심해무인잠수정 해미래를 이용한 다중빔 음향측심기의 운용 - 마리아나 열수해역 탐사 결과 및 후처리 -
Multi-beam Echo Sounder Operations for ROV Hemire - Exploration of Mariana Hydrothermal Vent Site and Post-Processing
Article information
Abstract
This paper presents the operations of a multi-beam echo sounder (MBES) installed on the deep-sea remotely operated vehicle (ROV) Hemire. Hemire explored hydrothermal vents in the Forecast volcano located near the Mariana Trench in March of in 2006. During these explorations, we acquired profiling points on the routes of the vehicle using the MBES. Information on the position, depth, and attitude of the ROV are essential to obtain higher accuracy for the profiling quality. However, the MBES installed on Hemire does not have its own position and depth sensors. Although it has attitude sensors for roll, pitch, and heading, the specifications of these sensors were not clear. Therefore, we had to merge the high-performance sensor data for the motion and position obtained from Hemire into the profiling data of the MBES. Then, we could properly convert the profiling points with respect to the Earth-fixed coordinates. This paper describes the integration of the MBES with Hemire, as well as the coordinate conversion between them. Bathymetric maps near the summit of the Forecast volcano were successfully collected through these processes. A comparison between the bathymetric maps from the MBES and those from the Onnuri Research Vessel, the mother ship of the ROV Hemire for these explorations, is also presented.
1. 서 론
선박해양플랜트연구소에서는 해양수산부의 지원으로 국내 최초로 심해용 무인잠수정 해미래를 개발하였다(Lee et al., 2007). 해미래는 최대 6,000m까지 잠수가 가능하며 광학카메라 및 이미징 소나 등을 이용하여 심해 환경 및 생태계를 관측할 수 있고, 매니퓰레이터를 이용하여 퇴적물 및 생물의 채집을 할 수 있다. 개발 완료 단계인 2006년에는 서태평양 필리핀해역(20°34' N, 130°40' E)에서 수심 5,775m까지 잠항하여 그 성능을 입증하였다. 초기 개발 이후에는 주로 동해 탐사에 투입되어 왔으며, 2015년 탐사에서는 지금까지 개선되어 온 무인잠수정 플랫폼에 대한 전반적인 성능 시험과 심해 영상 취득, 경사면 등의 특이지형, 육상폐기물 해양투기현황 조사 등을 수행했다(Kim et al., 2015a; Min et al., 2016).
다중빔 음향측심기(Multi-beam echo sounder, MBES)는 여러개의 음향 빔을 이용하여 수심을 측정하거나 지형을 조사하는데 유용하게 사용되는 장비이다. 선박 선저면에 장착하여 조사하는 경우에는 수심이 깊어질수록 해상도가 떨어지는 단점이 있다. 그러므로 좁은 지역이라도 정밀 관측이 요구되는 경우에는 해저면 근처에서의 근접 운용이 요구된다. 이런 경우에 있어 해미래와 같은 원격조종무인잠수정(Remotely operated vehicle, ROV)이나 자율무인잠수정(Autonomous underwater vehicle, AUV)에 음향측심기를 장착하여 운용하는 것이 그 대안으로 대두되었다.
미국 Monterey Bay Aquarium Research Institute(MBARI)에서는 MBES를 AUV Dorado에 장착했다(Kirkwood, 2007).이 플랫폼은 AUV 모드로 단독으로 운용될 수도 있고, ROV Ventana에 마운트되어 ROV 모드로도 사용될 수 있다. ROV 모드인 경우 모선과 연결된 엄빌리컬 케이블(Umnilical cable)로 인하여 행동에 제약을 받는 단점이 있지만, 즉각적인 피드백과 제어가 가능하게 된다. 이를 이용하여 Monterey Canyon 지역에 대한 해저 맵핑(Bathymetric mapping)을 성공적으로 수행했다. 효율적이며 정확한 계측에는 계측 순간의 MBES의 위치와 자세가 큰 영향을 미친다. ROV Jason에 장착된 다중빔 음향측심기를 이용한 동시적 위치추정 및 지도작성(Simultaneous localizatioin and mapping; SLAM) 기법에 관한 연구가 수행됐으며(Roman and Singh, 2005), Motion sensor를 이용하여 MBES의 오측자료 원인을 파악하고 제거할 수 있는 기법에 대한 연구도 진행됐다(Kang et al, 2010). 또한, MBES에 적절한 기울기를 줌으로써 계측 영역을 확대할 수 있는 방법이 제안되기도 했다(Park et al, 2011). 하지만 아직 국내에서는 AUV나 ROV를 이용한 MBES의 심해 운용 실적이 전무한 상황이다.
본 연구에서는 앞서 언급한 해미래 무인잠수정 시스템과 여기에 장착된 MBES의 운용과 그 결과를 소개하고자 한다. 일련의 실해역 탐사를 통해 그 성능이 검증된 해미래를 이용하여 태평양 괌 인근 마리아나 해저 화산 근처 열수 분출공에 대한 탐사를 수행하게 됐다(Lee et al, 2016). 2016년 3월 23일부터 4월 5일까지 14일의 일정으로 진행이 되었는데, 이 탐사를 통하여 열수분출공 수색 및 블랙스모크의 확인을 포함하여, 침전물 포집장치와 미끼어망의 설치 및 회수 임무 등을 성공적으로 수행하였다. 또한, MBES를 이용하여 열수분출공 주변 지역에 대한 프로파일링 포인트 데이터를 얻었다. 이는 국내에서 자체 개발된 심해 무인잠수정을 이용한 최초의 시도이다.
본 논문 구성은 다음과 같다. 2장에서는 ROV 해미래와 사용된 MBES 각각에 대한 소개 및 인터페이스에 대해 설명한다. MBES는 자체 위치 센서가 없기 때문에 프로파일링 포인트 측정 순간의 위치 및 자세를 해미래로부터 전달 받도록 했다. 또한, MBES와 잠수정 각각의 좌표계 및 두 좌표계 사이의 관계를 모델링하여 MBES에서 취득한 프로파일링 포인트가 지표 고정 좌표계에 대응될 수 있도록 했다. 3장에서는 MBES의 데이터와 해미래의 데이터를 동기화시키는 후처리 과정을 설명한다. MBES는 해미래로부터 전달 받은 위치 및 자세 데이터와 자신이 측정한 프로파일링 포인트 데이터를 함께 저장하게 되는데 통신 속도 및 안정성 때문에 별도의 동기화 과정이 요구되었다. 4장에서는 마리아나 열수해역에서 얻어진 MBES 프로파일링 데이터의 수집 및 후처리의 결과를 소개한 후 5장에서 결론을 맺도록 한다.
2. 해미래와 다중빔 음향측심기
2.1 심해무인잠수정 해미래
본 탐사에 활용된 해미래는 수심 6,000m까지 잠항 가능한 무인잠수정으로 2개의 로봇팔(Manipulator), 다수의 조명과 광학카메라, 이미징 소나, USBL(Ultrashort baseline) 리스폰더(Responder) 등을 장착했다(Fig. 1). 성능 사양은 Table 1에 정리하였다. 실제 운용에서는 수중진수장치(Depressor)인 해누비와 함께 운용되며 이를 통해 모선의 거동을 상쇄시켜 해미래가 안정적인 항해를 할 수 있도록 한다. 개발 초기 아날로그 타입의 영상시스템은 디지털 타입의 HD 카메라 시스템으로 개선됐으며(Baek et al, 2014; Baek et al, 2015), 심해 탐사를 위해 요구되는 임무들에 대해 효과적으로 대응하기 위하여 시스템 확장을 위한 연구가 수행됐다(Kim et al, 2015b). 이번 탐사에서는 지자기 센서, 침전물 포집 장치(Sediment trap), 통발(Bait trap), 채수기 등을 필요에 따라 장착해 가며 다양한 임무를 수행하였다.

Deep-sea ROV HEMIRE
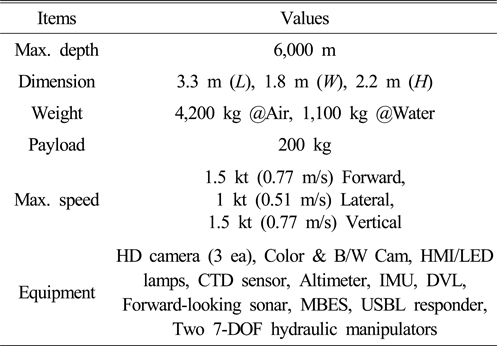
Specifications of the HEMIRE
2.2 MBES(다중빔 음향측심기)
MBES는 다수의 빔을 일정한 간격을 두고 방사하여 전방 물체 등을 조사하는 장비로 해저 지형 계측에 널리 활용되고 있다. 본 연구에서 사용된 음향측심기는 Kongsberg Mesotech의 제품으로 모델명은 M3이며, 본 장비 사양을 Table 2에 요약하였고, Fig. 2에 나타내었다. M3 MBES는 이미징 모드(Imaging mode)와 프로파일링 모드(Profiling mode) 모두 가능하며 500kHz의 256개의 빔을 이용한다. 내부에는 횡동요(Roll)와 종동요(Pitch)를 계측하는 자세센서와 선수동요(Yaw)를 계측하는 방향센서가 탑재되어 있다. 하지만 위치 및 심도 계측을 위한 센서는 없기 때문에 외부로부터 입력이 필요하다.
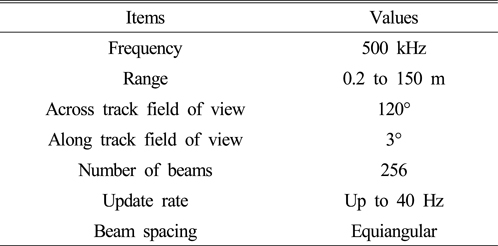
Specifications of M3

Multi-beam Echo Sounder – M3 (Image from www.km. kongsberg.com)
2.3 시스템 통합 및 인터페이스
MBES는 해미래 선미에 Fig. 3과 같이 장착되어 하방을 바라보도록 하며, 대지 속도를 계측하는 Doppler velocity logger(DVL)와 나란하게 설치하였다. 해미래의 선두에는 툴슬레이드, 로봇팔 및 다수의 조명과 광학카메라가 배치되어 있어서 MBES가 하방을 바라보도록 장착하기가 어려웠다. 다중빔이 형성하는 프로파일링의 해상도는 해미래의 고도와 밀접하게 연관된다. 해미래의 고도가 낮을수록 빔 간 간격은 좁아지며 해상도는 향상된다. 하지만 주사폭(Swath width: S)은 좁게 되어 한 번의 항주로 조사할 수 있는 영역이 적어지게 된다. 반대로, 고도가 높아지면 빔 간 간역이 넓어지며 해상도는 저하되나, 주사폭은 넓어진다. M3 음향측심기는 총 256개의 빔을 120° 폭으로 방사하므로 빔 간 간격은 대략 0.47°가 된다. 그러므로 지면이 평지인 경우에 한하여 음향측심기의 고도(h)에 따른 주사폭(S)은 식 (1)과 같이 계산이 되며, Fig. 4와 같이 도해할 수 있고, 결과적으로 각 빔의 간격(s)과 이에 따른 해상도 역시 알 수 있다.

Multi-beam Echo Sounder on the stern of the Hemire
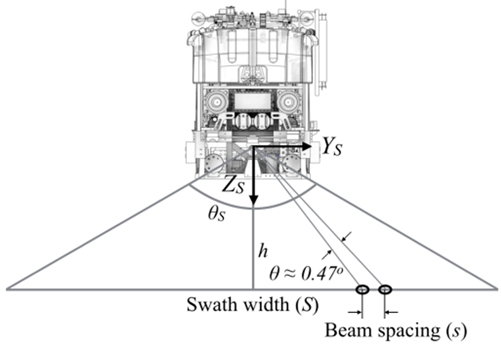
Swath width and altitude of the Hemire

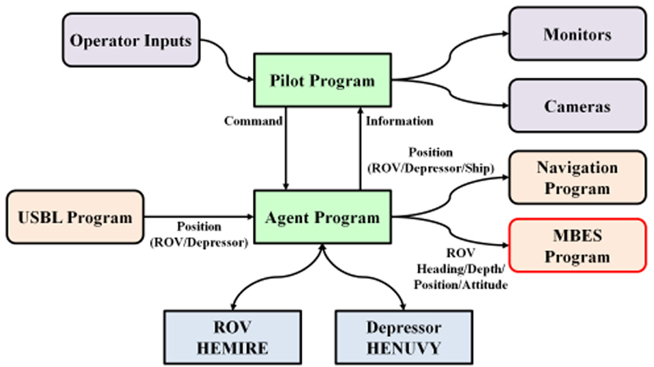
Fig. 5는 MBES를 포함한 해미래의 시스템 블록선도이다. 이더넷 인터페이스를 제공하는 MBES는 해미래의 비디오 제어 내압용기(Video control canister)와 저압 내압용기(Low voltage canister)를 거쳐 광통신으로 선상제어실과 연결된다. 선상제어부(Remote control unit)의 블록선도는 Fig. 6에 도시하였다. 광통신을 통해 해미래로부터 올라오는 데이터는 이더넷 통신으로 다시 변환되며 이더넷 스위치를 통해 MBES 제어 컴퓨터를 비롯한 여러 컴퓨터에서 접근할 수 있도록 했다(Kim et al, 2014). 이 중 MBES 제어 컴퓨터는 RS-232 통신을 이용하여 에이전트(Agent) 컴퓨터로부터 해미래의 위치, 자세, 심도, 방향 정보를 전달 받는다. 전달 주기는 전체적인 시스템 성능을 고려하여 1Hz로 설정하였고, 이 정보들은 MBES가 취득한 프로파일링 데이터 및 MBES에 내장되어 있는 자세 센서 데이터와 함께 저장된다. 하지만, 비교적 느린 통신 주기 때문에 해미래 데이터와 MBES결과를 동기화시켜줄 별도의 과정이 요구되었다. Table 3에 에이전트로부터 전달 받는 데이터의 종류와 형식을 나타내었다.

Communication block diagram of the Hemire
Communication block diagram of the Remote Control Unit
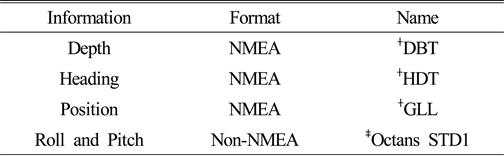
Data from Hemire to the M3
2.4 좌표계
본 연구를 위해 세 개의 좌표계를 도입하였다. 해미래에 장착된 음향주사기에 고정된 센서 좌표계(YS-ZS coordinate), 해미래 선체 고정 좌표계(XR-YR-ZR (Body-fixed) coordinate) 및 지표 고정 좌표계(X-Y-Z (Earth-fixed) coordinate)이며 Fig. 7과 같이 설정하였다. 이 때, 지표 고정 좌표계는 UTM(Universal transverse mercator) 좌표계와 일치시켰다. 한 좌표계에서의 한 점의 위치를 다른 좌표계에서 나타내고자 할 때에는 동차변환행렬(Homogeneous transformation matrix)을 이용해 표현할 수 있다(Spong and Vidayasagar, 1989). 이를 적용하면 센서 좌표계는 선체 고정 좌표계에 대하여 회전변화는 없고 이격만 되어 있으므로 센서 좌표계에서 바라본 k번째 빔의 좌표 SPk는 MBES에서 도출되는 최초의 형식이며 선체 고정 좌표계에 대하여 식 (2)로 표현할 수 있다.

Coordinate systems

여기서,

이 때, d(Fig. 7)는 선체 고정 좌표계 원점에서 센서 고정 좌표계 원점을 가리키는 벡터이며 3D설계 모델에서 도출하였고 아래와 같다.

그리고, 해미래 선체 고정 좌표계는 지표 고정 좌표계로부터 EPR 만큼 떨어져 있고, 동시에 종동요(Roll, ϕ), 횡동요(Pitch, θ), 선수동요(Yaw, ψ) 만큼 회전되어 있다. 그러므로 RPk는 식 (5)를 이용하여 지표 고정 좌표계 상에서 표현할 수 있다.

여기서, EHR과 Rψθϕ은 아래와 같다.

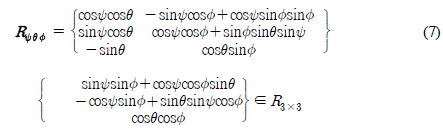
이 때, EPR은 지표 고정 좌표계의 원점에서 바라본 선체 고정 좌표계까지의 벡터이다. 식 (2)와 식 (5)를 통합하면 센서 좌표계의 한 점을 식 (8)을 이용하여 지표 고정 좌표계에서 나타낼 수 있다. 즉, 식 (8)에 의해 음향측심기에서 계측한 k번째 빔의 좌표 SPk는 지표 고정 좌표계에서 EPk로 표현된다.

3. 음향측심 데이터의 후처리
3.1 음향측심 데이터 취득 및 후처리의 필요성
프로파일링 포인트를 지표 고정 좌표계 상에 정확하게 매핑하기 위해서는 선체의 정확한 위치, 심도, 방향, 자세 등을 반영하여야 한다. 이러한 선체의 정보는 앞서 언급한 해미래의 에이전트 컴퓨터에 저장되고 전체 시스템 성능 유지를 고려하여 1초에 한 번씩 MBES 제어 컴퓨터로 송신시켰다. MBES 제어 컴퓨터에서는 이를 받아 MBES가 취득한 프로파일링 포인트 데이터와 함께 하나의 패킷을 구성하여 저장하게 된다. 하지만, 이런 경우, MBES의 프로파일링 포인트 취득은 고도에 따라 달라지긴 하지만 최대 40Hz로 수행될 수 있기 때문에, 1Hz의 통신 주기는 패킷에 저장된 센서 고정 좌표계 상의 포인트들을 지표 고정 좌표계로 변환하는 과정에서 실제 측정 당시의 위치 및 자세와 불일치를 유발할 수 있다. 이러한 점을 보완하기 위한 후처리 과정을 고안하였고, 본 연구에서는 이러한 과정을 패칭(Patching)이라 하겠다. 즉, 1Hz로 MBES에 전송된 데이터가 해미래 에이전트 컴퓨터에 저장된 전체 데이터 타임라인(Timeline)에서 어느 시점에 해당하는지를 찾고, 해미래 에이전트 컴퓨터에 저장된 정보로 동기화하는 과정인 것이다.
3.2 후처리 과정
본 절에서는 후처리 과정 및 결과를 설명하도록 한다. 동기화를 위한 후처리의 목적은 해미래에 저장된 데이터의 타임라인에서 MBES의 데이터 타임라인이 겹치는 부분을 찾는 것이다. Fig. 8에 10Hz로 저장되는 해미래 데이터 타임라인은 단순화를 위해 곡선으로 표현했고, 1Hz로 저장되는 MBES 데이터는 구분적 불연속선으로 표현하였다. MBES의 데이터 타임라인에서 갱신된 값들을 해미래 데이터 타임라인에서의 값들과 비교하여 각각의 오차(식 (9), ek) 및 이 오차들의 평균 제곱근(식 (10), E)을 계산한다. 이런 과정을 데이터가 저장되기 시작한 시각부터 ts를 증가시키며 반복하고, E가 최소가 되는 ts를 해당 구간의 시작 시각(tstart)로 취하였다. 그 후, 다른 데이터와의 교차 비교를 통하여 겹치는 부분이 제대로 찾아졌는지 확인하였다.
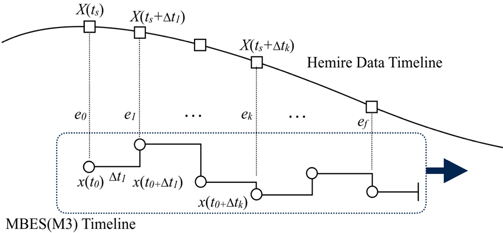
Timelines of Hemire data and MBES data


하지만, MBES 제어 컴퓨터에 저장된 데이터를 조사하는 과정에서 1Hz 통신이 제대로 이루어지지 않았다는 문제를 발견하였고, 1초 주기의 불연속을 보이는 것이 아니라 더 긴 시간 동안 신호를 받지 못 한 결과를 보여주었다. 1Hz가 충실히 지켜졌다면 원으로 표시(Fig. 8)한 데이터 값의 간격이 1초로 균일해야 했지만, 실제 데이터는 그러지 못 했던 것이다. 더구나, 2장 Table 3에서 설명한 바와 같이 네 종류의 데이터를 보냈으나, 불규칙하게라도 어느 정도 통신이 이루어진 데이터가 있는 반면, 통신 자체가 제대로 이루어지지 못 한 데이터가 존재했다. 이를 4장에서 설명하도록 한다.
4. 실해역 탐사 데이터의 수집
4.1 탐사 개요
본 연구에 기술된 탐사는 2016년 3월 23일 괌 APRA항에서 출항하는 것을 시작으로, 수심 1,500m의 Forecast 해저화산 지역과 수심 3,000m 내외의 Archaean 열수분출공 지역을 탐사하고 4월 5일에 괌 APRA항으로 귀환하였다. 탐사목적으로는 총 9번의 다이빙이 수행되었으며 침전물 포집 장치를 비롯한 통발 등의 설치 및 회수를 포함하여, 채수(Water sampling), 자기장 측정, 암석 및 토양의 채취 등을 수행하였다(Lee et al, 2016). 본 절에서는 9번의 다이빙 중 Forecast 해저화산에서 수집된 두 번의 음향측심 데이터 및 후처리에 대하여 기술한다.
Forecast 지역은 Fig. 9와 같고, 연구선 온누리호의 MBES로 수집한 데이터를 Fig. 10에 표시하였다. 해미래는 50m 고도에서 탐사모드로 전환하면서 해저면에 근접하게 된다. 해당 수심에서의 음속도를 알고 있으면 보다 정확한 계측이 가능하겠으나, MBES와 해저면 간의 거리가 상대적으로 매우 짧기 때문에 큰 영향은 없을 것으로 가정했다. 광학카메라를 이용해 관측한 Forecast 정상 부근은 매우 울퉁불퉁한 화산암으로 이루어져 있어서 음파 반사에 불규칙한 영향을 주었을 것으로 예측됐다(Fig. 11). Table 4에 탐사데이터를 요약하였다.

Forecast Volcano near Guam (Image from http://oceanexplorer.noaa.gov)

Images of Forecast Volcano from the Multi-beam Echo Sounder of Onnuri R/V

Seafloor near Forecast volcano
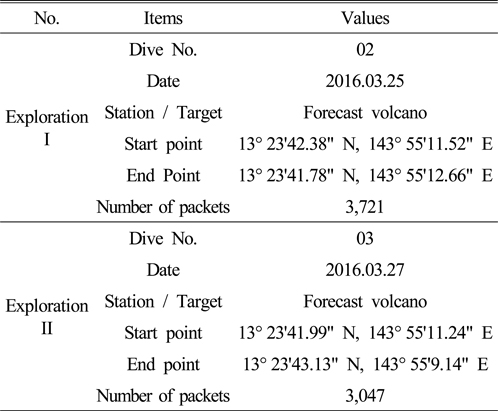
Summary of Forecast volcano explorations of the Hemire using the M3 MBES
4.2 데이터 수집 및 후처리 결과
후처리의 수행은 다음의 순서로, (1) MBES에 저장된 위치, 심도, 방향, 자세 데이터를 검토하고 갱신 상태가 제일 양호한 것을 선택, (2) 선정된 데이터와 해미래에 저장된 해당 데이터에 식 (9)와 식 (10)을 적용하여 시작 시각(tstart)의 검출, (3) 선정되지 않은 다른 데이터에 대해서도 검출된 시작 시각(tstart)이 유효한지 검토, (4) 해미래의 데이터로의 동기화 패칭 작업 순으로 진행하였다.
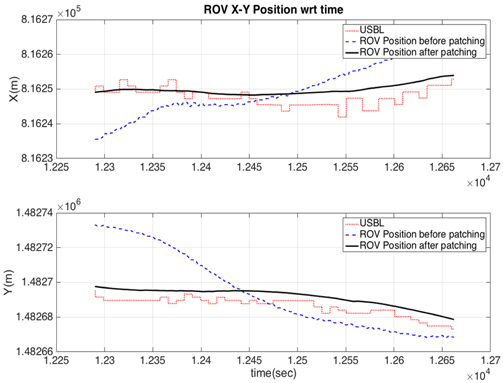
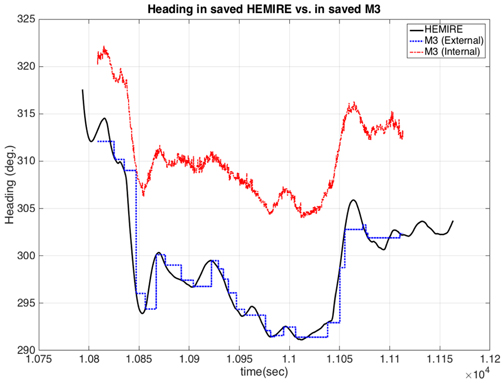
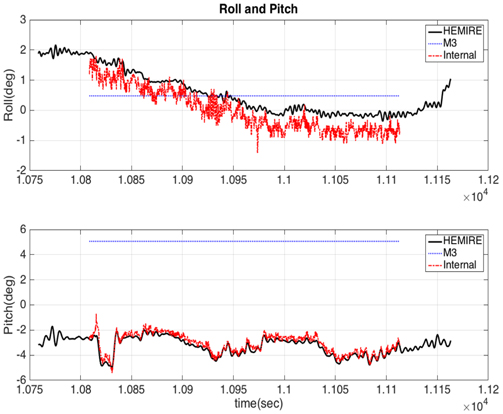
탐사 (I)에서 수집된 MBES 데이터 패킷의 심도, 방향, 자세, 위치 데이터 등을 검토한 결과 두 가지 문제가 있었다. 첫째는 데이터가 1초 간격으로 에이전트 컴퓨터에서 MBES 제어 컴퓨터로 제대로 전달이 안 되어, 1Hz로 갱신이 균일하게 이루어지지 않았다는 점이다. 그나마 심도 센서 데이터와 위치 데이터의 갱신 상태가 양호했으며, 방향 데이터는 불규칙하며 느린 갱신을 보였다. 자세 데이터의 경우는 프로파일링하는 동안 한 번도 갱신되지 못 했다. 둘째는 운용 프로그래밍 오류로 인해 해미래의 위치 정보가 아닌 모선의 위치 정보가 전달됐다는 것이다. 이런 이유로 갱신 상태가 제일 양호한 심도 데이터를 이용하여 후처리하였다. Fig. 12a는 해미래 심도 데이터 타임라인(청색 점선) 상에서 후처리를 통해 찾은 tstart에 MBES에 저장된 심도 데이터(흑색 실선)를 겹쳐 나타낸 것인데 그 경향이 일치하는 것을 볼 수 있다. 확대해 보면 심도 데이터 역시 1Hz보다는 느린 빈도로 갱신된 것을 알 수 있었다(Fig. 12b). 방향 데이터 타임라인은 Fig. 13에 나타내었다. 흑색 실선이 해미래 데이터, 청색 점선이 MBES에 저장된 데이터, 적색 파선은 MBES 내부 방향 센서 데이터이다. MBES에 저장된 데이터는 불규칙한 시간 지연을 갖고 갱신된 것을 볼 수 있다. 마찬가지로 심도 데이터 비교를 통해 찾은 tstart부터 겹쳐서 검토한 결과 MBES 내장 방향 센서 데이터와 해미래 데이터 간에는 어느 정도 옵셋은 존재하지만 변화 유형은 유사하다는 것을 확인했다. 해미래에 설치된 방향 센서는 iXSea사의 OCTANS Subsea 6000모델로 ±0.1° 이하의 매우 정밀한 성능을 내어 주는 모델(Lee et al., 2007)이며 이 센서 데이터가 수중 항법 알고리즘 수행에 이용된다. 하지만, MBES에 내장된 방향 센서의 성능 사양을 알려지지 않았고, 고성능의 센서라고 보기에는 어렵기 때문에 패칭 과정에서는 해미래의 방향 센서 데이터를 사용하였다. Fig. 14는 횡동요와 종동요를 계측한 자세 센서 데이터를 보여주는데, MBES 제어 컴퓨터에 저장된 데이터(청색 점선)을 관찰한 결과 프로파일링 도중에는 한 번도 갱신이 되지 않았다. 하지만, 앞서 도출한 tstart를 기준으로 MBES 내장 자세 센서 데이터(적색 파선)과 해미래의 자세 데이터(흑색 실선)를 비교해보면 그 경향이 일치하는 것을 다시 한 번 확인할 수 있었다. 자세 데이터인 경우에도, 성능 사양이 알려지지 않은 MBES 내장 자세 센서 데이터는 무시하였고, 해미래의 자세 센서 데이터를 최종적으로 이용하였다. 위치 데이터의 경우에는 모선의 위치 정보(Fig. 15의 청색 파선)가 전송되었는데, 갱신 자체는 양호한 것으로 보인다. 해미래의 수중 위치는 수중복합항법(Lee et al, 2015)을 이용하여 추정했으며, 이 데이터(흑색 실선)를 이용하여 패치하였다. 적색 점선은 USBL 위치 측정 장치의 데이터로 MBES에 저장되는 값이 아니며, 이 USBL 위치 데이터에서 보이는 불연속성은 해미래와 MBES간 통신과는 상관없는 것으로 USBL 장치의 특성이다.
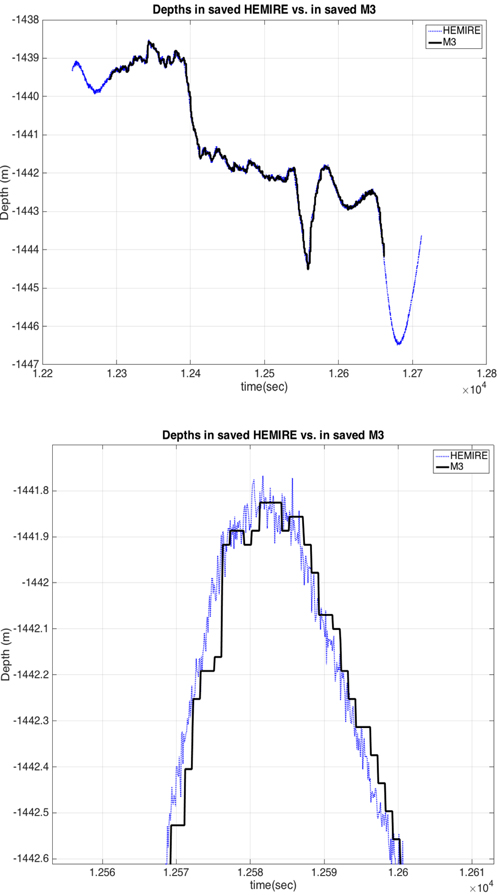
Depth data with respect to time- (a) Full range, (b) Zoom-in

Heading data with respect to time

Attitude data with respect to time - [Upper] Roll, [Lower] Pitch
Position data with respect to time - [Upper] Longitude (UTM), [Lower] Latitude (UTM)
이렇게 패칭된 위치, 심도, 방향, 자세 데이터 및 프로파일링 포인트 데이터를 식 (8)에 적용하였고, 지표 고정 좌표계의 3차원 공간에 평면도(Top view)와 상시도(Perspective view)로 나타내었다(Fig. 16). 굵은 선은 해미래의 궤적이며, 북쪽에서 남쪽으로 항해하였다. 모선과의 이격거리 조정, 장애물 회피, 특이지형 관측, 수중항법 상의 아웃라이어 발생 등 여러 가지 이유로 인해 항해 궤적에는 꺾임이 존재한다. 해미래의 MBES에서 수집한 데이터를 온누리호에 장착된 MBES로 수집한 데이터(Fig. 10)와 비교를 해 보았다(Fig. 17). 경사 및 지형 등의 양상은 유사하게 나왔으나 전반적으로 포인트들의 심도에서 옵셋 오차가 있음을 확인하였다. 온누리호 MBES 포인트들의 격자 간격이 1m인 반면에 해미래 MBES 포인트는 훨씬 조밀하게 모여 있어 고해상도 지형 정보를 보여줄 수 있다. 다만, 한 번 항해에 측정할 수 있는 주사폭은 매우 좁으므로 넓은 면적을 조사하기에는 불리하다.

MBES Profiling results of Exploration (I) - (a) Top view, (b) Perspective view

Overlapped profiling points of Onnuri R/V MBES and Hemire MBES - Exploration (I)
Figs. 18-23은 탐사(II)에서 얻은 데이터이다. 후처리는 탐사(I) 데이터와 마찬가지로 갱신 상태가 양호했던 심도 센서 데이터를 이용하여 겹치는 구간이 시작하는 시각(tstart)을 찾아내었다(Fig. 18a). 확대한 구간을 보면 1초 또는 2초의 간격을 갖고 갱신됐음을 알 수 있다(Fig. 18b). 방향 데이터 및 자세 데이터 역시 앞서와 유사한 경향을 보였다(Figs. 19-20). 방향 데이터 갱신은 심도 데이터의 경우에 비해 불량했고, 자세 데이터는 탐사(II)에서도 전혀 갱신이 이루어지지 못 했다. 그러므로, 이 경우에도 방향과 자세 데이터는 해미래의 센서 데이터를 이용하여 동기화하였다. 위치 데이터 패치의 결과는 Fig. 21에 나타내었다. Fig. 22a와 22b에 지표 고정 좌표계에 대하여 최종적으로 얻어진 프로파일링 포인트 데이터의 평면도와 상시도를 나타내었다. 동쪽에서 서쪽으로 항해하며 데이터를 취득했고, 온누리호 MBES 데이터와 겹쳐 본 결과 탐사 (I)과 마찬가지로 지형 변화의 경향이 매우 유사함을 보였다(Fig. 23).
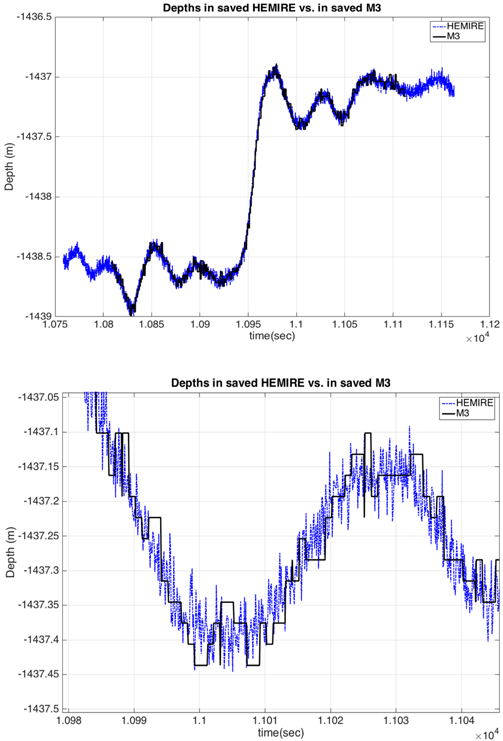
Depth data with respect to time - (a) Full range, (b) Zoom-in

Overlapped profiling points of Onnuri R/V MBES and Hemire MBES - Exploration (II)
Heading data with respect to time
Attitude data with respect to time - [Upper] Roll, [Lower] Pitch

Position data with respect to time - [Upper] Longitude (UTM), [Lower] Latitude (UTM)

MBES Profiling result of Exploration (II) - Dive 03: [Upper] Top view, [Lower] Perspective view
5. 결 론
본 논문에서는 심해 무인잠수정 해미래의 MBES를 이용한 해저면 탐사 및 데이터처리에 대해 기술하였다. 무인잠수정이 해저면에 근접하여 MBES를 운용하여 선상에서 운용하는 것에 비해 면적은 좁지만 훨씬 조밀한 프로파일링 포인트 취득이 가능했다. 해미래와 MBES의 인터페이스를 소개하였고, 수중에서 6자유도 운동을 하는 무인잠수정의 정보를 MBES로 전송하여 프로파일링 포인트 위치 계측에 반영되도록 하였다. 이를 이용하여 마리아나 열수해역 근처 Forecast volcano 정상 부근에서 MBES 데이터를 수집하였으며 후처리 및 좌표변화를 통해 프로파일링 포인트를 UTM좌표계에서 표현할 수 있었다. 이 후처리에서는 원본 데이터 프로파일에서 추출되어 별도 저장된 데이터 프로파일이 원본 프로파일 어디에 해당하는지를 도출하는 과정을 포함한다. 최종 후처리된 프로파일링 포인트 데이터와 온누리호에서 얻은 프로파일링 포인트 데이터와 비교를 해 보았고, 대략적인 지형 경향의 유사성을 확인하였다. 본 연구를 통해 자체기술로 제작된 ROV 시스템을 이용한 심해에서의 MBES 운용을 국내 최초로 수행할 수 있었고 이를 통해 고해상도의 해저 지형도를 획득할 수 있게 되었다.
보다 정확한 프로파일링을 위해서는 MBES와 ROV 간 통신 성능의 개선이 필수적이라 할 수 있겠다. 통신 불량의 원인을 파악하고, 왜 데이터 별로 통신 불량의 영향이 달랐는지에 대한 원인 파악 및 보완을 할 계획이다. 이와 별개로 ROV의 수중항법 성능 향상이 프로파일링 데이터 정확성을 높이는데 필수적이며, 카메라 영상 정보 등을 이용하여 선체의 표류(Drift) 운동을 추정하여 반영한다면 역시 정밀도 향상에 기여할 수 있을 것으로 본다. 적절한 자세 제어를 통해 계측 영역을 확장하는 것이 가능하다. 또한, 향후에는 수중에서의 정확한 위치를 알고 있는 랜드마크(Landmark)를 이용한 프로파일링 데이터의 보정을 통하여 위치 정확도를 향상시키고, 무인잠수정의 위치 추정(Localization) 등으로 연구 범위를 확장할 계획이다.
Acknowledgements
본 연구는 해양수산부에서 지원하는 “심해 유무인 잠수정 기술개발 및 운용인프라 구축 – 기술개발” 연구사업으로 수행된 연구결과의 일부임을 밝히며 연구비 지원에 감사드립니다.
References
Baek, S., Kim, B.H., Baek, H., Lee, P.M., Jun, B.H., 2014. Improvement of Video and Communication System for a Deep-sea ROV Hemire using Ethernet Fiber Optic Converter. Proceedings of the Fall Conference of the Korea Ocean Engineering Society, Jeju, 454-457.
Baek S., Kim B.H., Baek H., Lee P.M., Jun B.H.. Improvement of Video and Communication System for a Deep-sea ROV Hemire using Ethernet Fiber Optic Converter In : Proceedings of the Fall Conference of the Korea Ocean Engineering Society. Jeju; 2014. p. 454–457.Baek, S., Lee, P.M., Kim B.H., Baek, H., 2015. Operation of Video System for a Deep-sea ROV, Hemire. Proceedings of the Korean Association of Ocean Science and Technology Societies (KAOSTS) Conference, Jeju, 391-394.
Baek S., Lee P.M., Kim B.H., Baek H.. Operation of Video System for a Deep-sea ROV, Hemire In : Proceedings of the Korean Association of Ocean Science and Technology Societies (KAOSTS) Conference. Jeju; 2015. p. 391–394.Kang, M.K., Choi, Y.S., Chang, M.C., Yoon, H.S., 2010. A Study on MBES Error Data Removing using Motion Sensor. The Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, 28(1), 39-46.
Kang M.K., Choi Y.S., Chang M.C., Yoon H.S.. A Study on MBES Error Data Removing using Motion Sensor. The Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography 2010;28(1):39–46.Kim, B.H., Lee, G.M., Baek, H., Lee, P.M., Jun, B.H., 2014. Improvement of Operating Software for a Deep-sea ROV Hemire. Proceedings of the Fall Conference of the Korea Ocean Engineering Society, Jeju, 434-437.
Kim B.H., Lee G.M., Baek H., Lee P.M., Jun B.H.. Improvement of Operating Software for a Deep-sea ROV Hemire In : Proceedings of the Fall Conference of the Korea Ocean Engineering Society. Jeju; 2014. p. 434–437.Kim, B., Baek, H., Shim, H., Baek, S., Lee, P.M., Park, J.Y., Jun, B.H., Jeong, W.Y., Kang, H., Kim, W.S., 2015a. Seabed Exploration of the East Sea using a Deep-sea ROV, Hemire. Proceedings of the Fall Conference of the Korea Ocean Engineering Society, Daejeon, 434-437.
Kim B., Baek H., Shim H., Baek S., Lee P.M., Park J.Y., Jun B.H., Jeong W.Y., Kang H., Kim W.S.. Seabed Exploration of the East Sea using a Deep-sea ROV, Hemire In : Proceedings of the Fall Conference of the Korea Ocean Engineering Society. Daejeon; 2015a. p. 434–437.Kim, B., Lee, P.M., Baek, H., Baek, S., 2015b. Device Scalability of a Deep-sea ROV, Hemire. Proceedings of the Korean Association of Ocean Science and Technology Societies Conference, Jeju, 347-350.
Kim B., Lee P.M., Baek H., Baek S.. Device Scalability of a Deep-sea ROV, Hemire In : Proceedings of the Korean Association of Ocean Science and Technology Societies Conference. Jeju; 2015b. p. 347–350.Kirkwood W.J., 2007. Development of the DORADO Mapping Vehicle for Multibeam, Subbottom, and Sidescan Science Missions. Journal of Field Robotics, 24(6), 487-495.
Kirkwood W.J.. Development of the DORADO Mapping Vehicle for Multibeam, Subbottom, and Sidescan Science Missions. Journal of Field Robotics 2007;24(6):487–495. 10.1002/rob.20191.Lee, P.M. (Chief of research), et al., 2007. Development of an Advanced Deep-sea Unmanned Underwater Vehicle (1st Phase). KORDI Technical Report, UCM01240-07035.
Lee P.M. (Chief of research), et al. Development of an Advanced Deep-sea Unmanned Underwater Vehicle (1st Phase). KORDI Technical Report 2007.Lee, P.M., Kim, B., Shim, H., Baek, H., Baek, S.H., Park, J.Y., Jun, B.H., 2015. An Underwater Navigation System for an ROV integrated with Inertial Sensors and USBL Position Measurements. Proceedings of the Fall Conference of the Korea Ocean Engineering Society, Daejeon, 450-453.
Lee P.M., Kim B., Shim H., Baek H., Baek S.H., Park J.Y., Jun B.H.. An Underwater Navigation System for an ROV integrated with Inertial Sensors and USBL Position Measurements In : Proceedings of the Fall Conference of the Korea Ocean Engineering Society. Daejeon; 2015. p. 450–453.Lee, P.M., Jun, B.H., Baek, H., Kim, B., Shim, H., Park, J.Y., Yoo, S.Y., Jeong, W.Y., Baek, S., Kim, W.S., 2016. Explorations of Mariana Hydrothermal Vents in Southern Mariana Arc Submarine Volcanoes using ROV Hemire. Journal of Ocean Engineering and Technology 30(5), 389-399.
Lee P.M., Jun B.H., Baek H., Kim B., Shim H., Park J.Y., Yoo S.Y., Jeong W.Y., Baek S., Kim W.S.. Explorations of Mariana Hydrothermal Vents in Southern Mariana Arc Submarine Volcanoes using ROV Hemire. Journal of Ocean Engineering and Technology 2016;30(5):389–399. 10.5574/KSOE.2016.30.5.389.Min, W.G., Kim, J., Kim, W.S., Kim, D.S., Lee, P.M., Kang, J.H., 2016. Deep-sea floor exploration in the East Sea using ROV HEMIR. Journal of the Korea Academia-Industrial Cooperation Society, 17(4), 222-230.
Min W.G., Kim J., Kim W.S., Kim D.S., Lee P.M., Kang J.H.. Deep-sea floor exploration in the East Sea using ROV HEMIR. Journal of the Korea Academia-Industrial Cooperation Society 2016;17(4):222–230. 10.5762/KAIS.2016.17.4.222.Park, Y., Hong, J.P., Kong, S.K., 2011. Increasing Surveyed Area using Tilted Multi Beam Echo Sounder. Journal of the Korean Society of Civil Engineers D, 31(5D), 739-747.
Park Y., Hong J.P., Kong S.K.. Increasing Surveyed Area using Tilted Multi Beam Echo Sounder. Journal of the Korean Society of Civil Engineers D 2011;31(5D):739–747.Roman, C., Singh, H., 2005. Improved Vehicle Based Multibeam Bathymetry using Sub-maps and SLAM. IEEE/RSJ International Conference on Intelligent Robots and Systems, 3662-3669.
Roman C., Singh H.. Improved Vehicle Based Multibeam Bathymetry using Sub-maps and SLAM In : IEEE/RSJ International Conference on Intelligent Robots and Systems; 2005. p. 3662–3669.Spong, M.W., Vidayasagar, M., 1989. Robot Dynamics and Control. John Wiley & Sons, Inc., New York, NY, USA.
Spong M.W., Vidayasagar M.. Robot Dynamics and Control John Wiley & Sons, Inc.. New York, NY, USA: 1989.