


1. м„ң лЎ
мқёк°„мқҙ м§Ғм ‘ нғҗмӮ¬н•ҳкё° м–ҙл Өмҡҙ н•ҙм–‘ нҷҳкІҪм—җм„ңлҠ” лЎңлҙҮкё°мҲ мқ„ нҷңмҡ©н•ҳм—¬ нғҗмӮ¬мһ„л¬ҙлҘј мҲҳн–үн•ңлӢӨ. лҢҖн‘ңм ҒмңјлЎң нҷңмҡ©лҗҳлҠ” лЎңлҙҮмқҖ мқҙлҸҷл°©мӢқм—җ л”°лқј н•ҙм Җ мЈјн–үмӢқ л°Ҹ н•ҙмӨ‘ мң мҳҒмӢқмңјлЎң лӮҳлҲҢ мҲҳ мһҲлӢӨ. н•ҙмӨ‘ мң мҳҒмӢқмқҳ лҢҖн‘ңм Ғмқё нҳ•нғңлЎң Remotely operated underwater vehicle(ROV)лӮҳ Autonomous underwater vehicle(AUV)лҘј л“Ө мҲҳ мһҲлӢӨ. мқҙл“ӨмқҖ м „л Ҙ кё°л°ҳмқҳ 추진мІҙ лӢӨмҲҳк°Җ мһҘм°©лҗҳм–ҙ мһҲмңјл©°, мҡҙмҳҒмқ„ нҶөн•ҙ мҲҳмӨ‘м—җм„ң мһҗмң мһҗмһ¬лЎң мқҙлҸҷн•ҳл©° мһ„л¬ҙлҘј мҲҳн–үн• мҲҳ мһҲлӢӨ. мқҙ к°ҷмқҖ н•ҙмӨ‘ мң мҳҒмӢқ лЎңлҙҮмқҖ м „л Ҙмқ„ л§Һмқҙ н•„мҡ”лЎң н•ҳкё° л•Ңл¬ём—җ л°°н„°лҰ¬к°Җ мһҘм°©лҗң кІҪмҡ° м •н•ҙ진 мҡҙмҳҒмӢңк°„ лҸҷм•Ҳл§Ң нғҗмӮ¬н•ҳкұ°лӮҳ мҷёл¶Җм—җм„ң м „л Ҙкіөкёүмқ„ л°ӣлҠ” кІҪмҡ° мјҖмқҙлё” кёёмқҙмқҳ м ңн•ңмңјлЎң м •н•ҙ진 кіөк°„ лӮҙм—җм„ңл§Ң нғҗмӮ¬лҘј н• мҲҳ мһҲлӢӨ.
л§Ңм•Ҫ, нғҗмӮ¬мһ„л¬ҙлҘј мҲҳн–үн•ҙм•јн• м§Җм—ӯмқҙ л„“кі , мһҘмӢңк°„ мҡҙмҳҒмқҙ н•„мҡ”н•ң кІҪмҡ° мҲҳмӨ‘ мң мҳҒмӢқ лЎңлҙҮмқҙ к°Җм§ҖлҠ” лӢЁм җмқ„ нҡҢн”јн•ҳкё° мң„н•ҙ кҙ‘лІ”мң„мқҳ мҳҒм—ӯмқ„ м Җм „л ҘмңјлЎң мһҘмӢңк°„ нғҗмӮ¬н• мҲҳ мһҲлҠ” мҲҳмӨ‘ кёҖлқјмқҙлҚ”лҘј нҷңмҡ©н• мҲҳ мһҲлӢӨ. мҲҳмӨ‘ кёҖлқјмқҙлҚ”лҠ” AUVмҷҖ 비мҠ·н•ң нҳ•нғңлҘј к°Җм§Җм§Җл§Ң лі„лҸ„мқҳ 추진мІҙк°Җ м—Ҷмңјл©° лӮҙл¶Җ л°°н„°лҰ¬мқҳ м „л ҘмңјлЎң л¶Җл Ҙм ңм–ҙлҘј нҶөн•ҙ мғҒмҠ№ лҳҗлҠ” н•ҳк°•мқҳ нһҳмқ„ мғқм„ұн•ҳм—¬ м Җм „л ҘмңјлЎң мҲҳмӨ‘ мң мҳҒмқ„ н• мҲҳ мһҲлӢӨ. н•ҳм§Җл§Ң мҲҳмӨ‘ кёҖлқјмқҙлҚ”лҠ” лі„лҸ„мқҳ мјҖмқҙлё”мқҙ м—°кІ°лҗҳм§Җ м•Ҡмңјл©° кё°ліёмӮ¬м–‘мқҳ кІҪмҡ° мҲҳмӨ‘ л¬ҙм„ нҶөмӢ мһҘм№ҳлҸ„ м—Ҷм–ҙм„ң мһ„л¬ҙлҘј мң„н•ң мһ н•ӯмқ„ мӢңмһ‘н•ҳл©ҙ л¶ҖмғҒн• л•Ңк№Ңм§ҖлҠ” мҡҙмҳҒмһҗк°Җ мғҒнғңлӮҳ мң„м№ҳ, нҡҚл“қн•ң м •ліҙ л“ұмқ„ нҢҢм•…н• мҲҳ м—ҶлӢӨ. мқҙл•ҢлҠ” мӢң뮬л Ҳмқҙм…ҳмқ„ нҶөн•ҙ мҲҳмӨ‘ кёҖлқјмқҙлҚ”мқҳ мғҒнғңлҘј м¶”м •н•ҙліј мҲҳ мһҲлӢӨ. мӢң뮬л Ҳмқҙм…ҳмқ„ мң„н•ҙм„ңлҠ” мҲҳмӨ‘ нҷҳкІҪ л°Ҹ мҲҳмӨ‘ кёҖлқјмқҙлҚ”м—җ лҢҖн•ң лҸҷм—ӯн•ҷ лӘЁлҚёл§Ғ м •лҰҪлҗҳм–ҙм•ј н•ҳл©°, мқҙлҘј мң„н•ҙ лӘЁлҚё 분м„қ л°Ҹ н•ӯл Ҙ лҸ„м¶ңмқҙ м„ н–үлҗҳм–ҙм•ј(Seo et al., 2008; Tan et. al, 2013) н•ңлӢӨ.
кё°мЎҙмқҳ м—°кө¬л“ӨмқҖ лҢҖмғҒмқҙ лҗҳлҠ” лӘЁлҚёмқҳ Вұ90В°мқҳ н”јм№ҳ к°Ғ мҳҒм—ӯм—җ лҢҖн•ҳм—¬ 10В°~30В° кө¬к°„ лі„лЎң н•ӯл Ҙкі„мҲҳлҘј лҸ„м¶ңн•ҳмҳҖлӢӨ. н•ҳм§Җл§Ң Slocum мҲҳмӨ‘ кёҖлқјмқҙлҚ”лҠ” мҲңн•ӯ мң мҳҒмӨ‘м—җ л°ӣмқҢк°ҒмқҖ 0В°лҘј кё°мӨҖмңјлЎң Вұ3В° мқҙлӮҙмқё кІғмқҙ мӢӨн—ҳм ҒмңјлЎң(Graver et al., 2003) лӮҳнғҖлӮ¬кё° л•Ңл¬ём—җ мҲңн•ӯ мң мҳҒмӨ‘мқё мғҒнғңлҘј мӢң뮬л Ҳмқҙм…ҳ н•ҳкё°м—җлҠ” мқҙ л°ӣмқҢк°Ғ мҳҒм—ӯмқ„ нҸ¬н•Ён•ң лҜёмҶҢ кө¬к°„м—җ лҢҖн•ҙ м •л°Җн•ң 분м„қмқҙ н•„мҡ”н•ҳлӢӨ.
ліё л…јл¬ём—җм„ңлҠ” Slocum мҲҳмӨ‘ кёҖлқјмқҙлҚ” лӘЁлҚёмқ„ лҢҖмғҒмңјлЎң мң мҳҒ л°ӣмқҢк°Ғм—җ лҢҖн•ң н•ӯл Ҙкі„мҲҳлҘј лҸ„м¶ңн•ҳкё° мң„н•ҙ лЁјм Җ мӢӨмёЎ кё°л°ҳмңјлЎң 3D лӘЁлҚёмқ„ кө¬нҳ„н•ҳмҳҖкі , нҠ№м • мҶҚлҸ„лЎң мҲңн•ӯ мң мҳҒ мӨ‘мқҳ нҷҳкІҪмЎ°кұҙ л°Ҹ м Ғм •кө¬к°„м—җ лҢҖн•ң л°ӣмқҢк°Ғмқ„ м„Өм •н•ҳм—¬ м „мӮ°мң лҸҷн•ҙм„қмқ„ мҲҳн–үн•ҳмҳҖмңјл©°, л°ӣмқҢк°Ғ ліҖнҷ”м—җ л”°лҘё н•ӯл Ҙкі„мҲҳмқҳ ліҖнҷ”м—җ лҢҖн•ҙ м—°кө¬н•ҳмҳҖлӢӨ.
2. мҲҳмӨ‘ кёҖлқјмқҙлҚ” лӘЁлҚё л°Ҹ м „мӮ°мң лҸҷн•ҙм„қ нҷҳкІҪмЎ°кұҙ
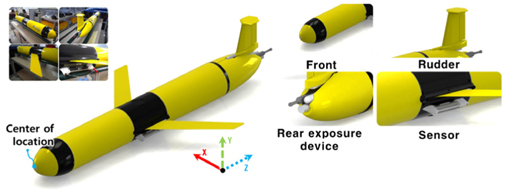
2.1 мҲҳмӨ‘ кёҖлқјмқҙлҚ” лӘЁлҚё

2.2 м „мӮ°мң лҸҷн•ҙм„қ нҷҳкІҪмЎ°кұҙ
мҲҳмӨ‘ кёҖлқјмқҙлҚ”мқҳ мғҒм„ёмӮ¬м–‘мқҖ м „мҡ© л§Өлүҙм–ј(Teledyne, 2012)м—җ м ңмӢңлҗҳм§Җ м•Ҡкё° л•Ңл¬ём—җ м „мҡ© л§Өлүҙм–јм—җ м ңмӢңлҗң кё°ліёмӮ¬м–‘кіј мӢӨмёЎлҗң 3D лӘЁлҚёмқ„ м°ёкі н•ҳм—¬ мғҒм„ёмӮ¬м–‘мқ„ лҸ„м¶ңн•ҳмҳҖлӢӨ. к·ёлҹ¬лҜҖлЎң ліё мӮ¬м–‘мқҖ мӢӨм ң м ңн’Ҳкіј мӮ¬м–‘мқҙ лӢӨлҘј мҲҳ мһҲлӢӨ.
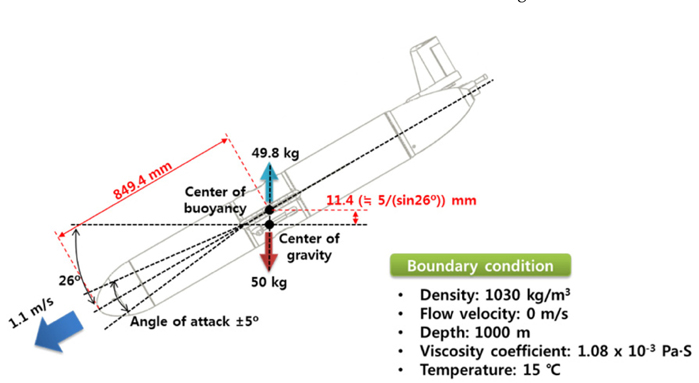
мҲҳмӨ‘ кёҖлқјмқҙлҚ”мқҳ мҲңн•ӯ мғҒнғңлҠ” мһҗмІҙ мӨ‘л Ҙкіј л¶Җл Ҙм—җ мқҳн•ҙ к·ё мһҗм„ёк°Җ кІ°м •мқҙ лҗҳлҠ”лҚ°, мқҙ лҳҗн•ң л§Өлүҙм–јмқ„ м°ёкі н•ҳмҳҖлӢӨ. Fig. 2мҷҖ к°ҷмқҙ н•ҳк°• мӨ‘ мһҗм„ёк°Җ 26В°мқҳ кё°мҡём–ҙм§Җл©°, мҲңн•ӯ мӨ‘ л°ӣмқҢк°ҒмқҖ Вұ5В° мқҙлӮҙлқј м„Өм •н•ҳмҳҖлӢӨ. Slocum мҲҳмӨ‘ кёҖлқјмқҙлҚ”лЎң лӘҮ к°Җм§Җ мғҒнғңм—җ лҢҖн•ҳм—¬ мӢӨн—ҳм ҒмңјлЎң лҸ„м¶ңлҗң кІ°кіј(Joshua et al., 2003)лҘј ліҙл©ҙ мҲңн•ӯ мң мҳҒмӨ‘м—җ л°ӣмқҢк°ҒмқҖ Вұ3В° лӮҙмҷёмһ„мқ„ ліҙмҳҖкё° л•Ңл¬ём—җ мқҙ кө¬к°„мқ„ нҸ¬н•Ён•ң лҜёмҶҢ кө¬к°„м—җ лҢҖн•ҙ м •л°Җн•ң 분м„қмқҙ н•„мҡ”н•ҳмҳҖкі ліё л…јл¬ём—җм„ңлҠ” л°ӣмқҢк°Ғмқҳ кө¬к°„мқ„ Вұ5В° мқҙлӮҙлЎң м„Өм •н•ҳмҳҖлӢӨ. к·ёлҰ¬кі мҲңн•ӯ мң мҳҒмӨ‘мқҳ мҶҚл ҘмқҖ 1.1m/sлЎң мһ„мқҳ м„Өм •н•ҳмҳҖлӢӨ. к·ё мҷё н•ҙм Җ нҷҳкІҪм—җ лҢҖн•ң мЎ°кұҙмңјлЎңм„ң л°ҖлҸ„, м••л Ҙ, м җм„ұ л“ұм—җ лҢҖн•ҙ м„Өм •н•ҳмҳҖлӢӨ.
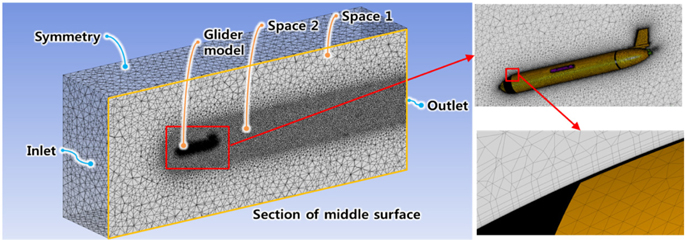
м „мӮ°мң лҸҷн•ҙм„қмқ„ мң„н•ң л©”мү¬лҠ” ANSYS мҶҢн”„нҠёмӣЁм–ҙлҘј мӮ¬мҡ©н•ҳм—¬ м„Өкі„н•ҳмҳҖлӢӨ. л©”мү¬лҠ” н•ҙм„қ нҡЁмңЁм„ұмқ„ мң„н•ҙ л©ҙмқҳ мЎ°л°ҖлҸ„лҘј кіөк°„лі„лЎң лӢӨлҘҙкІҢ м„Өм •н•ҳлҠ” л°©лІ•мңјлЎң Fig. 3кіј к°ҷмқҙ м„Өкі„н•ҳмҳҖлӢӨ. лЁјм Җ н•ҙм„қ кіөк°„мқ„ мҲҳмӨ‘ кёҖлқјмқҙлҚ” лӘЁлҚём—җ к·јм ‘н•ң мҳҒм—ӯкіј лӮҳлЁём§Җ мҳҒм—ӯ л‘җк°Җм§ҖлЎң лӮҳлҲ„м—ҲлӢӨ. лӘЁлҚёмқҳ кІ©мһҗ нҒ¬кё°лҠ” нҳ‘мҶҢн•ҳкұ°лӮҳ ліөмһЎн•ң л¶Җ분мқё лӮ к°ңмқҳ лӘЁм„ңлҰ¬ л¶Җ분과 нӣ„лҜёл¶ҖлҘј кі л Өн•ҳмҳҖкі , мң мІҙм—җ м§Ғм ‘м ҒмңјлЎң мҳҒн–Ҙмқ„ мЈјлҠ” л¶Җ분мқҙкё° л•Ңл¬ём—җ кІ©мһҗк°Җ к°ҖмһҘ мЎ°л°Җн•ҳлҸ„лЎқ м„Өм •н•ҳм—¬м•ј н•ңлӢӨ. н•ҳм§Җл§Ң кІ©мһҗмҲҳк°Җ л§Һмңјл©ҙ н•ҙм„қмӢңк°„м—җ мҳҒн–Ҙмқ„ мЈјкё° л•Ңл¬ём—җ л°ҳліөм Ғмқё н…ҢмҠӨнҠёлҘј нҶөн•ҙ кІ©мһҗ нҒ¬кё°лҘј 4mm мқҙн•ҳлЎң м„Өм •н•ҳмҳҖлӢӨ. к·ёлҰ¬кі лӘЁлҚём—җ к·јм ‘н•ң мҳҒм—ӯмқҖ мң лҸҷмқҳ нқҗлҰ„мқҙ м•Ҳм •м Ғмқҙм§Җ м•Ҡкі мҷҖлҘҳк°Җ л°ңмғқн• кІғмңјлЎң ліҙмқҙлҠ” кҙҖмӢ¬ мҳҒм—ӯмқҙкё° л•Ңл¬ём—җ 100mm мқҙн•ҳмқҙлҸ„лЎқ м„Өм •н•ҳмҳҖлӢӨ. лӮҳлЁём§Җ мҳҒм—ӯмқҳ кІ©мһҗлҠ” к·јм ‘н•ң мҳҒм—ӯмқҳ м•Ҳм •м Ғмқҙм§Җ м•ҠмқҖ мң лҸҷмқҳ нқҗлҰ„мқ„ мҷ„충мӢңнӮӨл©ҙм„ң н•ҙм„қмқҳ нҡЁмңЁмқ„ лҶ’мқј мҲҳ мһҲлҸ„лЎқ 400mm мқҙн•ҳмқҙлҸ„лЎқ м„Өм •н•ҳмҳҖлӢӨ. к·ёлҰ¬кі Inletкіј OutletмқҖ к°Ғк°Ғ лӘЁлҚёмқҳ м •л©ҙкіј нӣ„л©ҙ л°©н–ҘмңјлЎң кёҙ н•ҙм„қкіөк°„ м–‘л©ҙм—җ м§Җм •н•ҳмҳҖлӢӨ. лӢӨл§Ң, лӘЁлҚёмқҳ м •л©ҙмқ„ кё°мӨҖмңјлЎң нҠ№м • л°ӣмқҢк°Ғ л§ҢнҒј н”јм№ҳ л°©н–ҘмңјлЎң кё°мҡём–ҙ м§ҖлҸ„лЎқ м„Өм •н•ҳм—¬ лӘЁлҚёмқҙ нҠ№м • л°ӣмқҢк°Ғ л°©н–ҘмңјлЎң мҲңн•ӯ мң мҳҒмқ„ н•ҳл©ҙ л°ҳлҢҖмқҳ л°©н–ҘмңјлЎң мғҒлҢҖм Ғ мң мҶҚмқҙ л°ңмғқн•ҳлҠ” нҷҳкІҪмқ„ кө¬нҳ„н•ҳмҳҖлӢӨ.
3. мҲҳмӨ‘ кёҖлқјмқҙлҚ” л°ӣмқҢк°Ғм—җ лҢҖн•ң м „мӮ°мң лҸҷн•ҙм„қ кІ°кіј
м „мӮ°мң лҸҷн•ҙм„қ мҶҢн”„нҠёмӣЁм–ҙлҠ” ANSYSмқҳ FLUENTлҘј мӮ¬мҡ©н•ҳмҳҖмңјл©° м•„лһҳмҷҖ к°ҷмқҙ н•ҙм„қ мЎ°кұҙмқ„ м„Өм •н•ҳмҳҖлӢӨ. мң мҳҒ л°©н–Ҙмқ„ кё°мӨҖмўҢн‘ңкі„лЎң м„Өм •н•ң кІғмқҖ мң мҳҒ л°©н–Ҙмқҙ кі§ л°ӣмқҢк°Ғмқҙкё° л•Ңл¬ём—җ мқҙлҘј кё°мӨҖ мўҢн‘ңкі„лЎң м„Өм •н•ҳкі лӘЁлҚёмқ„ л°ӣмқҢк°Ғ л§ҢнҒј н”јм№ҳ л°©н–ҘмңјлЎң кё°мҡёмқҙл©ҙм„ң н•ҙм„қ кіөк°„мқ„ м„Өм •н•ҳл©ҙ л°ҳліөм Ғмқё н•ҙм„қ мһ‘м—…мқ„ мҲҳн–үн•ҳлҠ”лҚ° нҺёмқҳлҘј к°Җм§Ҳ мҲҳ мһҲлӢӨ. к·ёлҰ¬кі кІ©мһҗ кө¬м„ұмқҖ ліөмһЎн•ң нҳ•мғҒм—җ мң лҰ¬н•ң tetra/prism нғҖмһ…мқҳ кІ©мһҗлҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. к·ёлҰ¬кі л¬јмқҖ 압축мңЁмқҖ 3.3 Г— 10-10 Pa-1 м •лҸ„лЎң л§Өмҡ° лӮ®кё° л•Ңл¬ём—җ н•ҙм„қ кіөк°„мқҳ мң мІҙлҠ” мӢңк°„м Ғмқё нҡЁмңЁмқ„ мң„н•ҙ 비 압축м„ұ мң мІҙлқј к°Җм •н•ҳмҳҖлӢӨ. лӮңлҘҳлӘЁлҚёмқҖ м •мғҒ мң лҸҷмһҘ н•ҙм„қм—җм„ң лӢӨлҘё лӮңлҘҳ лӘЁлҚём—җ 비н•ҙ 비көҗм Ғ мҡ°мҲҳн•ң м„ұлҠҘмқ„ к°Җ진 Shear-stress transport(SST) лӘЁлҚёмқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ.
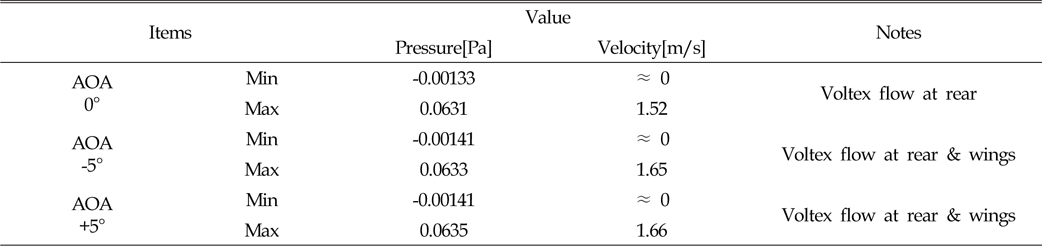
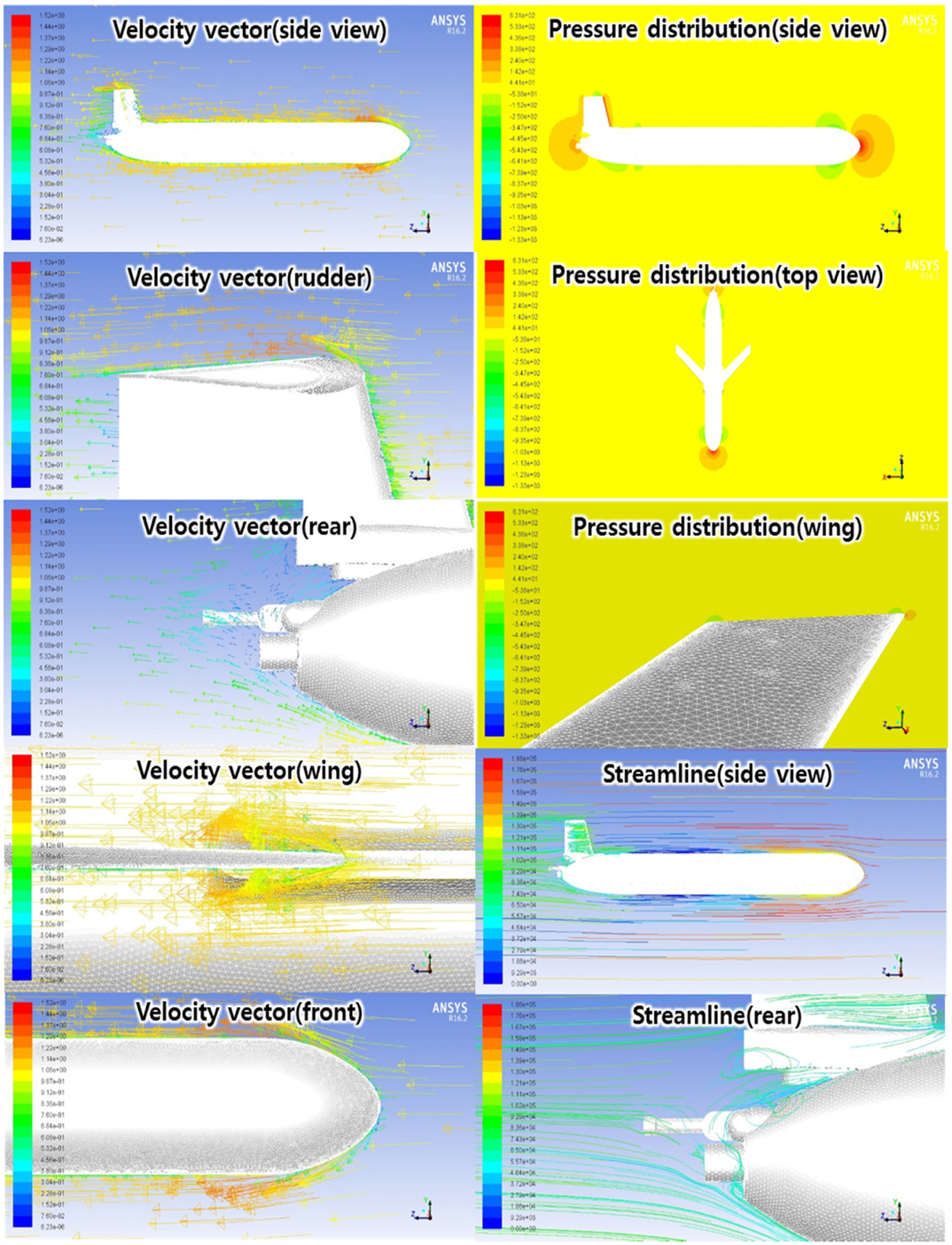
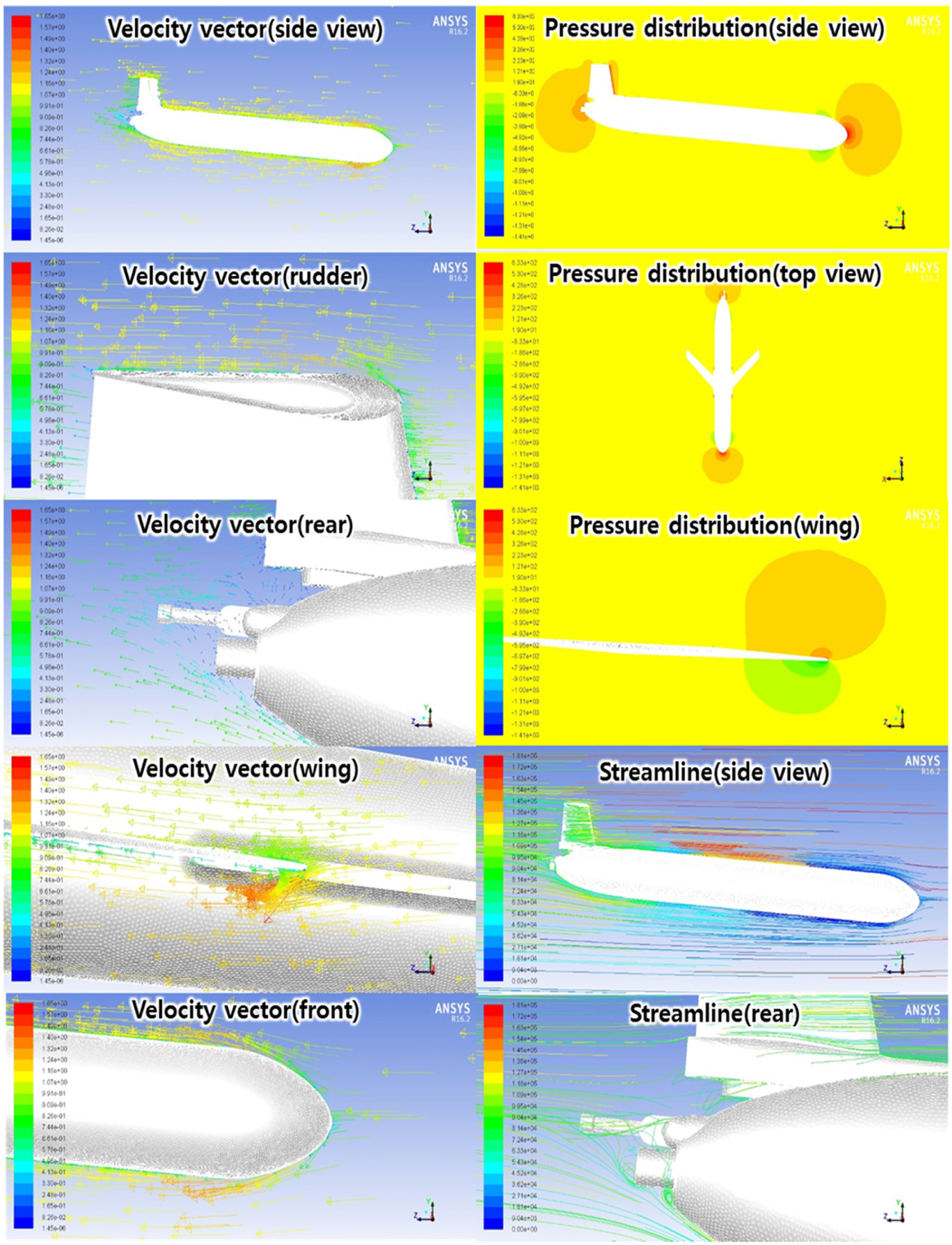
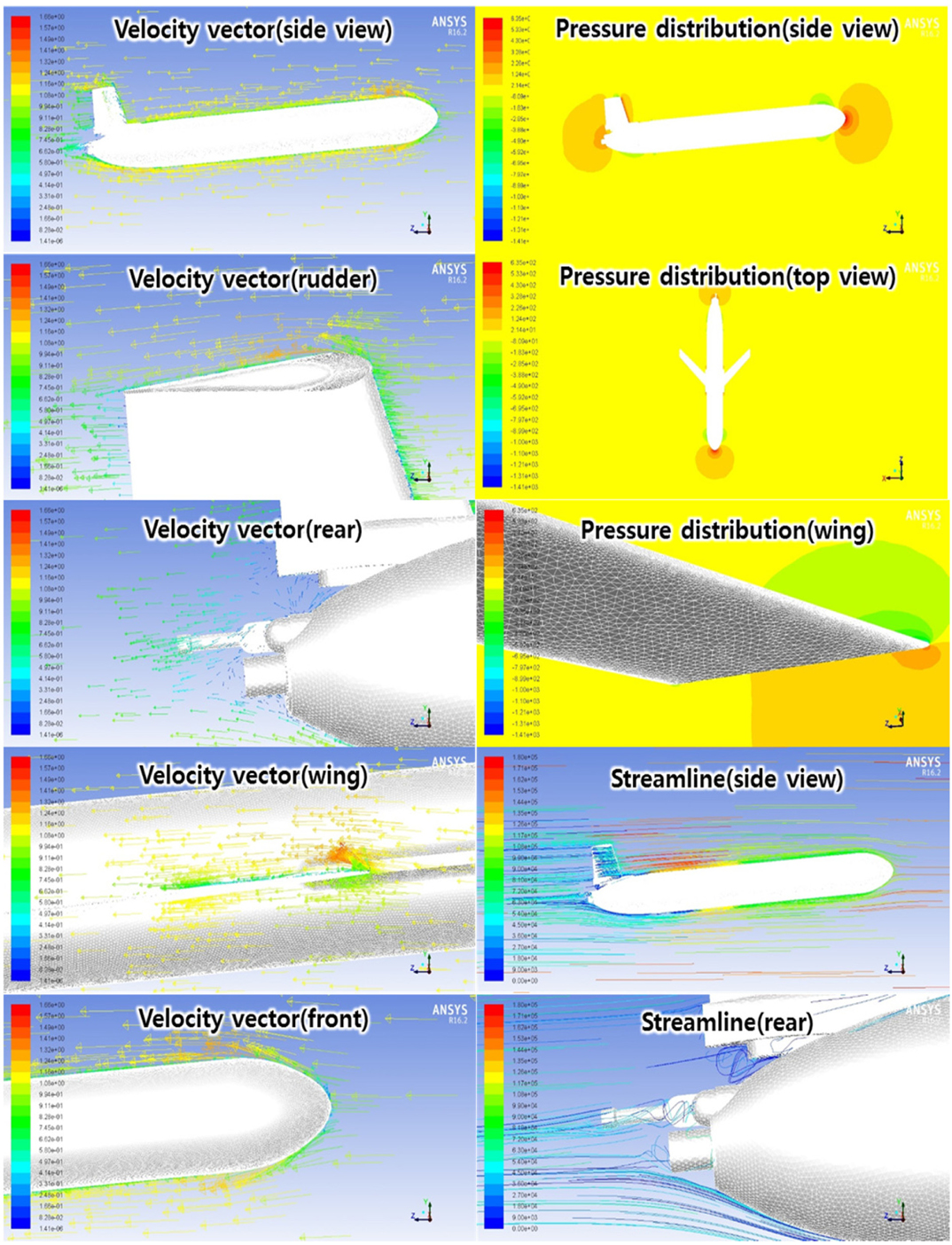
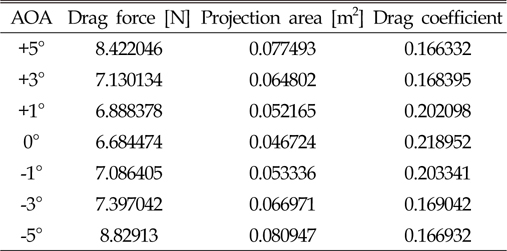
мң„ н•ҙм„қмЎ°кұҙмқ„ нҶ лҢҖлЎң л°ӣмқҢк°Ғ +5В°, +3В°, +1В°, 0В°, -1В°, -3В° -5В°м—җ лҢҖн•ҙ м „мӮ°мң лҸҷн•ҙм„қмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. к·ё мӨ‘ +5В°, 0В°, -5В°м—җ лҢҖн•ң кіөк°„мғҒмқҳ кІ°кіјлҠ” Fig. 4, 5, 6кіј к°ҷлӢӨ. к·ёлҰ¬кі мҲҳм№ҳм Ғ мөңлҢҖ/мөңмҶҢ кІ°кіј к°’мқҖ Table 2кіј к°ҷлӢӨ. к°Ғ кІҪмҡ°м—җ лҢҖн•ҙ мӮҙнҺҙліҙл©ҙ л°ӣмқҢк°Ғмқҙ 0В°мқј л•Ң лӘЁлҚёмқҳ м „л©ҙл¶Җ л°Ҹ лӮ к°ңмқҳ м „л©ҙл¶Җм—җ мғҒлҢҖм ҒмңјлЎң лҶ’мқҖ м••л Ҙмқҙ мһ‘мҡ©н•ҳлҠ” кІғмқ„ ліј мҲҳ мһҲлӢӨ. к·ёлҰ¬кі лӘЁлҚёмқҳ нӣ„лҜёл¶Җм—җлҸ„ мғҒлҢҖм ҒмңјлЎң лҶ’мқҖ м••л Ҙмқҙ кұёлҰ¬лҠ” кІғмқ„ ліј мҲҳ мһҲлҠ”лҚ° мҶҚл Ҙ 분нҸ¬лҘј мӮҙнҺҙліҙл©ҙ нӣ„лҜёл¶Җ мЈјліҖм—җм„ң л§ӨлҒ„лҹҪм§Җ лӘ»н•ң нҳ•мғҒмңјлЎң мқён•ҙ Fig. 5мҷҖ к°ҷмқҙ мҷҖлҘҳк°Җ л°ңмғқн•ҳл©ҙм„ң мЈјліҖм—җ 비н•ҙ мҶҚлҸ„к°Җ мғҒлҢҖм ҒмңјлЎң лӮ®м•„м§Җкі мқҙм—җ л”°лқј м••л Ҙмқҙ мҳ¬лқјк°„ кІғмңјлЎң ліј мҲҳ мһҲлӢӨ. мқҙ нӣ„лҜёл¶Җмқҳ мҷҖлҘҳм—җ мқҳн•ң м••л ҘмқҖ мҲҳмӨ‘ кёҖлқјмқҙлҚ”к°Җ мң мҳҒн•ҳлҠ”лҚ° м Җн•ӯл ҘмңјлЎң мһ‘мҡ©н•ҳлҠ” кІғмңјлЎң ліј мҲҳ мһҲлӢӨ. л°ӣмқҢк°Ғмқҙ -5В°мҷҖ +5В°мқј л•ҢлҠ” 0В°мқј л•ҢмҷҖ л§Ҳм°¬к°Җм§ҖлЎң мҷҖлҘҳм—җ мқҳн•ҙ нӣ„лҜёл¶Җмқҳ м••л Ҙмқҙ нҳ•м„ұлҗЁмқ„ ліј мҲҳ мһҲлӢӨ. к·ёлҰ¬кі к·ёлҰјм—җлҠ” лӮҳмҳӨм§Җ м•Ҡм§Җл§Ң лӮ к°ңмқҳ мң„/м•„лһҳлЎң мғҒлҢҖм ҒмңјлЎң лҶ’мқҖ м••л Ҙмқҙ нҳ•м„ұлҗҳм—Ҳкі , лӮ к°ң лҒқлӢЁмқҳ л’·л¶Җ분м—җлҸ„ м•Ҫк°„мқҳ мҷҖлҘҳнҳ„мғҒмқҙ л°ңмғқлҗЁмқ„ ліј мҲҳ мһҲм—ҲлӢӨ. к·ё мҷём—җлҠ” лӘЁлҚё мЈјмң„лЎң нқҗлҰ„м—җ лҢҖн•ң мң м„ мқҙ лҢҖмІҙлЎң к· мқјн•ҳкІҢ лӮҳнғҖлӮ¬лӢӨ.
4. мҲҳмӨ‘ кёҖлқјмқҙлҚ” л°ӣмқҢк°Ғм—җ лҢҖн•ң н•ӯл Ҙкі„мҲҳ
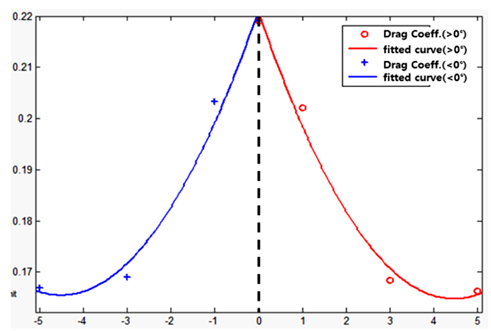
м „мӮ°мң лҸҷн•ҙм„қмқ„ нҶөн•ҙ лҸ„м¶ңн•ң н•ӯл Ҙкі„мҲҳлҠ” Table 3кіј к°ҷлӢӨ. мқҙ кІ°кіјлҠ” мӢӨн—ҳм ҒмңјлЎң лҸ„м¶ңлҗң кІ°кіј(Joshua et al., 2003)мҷҖ 비көҗн•ҳмҳҖмқ„ л•Ң л°ӣмқҢк°Ғ -3В°лҘј мҳҲлҘј л“Өл©ҙ м•Ҫ -0.14 м •лҸ„мқҳ нҒ° м°ЁмқҙлҘј ліҙмқёлӢӨ. мқҙлҠ” н•ӯл Ҙкі„мҲҳмҷҖ мҶҚлҸ„лҠ” л°ҳ비лЎҖ кҙҖкі„лҘј к°Җм§Җкё° л•Ңл¬ём—җ(Pijush and Ira, 2010) мӢӨн—ҳм—җм„ңмқҳ мҶҚлҸ„мҷҖ ліё л…јл¬ём—җм„ң к°Җм • н•ң мҶҚлҸ„к°Җ лӢӨлҘҙкё° л•Ңл¬ём—җ мқҙлҹ¬н•ң м°ЁмқҙлҘј к°Җм§ҖлҠ” кІғмңјлЎң ліј мҲҳ мһҲлӢӨ. мқҙм ң мҲҳмӨ‘ кёҖлқјмқҙлҚ” л°ӣмқҢк°Ғмқҳ ліҖнҷ”м—җ л”°лҘё н•ӯл Ҙкі„мҲҳмқҳ ліҖнҷ”лҘј мӢқмңјлЎң н‘ңнҳ„н•ҳкі мһҗ н•ҳлҠ”лҚ° мқјл°ҳм ҒмңјлЎң м•Ңл Ө진 н•ӯл Ҙкі„мҲҳмҷҖ л ҲмқҙлҶҖмҰҲ мҲҳмқҳ кҙҖкі„мӢқмқҖ кө¬мқҳ нҳ•нғңм—җ н•ңн•ҙм„ң лҸ„м¶ңн•ң мӢқмқёлҚ°лӢӨ л ҲмқҙлҶҖмҰҲмқҳ мҲҳлҘј кө¬н•ҳл©ҙ мқҳ к°’мқ„ к°Җм§җмңјлЎңм„ң н•ӯкіөкё°мҷҖ к°ҷмқҙ кі мҶҚмқҳ лӘЁлҚём—җ м Ғн•©н•ң л§Ҳн•ҳ мҲҳлҘј лӢӨлЈЁм–ҙм•ј н•ҳкё° л•Ңл¬ём—җ ліё лӘЁлҚём—җлҠ” м Ғн•©н•ҳм§Җ м•ҠлӢӨ(Ahmadi, 2004; Polezhaev and Chircov, 2011; Morrison, 2013). к·ёлһҳм„ң ліё л…јл¬ём—җм„ңлҠ” мӢқ (1)кіј к°ҷмқҖ 2м°ЁмӢқм—җ MATLABмқҳ м»ӨлёҢн”јнҢ…(Curve fitting) нҲҙмқ„ мқҙмҡ©н•ҳм—¬ н•ӯл Ҙкі„мҲҳмқҳ ліҖнҷ”лҘј мӢқмңјлЎң н‘ңнҳ„н•ҳкі мһҗ н•ңлӢӨ(Tan et. al, 2013).

м—¬кё°м„ң, ОёaлҠ” л°ӣмқҢк°Ғмқҙл©°, K1, K2, K3лҠ” кө¬н•ҳкі мһҗ н•ҳлҠ” кі„мҲҳмқҙлӢӨ.
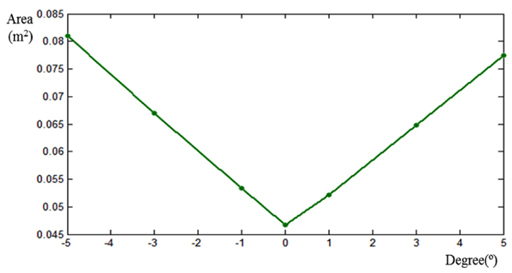
н•ӯл Ҙкі„мҲҳмқҳ ліҖнҷ”лҘј мӮҙнҺҙліҙл©ҙ л°ӣмқҢк°Ғ 0В°лҘј кё°мӨҖмңјлЎң лҢҖм№ӯмқҳ м–‘мғҒмқ„ ліҙмқёлӢӨ. н•ҳм§Җл§Ң к·ё к°’мқ„ лҢҖм№ӯмңјлЎң 비көҗн•ҙ ліҙл©ҙ лҜём„ён•ҳм§Җл§Ң м°ЁмқҙлҘј ліҙмқҙкі мһҲлӢӨ. к·ёлҰ¬кі Fig. 7кіј к°ҷмқҙ л°ӣмқҢк°Ғм—җ лҢҖн•ң мӮ¬мҳҒл©ҙм Ғмқҳ ліҖнҷ”лҘј ліҙл©ҙ л°ӣмқҢк°Ғ 0В°м—җм„ң л№„м„ нҳ•м Ғмқё м–‘мғҒмқ„ ліҙмқёлӢӨ. к·ёлһҳм„ң н•ӯл Ҙкі„мҲҳмқҳ ліҖнҷ”лҘј м„ нҳ•нҷ” н•ҳлҠ”лҚ° л°ӣмқҢк°Ғ 0В°лҘј кё°мӨҖмңјлЎң мҳҒм—ӯ л‘ҳлЎң лӮҳлҲ„м–ҙ к°Ғк°Ғмқҳ мӢқмқ„ кө¬н•ҳмҳҖмңјл©° м»ӨлёҢн”јнҢ…мқ„ нҶөн•ҙ кө¬н•ң мӢқмқҳ кі„мҲҳмҷҖ кІ°кіјлҠ” Table 4мҷҖ Fig. 8кіј к°ҷлӢӨ.

5. кІ° лЎ
мҲҳмӨ‘ кёҖлқјмқҙлҚ”мқҳ мӢ мҶҚн•ң нҡҢмҲҳлҘј мң„н•ҙм„ңлҠ” л¶ҖмғҒн• кІғмңјлЎң мҳҲмғҒлҗҳлҠ” мң„м№ҳлҘј мӢң뮬л Ҳмқҙм…ҳмқ„ нҶөн•ҙ м¶”м •н•ҳлҠ” л°©лІ•мқҙ мһҲлҠ”лҚ° мқҙ мӢң뮬л Ҳмқҙм…ҳмқ„ мң„н•ҙм„ңлҠ” мҲҳмӨ‘ нҷҳкІҪ л°Ҹ мҲҳмӨ‘ кёҖлқјмқҙлҚ”м—җ лҢҖн•ң лҸҷм—ӯн•ҷм Ғ лӘЁлҚёл§Ғмқҙ н•„мҡ”н•ҳлӢӨ. мқҙ лҸҷм—ӯн•ҷм Ғ лӘЁлҚёмқ„ м„ёмҡ°кё° мң„н•ң кё°л°ҳ м—°кө¬ мӨ‘мқҳ н•ҳлӮҳлЎң лӘЁлҚём—җ лҢҖн•ң н•ӯл Ҙкі„мҲҳлҘј лҸ„м¶ңн•ҳлҠ” м—°кө¬к°Җ н•„мҡ”н•ңлҚ°, ліё л…јл¬ёмқ„ нҶөн•ҙм„ң Slocum мҲҳмӨ‘ кёҖлқјмқҙлҚ”мқҳ м „мӮ°мң лҸҷн•ҙм„қмқ„ нҶөн•ҙ н•ӯл Ҙкі„мҲҳм—җ лҢҖн•ң мӢқмқ„ лҸ„м¶ңн•ҳлҠ” м—°кө¬лҘј мҲҳн–үн•ҳмҳҖлӢӨ. лЁјм Җ мӢӨмёЎ кё°л°ҳмңјлЎң мҲҳмӨ‘ кёҖлқјмқҙлҚ”мқҳ 3D лӘЁлҚёмқ„ м„Өкі„н•ҳкі мқҙлҘј 분м„қн•ҳмҳҖлӢӨ. к·ёлҰ¬кі мҲңн•ӯ мң мҳҒ мғҒнғңмҷҖ нҷҳкІҪмЎ°кұҙмқ„ к°Җм •н•ҳм—¬ н•ҙм„қнҷҳкІҪмқ„ м„Өм •н•ҳмҳҖкі л°ӣмқҢк°Ғ Вұ5В° лІ”мң„ мқҙлӮҙм—җ лҢҖн•ҙ ANSYS FLUENTлҘј мқҙмҡ©н•ҙ к°ҒлҸ„лі„ м „мӮ°мң лҸҷн•ҙм„қмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. л§Ҳм§Җл§үмңјлЎң н•ҙм„қкІ°кіј лҸ„м¶ңлҗң н•ӯл Ҙкі„мҲҳ к°’мқ„ нҶ лҢҖлЎң MATLAB м»ӨлёҢн”јнҢ… нҲҙмқ„ мқҙмҡ©н•ҳм—¬ л°ӣмқҢк°Ғмқҳ ліҖнҷ”м—җ лҢҖн•ң н•ӯл Ҙкі„мҲҳмқҳ ліҖнҷ”лҘј мӢқмңјлЎң н‘ңнҳ„н•ҳмҳҖлӢӨ.
추нӣ„м—җлҠ” мҶҚлҸ„мқҳ ліҖнҷ”м—җ лҢҖн•ң н•ӯл Ҙкі„мҲҳмқҳ ліҖнҷ” м–‘мғҒмқ„ 분м„қн•ҳкі мқҙлҘј ліё л…јл¬ёмқҳ кІ°кіјмҷҖ мңөн•©н•ҳм—¬ к°ҒлҸ„мҷҖ мҶҚлҸ„м—җ лҢҖн•ҙ м„ нҳ•нҷ”лҗң н•ӯл Ҙкі„мҲҳ мӢқмқ„ кө¬н•ҳлҠ” м—°кө¬лҘј мҲҳн–үн•ҳлҸ„лЎқ н•ҳкІ лӢӨ. к·ёлҰ¬кі мқҙлҘј нҶ лҢҖлЎң мҲҳмӨ‘ кёҖлқјмқҙлҚ”мқҳ лҸҷм—ӯн•ҷм Ғ лӘЁлҚёмӢқм—җ м Ғмҡ©н•ҳм—¬ мһ н•ӯ нӣ„ л¶ҖмғҒн•ҳкё°к№Ңм§Җмқҳ кІҪлЎң л°Ҹ мғҒнғңлҘј мӢң뮬л Ҳмқҙм…ҳн•ҳкі л¶ҖмғҒмң„м№ҳлҘј м¶”м •н•ҳлҠ” м—°кө¬лҘј мҲҳн–үн•ҳлҸ„лЎқ н•ҳкІ лӢӨ.




