요소항력모델을 활용한 선저검사용 ROV 모델링 및 트래킹 시뮬레이션
Modeling and Tracking Simulation of ROV for Bottom Inspection of a Ship using Component Drag Model
Article information
Abstract
The large drift and angle of attack motion of an ROV (Remotely operated vehicle) cannot be modeled using the typical hydrodynamic coefficients of conventional straight running AUVs and specific slender bodies. In this paper, the ROV hull is divided into several simple-shaped components to model the hydrodynamic force and moment. The hydrodynamic force and moment acting on each component are modeled as the components of added mass force and drag using the known values for simple shapes such as a cylinder and flat plate. Since an ROV is operated under the water, the only environmental force considered is the current effect. The target ROV dealt with in this paper has six thrusters, and it is assumed that its maneuvering motion is determined using a thrust allocation algorithm. Tracking simulations are carried out on the ship’s surface near the stern, bow, and midship sections based on the modeling of the hydrodynamic force and current effect.
1. 서 론
유가상승 또는 친환경성에 따른 선박효율 문제가 이슈가 되고 있으므로 선박저항을 줄이려는 노력이 계속되고 있다. 이 때 선박에 작용하는 저항의 상당부분이 마찰저항이라고 알려져 있다. 이러한 마찰저항은 흘수 아래 선체표면에 부착된 해양생물 등에 의해 58-68%까지 증가하고 이로 인한 연료소모는 최대 40%까지 증가하는 것으로 알려져 있다(Lee and Park, 2013). 부착된 해양생물 검사를 비롯한 선체검사는 대형선박에 대해서는 잠수부의 작업 위험을 줄이기 위해 AUV(Autonomous underwater vehicle)와 ROV(Remotely operated vehicle) 등의 수중운동체가 시행하는 빈도가 증가하고 있다(Choi et al., 2009). 프랑스 Cybernetix사가 쌍축 추진 AUV 형태로 선체검사로봇을 개발하여 선체검사 및 청소임무를 수행하고, 국내에서는 고속회전이 가능한 브러쉬를 적용하여 선저검사 및 청소를 수행하는 ROV 형태의 수중로봇이 개발되었다(Choi et al., 2009; Kim, 2009). 선저검사용 수중로봇의 수요가 증가하는 가운데, 수중로봇의 6자유도 운동제어를 효율적으로 수행하기 위한 시스템의 동역학 해석은 필수적이다.
일반적으로 AUV와 같은 세장체 형상을 띄고 선미에 부착된 핀으로 운동제어를 수행하는 시스템에 대해서는 잠수 함 표준운동방정식에 기술된 선체, 핀, 추진기에 대한 조종성미계수로 외력을 모델링하며, 이를 구하기 위한 방법으로 수조에서 수직면 운동장치시험을 수행하거나 전산유체역학 등의 수치해석방법이 적용된다(Feldman, 1979; Gertler and Hagen, 1967; Prestero, 2001; Seol et al.,2005). 반면에 ROV와 같은 다수의 추진기를 활용하여 조종운동을 구현하는 경우, 운동체의 편류각에 대한 특정한계치가 정해진 AUV와는 달리 대앙각운동과 횡이동 및 상하이동이 자유로운 운동특성을 지니며 대략 2m/s(4knots) 이하의 속력으로 운용된다. 그러므로 ROV에 작용하는 동유체력은 편류각이 작다는 가정하에서 유효한 조종성미계수로 모델링하게 되면 대앙각, 횡이동 및 상하이동시에는 적절하게 결과를 반영할 수 없다. 이러한 이유로 ROV 조종운동 시 작용하는 동유체력으로 모리슨 방정식을 적용하여 부가질량력과 각 축에 대한 항력으로 모델링하는 것이 합당하다고 할 수 있으며, 본 논문에서는 전진방향 항력을 포함한 3개의 병진운동에 대한 항력계수를 전체 운동체에 대해 단순화된 형상의 요소로 분할하여 모델링하였고, 이를 요소항력모델(CDM, Component drag model)로 정의하였다.
요소항력모델의 유효성을 검증하기 위하여 전체 형상에 대한 항력계수를 전산유체역학 해석에서 추정하고 동일한 조종시뮬레이션을 수행하였으며, 이를 통하여 항력계수 추정 오차에 따른 운동 결과 차이도 살펴보았다. 본 논문에서는 형상적으로 해석하기 복잡하고, 모형시험기법이 정립되지 않은 복잡형상 ROV에 대해 초기설계단계에서 조종성능을 해석하고자 할 때, 대략적인 동적특성을 추정하는 방법을 제시하고자 한다.
2. 동역학 모델링
2.1 ROV 좌표계 및 조종운동방정식
해석에 적용된 ROV는 Fig. 1과 같이 6개의 추진기로 병진운동 및 자세각 변화를 자유롭게 줄 수 있는 호버링형으로서 주요제원은 Table 1과 같다. ROV 중앙 상부에 설치된 카메라를 활용하여 선체표면을 검사 및 촬영하는 것이 주 운용목적이다. 좌표계는 ROV 운동변수와이에 작용하는 유체력을 표현하기 위한 ROV 고정좌표계와 ROV 궤적과 자세각을 표현하기 위한 지구고정좌표계로 구성하고 좌표계간의 운동학적 변환은 321 오일러 변환을 적용한다(Fossen, 1994).
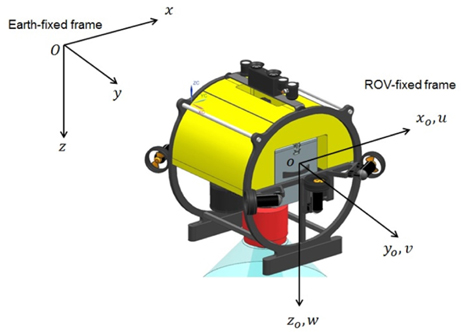
Coordinate systems
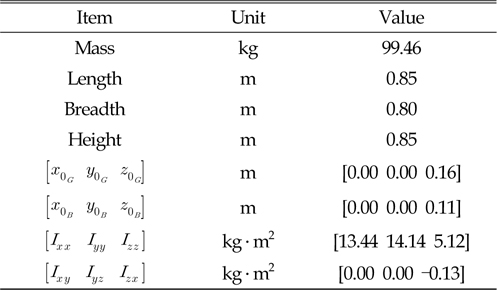
Principal dimensions of ROV
Newton 제2법칙을 적용하여 ROV 고정좌표계에서 기술된 6 자유도 조종운동방정식은 식 (1)과 같이 3개의 병진운동방정식과 3개의 회전운동방정식으로 구성된다.

여기서 m, I는 각각 ROV 질량, 질량관성모멘트를 나타낸다. u, v, w, p, q, r은 각각 전후동요, 좌우동요, 상하동요 속도, 횡동요, 종동요, 선수동요 각속도를 나타내고, 운동변수들 위의 “ · ”는 시간변화율을 의미한다. 하첨자 0G는 ROV 고정좌표계에서 기술되는 무게중심을 의미한다.
2.2 외력모델링
ROV의 정적, 동적, 형상적 특성 및 환경영향을 고려하여 식 (1)의 우변에 기술된 외력은 식 (2)와 같이 모델링된다.

여기서 하첨자 G, B, H, T, Env는 각각 중력, 부력, 동유체력, 추력 그리고 조류와 같은 환경외력을 의미한다.
2.2.1 중력과 부력
중력(W)과 부력(B)은 항시 지구고정좌표계의 수직방향으로 작용하며 ROV 고정좌표계에 대하여 기술하면 식 (3)과 같다.

2.2.2 동유체력
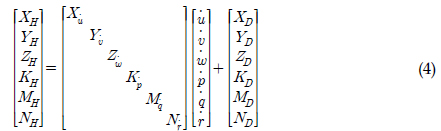
ROV의 동적 특성을 고려하여 동유체력은 식 (4)와 같이 관성력과 항력으로 모델링하였다. ROV의 가속운동과 타 방향의 힘 간 연성이 매우 작다는 가정 하에 부가질량행렬은 식 (4)와 같이 대각요소만을 고려하고 부가질량은 ROV요소를 분할하여 기본형상에 대한 해석값을 적용하여 식 (5)와 같이 차원화된 부가질량 및 부가질량관성모멘트를 도출하였다(Newman, 1977). ROV의 요소분할은 기본형상 Fig. 2와 같이 상부 부력재, 압력용기 그리고 하부의 DVL(Doppler velocity log)로 3개의 요소로 분할하였고, 각 요소에 걸리는 유체력 간의 상호간섭효과는 고려하지 않았다. 상하방향으로 비대칭형상을 고려하여 zo축 방향으로 병진운동 시 발생하는 부가질량력은 식 (5)에 기술된 바와 같이 연직상방과 하방이동시 각기 다른 값(MAUp, MADoun)을 적용하였다.

Description for partition of each component

식 (4) 우변 두 번째 항의 하첨자 𝐷는 감쇠력을 의미하며 항력으로 모델링 된다. 부가질량력과 마찬가지로 항력 또한 단순화된 형상에 대한 항력계수 실험값(Hoerner, 1965)을 이용하였으며, Table 2에 ROV 요소별 축방향 항력계수와 투영면적을 기술하였다. 병진운동에 대한 감쇠력을 식 (6)과 같이 ROV 각 요소에 작용하는 항력을 합하여 모델링하면, 회전운동에 대한 감쇠모멘트는 각 요소의 압력중심과 감쇠력의 벡터곱으로 정의된다. 감쇠력 우변에 정의된 속도벡터는 물체고정좌표계에서 기술된 ROV 각 요소 압력중심점에서의 값이고, 식 (7)로 정의된다.
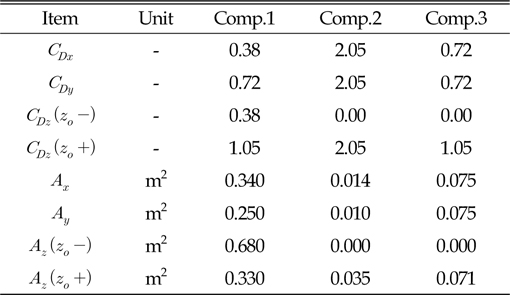
Drag coefficients and projected area of each component
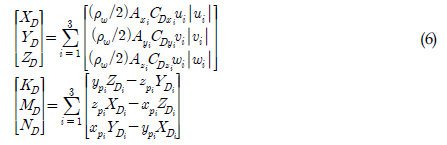

여기서는 CDx, CDy, CDz각각 x0, y0, z0축에 대한 항력계수, Ax, Ay, Az는 각각 x0, y0, z0축에 대한 투영면적, 하첨자 i와 p요소 수와 압력중심을 의미한다.
2.2.3 추력
6개의 추진기가 설치된 각도와 위치를 고려하면 종동요를 제외한 운동에 대한 추력 및 추력모멘트를 할당할 수 있으며 이를 통하여 조종운동을 구현 및 제어할 수 있다. Fig. 3은 임의로 넘버링 된 추진기 배치와 해당추진기의 전방추진 및 후방추진 시 추력-동력곡선을 보여주며, 식 (8)에 각 추진기의 추력 할당에 의해 야기되는 추력 및 추력모멘트 벡터를 정의하였다. 여기서 α는 각 추진기가 설치된 각도를 의미한다.
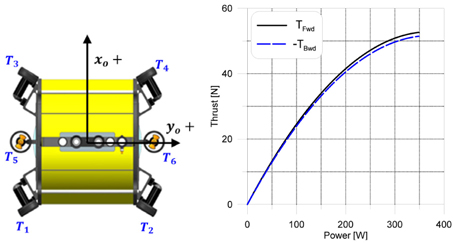
Thruster arrangement and thrust
2.2.4 조류력
수중에서 ROV에 작용하는 환경외력으로 조류력만을 고려하면, 조류력은 조류력계수를 이용하여 항력으로 고려하는 방법과 식 (1)에 기술된 조종운동방정식의 운동변수에 조류속도에 대한 상대속도를 고려하는 방법이 있으며, 본 논문에서는 후자의 방법을 적용하였다. 조류는 지구고정좌표계의 수평방향으로 흐른다고 가정하고 이를 ROV 자세각을 고려한 ROV고정좌표계에서의 조류속도로 변환하여 ROV 속도와의 상대속도를 운동 변수로 적용한다.

여기서  와
와  는 각각 지구고정좌표계와 ROV고정좌표계에서 정의되는 조류 속도벡터이고
는 각각 지구고정좌표계와 ROV고정좌표계에서 정의되는 조류 속도벡터이고  는 지구고정좌표계에서 ROV고정좌표계로의 선형변환행렬이다.
는 지구고정좌표계에서 ROV고정좌표계로의 선형변환행렬이다.
2.2.4 제어력
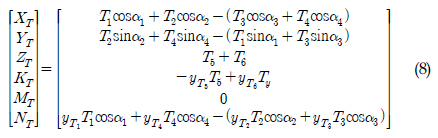
선체검사로봇은 연속에서 선체표면을 트래킹 해야 하므로 정확한 정상상태에 도달할 필요는 없다. 따라서, 선체 트래킹을 위한 추진기 제어기로 비례미분(PD, Proportional-derivative) 제어기를 적용하였으며, 제어력은 트래킹 시 식 (10)과 같이 추진기에 할당된다. 식 (10) 우변에 기술된 하첨자 𝑐는 명령위치이고 선박 오프셋 값으로 정의되어 트래킹 시 계속해서 변하게 된다.
3. 전산유체역학 해석
3.1 지배방정식
요소항력모델을 활용하여 도출된 항력계수는 형상별로 나누어 계산한 값이며, 부재들 간에 작용하는 상호간 간섭효과는 고려하지 않았다. 이러한 간섭효과는 전산유체역학(CFD, Computational fluid dynamics) 해석을 통해서 보다 정확하게 추정할 수 있을 것으로 기대하였다. 항력계산은 상용해석 프로그램 STAR-CCM+를 활용하였으며, 3차원 비압축성 점성유동으로 가정하여 지배방정식은 다음과 같이 연속방정식과 레이놀즈 평균 Navier-Stokes방정식으로 구성된다.


3.1 해석조건 및 결과
ROV의 운용환경을 고려한 속도범위를 선정하여 축 방향으로 0.4m/s, 0.6m/s, 1.0m/s 조건 하에 항력계수를 추정하였다. 난류모델로는 SST k−w를 사용하였다. 대류항은 2차 Upwind방법이 사용되었고, 확산항은 2차 중앙차분법에 의해 이산화되었고, 압력과 속도는 SIMPLE알고리즘에 의해 연성되었다. Fig. 4는 3축 방향 속도에 따른 압력분포를 보여주고 있으며, 요소항력모델로 도출한 항력계수와 전산유체역학해석을 통해 도출한 항력 계수를 Fig. 5에 비교하여 도시하였다.
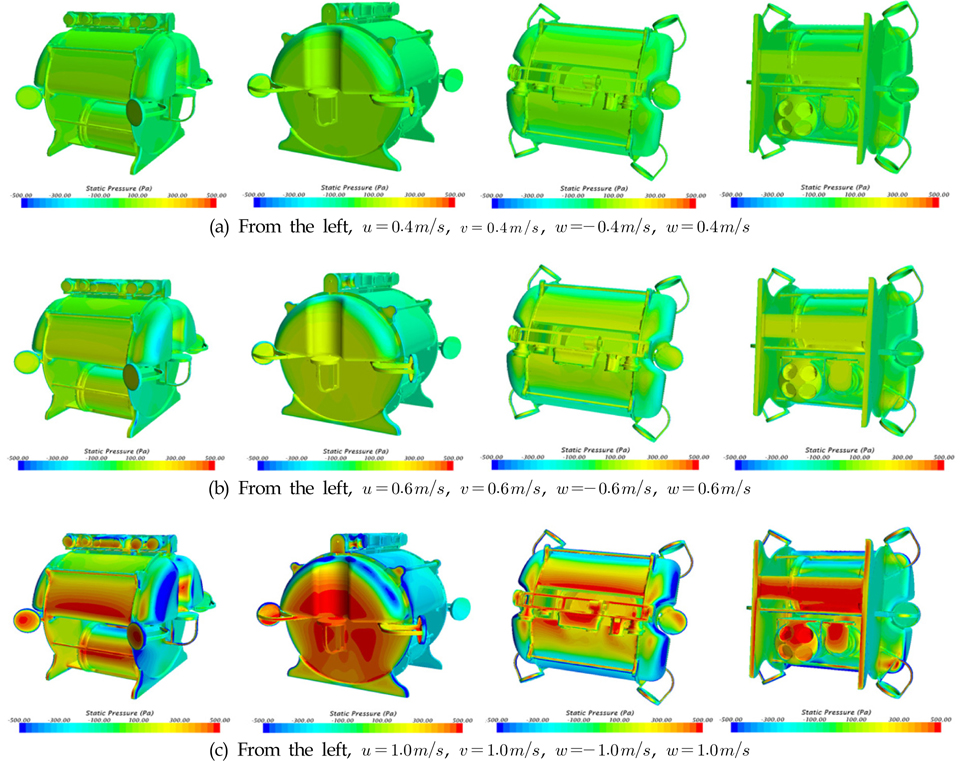
Pressure distributions with respect to axial velocities
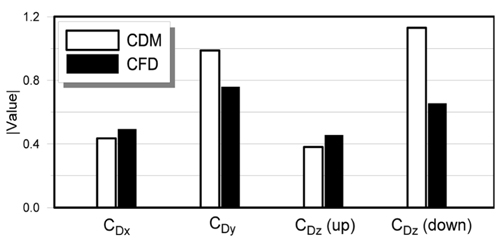
Comprarison of drag coefficients between the results of Component drag model (CDM) and Computational fluid dynamics (CFD)
4. 시뮬레이션
4.1 직진 및 선회
선체 표면을 트래킹하기에 앞서 제어를 하지 않고 순수 추진기의 추력배분에 따른 조종성능을 분석하였다. 상하방향 비대칭형상을 고려하여 직진시 종동요각과 전후동요 속도의 수렴값을 확인하였으며, 선회 시 정상선회 각속도와 조류에 의한 영향을 분석하였다.
Figs. 6-7은 요소항력모델(이하 CDM)과 전산유체역학해석(이하 CFD)을 통해 도출한 모델 파라메터를 활용하여 수행한 조종 시뮬레이션 결과를 도시하였다. ROV고정좌표계를 기준으로 xo축 방향 항력(CDx)의 경우, CFD결과가 CDM보다 크므로 전후 동요 속도의 수렴값이 CFD가 더 작으며, 종동요각의 경우 감쇠모멘트에 영향을 주는 CDx와 zo(up)축 방향 항력(CDz)이 CFD가 크기 때문에 종동요각 수렴값에서 약간의 차이가 발생한다. 종동요각 수렴값은 대략 5° 정도로 종동요를 제어할 수 없는 현 시스템에서 이 값은 중요한 파라메터가 될 수 있다. y0축 방향 항력(CDy)의 경우 CDM이 큰 값을 보이므로 선회시 좌우동요 속도와 선수동요 각속도는 Fig. 7과 같이 CFD가 CDM보다 큰 값을 보이고 있다.

Surge velocity(left) and pitch angle(right) in straight test
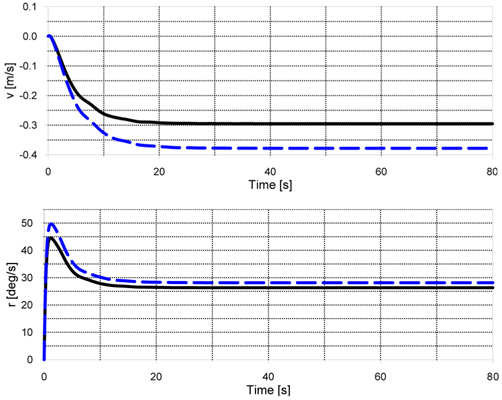
Sway velocity(left) and yaw rate(right) in right turning test
간섭효과가 고려된 CFD와 요소를 단순형상으로 분할하여 고려한 CDM을 비교해 볼 때, 운동변수별로 다소의 차이가 존재하나 전체적으로 유사한 경향을 보여줌을 알 수 있다. Fig. 8은 조류효과를 반영한 선회궤적을 보여주고 있으며 오차가 누적되는 궤적의 경우, 운동변수에 비해서 큰 차이를 보이고 있다.

𝑂―𝑥𝑦 trajectory in right turning test
4.2 트래킹
트래킹 시뮬레이션에는 형상정보를 획득하기 용이한 KVLCC2M(Hino, 2005)을 적용하였으며, 대상 선박의 3개 스테이션에서 30개의 수선에서 폭에 대한 오프셋을 획득하였다. 중앙횡단면 부근을 비롯하여 선수, 선미 부근을 ROV가 선체표면을 검사한다는 가정하에 KVLCC2M 선박의 중앙횡단면 부근(스테이션 8)과 형상변화가 심한 스테이션 2, 스테이션 19.25에서 대해 조류가 없는 조건하에 트래킹 시뮬레이션을 수행하였다. 트래킹은 우현 흘수에서 시작하여 좌현흘수까지 시행하였고 Fig. 9에 그 결과를 도시하였다. 초기 과도구간에서 선체 길이방향으로 트래킹오차가 크게 나타났으나 시간이 지남에 따라 길이방향 트래킹오차는 줄어드는 것을 보였고, 수직운동이 수평면운동에 비해 불안정한 거동을 보이고 있다.
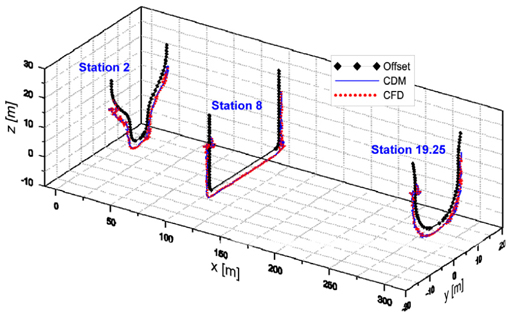
Tracking trajectory
5. 결 론
다수의 추진기로 대앙각 운동을 포함한 다양한 조종운동을 구현하는 ROV에 대한 동역학 수학모형으로 요소항력모델로 정립하였다. 요소항력모델의 유효성 검증을 위하여 간섭효과가 고려된 CFD 해석을 병행하여 항력계수를 추정한 후, 동일한 조건에서 조종 시뮬레이션을 수행하였다. 본 논문의 대상 ROV 임무를 선체검사로 한정하여 KVLCC2M 선체 오프셋을 이용하여 검사표면을 설정하고, ROV 트래킹 PD 제어법칙을 구성하여 조종운동 및 트래킹 성능을 분석하고 비교한 결과, 다음과 같은 결론을 얻을 수 있다.
(1) 모형시험을 수행하기 다소 까다로운 복잡형상 ROV의 설계초기단계에서 조종운동을 해석하고자 할 때 본 논문에서 제시하는 요소항력모델을 활용하여 대략적인 추정이 가능한 것으로 판단된다.
(2) 선체 길이방향으로 형상변화가 심한 스테이션 2, 스테이션 19.25에서 트래킹오차가 크게 나타났지만 대상 ROV는 당초 목적대로 선체표면을 트래킹할 수 있다.
(3) 수직면운동을 제어하는 추진기의 제어이득을 보다 효과적으로 튜닝할 필요가 있다.
Notes
It is noted that this paper is revised edition based on proceedings of KMRTS 2016 in Pukyong National Univ., Buan. 374
Acknowledgements
이 논문은 2015년 해양수산부 재원으로 한국해양과학기술진흥원의 지원을 받아 수행된 연구임(선체 수중검사 자동화를 위한 자율무인시스템 개발).
References
Lee, I.W., Park, H., 2013. Low Frictional Marine Anti-Fouling Paint Toward the Improvement of Ship Energy Efficiency. Korean Industrial Chemistry News, 16(5).
Lee I.W., Park H.. Low Frictional Marine Anti-Fouling Paint Toward the Improvement of Ship Energy Efficiency. Korean Industrial Chemistry News 2013;16(5)Choi, H.S., Kwon, K.Y., Chung, K.R., Seo, J.N., Kang, H.S., 2009. Development of Cleaning Module and Operating System of Underwater Robot for Ship Hul Cleaning. Journal of the Korean Society of Marine Engineering, 42(6), 553-561.
Choi H.S., Kwon K.Y., Chung K.R., Seo J.N., Kang H.S.. Development of Cleaning Module and Operating System of Underwater Robot for Ship Hul Cleaning. Journal of the Korean Society of Marine Engineering 2009;42(6):553–561.Seol D.M., Rhee, K.P., Yeo, D.J., 2005. An Experimental Study of the Submerged Depth Effect on the Manoeuvrability in a Horizontal Plane of an Underwater Vehicle. Journal of the Society of Naval Architects of Korea 42(6), 551-558.
Seol D.M., Rhee K.P., Yeo D.J.. An Experimental Study of the Submerged Depth Effect on the Manoeuvrability in a Horizontal Plane of an Underwater Vehicle. Journal of the Society of Naval Architects of Korea 2005;42(6):551–558. 10.3744/SNAK.2005.42.6.551.Kim, J.Y., 2009. Design and Control of a Hovering Type AUV. Journal of the Korean Society of Precision Engineering, 26(5), 23-32.
Kim J.Y.. Design and Control of a Hovering Type AUV. Journal of the Korean Society of Precision Engineering 2009;26(5):23–32.Prestero, T., 2001. Verification of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicle. MIT master thesis.
Prestero T.. Verification of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicle. MIT master thesis 2001.Gertler, M., Hagen, G.R., 1967. Standard Equation of Motion for Submarine Simulations. NSRDC Report No. 2510.
Gertler M., Hagen G.R.. Standard Equation of Motion for Submarine Simulations 1967.Feldman, J., 1979. DTNSRDC Revised Standard Submarine Equations of Motion. DTNSRDC/SPD-0393-09.
Feldman J.. 1979.Fossen, T.I., 1994. Guidance and Control of Ocean Vehicles. John Wiley & Son.
Fossen T.I.. John Wiley & Son; 1994.Newman, J.N., 1977. Marine Hydrodynamics. The MIT Press, Cambridge, Massachusetts and London, England.
Newman J.N.. Marine Hydrodynamics The MIT Press. Cambridge, Massachusetts and London, England: 1977.Hoerner, S.F., 1965. Fluid Dynamic Drag.
Hoerner S.F.. Fluid Dynamic Drag 1965.Hino, T., 2005. NMRI (National Maritime Research Institute) Report. Proceeding of CFD Workshop Tokyo 2005.
Hino T.. NMRI (National Maritime Research Institute) Report In : Proceeding of CFD Workshop Tokyo 2005.