강결합 방식의 INS/DVL/RPM 복합항법시스템 설계
Design of Tightly Coupled INS/DVL/RPM Integrated Navigation System
Article information

Trans Abstract
Because the global positioning system (GPS) is not available in underwater environments, an inertial navigation system (INS)/doppler velocity log (DVL) integrated navigation system is generally implemented. In general, an INS/DVL integrated system adopts a loosely coupled method. However, in this loosely coupled method, although the measurement equation for the filter design is simple, the velocity of the body frame cannot be accurately measured if even one of the DVL transducer signals is not received. In contrast, even if only one or two velocities are measured by the DVL transducers, the tightly coupled method can utilize them as measurements and suppress the error increase of the INS. In this paper, a filter was designed to regenerate the measurements of failed transducers by taking advantage of the tightly coupled method.
The regenerated measurements were the normal DVL transducer measurements and the estimated velocity in RPM.
In order to effectively estimate the velocity in RPM, a filter was designed considering the effects of the tide. The proposed filter does not switch all of the measurements to RPM if the DVL transducer fails, but only switches information from the failed transducer. In this case, the filter has the advantage of being able to be used as a measurement while continuously estimating the RPM error state. A Monte Carlo simulation was used to determine the performance of the proposed filters, and the scope of the analysis was shown by the standard deviation (1 σ, 68%). Finally, the performance of the proposed filter was verified by comparison with the conventional tightly coupled method.
1. 서 론
관성측정장치(IMU, Inertial measurement unit), 도플러 속도센서(DVL, Doppler velocity log)는 수중 환경에서 복합 항법을 구현하기 위해 사용하는 대표적인 센서이다. IMU는 비력(Specific force)을 측정하는 가속도계와 회전운동을 측정하는 자이로를 이용하여 항체의 가속도 및 각속도를 측정한다. 이를 통해 주위 환경에 영향 받지 않고 자세, 속도, 위치정보를 독립적으로 계산할 수 있다. 하지만 IMU는 적분과정을 통해 항법 결과를 계산하기 때문에 짧은 시간에는 정확하나 시간이 지남에 따라 항법오차가 누적되는 단점이 있다(Titterton and Weston, 1997). 이러한 IMU의 단점을 극복하기 위해 DVL 등 외부센서를 이용하여 항법 결과값을 보정하는 방법이 다양하게 연구되고 있다.
DVL은 도플러 효과를 이용하여 수중운동체의 속도를 측정하는 센서다. 수중운동체가 움직이면서 지면에 음파를 송신하였을 때 해저면으로부터 반사되어 돌아오는 수신신호의 진동수 변화를 관측함으로써 물체의 속도를 측정할 수 있다. DVL은 4개의 트랜스듀서가 JANUS 형상에 따라 배치되어 있으며 각각의 트랜스듀서에서 측정된 속도를 변환좌표계를 이용하여 동체의 3축에 대한 속도로 변환한다(Rudolph and Wilson, 2012).
일반적으로 DVL을 이용한 관성항법장치(INS, Inertial navigation system)의 속도보정 알고리즘은 DVL에서 계산된 동체좌표계의 속도를 칼만필터의 측정치로 이용하는 약결합(Loosely coupled) 방식으로 구성된다. 약결합방식은 강결합방식에 대비하여 상대적으로 많은 연구가 수행되었으며 주로 EKF(Extended Kalman filter)를 기반으로 항법필터를 설계하여 검증한다. 최근에는 UKF(Unscented Kalman filter), CKF(Cubature Kalman filter) 등 다양한 필터를 설계하여 항법성능을 검증하는 연구가 수행되었다. 약결합방식은 필터 설계 시 측정방정식이 간단하다는 장점이 있지만 DVL 트랜스듀서 신호 중 1개의 신호만 수신하지 못해도 동체좌표계의 속도를 정확하게 측정할 수 없다. 이러한 단점을 극복하기 위해 DVL 이외의 다양한 센서를 사용하거나 구속조건을 만들어서 필터를 설계한다(Lee at al,, 2003a; Lee at al., 2003b; Lee at al., 2004; Yoo and Kim, 2014).
최근에 강결합(Tightly coupled) 방식의 항법필터를 설계하는 연구가 이루어 지고 있다. 강결합 방식은 필터의 측정치가 변환된 동체좌표계의 속도가 아니라 각 트랜스듀서에서 측정된 속도를 이용한다. 4개의 트랜스듀서 중 일부가 고장이 나더라도 나머지 트랜스듀서의 속도정보를 통해 관성항법장치의 속도오차를 어느 정도 보상할 수 있다. 약결합 방식에 비해 강인한 성능을 보이지만, DVL 트랜스듀서의 고장 수가 늘어남에 따라 추정하는 속도 오차는 증가하게 된다(Tal et al., 2017; Eliav and Klein, 2018; Liu et al., 2018).
수중환경에서 INS의 속도 오차를 보정할 수 있는 방법으로 RPM(Revolutions per minute) 정보를 이용할 수 있다(Yoo at al., 2013). RPM 정보와 수중운동체의 전진속도 사이의 관계는 1차 선형 방정식으로 추정할 수 있다. 이는 6자유도 모델 또는 시험 결과를 통해서 도출할 수 있으며, 이상적인 상황에서는 정확하게 속도 정보를 추정할 수 있다. 하지만 RPM정보 단독으로는 수중환경의 특성 중 반드시 고려해야 하는 조류에 대한 영향을 보상할 수 없다.
본 논문에서는 기존 강결합 방식의 성능향상을 위해 INS/DVL/RPM 복합항법 필터를 설계한다. 제안된 방식의 개념은 고장난 트랜스듀서의 정보를 추정하여 기존 강결합 방식의 성능을 향상시키는 것이다. 이를 위해 조류에 대한 오차요소를 고려하여 RPM의 속도정보를 추정한다. 그리고 운항 중 DVL이 고장이 나면 필터의 측정치를 RPM 속도정보로 변환한다. 이 때 핵심은 전체 속도에 대한 측정치를 변환하는 것이 아니라 고장난 트랜스듀서의 속도정보만 변환한다. 이는 강결합 방식의 장점을 활용한 것으로 트랜스듀서가 고장나기 전까지 정확히 추정된 RPM값을 사용하고, 또한 정상적인 트랜스듀서의 측정값을 이용해 지속적으로 RPM의 속도 오차정보를 추정할 수 있다. 약결합 방식을 사용했을 경우도 트랜스듀서가 고장나기 전 똑같이 RPM에 대한 오차요소를 추정하는 것은 가능하다. 하지만 고장상황이 발생하면 측정치를 모두 RPM속도정보로 변환해야하며 더 이상 RPM의 오차요소를 추정할 수 없다. 제안된 필터의 성능을 분석하기 위해 몬테카를로 수치해석 기법을 이용하여 시뮬레이션을 수행하였으며 수행결과는 표준편차(Standard deviation, 1 σ)로 분석하였다.
2. 일반적인 INS/DVL 복합항법
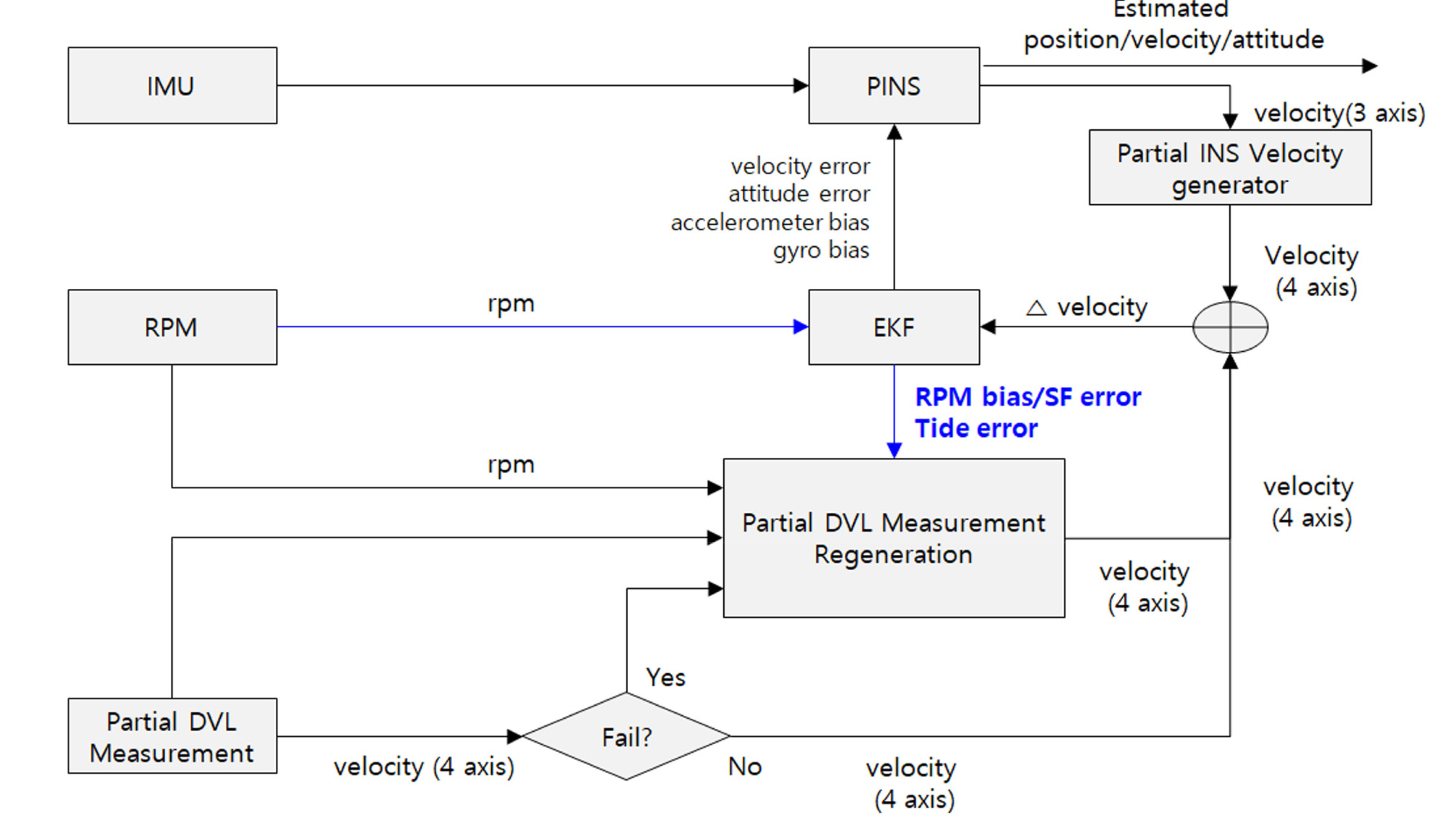
Fig. 1은 일반적인 INS/DVL 복합항법에 대한 구조를 나타낸다. Fig. 1의 왼쪽은 약결합방식, 오른쪽은 강결합방식이다. 두 방식은 측정치 모델에서 차이점을 나타내며, 약결합 방식은 동체좌표계의 3축 속도오차, 강결합 방식은 DVL 좌표계의 4축 속도오차 정보이다.

General Loosely/Tightly Coupled INS/DVL Structure
2.1 약결합 방식 측정치 모델
약결합 방식의 측정치 모델은 항법좌표계의 3축에 대한 속도 오차정보이다. 속도오차정보는 INS에서 계산된 속도에서 DVL에서 측정된 속도의 차이이며 이는 다음과 같이 나타낼 수 있다(Lee at al,, 2003a).
여기서
식 (1)의 오차모델을 유도하기 위해 섭동법(Perturbation method)를 사용하여 식 (2)를 유도한다.
여기서 δϕ는 자세오차 정보이다. 따라서 측정행렬 H는 다음과 같이 설계할 수 있다.
2.2 강결합 방식 측정치 모델
강결합 방식의 측정치 모델은 DVL 좌표계의 4축에 대한 속도 오차정보이다. 항체좌표계와 DVL 좌표계의 변환행렬은 관계는 식 (4)과 같다(Rudolph and Wilson, 2012).
여기서
여기서 α는 지면으로부터 DVL트랜스듀서 4개의 방향이 이루는 각도, γ는 항체의 전진방향으로부터 트랜스듀서가 이루는 각도를 의미한다. 항체의 전진방향으로부터 (+) 형태로 DVL을 배치하게 되면 γ = 0°, (×) 형태로 DVL을 배치하게 되면 γ = 45°이다.
측정치 모델은 현재 INS에서 계산된 속도에서 DVL의 속도의 차이이며 이는 다음과 같이 나타낼 수 있다.
식 (6)의 오차모델을 유도하기 위해 섭동법을 사용하여 식 (7)을 유도한다.
따라서 측정행렬 H는 다음과 같이 설계할 수 있다.
3. 강결합 기반 INS/DVL/RPM 복합항법 필터 설계
2장에서 기술한 약결합, 강결합 방식의 차이는 DVL 트랜스듀서의 고장 유무이다. 약결합 방식은 4개의 트랜스듀서 중 1개라도 고장나면 사용할 수 없지만 강결합 방식은 정상적인 트랜스듀서의 정보만으로 속도오차 추정이 가능하다. 강결합 방식은 약결합 방식에 비해 뛰어난 성능을 보이는 것은 사실이지만 근본적으로 고장상황 이전보다 속도오차 추정능력은 떨어질 수 밖에 없다.
본 논문에서는 기존 강결합 방식의 성능향상을 위해 INS/DVL/RPM 복합항법 필터를 제안한다(Fig. 2). RPM정보는 수중 운동체의 전동기 정보로부터 획득하여 동체좌표계 상의 전진속도를 추정하는 방식이다. 이상적인 상황에서 RPM 을 이용한 속도추정은 상당히 정확하며, 이는 수식 (9)로 나타낼 수 있다.
Proposed method : Tightly coupled INS/DVL/RPM structure
식 (9)의 오차 모델을 유도하면 다음과 같다.
RPM으로 추정한 전진방향 속도 오차
위에서 δb, rpm는 RPM 바이어스 오차, δsf, rpm는 RPM 환산계수 오차,
여기서 F11, F21, F22는 Titterton and Weston(1997)을 참조한다.
먼저 조류를 고려하지 않은 측정치 모델은 다음과 같다.
식 (13)의 오차모델을 유도하기 위해 섭동법을 사용하여 식 (14)을 유도한다.
조류의 영향이 없다면 식 (14)의 모델을 이용하여 RPM으로부터 전진속도를 정확하게 추정할 수 있다. 만일 DVL의 트랜스듀서가 고장이 난다면 DVL을 대신하여 정확하게 속도정보를 추정할 수 있다. 하지만 조류가 존재하면 식 (14)를 통한 속도오차추정은 조류의 영향에 의해 부정확하다. 이에 RPM을 통한 속도추정을 할 때 조류에 대한 보상은 필수적이며, 이에 대한 측정치 모델은 다음과 같다.
식 (15)의 오차모델을 유도하기 위해 섭동법을 사용하여 식 (16)을 유도한다.
따라서 측정행렬 H는 다음과 같이 설계할 수 있다.
최종적으로 RPM 바이어스 및 환산계수오차, 조류에 대한 영향을 고려한 추정 속도는 식 (18)과 같이 나타난다.
여기서 추정한 RPM의 동체좌표계 속도를 DVL좌표계로 변환하게 되면 식 (19)와 같다.
조류를 고려한 RPM의 속도를 실시간으로 추정하다가 만일 DVL이 고장이 나게 되다면 최종적으로 식 (20)을 통해 보상을 수행한다. 예를 들어 DVL 2,3번 트랜스듀서가 고장이 나면 1,4번 트랜스듀서의 정보는 RPM 속도, 나머지 2,3번은 dvl 트랜스듀서의 속도를 사용한다.
제안된 필터의 장점은 다음과 같다. 만일 DVL이 고장났을 때 RPM의 정보만 측정치로 사용하게 되면 RPM의 오차정보를 더 이상 추정할 수 없다. 또한 이럴 경우 약결합 방식과 다른 점이 없다. 하지만 강결합 방식의 장점을 활용하여 고장나지 않은 DVL 정보와 RPM정보를 융합하는 것이 제안된 필터의 핵심이다. 식 (20)의 구조를 그림으로 표현하게 되면 Fig. 3과 같다.
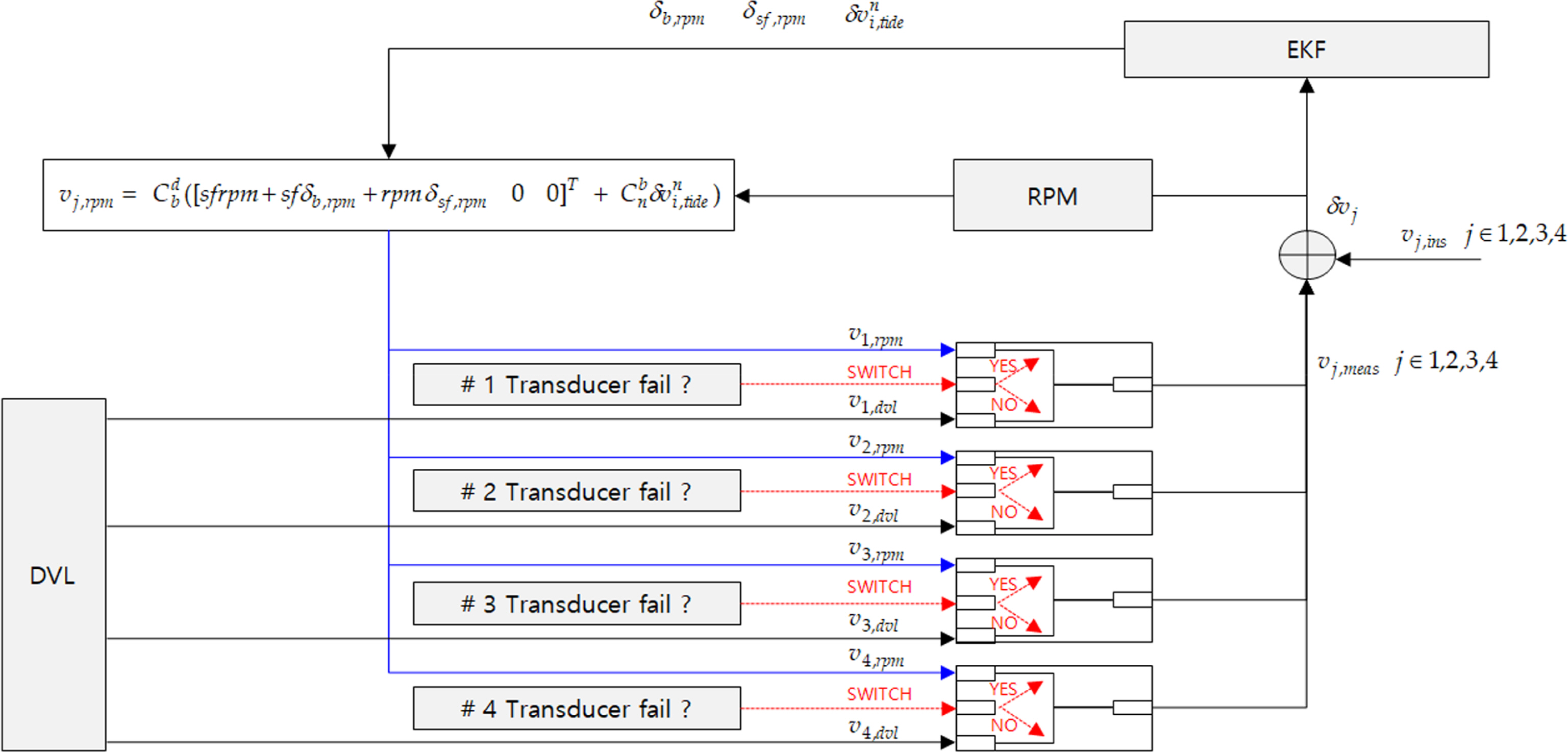
Partial DVL measurement regeneration structure
4. 수치 시뮬레이션
4.1 시뮬레이션 개요
제안된 필터의 성능을 분석하기 위해 몬테카를로 수치해석 기법을 이용하여 시뮬레이션을 수행하였다. 분석 범위는 조류의 유무, DVL 트랜스듀서가 2, 3개 고장이 났을 경우에 대해 기존 강결합 방식(2.2절)과의 비교 분석하였다. 분석의 목적은 조류의 유무에 따라 제안된 필터와 기존 강결합 필터의 성능 차이를 확인하는 것이다. 각 경우의 수마다 100회 반복 시뮬레이션을 수행하였으며, 결과는 CEP(Circular error probabiltity), 1 σ 로 분석하였다. CEP는 전체 샘플의 50%, 1 σ 는 68%를 차지한다. 분석을 위해 시뮬레이션 궤적을 생성하였으며 이는 Fig. 4와 같다. 총 운항시간은 27분, 순항속도는 12m/s 이다. 시나리오는 운항을 시작하고 5분 후 부터DVL 트랜스듀서가 고장이 났다고 설정하였다. 고장난 트랜스듀서는 2개일 경우 1, 2번, 3개일 경우 1, 2, 3번이다.
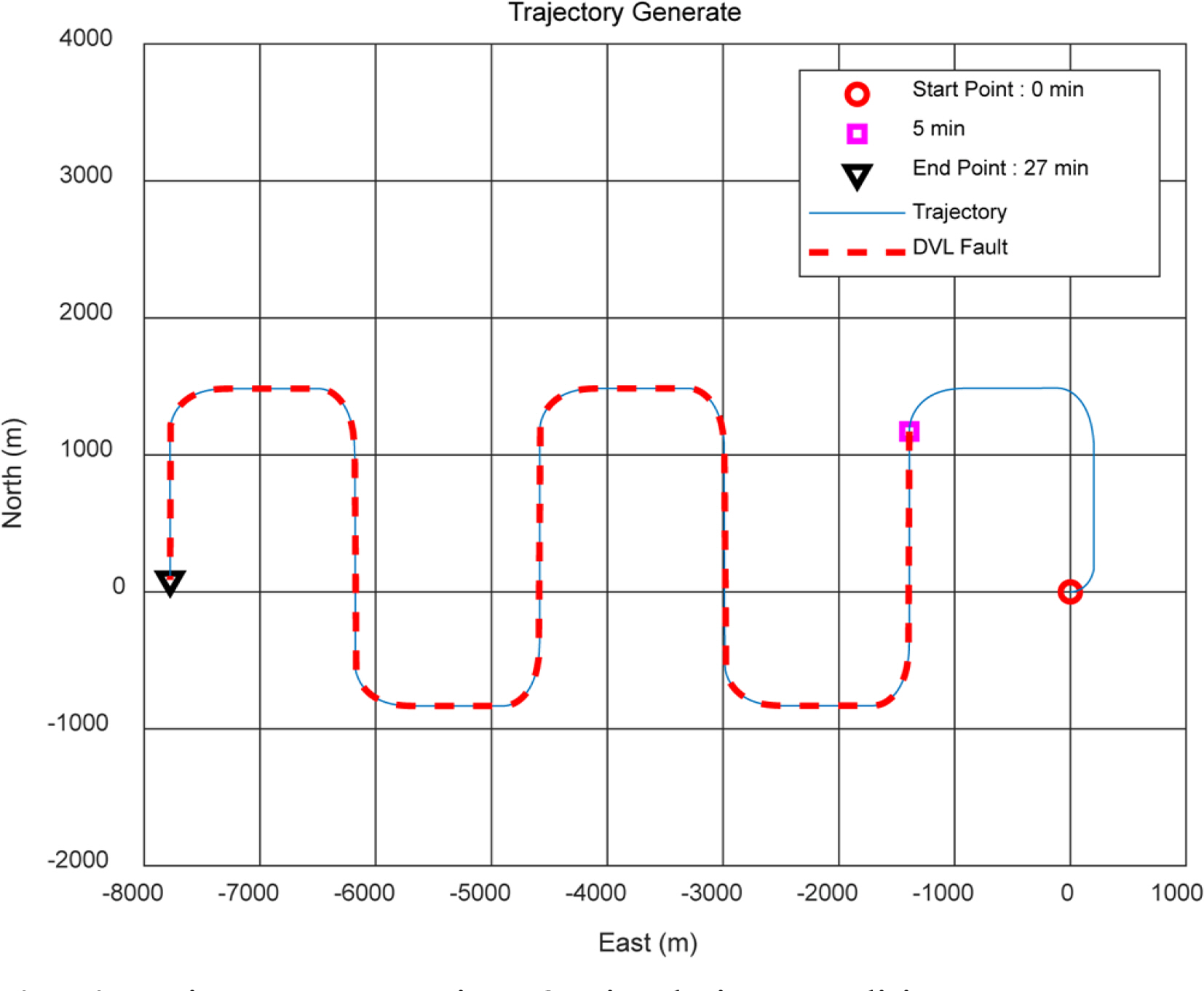
Trajectory generation & simulation condition
생성된 궤적을 바탕으로 역 관성항법을 수행하여 IMU를 모델링 하였다. IMU 모델링 시 바이어스, 환산계수 오차, 측틀림, 잡음 등을 고려하여 신호를 생성하였으며, 이 때 잡음은 1차 마코프 프로세스(1st order Markiv Process)로 모델링 하였다. DVL의 경우 환산계수오차, 바이어스, 잡음을 고려하며 DVL 좌표계에서의 신호를 생성하였다. 식 (21)-(22)는 각각 자이로와 가속도계에 대한 모델링, 식 (23)은 DVL에 대한 모델링 결과다.
위에서 MDCM는 축틀림 오차, sf는 환산계수 오차, dt는 계산 주기, bk, repeatability는 바이어스 반복도, bk, stability는 바이어스 안정도, β는 마코프 프로세스의 시정수이다. 본 논문에서는 DVL 트랜스듀서의 배치가 전진방향 대비 (+) 방향으로 배치되어있다고 가정하였기 때문에

Tide generation at navigation frame

Simulation condition
4.2 성능분석
4.2.1 조류가 존재하지 않는 경우
먼저 트랜스듀서 2개가 고장난 상황에 대한 분석 결과이다. 속도 및 위치 오차에 대한 분석결과는 Fig. 6에 나타나 있다. Fig. 6의 왼쪽 그래프는 파란선은 기존 강결합 방식, 빨간선은 제안된 강결합 방식의 1 σ 값이다. 300초 이후 트랜스듀서가 고장이 났을 때 제안된 방식이 기존 강결합 방식에 비해 속도오차를 잘 추정하는 것을 확인할 수 있다. 이는 RPM의 오차요소를 잘 추정하여 보상한 결과이다. 물론 기존 강결합 방식도 트랜스듀서가 2개 고장난 상황이지만 어느정도 속도 오차를 추정하는 것을 확인할 수 있다. Fig. 6의 중간 그래프는 속도오차에 대한 분포도를 나타내며, 오른쪽 그래프는 위치오차에 대한 분포도이다. Fig. 7은 트랜스듀서가 3개 고장난 상황에 대한 분석 결과이다. 트랜스듀서의 고장갯수가 늘어남에 따라 기존 강결합 방식의 속도오차 추정능력이 떨어진 것을 확인할 수 있다. 하지만 제안된 방식은 트랜스듀서의 고장 개수에 상관없이 유사하게 속도오차를 추정하고 있다. 이에 따라 위치오차 분포도 역시 유사한 결과를 보인다. 현재는 조류가 존재하지 않아 RPM을 통한 속도 추정은 이상적인 값에 가깝지만 제안된 방식이 기존 강결합 방식에 비해 강인함을 확인할 수 있었다.
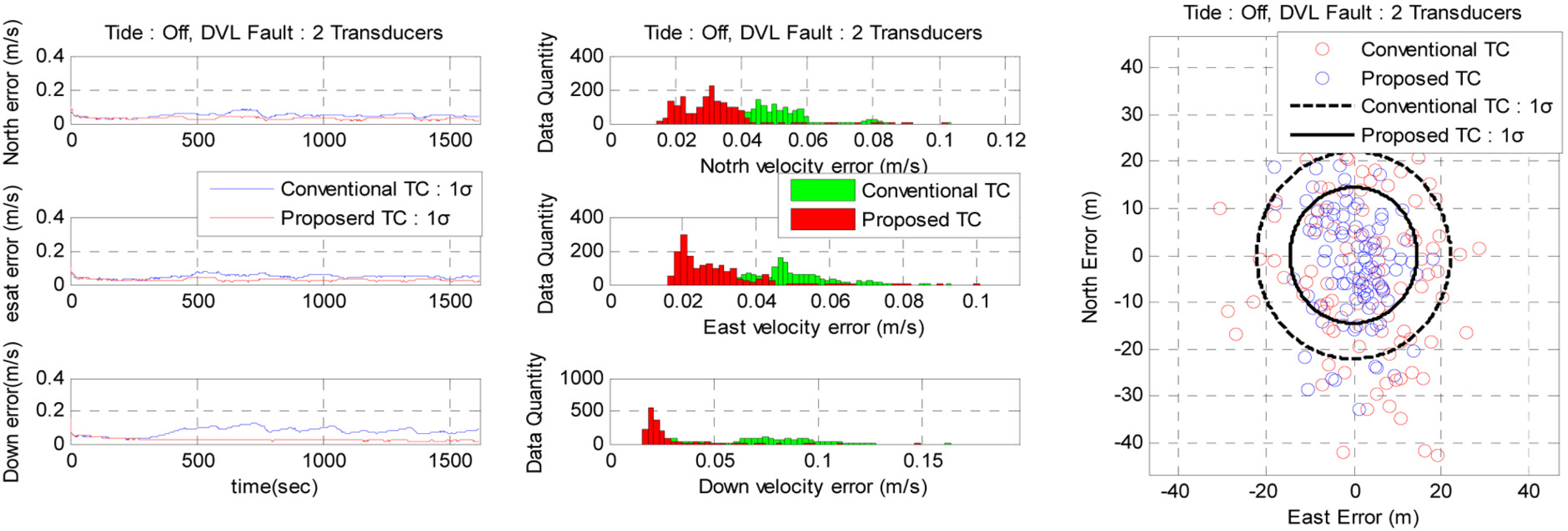
Monte carlo simulation result (Tide : off, DVL fault : 2 transducers)
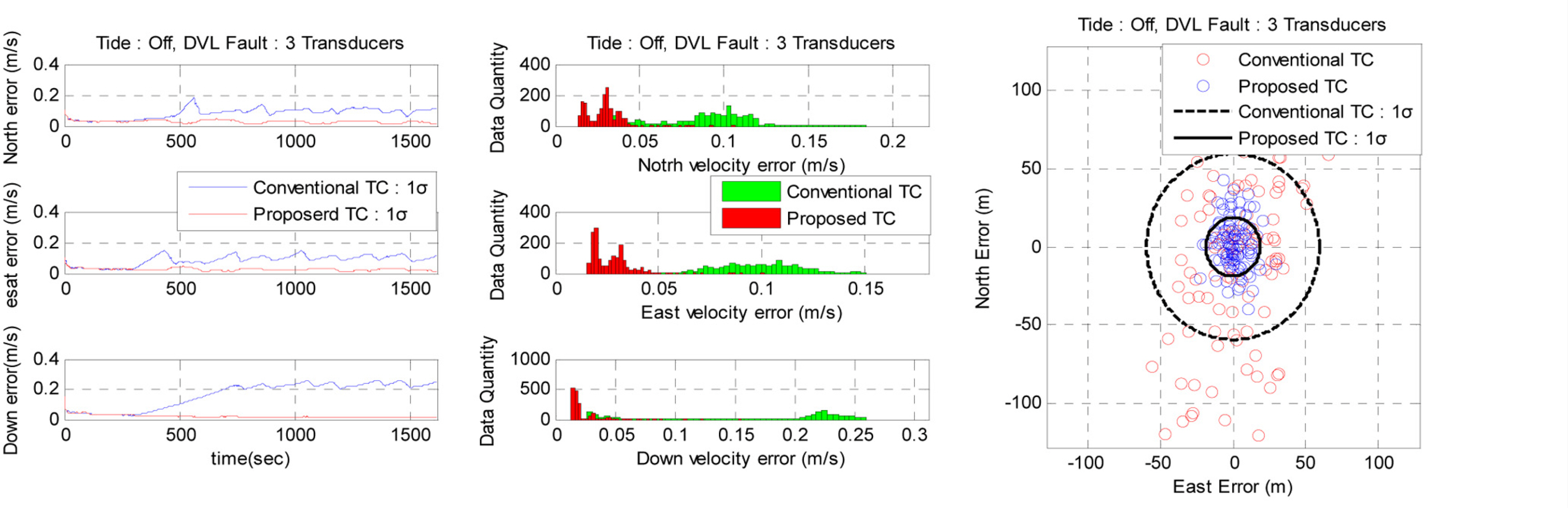
Monte carlo simulation result (Tide : off, DVL fault : 3 transducers)
4.2.2 조류가 존재하는 경우
조류가 존재하는 경우 제안된 필터의 강점을 명확하게 확인할 수 있다. 조류에 대한 오차 모델은 항법좌표계 기준으로 모델링되었기 떄문에 Yaw의 변화에 따라 추정속도가 좌우된다. 조류 오차요소를 빨리 추정하기 위해 출발 후 바로 90도 턴 하도록 궤적을 생성한 것을 Fig. 4를 통해 확인 할 수 있다. 제안된 필터가 조류에 대한 오차를 추정한 결과는 Fig. 8에 나타나있다. 시간이 지남에 따라 조류에 대한 오차가 0근처로 수렴하는 것을 확인할 수 있다. 이렇게 추정된 조류오차를 이용하여 식 (25)를 통해 RPM속도오차를 보상할 할 수 있다. 먼저 트랜스듀서 2개가 고장난 상황에 대한 분석 결과이다. 속도 및 위치 오차에 대한 분석결과는 Fig. 9에 나타나 있다. 조류가 존재하더라도 제안된 방식이 기존 강결합 방식에 비해 속도오차를 잘 추정하는 것을 확인할 수 있다. 트랜스듀서가 3개 고장난 경우로 마찬가지며 이는 Fig. 10에 나타나 있다. 제안된 필터는 트랜스듀서의 고장 개수에 상관없이 유사하게 속도오차를 추정하지만 기존 강결합 방식은 오차가 증가하는 것을 확인할 수 있다.
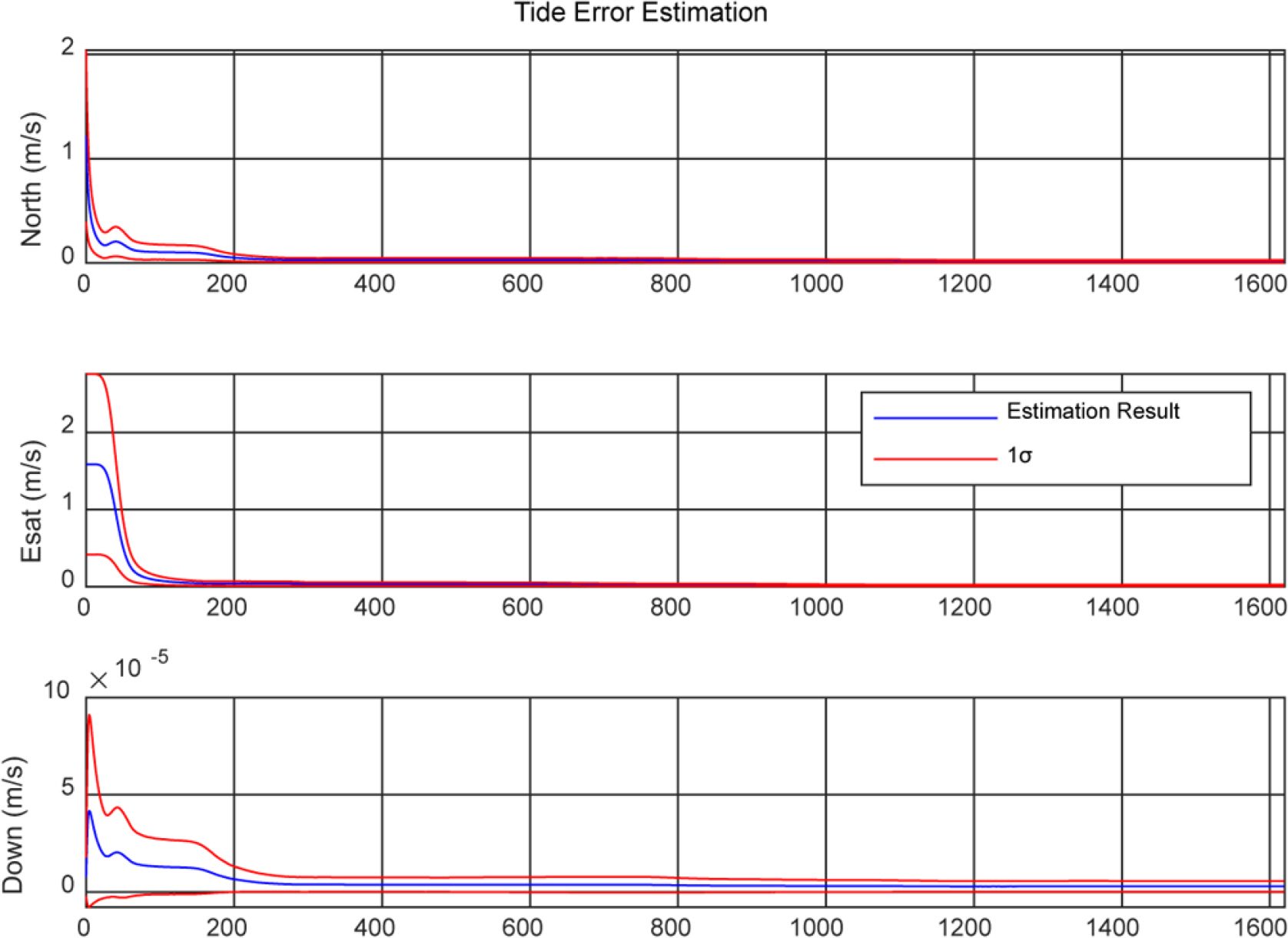
Tide error estimation result
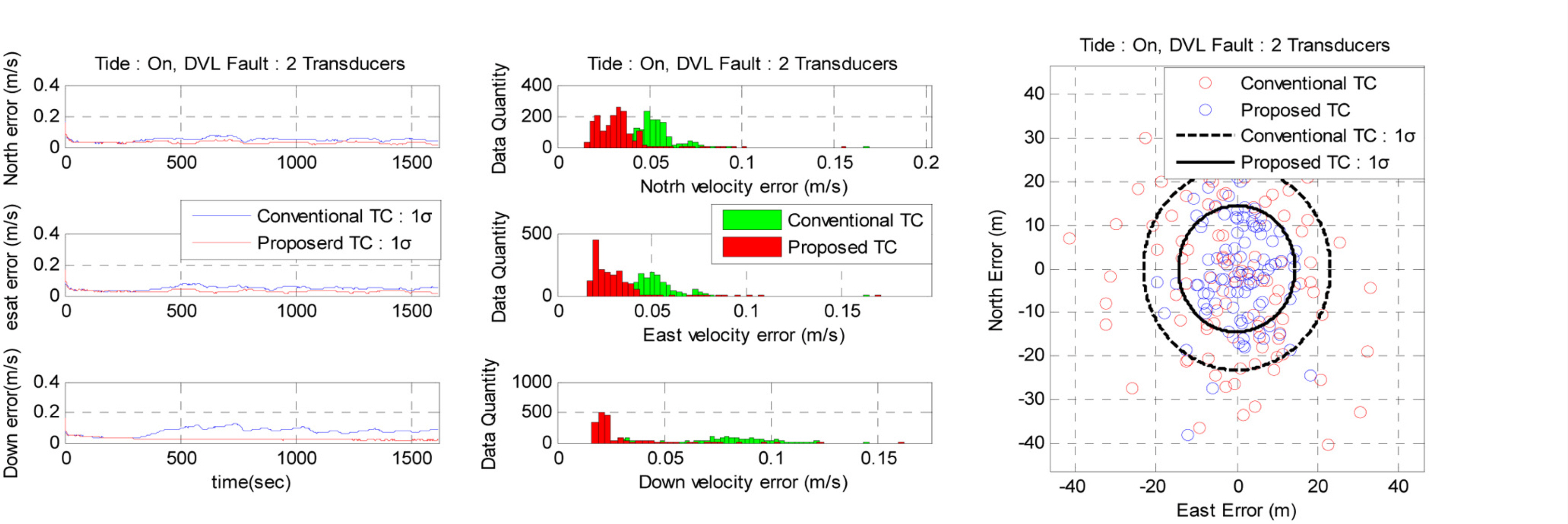
Monte carlo simulation result (Tide : on, DVL rault : 2 transducers)
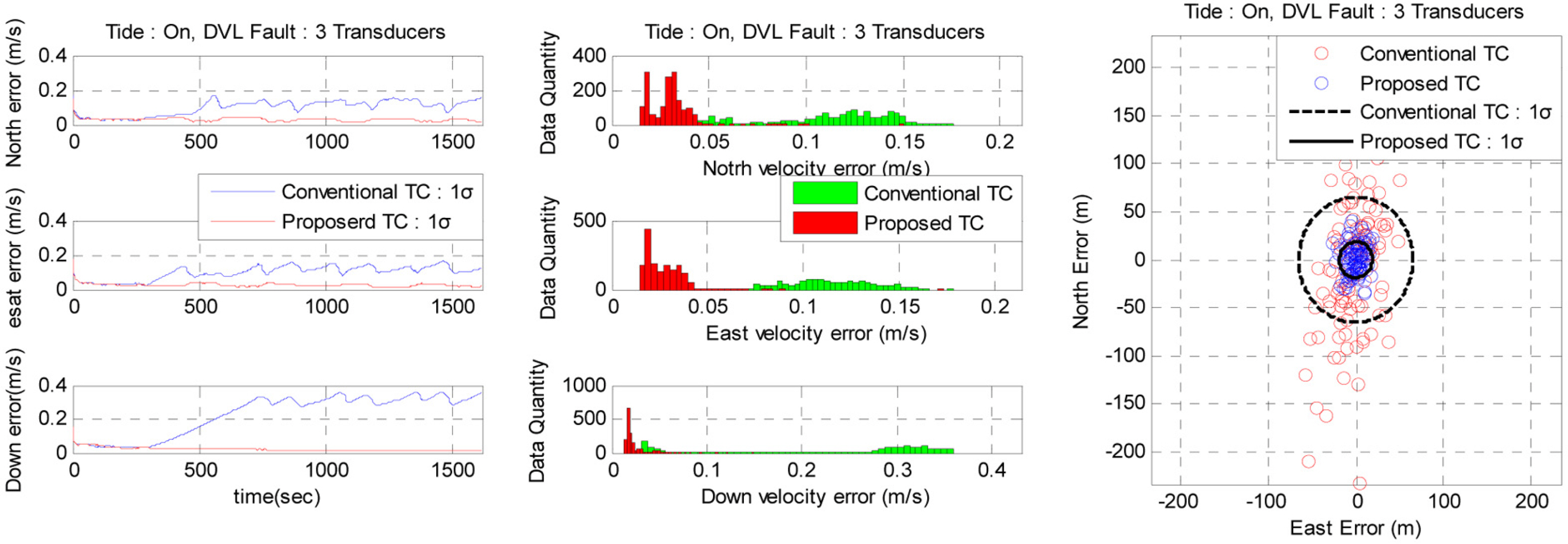
Monte carlo simulation result (Tide : on, DVL fault : 3 transducers)
4.2.3 종합분석
Fig. 11은 최종적인 위치오차분산 결과를 나타낸다. 총 4가지 케이스에 대한 기존/제안하는 강결합 방식의 위치오차를 비교해 보았다. 기존 강결합 방식의 경우 트랜스듀서의 고장 개수에 따라 위치오차가 증가한다. 하지만 제안된 필터는 고장 개수에 상관없이 일관성 있게 위치오차를 추정하는 것을 확인할 수 있다. 조류가 없을 경우는 RPM의 속도가 이상적인 상황에 가깝기 때문에 일관성 있게 추정가능하다. 하지만 조류가 있을 경우 제안된 방식의 성능은 더 명확히 나타난다. 조류가 있는 경우는 어떤 방향, 크기로 조류가 존재하는지 모르기 때문에 조류오차를 잘 추정하지 못하면 일관성 있게 위치오차를 추정할 수 없다. 이에 제안된 필터는 조류에 대한 오차요소를 잘 추정하는 것을 확인할 수 있다. 각 상황별 최종 위치오차를 정리한 것은 Table 2에 나타나 있다. 또한 트랜스듀서의 고장에 따른 각 축별 최종 속도오차 추정 결과는 Table 3에 나타나 있다.
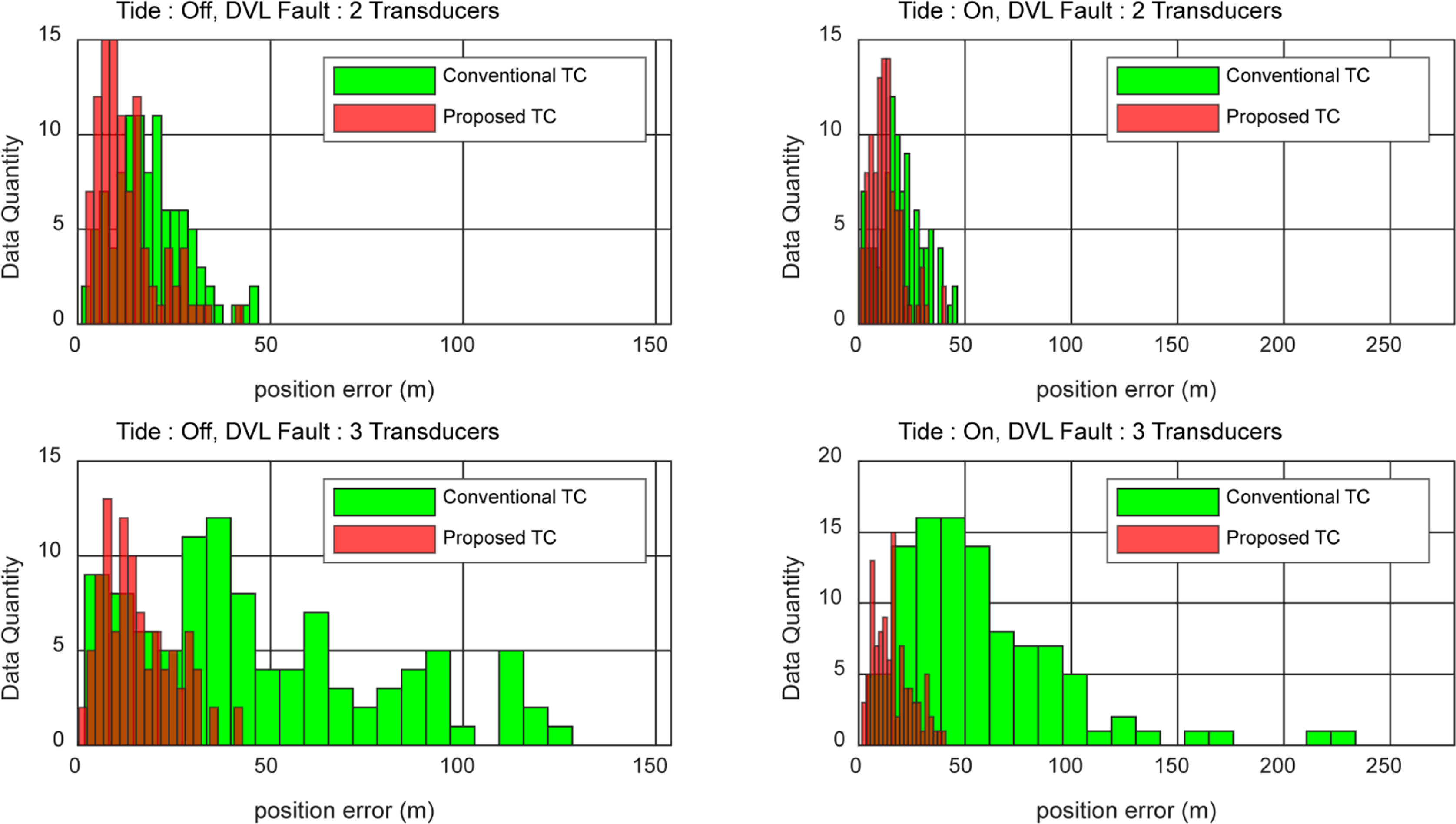
Monte carlo simulation result – position error comparison
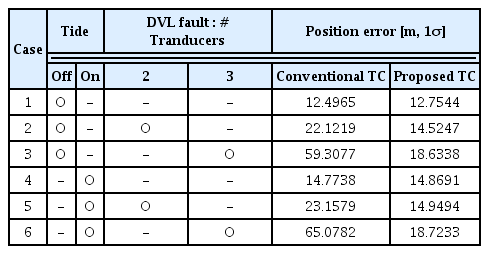
Position error estimate result
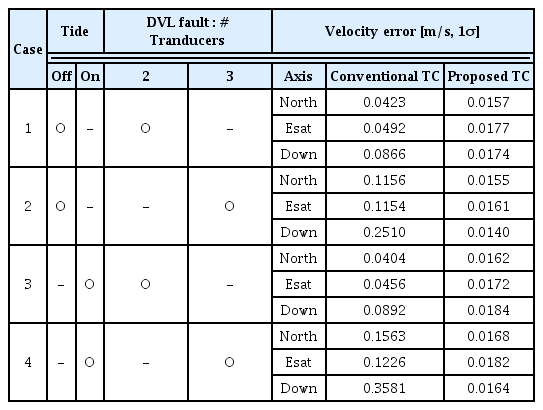
Velocity Error estimate result
5. 결 론
본 논문에서는 강결합 방식의 INS/DVL/RPM 복합항법시스템 설계에 대해 기술하였다. 기존 강결합 방식의 장점을 이용하여 고장난 트랜스듀서의 측정치를 재생성하는 필터를 설계하였다. 재생성되는 측정치는 정상적인 DVL 트랜스듀서 측정값과 추정된 RPM의 속도값이다. 이 때 RPM의 속도를 잘 추정하기 위하여 조류에 대한 영향을 고려하여 필터를 설계하였다. 제안된 필터는 DVL 트랜스듀서가 고장이 나면 모든 측정치를 RPM으로 전환하는 것이 아니라 고장난 트랜스듀서의 정보만 전환하는 방식이다. 이 경우 필터는 지속적으로 RPM의 오차요소를 추정하면서 측정치로 사용할 수 있는 장점이 있다. 제안된 필터의 성능을 확인하기 위해 몬테카를로 시뮬레이션 수치기법을 사용하였다. 분석 결과 제안된 필터는 조류와 트랜스듀서 고장유무에 상관없이 기존의 강결합 방식보다 속도 및 위치오차를 잘 추정하는 것을 확인할 수 있었다.
제안된 강결합 방식의 최종적인 성능평가는 해상시험을 통해 수행되어야 할 것이다. 해상시험을 통한 데이터를 획득하여 고장상황을 모의하고 성능검증 수행하게 되면 제안된 필터의 실효성을 보다 명확하게 확인할 수 있을 것이다.