실해역 시험 데이터를 이용한 파일럿 채광로봇 엄빌리컬 케이블의 축진동 해석
Axial Vibration Analysis of Umbilical Cable with Pilot Mining Robot using Sea Test Data
Article information
Abstract
Axial vibration analysis is very important for a deep-seabed mining system. In this study, an axial vibration analysis was carried out to estimate the natural frequencies and tensions of the umbilical cable using experimental data obtained from the first pre-pilot mining test. The axial vibrations of the umbilical cable with a pilot mining robot at the bottom end were analytically determined. The range of the added mass coefficients of the pilot mining robot is estimated by comparing the experimental and analytical data. The natural frequencies and maximum tensions are calculated using four estimated added mass coefficients.
1. 서 론
한국해양과학기술원 부설 선박해양플랜트연구소에서는 2007년 심해저 망간단괴 채광기술 실용화의 첫 단계로서 자주식 시험집광기를 개발하여, 2009년 우리나라 동해 후포항 부근의 수심 약 100m 해역에서 첫 번째 집광 실증시험(Hong et al., 2009), 2010년 동일 해역에서 경로주행제어시험(Yeu et al., 2010)을 각각 수행하였다.
2차례의 근해역 실증 시험을 통해 획득된 시험집광기 기술을 바탕으로, 2011년부터 5,000m급 파일럿 규모(상업 채광용광의 1/5)의 채광로봇(미내로, MineRo)을 설계하여, 2012년 9월 제작을 완료하였다. 제작된 파일럿 채광로봇(Fig. 1)은 동일한 구조를 가진 2개의 단위모듈로 구성되는 것이 특징이다. 파일럿 채광로봇의 예비성능 검증을 위해, 선박해양플랜트연구소가 보유하고 있는 심해저 집광실험동에서 단위모듈별 전력 · 신호 통전 시험(Electric-electronic system tset), 유압구동시험(Hydraulic system test), 주행시험(Driving test), 파쇄시험(Crushing test), 채집시험(Collecting test) 등을 각각 수행하였다. 2012년 11월, 동해안 수심 130m 해역에서 1차 예비 파일럿 집광성능시험(Pre-pilot mining test, PPMT)을 수행하였다(Hong et al., 2013). 1차 성능시험은 파일럿 채광로봇의 기계적 성능과 모조단괴(Artifical nodule)를 이용한 채집성능을 시험하는 것에 초점을 두었다

Pilot mining robot, MineRo
예비 파일럿 시험에서의 채광로봇은 와이어로 보호된 엄빌리컬 케이블에 연결되어 진 · 회수가 된다. 엄빌리컬 케이블은 선박 갑판에 설치된 윈치에 연결되어 선박의 상하운동에 의해 축방향 운동을 하게 된다. 이러한 동적 운동은 엄빌리컬 케이블에 작용하는 장력의 변화를 발생시킬 수 있다. 특히, 외력에 의한 가진 주파수가 엄빌리컬 케이블의 고유주파수에 근접할 경우, 엄빌리컬 케이블에 작용하는 장력은 급격히 상승하게 된다. 따라서 파일럿 채광로봇의 진 · 회수 작업에서의 안정성 검토를 위해 케이블의 동적해석은 매우 중요하다.
물체가 매달린 해양 케이블의 동적해석에 관한 많은 연구가 수행되어왔다. Berteaux(1975)는 유체 점성력을 무시하고 케이블 끝단에 물체가 매달린 경우 케이블 상부와 끝단에서 발생되는 장력을 계산하였다. Jung et al.(2008)은 케이블의 장력을 수치해석 모델을 이용하여 계산하였다. Namba et al.(2009)은 라이저의 안쪽과 바깥쪽의 유체감쇠력의 상호작용을 고려하여 라이저의 장력을 계산하였으며, Boe and Nestegard(2010)은 케이블 하단에 물체가 매달려 진수되는 경우의 축방향 하중을 계산하였다. Park et al.(2010)은 유체 점성력과 구조감쇠력을 고려하여 해양 파이프의 축방향 진동해석을 수행하였다. Nam et al.(2012)와 Nam et al.(2013)은 상하동요 저감장치(Heave compensator)를 고려한 해상 크레인의 시간영역 연성 운동해석을 수행하였다. 하지만, 위의 많은 연구에도 불구하고 물체의 부가질량계수 추정에 관한 연구는 매우 제한적으로 수행되었다.
본 논문에서는 보다 정확한 축진동 해석을 위해 파일럿 채광로봇 부가질량 계수 추정에 관한 연구를 수행하였다. 파일럿 채광로봇에서 계측된 축방향 가속도 데이터를 분석하여, 파일럿 채광로봇의 부가질량 계수의 범위를 추정하였다. 추정된 부가질량 계수를 적용하여, 1차 예비 채광성능시험에서의 엄빌리컬 케이블-파일럿 채광로봇의 축방향 고유주기와 최대 인장력을 계산하였다. 끝으로 계측된 데이터를 분석하여 채광시스템의 안정성을 검토하였다.
2. 1차 예비 집광성능시험 데이터 분석
2.1 축방향 가속도 계측
1차 예비 집광성능시험에서 파일럿 채광로봇의 진수 및 회수 과정에서의 축방향 가속도 데이터는 파일럿 채광로봇 몸체에 부착된 RLG(Ring laser gyro) 센서(MiniRLG2, CDL)를 통해 계측된다. RLG 센서의 사양을 Table 1에 정리하였다.
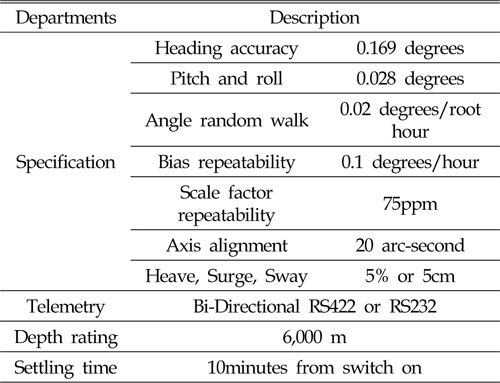
Specification of RLG
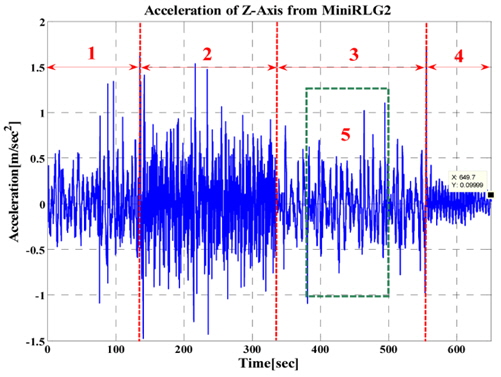
Fig. 2와 Fig. 3은 2012년 11월 6일, 로봇의 진수 과정에서 계측된 수심 데이터와 수직 방향의 가속도 데이터이다. Fig. 3에서 1번은 로봇이 해수면으로부터 진수가 시작되는 부분이며, 2번과 3번은 윈치에 의해 케이블이 점차 풀려져나가면서 로봇이 점차 깊이 진수되는 부분이다. 4번은 로봇이 해저면에 안착되어 진수가 끝난 부분이다. 2번 영역에서 계측된 값이 다른 영역의 값보다 큰 변화폭을 갖는 이유는 진수와 동시에 트랙이 구동되어 로봇에 추가적 진동을 발생시킨 것으로 분석된다.

Launching depth from pressure sensor
Acceleration data from RLG sensor
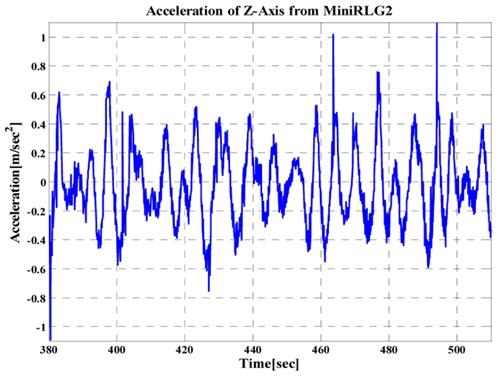
5번의 사각 점선으로 표시된 영역은 진수 과정에서 로봇이 일시적으로 정지된 지점으로, 금번 시험에서의 부가질량 계수 및 축방향 고유주기를 계산할 수 있는 가장 적합한 영역이다. 여기서 계측된 가속도를 Fig. 4에 자세히 나타내었다.
Acceleration data of ‘5’area
2.2 케이블 축진동 시간영역 분석
Fig. 5와 같이 길이가 L인 케이블의 하단에 물체가 매달려 있는 경우 운동방정식은 다음과 같다.
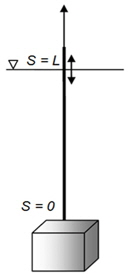
Configuration of the deepwater lift system

여기서 E와 A는 케이블의 탄성계수와 단면적, s는 케이블 길이, ∂2ξ/∂t2는 케이블의 가속도. mvp는 케이블의 단위 길이당 가상질량(Virtual mass)을 나타낸다.

여기서 mp는 케이블의 단위 길이당 질량, CMP는 케이블의 부가질량 계수, ρF는 유체밀도, VP는 케이블의 단위길이당 부피를 각각 의미한다.

식 (3)을 식 (1)에 대입하면 아래와 같다.

식 (4)를 변수분리법으로 풀이하면 ξ(s, t)는 다음과 같다.

여기서 j는 허수를 의미한다.
케이블 하단(s = 0)에서의 운동방정식은 다음과 같다(Berteaux, 1975).

여기서, mvb는 케이블 하단에 매달린 물체의 가상질량, μ는 매달린 물체에 작용하는 선형항력계수를 나타내며 다음과 같이 정의될 수 있다.

여기서 CDN는 수직 항력계수(Normal drag coefficient), Ab는 케이블 하단 끝에 매달려있는 물체의 축방향 단면적을 의미한다.



식 (8) ~ (10)을 식 (6)에 대입하면 식 (11)을 얻을 수 있다.

식 (11)을 N에 관하여 정리하면 다음과 같다.

식 (12)를 식 (5)에 대입하면,

케이블 상단(s = L)에서 정현파 가진이 작용한다고 가정하면 케이블 상단의 변위는 다음처럼 나타낼 수 있다.

여기서, Z0는 케이블 상단 최대 변위, ωe는 가진력의 주파수(rad/s)를 의미한다.
식 (14)를 고려하여 식 (13)을 풀이하면 케이블의 변위 함수를 다음과 같이 얻을 수 있다.


케이블 하단에서의 변위 함수와 가속도 함수는 다음과 같다.


또한, 케이블 상단에서의 변위 함수와 가속도 함수는 다음과 같다.


케이블 하단과 상단에 작용하는 인장하중은 아래의 식으로 각각 정의될 수 있다.


여기서, p는 케이블의 단위 길이당 하중, WB는 파일럿 채광로봇의 물속에서의 하중을 의미한다.
2.3 1차 예비 집광성능 엄빌리컬 케이블 축진동 해석
1차 예비 집광성능에 사용된 엄빌리컬 케이블의 물성치와 형상정보를 Table 2에 나타내었다. 파일럿 채광로봇의 수중무게는 9381 kg이며, 크기는 폭 4m, 길이 6.5m, 높이 5m 이다. 케이블의 부가질량 계수(CMP)는 1로 정의하였다. 데이터 획득일 시험 해상의 유의파고는 0.8 m로 계측되었으며, 실해역 실험시 파주기는 영역 5의 주파수 분석을 통해 약 6.3초로 추정되었다. Fig. 6은 영역 5의 주파수 분석 그래프를 보여준다.
Properties and geometric information of the umbilical cable

Power spectrum of acceleration data
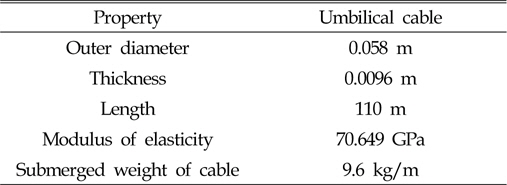
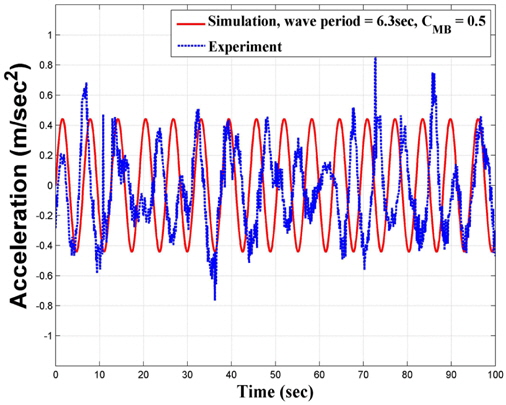
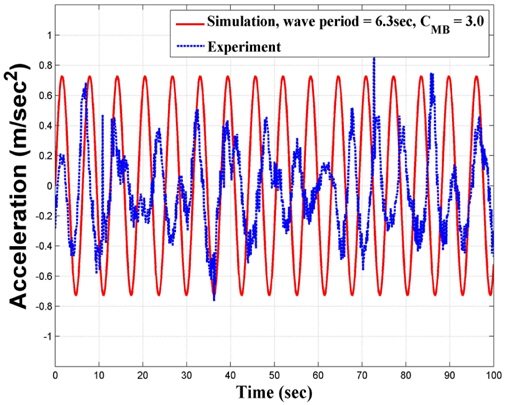
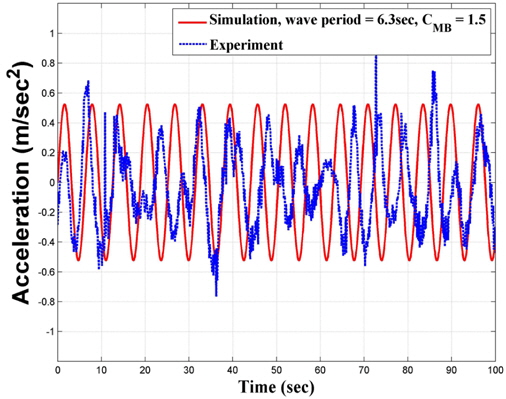
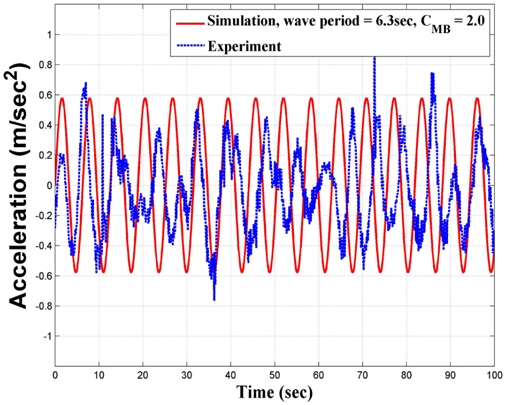
파일럿 채광로봇의 부가질량 계수(CMB)를 예측하기 위하여 CMB의 범위를 0.5 ~ 3로 가정하여 각각 해석하였으며, 계측된 축방향 데이터와 해석 데이터 비교를 통해 CMB의 범위를 추정하였다. Fig. 7 ~ Fig. 12는 파일럿 채광로봇의 부가질량 계수가 각각 0.5, 1, 1.5, 2, 2.5, 3인 경우 케이블 하단에서의 시간영역 가속도를 보여주고 있다. 그림에서 빨간색 실선은 식 (18)로 계산된 케이블 하단에서의 가속도이며, 파란색 점선은 계측된 가속도이다.
Comparison plot of experiment and simulation, CMB=0.5
Comparison plot of experiment and simulation, CMB=3
Comparison plot of experiment and simulation, CMB=1
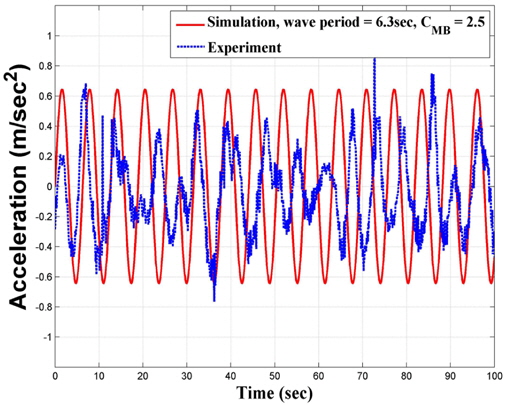
Comparison plot of experiment and simulation, CMB=2.5
Fig. 7 ~ Fig. 9에서는 계측된 가속도와 계산된 가속도의 크기가 유사한 반면, Fig. 10 ~ Fig. 12에서는 계산된 가속도의 크기가 계측된 가속도 보다 매우 크게 나타나고 있다. 이러한 데이터 비교를 통해 CMB의 범위를 0.5 ~ 1.5까지 0.5 간격으로 산정하였다. Table 3에 파일럿 채광로봇의 부가질량 계수 변화에 따른 엄빌리컬 케이블의 축진동 공진주기를 정리하였다. 엄빌리컬 케이블의 전달함수(Max[ξ(0,t)/Z0)])를 Fig. 13에 나타내었으며, 케이블 상부와 하단에 작용하는 최대 인장하중의 변화를 Fig. 14와 Fig. 15에 나타내었다.
Comparison plot of experiment and simulation, CMB=1.5
Comparison plot of experiment and simulation, CMB=2
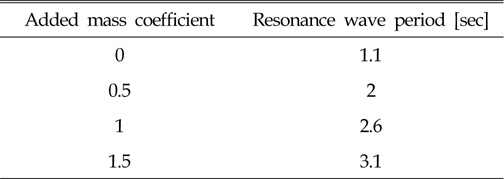
Resonance wave periods of axial vibration with different added mass coefficient

Comparison plot of transfer functions
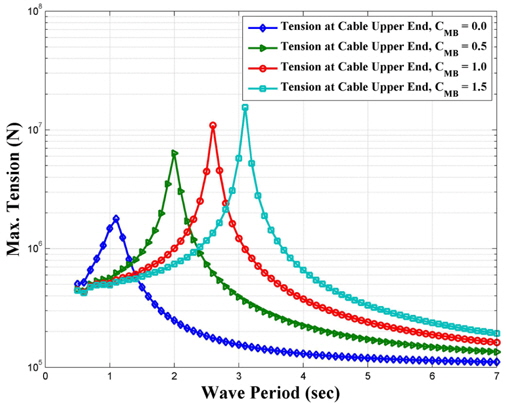
Maximum tensions at cable upper end
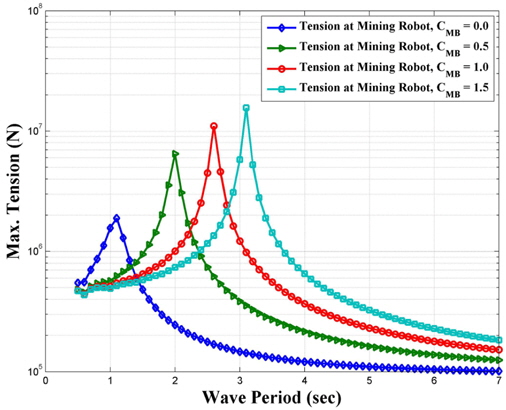
Maximum tensions at Mining Robot
1차 예비 집광성능시험의 엄빌리컬 케이블의 축진동 공진주기는 파일럿 채광로봇의 부가질량 계수 변화에 따라 1.1초 ~ 3.1초로 계산되었다. 실해역 실험 시, 파주기 6.3초에 비해 케이블의 축진동 공진주기가 매우 작으므로 안정된 영역에서 1차 예비 집광성능실험이 수행되었음을 알 수 있다. 파주기가 6.3초인 경우 엄빌리컬 케이블 상부에 작용하는 최대 인장하중은 부가질량 계수 0, 0.5, 1, 1.5에 따라 113.16kN, 143.44kN, 178.88kN, 220.93kN으로 각각 계산되었다.
3. 결 론
본 논문에서는 1차 예비 집광성능시험에서 계측된 엄빌리컬 케이블의 축방향 가속도 응답을 분석하였으며, 고유주기와 최대인장하중을 계산하였다. 엄빌리컬 케이블의 축진동 분석을 통해 다음과 같은 결론을 얻을 수 있었다.
(1) 계측된 가속도 데이터를 이용하여 파일럿 채광로봇의 부가질량 계수를 0.5 ~ 1.5 범위로 산정하였다.
(2) 파일럿 채광로봇의 부가질량 계수가 커짐에 따라 축방향 공진주기는 1.1초 ~ 3.1초로 변화되었다.
(3) 실해역 시험 시 발생된 해양파의 주기 6.3초는 공진영역에서 매우 떨어진 영역이므로, 1차 예비 집광성능시험에서 파일럿 채광로봇의 진/회수 시 케이블의 축진동 공진이 발생할 가능성이 매우 낮았음을 알 수 있었다.
(4) 엄빌리컬 케이블의 상부에 작용하는 축방향 인장하중은 최대 220.93kN으로 실험에 사용된 A-프레임의 안전운용하중 255kN의 범위로 계산되었다.
향후 보다 정확한 파일럿 채광로봇의 부가질량 계수 추정을 위하여 케이블 상부 변위의 실측이 필요하며, 이를 고려한 케이블 해석 기법의 연구가 수행되어야 한다.
Notes
It is noted that this paper is revised edition based on proceedings of KSOE 2013 in Seoul.
Acknowledgements
본 연구는 해양수산부 지원으로 수행되고 있는 “심해저 광물자원 통합채광시스템 개발 연구” 과제의 연구결과 중 일부임을 밝히며, 연구비 지원에 감사드립니다.
References
Berteaux, H.O., 1975. Buoy engineering, Woods Hole Oceanographic Institution.
Berteaux H.O.. Buoy engineering Woods Hole Oceanographic Institution; 1975.Boe, T., Nesterard, A., 2010. Dynamic Forces Deepwater Lifting Operations. Proceedings of the Twentieth International Offshore and Polar Engineering Conference, ISOPE, Beijing China, 500-507.
Boe T., Nesterard A.. Dynamic Forces Deepwater Lifting Operations In : Proceedings of the Twentieth International Offshore and Polar Engineering Conference, ISOPE. Beijing China; 2010. p. 500–507.Hong, S., Kim, H.W., Choi, J.S., Yeu, T.K., Park, S.J., 2009. A Test Miner for Deep-seabed Manganese Nodules and Inshore Performance Tests. Proceedings of the Annual Autumn Meeting, KSOE, Geoje Korea, 293-296.
Hong S., Kim H.W., Choi J.S., Yeu T.K., Park S.J.. A Test Miner for Deep-seabed Manganese Nodules and Inshore Performance Tests In : Proceedings of the Annual Autumn Meeting, KSOE. Geoje Korea; 2009. p. 293–296.Hong, S., Kim, H.W., Yeu, T.K., Choi, J.S., Min, C.H., Yoon, S.M., Kim, J.H., Lee, M.U., Sung, K.Y., Lee, C.H., Oh, J.W., Park, S.S., 2013. The Development of Pilot Mining Robot, MineRo, and Sea Performance Tests. Proceedings of the Annual Autumn Meeting, KSOE, Seoul Korea, 60-63.
Hong S., Kim H.W., Yeu T.K., Choi J.S., Min C.H., Yoon S.M., Kim J.H., Lee M.U., Sung K.Y., Lee C.H., Oh J.W., Park S.S.. The Development of Pilot Mining Robot, MineRo, and Sea Performance Tests In : Proceedings of the Annual Autumn Meeting, KSOE. Seoul Korea; 2013. p. 60–63.Jung, D.H., Lee, S.W., Moon, D.S., Park, H.I., 2008. An analysis on axial vibration of very long risers. Proceedings of the Annual Autumn Meeting, KSOE, Ulsan Korea, 327-330.
Jung D.H., Lee S.W., Moon D.S., Park H.I.. An analysis on axial vibration of very long risers In : Proceedings of the Annual Autumn Meeting, KSOE. Ulsan Korea; 2008. p. 327–330.Namba, Y., Uto, S., Nimura, T., Kokubun, K., Kuroda, T., 2009. Experiments for Modeling Internal Fluid Effect on Hung-off Rigid Riser under Axial Motion. Proceedings of The Nineteenth International Offshore and Polar Engineering Conference, ISOPE, Osaka Japan, 365-372.
Namba Y., Uto S., Nimura T., Kokubun K., Kuroda T.. Experiments for Modeling Internal Fluid Effect on Hung-off Rigid Riser under Axial Motion In : Proceedings of The Nineteenth International Offshore and Polar Engineering Conference, ISOPE. Osaka Japan; 2009. p. 365–372.Nam, B.W., Hong, S.W., Kim, J.W., Lee, D.Y., 2012. Numerical Analysis of Offshore Installation Using a Floating Crane with Heave Compensator in Waves. Journal of Ocean Engineering and Technology, KSOE, 26(1), 70-77.
Nam B.W., Hong S.W., Kim J.W., Lee D.Y.. Numerical Analysis of Offshore Installation Using a Floating Crane with Heave Compensator in Waves. Journal of Ocean Engineering and Technology KSOE; 2012;26(1):70–77.Nam, B.W., Hong, S.W., Kim, Y.S., Kim, J.Y., 2013. Effects of Passive and Active Heave Compensators on Deepwater Lifting Operation. International Journal of Offshore and Polar Engineering, 23(1), 33-37.
Nam B.W., Hong S.W., Kim Y.S., Kim J.Y.. Effects of Passive and Active Heave Compensators on Deepwater Lifting Operation. International Journal of Offshore and Polar Engineering 2013;23(1):33–37.Park, H.I., Min, C.H., Teng, B., Kwon, Y.J. Kim, B.M., 2010. Effects of Fluid and Structural Damping on Axial Vibrations of an Ultra Long Ocean Pipe with a Heavy Buffer. Proceedings of the Twentieth International Offshore and Polar Engineering Conference, ISOPE, Beijing China, 88-93.
Park H.I., Min C.H., Teng B., Kwon Y.J., Kim B.M.. Effects of Fluid and Structural Damping on Axial Vibrations of an Ultra Long Ocean Pipe with a Heavy Buffer In : Proceedings of the Twentieth International Offshore and Polar Engineering Conference, ISOPE. Beijing China; 2010. p. 88–93.Yeu, T.K., Yoon, S.M., Hong, S., Park, S.J., Kim, D.W., Kim, H.W., Lee, C.H., Choi, J.S., 2010. Analysis on Characteristic of MineRo Heading Sensors through Inshore-test. Proceedings of the Annual Autumn Meeting, KSOE, Mokpo Korea, 255-258.
Yeu T.K., Yoon S.M., Hong S., Park S.J., Kim D.W., Kim H.W., Lee C.H., Choi J.S.. Analysis on Characteristic of MineRo Heading Sensors through Inshore-test In : Proceedings of the Annual Autumn Meeting, KSOE. Mokpo Korea; 2010. p. 255–258.