 내부 배터리는 UPS와 공용하도록 하고 있다. 신호선은 슬레이브 단과의 통신을 위한 두 개의 Profibus 라인과, 제어기와 모니터링 장치에 연결되는 세 개의 광 라인이 있으며, 광 라인은 멀티플렉서에의 해 하나로 합하여 라인 수를 줄이는 것이 가능하다.
주 제어기는 동일한 두 내압용기 내의 제어기 컴포넌트가 동시에 실행되고 상호 동작 감시를 하여 능동적으로 주 제어권을 전환하는 것이 가능하도록 하였다. 각 내압용기 내에는 주 제어기 컴포넌트의 동작 상태를 전달하고 각종 데이터를 저장하기 위한 모니터링 및 로깅 모듈을 배치하였다. 모니터링 모듈은 선상의 제어실과 연결되어 제어기의 정보를 제공하는 역할을 하며, 로봇 플랫폼의 제어 및 동작 상태의 기록을 위한 데이터 로깅 모듈은 100Hz의 주기로 별도의 저장장치로 데이터를 저장하도록 하고 있고, Lee et al.(2014)가 제안한 로봇 플랫폼의 상태 예측 알고리즘 및 파라미터 분석 방법의 구현을 위해 실시간으로 수집된 데이터를 제공하는 역할을 하게 된다.
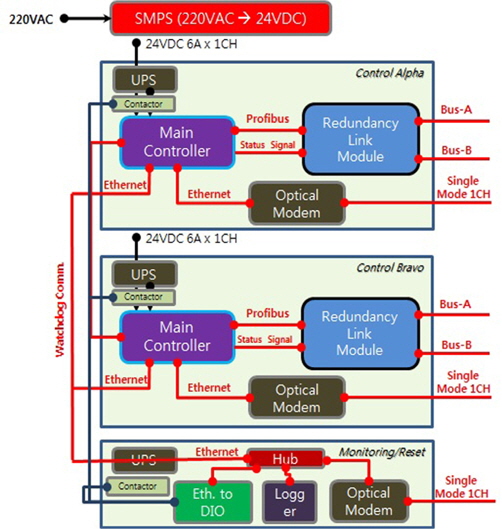
주 제어 전장부의 배치는 아래와 같으며, 이중화된 Hot standby redundancy 구성으로 동일한 제어기 및 전원 관련 컴포넌트들을 복수로 배치 하여 결선하도록 하고 있다. 제어기의 동작 실패 등의 상황에서 복구하기 위해서 전원부 릴레이 및 리셋 모듈을 적용하고 있다.
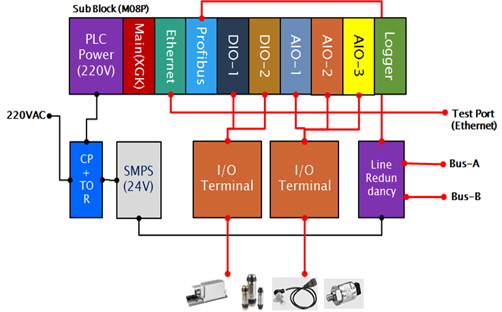
2.5 부 제어 전장부 구성
중작업용 수중건설로봇 플랫폼의 제어 밸브 및 센서는 압력 보상식(Oil-compensated)의 밸브팩 내에 집적하여 구성하도록 하고 있으며, 부 제어기는 제어 및 센서 신호 전달의 최적화를 위해 밸브팩 내에 내압용기를 구성하여 배치한다.
부 제어기의 전장부는 신호 입출력 모듈을 복수화하여 배선이중화된 회로를 통해 밸브와 센서 등의 하드웨어와의 배선을 중복하여 연결한다. 부 제어기의 내압용기는 외부 결선에 소요되는 커넥터가 많이 소요되므로 내부 전장 공간을 최소화하도록 요구 사양에 최적화된 하드웨어의 선정 및 배치가 필요하다.
3. 결 론
중작업용 수중건설로봇은 심해 환경에서 케이블 매설 및 암파쇄 등의 작업을 수행하기 위한 로봇 플랫폼으로 유압 구동을 위한 HPU 및 제어기를 플랫폼에 내장한다. 로봇 시스템의 동작 안정성 향상을 위한 설계에서 고려하여야 할 사항을 관련 연구를 통해 도출하였으며, 전장 제어기 및 통신, 배선의 다중화 방식을 적용하여 주 제어 전장부 및 부 제어 전장부를 설계하였다.
전장 제어기는 이중화 구성을 적용하여, 동일한 규격의 두 컴포넌트를 Hot standby의 구성으로 주 컴포넌트와 예비 컴포넌트를 동시에 실행하여 장애 발생 시 즉시 전환되도록 설계하였다. 주 제어기와 부 제어기 간의 통신은 여러 산업용 표준 중대역폭이 크고 노이즈에 강인한 Profibus 방식을 채택하여 적용하였으며, 통신 선로를 이중화하고 분배기를 통해 선로 손상 등의 문제를 즉시 감지하여 절체 전환할 수 있도록 하였다. 부 제어기의 유압 제어 밸브 및 센서 등의 하드웨어 요소에 대한 디지털 및 아날로그 신호 라인에 대해서도 물리 채널에 대한 배선 다중화 회로를 설계하였다.
향후에는 주 제어기 및 부 제어기의 설계를 시험 구현하고 운용 소프트웨어를 개발하여 배선 이중화 및 제어 이중화의 동작 성능을 평가하고자 한다.




