


1. 서 론
수중로봇은 크게 운용자와 케이블로 연결되어 전원공급, 통신, 제어가 가능한 유삭식 수중로봇(ROV, Remotely operated vehicle)과 외부와의 연결 없이 자체 전원과 항법, 제어를 필요로 하는 무삭식 수중로봇(AUV, Autonomous underwater vehicle)으로 나뉜다. 무삭식 수중로봇의 경우 자율성을 필요로 함에 따라, 보다 고도화된 기술을 필요로 한다. 수중로봇 기술은 선체기술, 추진기술, 수중통신기술, 에너지개발기술, 항법기술, 자율제어기술, 센서기술 등으로 분류할 수 있다.
항법 기술은 임의의 한 점에서 다른 한 점으로 이동하기 위해 수중로봇의 속도, 위치, 자세와 같은 수중로봇의 거동에 관한 정보를 제공하는 기술을 말한다. 수중로봇의 진수 및 회수는 물론, 수중로봇을 이용하여 해양탐사, 해저지형도(Bathymetric chart) 작성, 해양 및 해저플랜트의 건설 및 유지보수, 기뢰탐색 및 제거, 대잠전 등의 임무를 수행하기 위해 지구고정좌표계에 대한 정확한 위치 및 자세 정보를 제공하는 항법 기술이 필요하다
항법 기술은 사용하는 센서와 적용방법에 따라 다양하게 분류된다. 수중로봇의 항법 기술은 주로 관성측정 장치(IMU, Inertia measurement unit)를 주센서로 사용하고 자기컴퍼스(Magnetic compass), 도플러 속도계(DVL, Doppler velocity logger) 그리고 위성항법시스템(GPS, Global positioning system) 등을 보조센서로 사용하는 추측항법(Dead reckoning), LBL(Long baseline), SBL(Short baseline), USBL(Ultrashort baseline)과 같은 음향 시스템을 사용하는 음향 항법(Acoustic navigation), 해저지도(Bathymetry map)와 자기장 지도(Magnetic field map)를 이용한 지구물리학적 항법(Geophysical navigation), 그리고 2가지 이상의 항법시스템을 융합한 복합항법으로 나눌 수 있다(Paull et al., 2014).
수중로봇 운용 시 외부와의 통신으로 위치를 측정하기 어렵다는 환경적인 제약조건 때문에 수중로봇은 추측항법에 의존하여 위치를 추정하는 것이 일반적이다. 추측항법의 경우 시간이 지남에 따라 위치오차가 누적되는데, 이를 극복하기 위해 보조적으로 GPS, 주변 지형지물을 이용한 대조항법, 속도보정장치 등을 이용한 통합항법에 관한 연구가 다양하게 수행되고 있다(Lee et al., 2003, Lee et al., 2004, Yoo et al., 2013). 그 중 수중로봇에 GPS를 적용하는 연구들은 보통 수상에서의 평면 운동으로 한정하여 GPS를 사용하거나, 수상 부상 시 무인잠수정의 누적 위치오차를 보정하기 위해 GPS를 사용하는 등 수중로봇에서 GPS의 활용도는 그다지 높지 않다(Choi et al., 2014, Park et al., 2015).
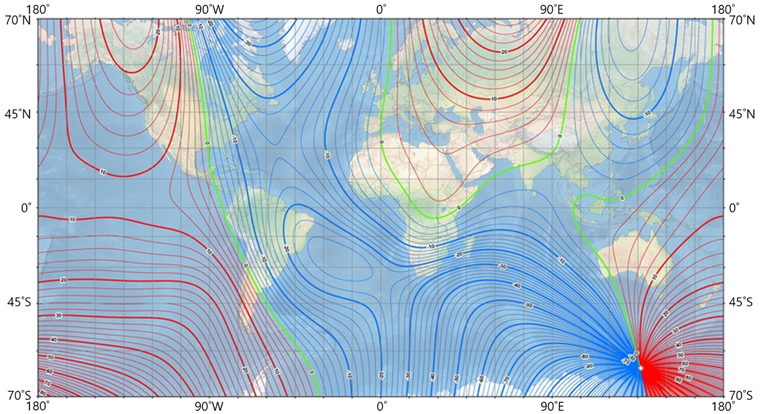
각 항법들은 수중로봇이 동일한 경로로 거동하더라도 기준이 되는 좌표계에 따라 얻어지는 위치정보가 상이하여, 각 항법의 성능을 비교하거나 통합항법을 구현하기 위해서는 기준이 되는 좌표계를 일치시킬 필요가 있다. 자기컴퍼스를 사용하는 항법은 자편각(Declination)을 고려해야 한다(Fossen, 2011). 이를 위해 Fig. 1의 자편각 지도에 표기된 자편각을 고려하여 NED(North-east-down) 좌표계에 대한 수중로봇의 위치를 추정하는 것이 일반적이다. 하지만 자편각은 지역과 시간에 따라 유동적이고 자기컴퍼스의 측정값은 주변 자기장 영향, 센서 성능에 따라 측정 잡음을 포함하기 때문에, 이동거리 및 운용시간에 따라 진북에 대한 자기컴퍼스의 방향각 차이를 추정할 필요가 있다.
본 논문에서는 자북(Magnetic north) 기준의 자기컴퍼스 자세정보를 진북(Geodetic north)을 기준으로 교정(Calibration)하여 기존의 자기컴퍼스와 도플러 속도계를 이용한 추측항법과 GPS를 이용한 위성항법을 통합한 GPS 보조 추측항법 알고리즘을 제안한다. 제안하는 알고리즘은 수상주행 시 수신하는 GPS 위치정보를 통해 진북에 대한 자기컴퍼스의 방향각 바이어스 오차를 추정하여 기준좌표계를 일치시키고 추측항법의 적분으로 인해 누적되는 위치오차를 개선한다. 이후 수중주행에서는 일치된 기준좌표계에 대한 추측항법으로 위치를 추정한다. 또한 동역학 시뮬레이션을 구현하여 제안하는 알고리즘의 성능을 확인한다.
본 논문의 구성은 다음과 같다. 2장에서는 선체의 좌표계를 설정하고 추측항법과 위성항법의 기준좌표계에 대해 설명한다. 3장에서는 확장칼만필터(Extended Kalman filter, EKF)를 이용하여 설계한 GPS 보조 추측항법 알고리즘을 제안한다. 4장에서는 제안하는 알고리즘의 성능 확인을 위해 구현한 동역학 시뮬레이션의 무인잠수정 모델과 센서 모델, 그리고 시뮬레이션 결과를 설명하며, 마지막으로 5장에서 논문의 결론과 향후 연구 방향을 기술한다.
2. 좌표계
지구고정좌표계 {E}와 선체고정좌표계(OXoYoZo) {B} 그리고 선체에 탑재된 자기컴퍼스의 센서좌표계(OMCXMCYMCZMC)를 Fig. 2와 같이 설정한다. 본 논문에서는 지구고정좌표계로 NED 좌표계를 이용한다. 선체의 병진 및 회전 운동과 관련한 속도와 위치, 선체고정좌표계의 각 축에 작용하는 힘과 모멘트는 Table 1과 같이 나타낸다(SNAME, 1950).
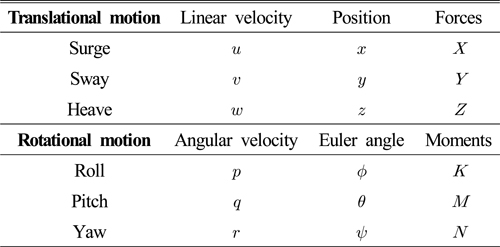
Fig. 2에서 선체에 고정된 자기컴퍼스의 특성을 고려할 때, 선체고정좌표계와 센서좌표계는 Zo(⫽ZMC)축에 대한  의 회전으로 상호 변환 가능하다.
의 회전으로 상호 변환 가능하다.  는 선체고정좌표계의 중심에서 자북으로의 방향 벡터,
는 선체고정좌표계의 중심에서 자북으로의 방향 벡터,  는 선체고정좌표계의 중심에서 진북으로의 방향 벡터를 나타내며, 두 벡터의 끼인 각을
는 선체고정좌표계의 중심에서 진북으로의 방향 벡터를 나타내며, 두 벡터의 끼인 각을  로 나타낸다.
로 나타낸다.
의 회전으로 상호 변환 가능하다. 는 선체고정좌표계의 중심에서 자북으로의 방향 벡터, 는 선체고정좌표계의 중심에서 진북으로의 방향 벡터를 나타내며, 두 벡터의 끼인 각을 로 나타낸다.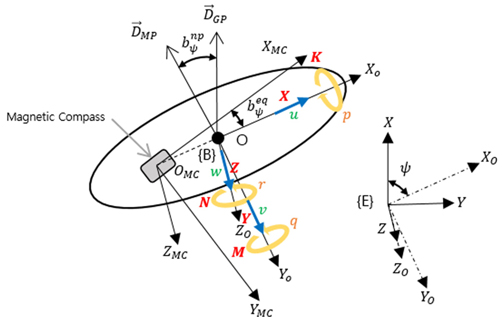
추측항법과 위성항법을 통합하여 NED 좌표계에 대한 추측항법을 구현하기 위해 각 항법의 기준좌표계에서 NED 좌표계로의 변환관계가 필요하다. 본 논문에서 위성항법의 기준좌표계는 NED 좌표계로 두며, GPS의 위치정보는 NED 좌표계로 변환된 값으로 고려한다. 또한 추측항법의 기준좌표계와 NED 좌표계간의 각도 차이 b𝜓는 식 (1)로 여러 요소들을 포함한다.

여기서,  는 주변 자기장 영향에 의해 발생하는 오차와 자기컴퍼스의 측정 잡음을 포함한다.
는 주변 자기장 영향에 의해 발생하는 오차와 자기컴퍼스의 측정 잡음을 포함한다.
는 주변 자기장 영향에 의해 발생하는 오차와 자기컴퍼스의 측정 잡음을 포함한다.3. GPS 보조 추측항법 알고리즘
본 장에서는 확장칼만필터를 이용하여 GPS 보조 추측항법 알고리즘을 설계한다. 자기컴퍼스, DVL, 자이로, GPS의 측정값과 제안하는 알고리즘을 통해 추측항법의 누적 위치오차를 개선하고 진북에 대한 자기컴퍼스의 방향각 바이어스 오차를 추정하여 NED 좌표계에 대한 추측항법을 구현한다.
3.1 알고리즘 설계
GPS 보조 추측항법을 구현하기 위해 무인잠수정의 운동을 식 (2)의 연속시간에 대한 상태방정식과 출력방정식으로 표현한다.

여기서, f(x(t))와 h(x(t))는 연속시간에 대한 함수로 시스템 및 측정 모델을 나타내고, q(t)와 r(t)은 각 모델의 잡음 특성을 고려한 공분산 행렬이다. 또한 x(t)는 식 (3)에 나타낸 상태 벡터이며, y(t)는 식 (4)에 나타낸 센서 측정값에 대한 벡터이다.


여기서, 상태 벡터 x(t)∈ℛ8×1는 NED 좌표계에서 무인잠수정의 위치(X, Y), 수심(Z), 방향각(𝜓), 선체고정좌표계에서 무인잠수정의 속도(ur, vr), Z축에 대한 각속도(r), 식 (1)에서 정의한 위성항법과 추측항법의 기준좌표계의 각도 차이(b𝜓)로 구성되며, 측정 벡터 y(t)∈ℛ7×1는 상태벡터와 직·간접적인 관계를 가지는 DVL 측정값(um, vm), 자기컴퍼스 측정값(𝜓m), 자이로의 측정값(rm), GPS의 경위도 측정값을 미터 단위로 변환한 값(Xm, Ym), 압력 센서의 수심(Zm)으로 구성된다.
상태방정식과 출력방정식의 모델은 기구학적 관계식에 의해 식 (5)로 나타낸다.
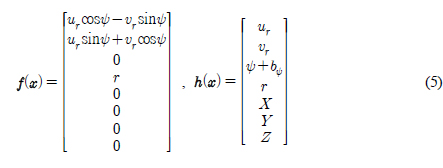
식 (5)의 시스템 모델이 비선형이고, 식 (2)의 방정식에서 시스템 모델과 측정 모델에 대한 잡음을 개선하기 위해 Table 2와 같이 확장칼만필터를 이용하여 상태 벡터 x(t)를 추정하는 알고리즘을 설계한다.

여기서, 입력값은 이전 루프에 추정한 상태벡터  와 오차 공분산 행렬 Pk−1, 센서 측정값 yk이다. 시스템 모델에 대한 함수를 통해 ①-④를 계산하고 ⑤에서 적분하여 상태벡터의 8개 값을 예측한다. ⑥에서는 비선형의 함수 f(x), h(x)에 대해 편미분하여 일정 구간에 대해 선형화한다. ⑦에서 선형화한 시스템 모델 Ajacob을 이용하여 상태 천이행렬 Φ을 구한다. 이후, 식 ⑧에서는 오차 공분산에 대한 예측값을 계산하고, ⑨를 통해 칼만 이득값을 구한다. 마지막으로 식 ⑩-⑪에서 칼만 이득을 적용하여 상태값을 추정하고 오차공분산을 계산한다.
와 오차 공분산 행렬 Pk−1, 센서 측정값 yk이다. 시스템 모델에 대한 함수를 통해 ①-④를 계산하고 ⑤에서 적분하여 상태벡터의 8개 값을 예측한다. ⑥에서는 비선형의 함수 f(x), h(x)에 대해 편미분하여 일정 구간에 대해 선형화한다. ⑦에서 선형화한 시스템 모델 Ajacob을 이용하여 상태 천이행렬 Φ을 구한다. 이후, 식 ⑧에서는 오차 공분산에 대한 예측값을 계산하고, ⑨를 통해 칼만 이득값을 구한다. 마지막으로 식 ⑩-⑪에서 칼만 이득을 적용하여 상태값을 추정하고 오차공분산을 계산한다.
와 오차 공분산 행렬 Pk−1, 센서 측정값 yk이다. 시스템 모델에 대한 함수를 통해 ①-④를 계산하고 ⑤에서 적분하여 상태벡터의 8개 값을 예측한다. ⑥에서는 비선형의 함수 f(x), h(x)에 대해 편미분하여 일정 구간에 대해 선형화한다. ⑦에서 선형화한 시스템 모델 Ajacob을 이용하여 상태 천이행렬 Φ을 구한다. 이후, 식 ⑧에서는 오차 공분산에 대한 예측값을 계산하고, ⑨를 통해 칼만 이득값을 구한다. 마지막으로 식 ⑩-⑪에서 칼만 이득을 적용하여 상태값을 추정하고 오차공분산을 계산한다.4. 알고리즘 성능 확인
제안한 GPS 보조 추측항법 알고리즘의 성능을 확인하기 위해 Matlab Simulink 기반의 동역학 시뮬레이터를 구현하였다. 구현한 시뮬레이터의 흐름도는 Fig. 3과 같다.
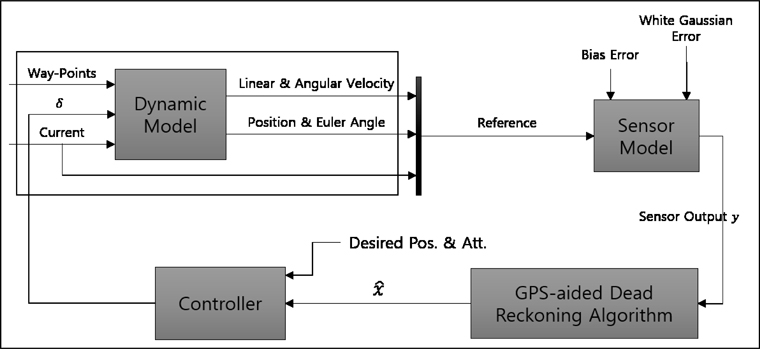
시뮬레이터는 크게 네 부분으로 나뉘며, 데이터의 흐름에 따라 6자유도의 비선형 운동방정식으로 고려되는 무인잠수정의 동역학 모델, 사용중인 센서의 특성을 고려하여 측정값을 생성하는 센서 모델, 제안하는 GPS 보조 추측항법 알고리즘, 경유점제어 시뮬레이션을 수행하기 위해 속도, 방향각, 수심을 제어하는 제어기로 구성된다.
4.1 동역학 모델
앞서 수행된 연구를 통해 6자유도 비선형 운동방정식이 존재하고 다양한 유체력 계수들이 도출되어 있어 실제 무인잠수정의 운동과 유사한 동특성을 지닐 것이라 판단하여 NPS ARIES AUV를 동역학 모델로 사용하였다(Healey and Lienard, 1993; Boncal, 1987; Fossen, 1994; Gertler and Hagen, 1967).
4.2 센서 모델
추후 실제 운용중인 무인잠수정에 알고리즘을 적용하기 위해, 사용 중인 센서의 바이어스 오차와 측정 잡음을 고려하여 동역학 모델의 거동에 대한 센서 측정값을 생성한다. 구현된 시뮬레이터에서 센서 모델은 Table 3과 같다.
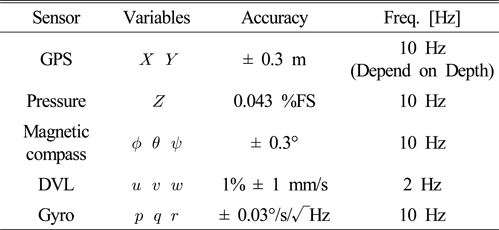
센서의 매뉴얼에 표기된 사양 또는 개별적인 센서테스트를 수행하여 정확도를 결정하였으며, 센서 측정값의 수신 주기는 현재 운용중인 무인잠수정에 탑재된 센서의 주기를 고려하였다. GPS 모델의 생성된 측정값은 UTM(Universal transverse mercator) 좌표계로 변환된 값이며, 진북 기준의 위치정보로 고려하였다. 또한 수중에서 GPS의 위치정보를 수신할 수 없음을 고려하여 수심이 0.3m 이상일 경우 GPS 모델로부터 위치정보를 갱신하지 않도록 하였다.
4.3 제어기
식 (6)과 같이 전진방향의 속도, 방향각, 수심에 대한 PD(Proportional derivative) 또는 PID(Proportional integral derivative) 제어기를 설계하였으며, 추진기 회전수(δn), 방향타(δr), 선미의 수평타(δs)를 제어하여 경유점 제어 시뮬레이션을 수행하였다.

여기서, 이득 Ksp, Ksi, Ksd는 전진방향의 속도 PID 제어기의 이득을 나타내며 eu는 목표로 하는 전진방향의 속도와 측정된 속도간의 차이를 나타낸다. 이득 Khp, Khd는 방향각 PD 제어기의 이득을 나타내며 e𝜓는 목표로 하는 방향각과 측정된 방향각 간의 차이를 나타낸다. 수심제어의 경우 제어기의 성능과 무인잠수정의 안정적인 거동을 위해 수심과 선체고정좌표계의 Yo축에 대한 회전(Pitch)을 함께 고려하여 제어기를 설계하였다. 이득 Kdp, Kdd는 수심 PD 제어기의 수심 오차에 대한 이득, eZ는 목표로 하는 수심과 측정된 수심 간의 차이를 나타낸다. Kpp, Kpd는 수심 PD 제어기의 Yo축에 대한 회전각도(θ) 오차에 대한 이득, eθ는 목표로 하는 Pitch 각과 측정된 Pitch 각 간의 차이를 나타낸다.
제어기의 출력은 실제 무인잠수정의 모델을 고려하여 수직타와 수평타의 각도는 ±35°로, 시뮬레이터의 안정성을 위해 추진기의 회전수는 ±500rpm으로 한정하였다.
4.4 초기 설정
먼저, 진북에 대한 자기컴퍼스의 방향각 바이어스 오차  는 식 (7)과 같이 설정한다.
는 식 (7)과 같이 설정한다.
는 식 (7)과 같이 설정한다.
이는 자기컴퍼스를 이용한 추측항법의 기준좌표계가 NED 좌표계에서 Z축을 기준으로 20°의 각도 차이를 가지고 있음을 의미한다. 또한 초기 무인잠수정의 위치와 자세, 속력은 식 (8)과 같이 설정한다.

이는 무인잠수정 모델이 2m의 수심에서 진북방향으로 1노트(0.514m/s)의 속력으로 출발함을 나타낸다. 목표 경유점은 ‘ㄹ’자형의 궤적을 그리도록 10개의 경유점을 Table 4와 같이 설정한다.
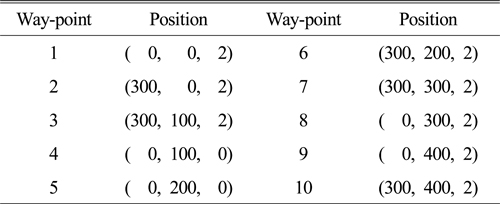
수중의 3번째 경유점을 경유한 후 수상의 4번째 경유점을 거쳐 5번째 경유점까지 이동하는 구간에서 무인잠수정은 수상주행으로 GPS 위치정보를 수신하여 진북에 대한 자기컴퍼스의 방향각 바이어스 오차와 무인잠수정의 위치를 추정한다.
추가적인 외란으로는 지구고정좌표계의 X, Y축에 대해 각각 0.2노트(0.103m/s), 0.48노트(0.247m/s)의 조류모델을 설정하였다.
4.5 시뮬레이션 결과
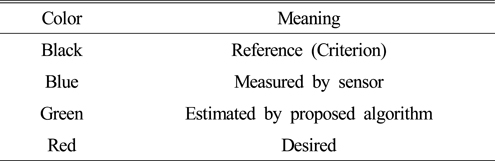
시뮬레이션 결과 그래프는 Table 5와 같이 그래프의 색상에 따라 의미를 구분하여 나타내었다.
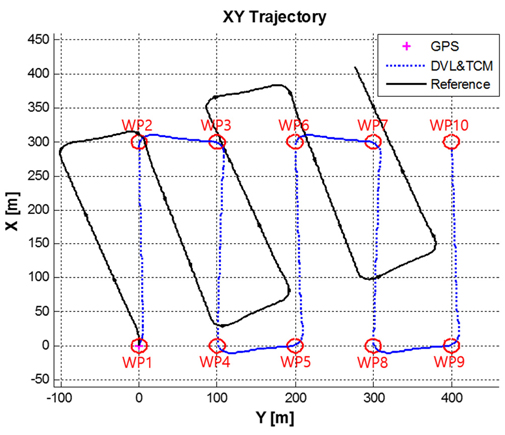
본 논문에서 제안하는 알고리즘의 성능을 확인하기 위해 알고리즘의 적용 유무에 따라 시뮬레이션을 수행하고 그 결과를 비교한다. 먼저, Fig. 4는 자편각을 고려하지 않고 도플러 속도계와 자기컴퍼스를 이용한 추측항법으로 경유점 제어 시뮬레이션을 수행하여 무인잠수정의 이동궤적을 XY 평면상에 나타낸 것이다. 추측항법으로 추정한 파란색의 이동 궤적은 설정된 10개의 경유점들을 경유하여 목표지점에 잘 도달하는 것으로 보이나, 검은색으로 나타낸 무인잠수정의 실제 이동궤적과 일정한 각도로 편향된 궤적을 그리며 운용시간과 거리가 늘어남에 따라 두 궤적의 위치오차가 증가함을 확인할 수 있었다.
다음으로 본 논문에서 제안하는 알고리즘을 적용하여 경유점 제어 시뮬레이션을 수행하였다. XY 평면상에서 무인잠수정의 이동궤적은 Fig. 5와 같다. WP1-WP2 구간에서는 진북에 대한 자기컴퍼스의 방향각 바이어스 오차로 인해 검은색으로 표현된 무인잠수정의 실제 이동궤적은 추측항법으로 추정한 파란색의 이동궤적과 다른 궤적을 그리며, 이동거리와 운용시간에 지남에 따라 위치오차가 커짐을 볼 수 있다. 위치오차를 개선하고 자기컴퍼스의 방향각 바이어스 오차를 추정하여 NED 좌표계에 대한 추측항법을 수행하기 위해, Fig. 5의 WP2-WP4의 경로에서 수상주행으로 GPS 위치정보를 수신하도록 하였으며, WP2 인근에서 GPS 위치정보를 수신하기 시작함에 따라 Fig. 6에서 초록색으로 나타낸 추측항법의 위치오차가 개선됨을 확인하였다. 또한 제안한 알고리즘을 통해 Fig. 7에서 초록색으로 나타낸 진북에 대한 자기컴퍼스의 방향각 바이어스 오차 추정값이 초기에 설정한 검은색의 방향각 차이 20°로 근사하게 추정됨을 확인하였다.
Fig. 7과 같이 GPS 위치정보를 통해 추측항법의 위치오차가 발생하는 원인 중 하나인 자기컴퍼스의 방향각의 오차를 추정하고 이를 보정함으로써 이후의 수중운항 구간에서 GPS 위치 정보를 수신할 수 없음에도 불구하고 파란색으로 나타낸 알고리즘의 적용 전과 비교하여 시간당 누적되는 위치오차가 크게 줄어든 것을 Fig. 6의 초록색 그래프를 통해 확인하였다. 또한 Fig. 5에서 나타낸 무인잠수정의 최종적인 위치 추정값도 무인잠수정의 실제 위치와 크게 다르지 않음을 확인하였다.
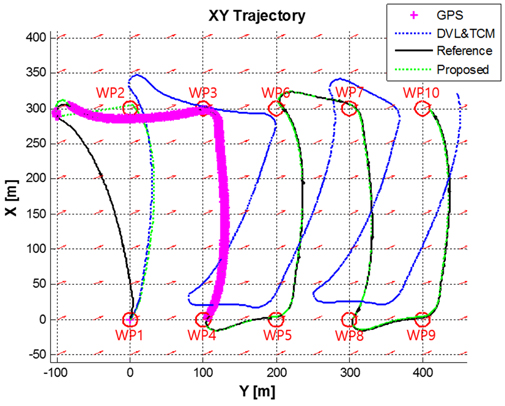
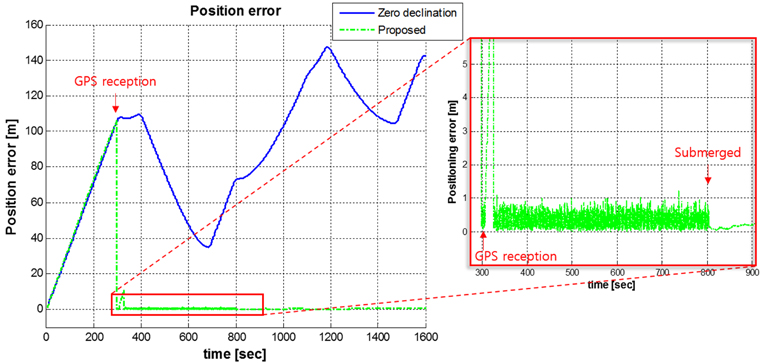

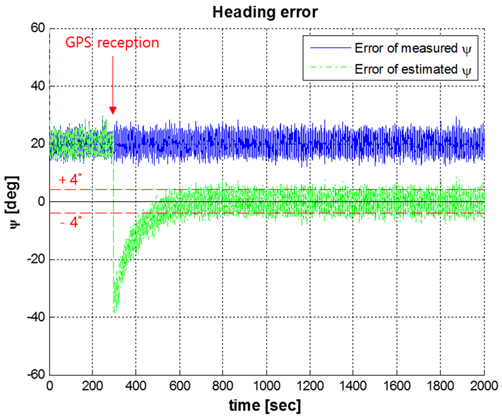
Fig. 8은 무인잠수정의 방향각을 나타내며, Fig. 8에서 검은색으로 나타낸 무인잠수정의 실제 방향각에 대해 자기컴퍼스로 측정된 파란색의 방향각, 제안한 알고리즘을 통해 추정한 초록색의 방향각의 차이를 Fig. 9에 나타내었다. 두 그림에서 초기에 설정한 자기컴퍼스의 방향각 바이어스 오차 20°에 의해 시뮬레이션 전 구간에 걸쳐 무인잠수정의 실제 방향각과 파란색으로 나타낸 자기컴퍼스의 방향각 측정값에는 약 20°의 바이어스 오차가 존재함을 확인할 수 있다. 또한 자기컴퍼스의 방향각 바이어스 오차의 초기값을 0으로 고려함에 따라 GPS 위치정보를 수신하기 전, 0-297초의 구간에서 초록색의 선으로 나타낸 방향각 추정값과 무인잠수정의 실제 방향각 역시 약 20°의 바이어스 오차가 존재함을 확인할 수 있다.
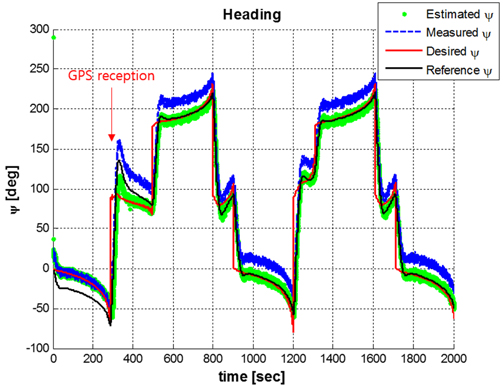
297초 이후 2번째 경유점 인근에서 GPS 위치정보를 수신하여 자기컴퍼스의 방향각 바이어스 오차를 추정하였으며, Fig. 9에서 초록색으로 나타낸 그래프를 통해 무인잠수정의 실제 방향각과 방향각 추정값의 오차가 개선됨을 확인하였다.
시뮬레이션에서 무인잠수정의 실제 도착점에 대해 추측항법의 위치와 제안한 알고리즘이 추정한 위치를 수치적으로 비교하여 제안한 알고리즘의 성능을 확인하기 위해 아래의 세 가지 경우를 들어 시뮬레이션을 수행하였다.
세 가지 시뮬레이션을 수행하고 그 결과를 Table 6에 나타내었다. 일반적으로 자기컴퍼스를 사용한 추측항법에서는 ⓶의 경우와 같이 상수 형태의 자편각을 고려하고 있지만, 식 (1)에 기술하였듯이 진북에 대한 자기컴퍼스의 방향각 바이어스 오차는 자편각 외에 추가적으로 고려해야할 바이어스 오차가 존재하며, 이동거리와 운용시간에 따라 자편각이 변하기 때문에 알고리즘을 제안하였다. ⓵에서는 방향각 바이어스 오차를 고려하지 않아 약 20°의 방향각 바이어스 오차를 가진 채 시뮬레이션이 수행되었고, ⓶에서는 방향각 바이어스 오차를 15°로 고려하여 약 5°의 방향각 바이어스 오차를 가진 채 시뮬레이션이 수행되었다. ⓷에서는 GPS 위치정보를 통해 방향각 바이어스 오차를 추정하였으며, Fig. 7에서 볼 수 있듯이 최종적으로 추정된 방향각 바이어스 오차 19.96°를 고려하여 약 0.04°의 방향각 바이어스 오차로 수중운항 시뮬레이션이 수행되었다.
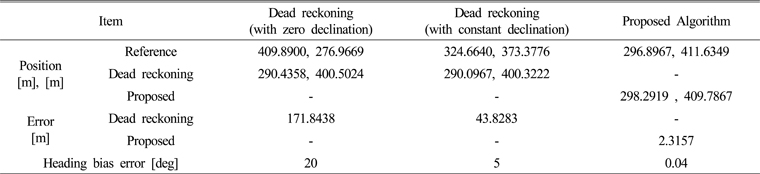
시뮬레이션 결과로 최종 도착점에서 무인잠수정의 XY 평면상의 위치, 무인잠수정의 실제 위치에 대한 추측항법 또는 제안한 항법알고리즘의 위치오차를 나타내어, 제안한 알고리즘을 통해 수중운항 시 추측항법의 위치 추정 성능이 개선됨을 확인하였다.
5. 결 론
본 논문에서는 확장칼만필터를 이용한 무인잠수정의 GPS 보조 추측항법 알고리즘을 제안하고 동역학 시뮬레이터를 구현하여 알고리즘의 기본적인 성능을 확인하였다. 또한 제안한 알고리즘을 실제 무인잠수정에 적용하기 위해 시뮬레이션의 센서 모델은 사용 중인 센서의 특성을 고려하여 센서 측정값을 생성하도록 하였다.
시뮬레이션 결과를 통해, 제안하는 항법알고리즘은 GPS 위치 정보를 수신하여 DVL과 자기컴퍼스를 이용한 추측항법의 누적 위치오차를 개선함을 보였다. 본 논문에서는 특별히 무인잠수정의 수중운항 시 GPS 위치정보를 수신할 수 없음을 고려하여, 추측항법의 시간당 누적되는 위치오차의 원인을 찾고 이를 개선하여 수중운항 시 위치오차의 발산을 억제하려 하였다. 원인 중 하나로 자기컴퍼스의 방향각 오차를 지목하였으며, 운용 초기 또는 운용 중 수상주행으로 GPS 위치정보를 수신하여 자기컴퍼스의 방향각 오차를 보정하였다. 이를 통해 NED 좌표계로 추측항법의 기준좌표계를 일치시킴으로써 자기컴퍼스의 방향각 오차에서 기인하는 추측항법의 시간당 발생하는 위치오차를 개선하였다. 본 논문을 통해, 수상주행 시에만 위치를 보정하기 위해 사용되던 GPS를 이용한 기존 수중항법의 성능 개선 가능성을 보였다.
향후 실제 무인잠수정에 알고리즘을 적용하고, 실해역 실험을 통해 효용성을 확인하는 연구를 진행할 것이다. 본 논문에서 제안하는 알고리즘은 연안을 벗어나 장기간, 장거리로 무인잠수정을 운용할 경우 무인잠수정의 항법에 큰 도움이 될 것으로 판단된다.




