능동형 횡동요 저감 장치를 이용한 선박운동제어 시뮬레이션
Simulation of Vessel Motion Control by Anti-Rolling Tank
Article information

Trans Abstract
The effects of an anti-rolling tank (ART) on vessel motions were numerically investigated. The potential-based BEM vessel motion simulation program and particle-based computational fluid dynamics program were dynamically coupled and used to perform a simulation of vessel motions with ART. From the time domain simulation results, the response amplitude operators for sway and roll motions were obtained and compared with the corresponding experimental and numerical results. Because the main purpose of ART was only to reduce roll motions, it was important to show that the natural properties of a floating vessel were not changed by the effects of ART. Various ART filling ratios and several ART positions were considered. In conclusion, ART only reduced the roll motion regardless of its filling ratio and position.
1. 서 론
지난 수십 년 동안 다양한 화물의 적재 용량을 증가시키기 위해 선박의 크기는 지속적으로 증가해 왔다. 특히 적재 화물이 유체인 경우 선박의 고유주기가 바뀌거나 복수개의 고유주기를 가지기도 한다(Lee and Kim, 2010; Kim et al. 2011). 이로 인해 부유체 설계 시 환경조건에 대한 영향을 재평가해야 한다. 따라서 이러한 문제를 해결하기 위해 부유체의 고유 특성은 변화시키지 않으면서 가장 취약한 횡동요 운동을 적절히 제어할 수 있는 방안들이 제안되어 왔다.
빌지킬은 저(선저)에 기다란 판 형태의 부가구조물로 형상 저항과 점성 저항을 증가시켜 선박의 횡동요를 저감하는 대표적인 방법이다. U-tube 또는 Horizon-tube는 화물창 주변 혹은 Deck(갑판) 상부에 액체가 저장된 Tube를 탑재하여 선박의 횡동요를 저감하는 Passive anti-rolling tank(PART)로서 Tube 내부유동의 주기는 선박의 횡동요 주가와 Anti-phase이어야 한다. 이러한 다양한 횡동요 저감 방식들 중 최근 능동형 횡동요 저감장치(Active anti-rolling tank, AART)가 제안되고 있다. Marzouk and Nayfeh(2009)에서 제안한 AART는 기존의 U-tube 형태에서 중앙에 펌프를 이용하여 내부 유동을 능동적으로 관리하여 내부 유동으로 인해 복원력을 증가시킬 수 있도록 고안된 장치이다. 이러한 AART는 기존의 수동(Passive) 형태의 ART에 비해 다양한 방향에서 입사되는 파에 대해 대처할 수 있다는 장점이 있으나 탑재비용 및 유지관리 비용이 높다는 단점이 있다.
Cho et al.(2017)은 탱크 내부에 공극이 있는 격벽을 설치하여 슬로싱 저감에 미치는 영향을 정량적으로 평가하였다. Cho et al.(2017)에 의하면 격벽에 의한 탱크 내부 유동의 변화는 슬로싱 효과 및 위상의 변화가 발생할 수 있음을 알 수 있다. Kim et al.(2016)에서는 ART를 탑재한 선박의 운동에 대해 해석하였으며, 이는 선박에 장착된 ART에 의해 선박의 운동 특성이 변화함을 알 수 있다. Kim et al.(2018)에서는 실험적 방법을 통해 격벽을 이용한 슬로싱 저감 장치의 효과에 대한 연구를 수행하였다. 선행연구를 통해 ART의 정량적 평가를 통한 적합한 형태의 ART 탑재는 매우 중요하며, 이를 위해서는 내부유동해석과 내부유동을 고려한 선박 운동에 대한 연구가 필요하다.
본 연구에서는 ART 내부 유동을 시뮬레이션하기 위해 입자법을 사용하였다. 대표적인 입자법으로는 SPH(Smoothed particle hydrodynamic)(Monaghan, 1994)와 MPS(Moving particle semi-implicit) (Koshizuka and Oka, 1996)법이 있으며, iSPH(Incompressible SPH) (Xu et al., 2009)법이 MPS법과 같은 방식의 압력 해법을 사용하면서 두 방법의 차이가 많이 줄어들었다. 본 연구에서는 압력 진동제어 능력이 더 우수하다고 판단되는 MPS법을 사용하였다. MPS법은 Koshizuka and Oka(1996)가 처음 제안되었으며, 이 후 Tanaka and Masunaga(2010)가 포아송방정식의 소스항을 입자 속도의 발산으로 정의하면서 압력의 안정화를 시도하였다. 이 방식은 Lee et al.(2011)이 완화계수의 물리적 접근을 통해 더욱 안정화되었다. 또한 Nomura et al.(2001)에서는 표면장력을 고려한 방식을 제안하였으며, 이는 Kim et al.(2014a)에서 법선 벡터의 정확도를 높이는 연구를 수행하였다.
선체 운동 해석에 관한 연구는 Yang and Kim(2011)이 Boundary element method(BEM)법을 사용하여 허리케인과 같은 극한 환경에서의 Tension leg platform(TLP)의 거동에 관한 연구를 수행하였으며, Lee et al.(2010)은 이를 확장하여 내부 유동에 따른 부유체의 운동 모사에 관한 연구를 수행하였다. Kim et al.(2014)은 Lee and Kim(2010)과 동일한 문제에 대해 내부 유동을 입자법으로 해석하는 방식에 대한 연구를 수행하였다.
본 연구에서는 Kim et al.(2011)이 수행한 연구를 기초로 하여 ART의 유무가 부유체 운동에 미치는 영향뿐만 아니라 ART의 설치 위치 및 탱크 내부 적재율에 따른 영향을 평가하였다.
2. 수치해석기법
2.1 부유체 운동 시뮬레이션
부유체 운동의 시간영역 시뮬레이션을 위해 패널을 이용한 3차원 산란 및 방사 프로그램으로부터 유체력 계수를 확보하여야 한다. 유체력 계수 확보를 위한 시뮬레이션 기법의 자세한 내용은 Lee(1991)에서 찾을 수 있다. 패널기반 3차원 산란 및 방사 프로그램으로부터 구해진 유체력 계수는 주파수영역에서의 값을 가지므로 이를 식 (1)에 나타난 Volterra expansion을 포함한 중첩 적분 기법을 이용하여 변환하여 시간영역 시뮬레이션 프로그램에 입력값으로 사용하도록 한다.
여기서 Ma(∞)은 무한대 주파수에서의 부가질량, FR은 방사에 의한 외력, ζ는 부유체의 변위, ·ζ는 시간 미분, t는 시간, τ는 참조 시간, R(t)는 시간 t에서의 지연 함수이며, 중첩 적분에서 구할 수 있는 값은 입사파로부터 부유체에 작용하는 파력이다. 앞서 언급한 바와 같이 부가 질량을 포함한 유체력 계수는 먼저 주파수영역에서 구해진다. 따라서 식 (1)에서의 무한대 주파수에서의 부가질량을 구하기 위해서 다음의 식을 이용한다.
여기서 지연함수 R(t)는 시간 기억 효과를 위해 사용되었다. 이 지연함수는 다음의 식으로 표현할 수 있다.
여기서 C(ω)는 방사 감쇠 계수이다. 부유체 운동 계산에서 내부 유체 저장소의 충격력 및 관성력을 고려하기 위해서는 운동방정식에 유체력을 고려하는 것이 일반적이다.
여기서M은 부유체의 질량, K는 외부강성계수, F(t)는 외력이며 외력은 파력과 부유체의 점성 감쇠력을 고려한 Fext(t)와 내부 유체력을 고려한 Fsloshing(t)로 구성된다.
2.2 Moving Particle Semi-implicit 법
ART의 내부에 작용하는 유체력을 계산하기 본 연구에서 사용된 방법은 MPS이다. MPS법의 지배방정식은 연속방정식과 Navier-stokes 방정식으로 아래 식과 같다.
여기서 ρ는 유체의 밀도, μ는 압력, μ는 점성계수,
여기서 Laplacian 모델에 사용된 λ는 분산이 해석해와 동일하도록 도입된 계수이다.
MPS법은 연속유체를 이산화된 입자로 모사하고 입자 하나하나가 물리량을 가지고 이동하기 때문에 연속체 가정을 만족시키지 못할 가능성이 있다. 따라서 이를 극복하기 위한 방법으로 가중치 함수를 도입하였다. 가중치 함수는 식 (7)에 있는 입자 상호작용 모델의 기초가 된다. 가중치 함수는 주변입자가 중심입자에 미치는 영향을 정량화 한 것으로 거리에 대한 함수이다 본 연구에 사용된 가중치 함수는 다음과 같다.
여기서 rij는 (rj-ri)이며,ri는 i번째 입자의 위치벡터이다. re는 입자간 상호작용의 유효반경으로 본 연구에서는 2.1×lo를 사용하였다. 여기에서 lo는 초기 입자 배치 상태에서 입자가 평균 거리이다. 식 (8)에서 보이는 것과 같이 만일 입자간 거리가 유효반경 re보다 클 경우 입자간 상호작용의 크기는 0이다. 본 연구에서는 Lee et al.(2011)(PNU-MPS)에서 제시한 가변 시간간격을 사용하여 입자가 벽면을 통과하는 문제를 해결하였다.
3. 시뮬레이션 결과 및 논의
탱크 내부 유동이 선체 운동에 미치는 영향을 Kim et al. (2014b)에서 알 수 있듯이 내부 유체가 없는 상태에서의 횡동요운동의 고유주기는 약 0.45rad/s이다. 그러나 Fig. 1에서의 다른 적재량의 경우 내부 적재 유체 화물에 의해 고유주기의 극점주기가 바뀌고 2개로 나뉘는 현상이 발생함을 보였다. 이는 부유체 운동의 고유 특성이 변화하는 것으로 초기 설계 시 복수개의 고유주기를 고려해야하며 이는 내부유동의 영향에 의한 변화임을 알 수 있다. Kim et al.(2014a)에서 사용한 Box-barge 형태의 FPSO(Floating production storage and offloading)와 환경 변수는 Table 1과 Table 2에 나타나 있다.
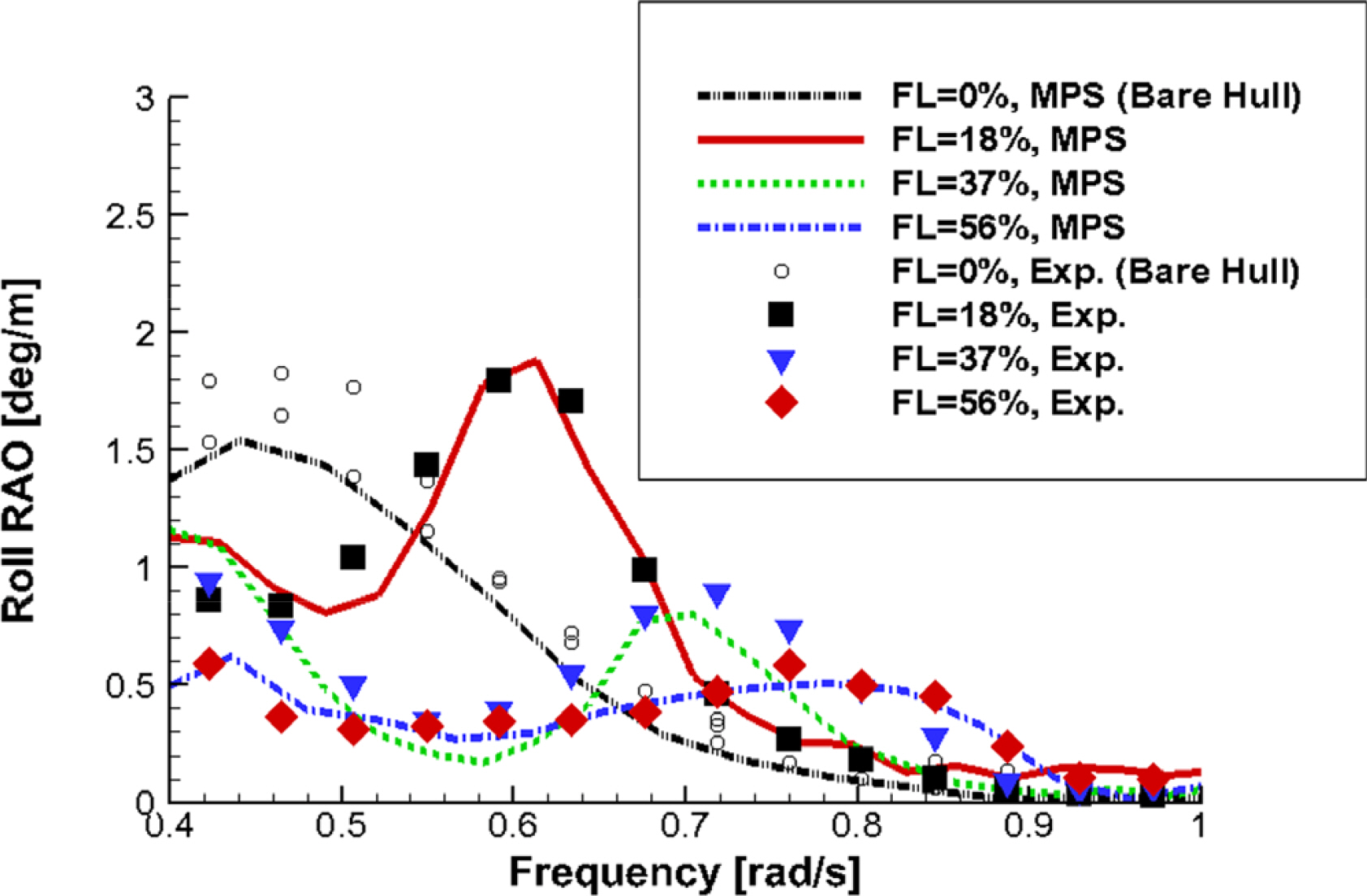
Example of roll RAO of FPSO with two inner liquid tank for various inner tank ratio (Kim et al. 2014b)
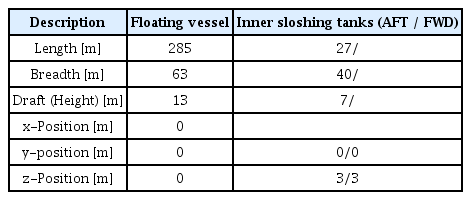
Characteristics of floating vessel and anti-rolling tank

Environmental Conditions
Kim et al.(2014b)에서 연구된 내용을 바탕으로 내부 유동이 부유체 운동에 영향을 끼침을 알 수 있었다. 본 연구에서는 이러한 현상을 재해석하여 내부 유동을 이용하여 부유체 운동 특성을 변화시키는 즉 운동을 저감시키기 위한 연구를 수행하였다. 연구 수행을 위한 부유체는 Kim et al.(2014b)에서 사용된 MARIN(Maritime Research Institute Netherlands)의 Box-barge FPSO를 사용하였으며(Fig. 2(a)) 선체에 Anti-rolling tank(ART)를 탑재하고 있다. 탑재된 ART는 Fig. 2(b)에 나타난 것과 같이 사각 형태로 내부에 닫히지 않은 격벽을 포함하며 부유체 운동의 위상(Phase angle)을 변화시키는 역할을 한다. 격벽의 길이는 ART 길이 방향의 25%를 사용하고 있으며 본 연구에서는 4개의 격벽을 일정한 간격으로 배치하였다. 탱크 제원과 적재량에 따른 탱크 고유주기는 다음 식으로 구할 수 있다.
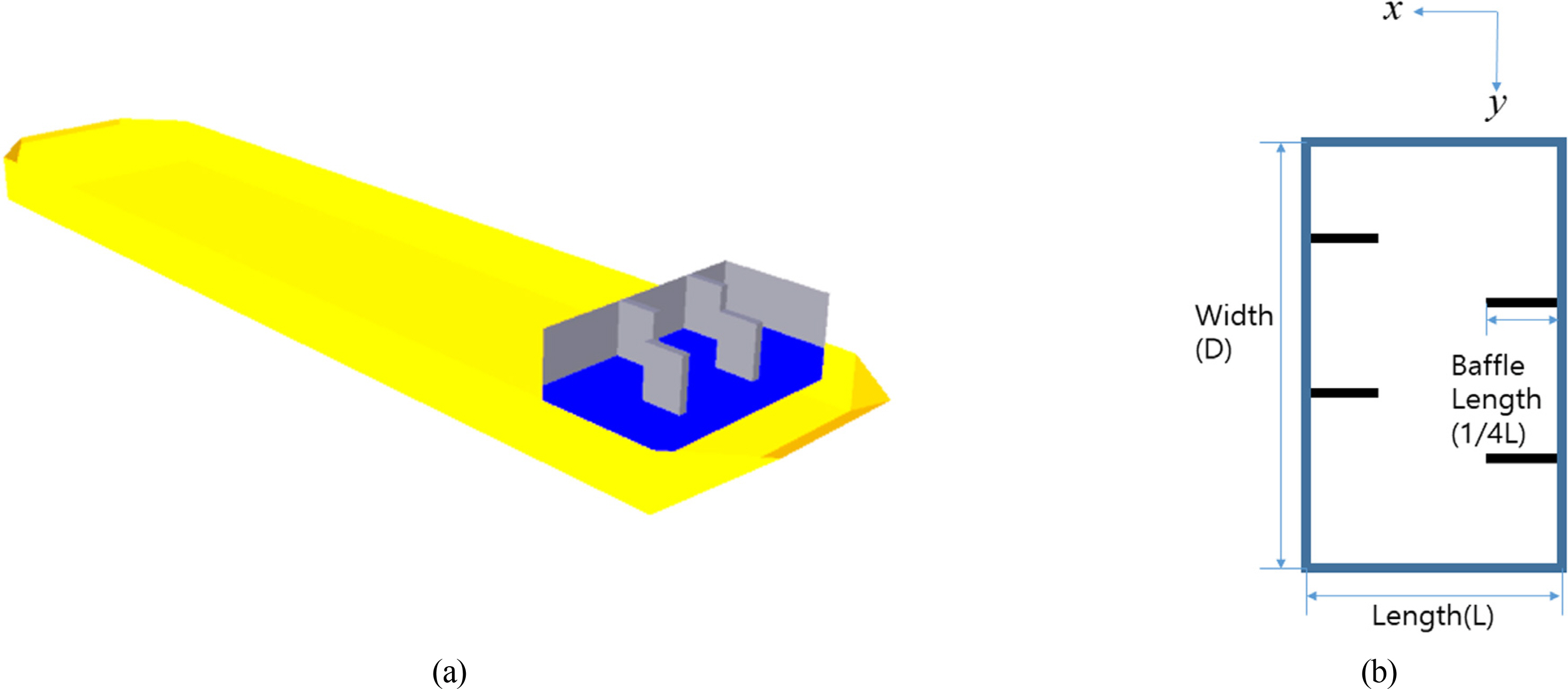
Schematic models of (a) floating vessel and (b) anti-rolling tank
여기서 L은 탱크 길이, h는 적재량, n은 운동 모드 수, g는 중력가속도이다. 본 연구에서 탱크 내부의 격벽은 탱크 적재량에 영향을 주지 않는 형태로 탱크의 고유주기를 유지하면서 위상각을 변화시키는 장치로 사용되었다. ART의 제원과 적재량 및 그에 따른 고유주기는 Table 3에 나타나 있다. 단, 격벽 효과의 확인을 위해 고유주기는 격벽 효과를 고려하지 않고 계산하였으며 그 값은 Table 3에 나타나있다. 또한 ART의 위치에 의한 영향을 평가하기 위해 x축 방향으로 3가지 경우를 설정하였으며, 그 위치는 선수부, 선체 중앙, 그리고 선미부로 설정하였다.
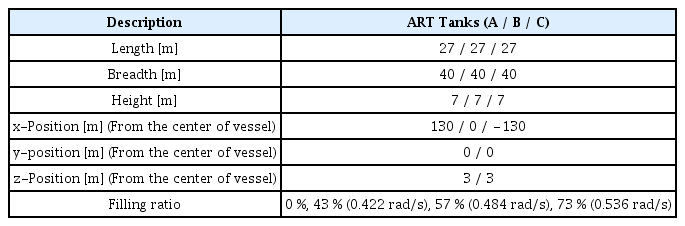
Characteristics of floating vessel and anti-rolling tank
ART를 탑재한 선박의 운동 시뮬레이션에 앞서 격벽의 효과를 확인하기 위해 ART의 단독 운동 시뮬레이션을 수행하였다. 탱크는 Table 3에 나타나 있는 탱크를 사용하였으며 격벽이 있는 경우와 없는 경우에 대해 각각 시뮬레이션을 수행하였다. 탱크는 부유체의 좌우동요 및 횡동요 운동의 영향이 지배적이기 때문에 x축 상에서 y=0.5sin[(2π)/(1.3t)]으로 강제 운동한다. ART의 단독 운동 시뮬레이션은 적재량이 50%가 넘어 2상유동이 발생할 수 있는 범위를 제외한 43% 적재된 경우에 대해 시뮬레이션을 수행하였다. 탱크의 강제 운동 주기는 고유주기에 인접한 값으로 식 (9)에 의해 1.3s로 설정하였다. 격벽의 유무에 따른 ART의 고유주기의 변화를 확인하기 위해 ART의 벽면에 가해는 압력을 측정하였으며, 측정 방식은 3차원 ART의 좌측면의 바닥으로부터 1.2m 위에 위치한 지점에서의 값을 평균화 하였다. 이는 전체 벽면의 압력을 측정하였을 시 설정한 바닥면으로부터 1.2m 떨어진 지점에서의 압력값이 지배적이었기 때문에 그 이외의 압력을 모두 계산하게 되면 노이즈 등에 의해 정확한 값의 측정이 어렵다고 판단하였다. 측정 부위에서의 압력비교와(Fig. 3(a))와 압력의 Fast Fourier transfer 방식을 이용한 주파수영역 변환값 비교(Fig. 3(b))를 통해 탱크 내 유체 적재률(43%)에 따른 고유주기는 약 0.5rad/s로 일치함을 알 수 있다. 그러나 격벽 효과에 의해 고유주기에서 압력은 감소하고 약 0.25rad/s와 0.75rad/s에서 압력이 증가하는 것을 알 수 있다. 이는 격벽이 탱크 내부 유동에 의해 발생하는 하중의 위상 변화를 줄 수 있음을 알 수 있다. 또한 Cho et al.(2017)을 통해 PNU-MPS법을 이용한 격벽의 효과 및 검증 결과를 재확인할 수 있다. PNU-MPS법을 이용한 이유는 ART를 이용한 문제는 단상 유동이며, 이미 많은 연구를 통해 확립된 안정적인 방법론을 선택하기 위함이다.
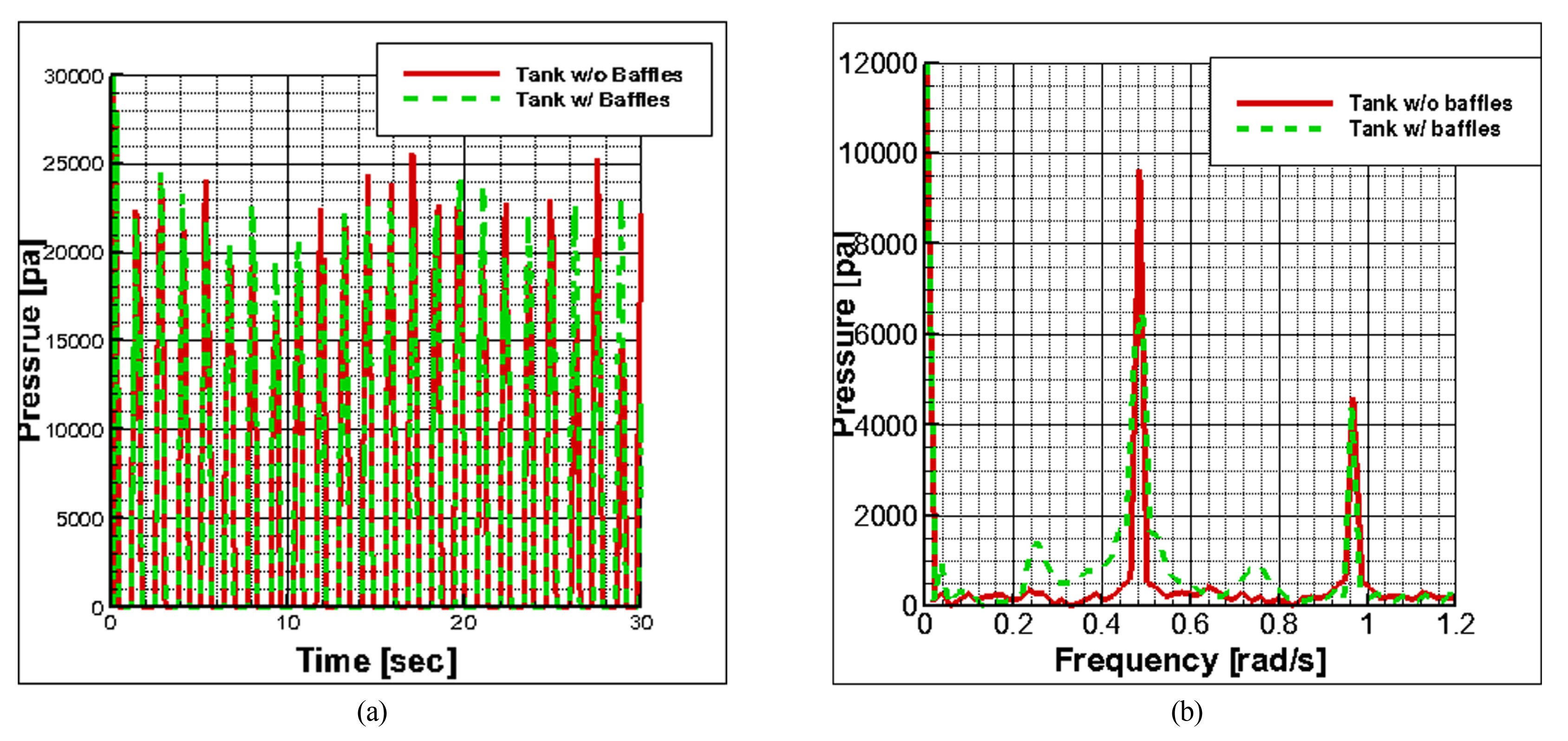
Comparison of baffles effects from (a) time history and (b) FFT results
ART가 부유체 운동에 미치는 영향을 평가하기 위해 환경조건은 MARIN에서 수행한 실험과 동일하며, Table 2에 나타나 있다. 부유체의 운동은 ART의 성능에 직접적인 영향을 미칠 것으로 판단되는 좌우동요와 횡동요만을 고려하였다. 시뮬레이션에 사용된 유체 입자는 적재율이 43%인 경우 69,056개, 57%인 경우 77,592개, 71%인 경우 86,128개이며, 초기 입자간 거리는 모두 0.5m이다. 중력가속도는 9.81m/s2, 동점성계수는 10-6m2/s이며 표면장력 효과는 무시하였다. 또한 격벽의 두께는 입자 4개의 두께로써 2m의 두께를 가지도록 설정하였다.
Fig. 4는 ART의 적재율에 따른 선박의 좌우동요 및 횡동요에 대한 진폭 응답 함수(RAO, Response amplitude operators)이다. 좌우동요에 대해서는 의미 있는 변화가 없음이 관찰되었다. 이는 ART가 좌우동요에는 영향을 끼치지 않음을 알 수 있다. 횡동요 운동에 대해서는 Fig. 1의 시뮬레이션 결과와는 다른 경향을 보인다. Fig 4에서는 내부 유동에 의해 진폭 응답 함수의 진폭과 극점의 주기의 변화가 관찰된 반면, ART의 경우에는 극점 주기는 변하지 않고 진폭만 변하였다. 이는 ART가 횡동요 운동을 억제만 하고 부유체의 고유 특성은 변화시키지 않는다는 것을 알 수 있다. 따라서 ART는 횡동요 운동 저감 본연의 목적에 효과적임을 알 수 있다.

RAO of FPSO with variously filled ART for (a) sway motion and (b) roll motion
ART의 위치가 부유체 운동에 미치는 영향을 확인하기 위해 Table 3에서 나타난 것과 같이 선수, 선체중앙, 선미에 ART를 배치하고 시뮬레이션을 수행하였다. Fig. 5는 표 2의 환경조건 하에서 적재율이 43%일 때 ART를 탑재한 부유체의 운동에 대한 진폭 응답 함수이다. 만약 ART의 적재율이 동일하다면 ART의 위치에 따른 진폭 응답 함수의 유의미한 변화가 없음이 관찰할 수 있었다. 이는 횡동요 운동에 영향을 미치는 주요인자는 ART의 위치가 아니라 ART의 존재여부와 적재율임을 알 수 있다. ART의 영향에 대한 계산은 선박의 중심으로부터 탱크까지의 거리를 이용하였다. 입자법의 경우는 각각의 입자가 물리량을 가지고 운동하기 때문에 절대좌표계에서의 위치가 주어지면 이를 이용한 질량의 이동 및 자유표면의 운동에 의한 관성모멘트는 쉽게 구해질 수 있다. 본 연구에서는 외력으로써의 내부 유체의 영향을 운동방정식에 적용하였으며, 운동방정식의 질량 행렬에 대한 무게중심의 이동 및 관성모멘트 변화는 반영하지 않았다. 또한 충전율이 50%가 넘는 경우 내부 유동이 단산유동이 아닌 2상 유동으로 변화될 수 있으나, 본 연구의 목적에는 그 변화가 큰 비중을 차지하고 있지 않다고 판단하여 단상 유동으로 가정하였다.
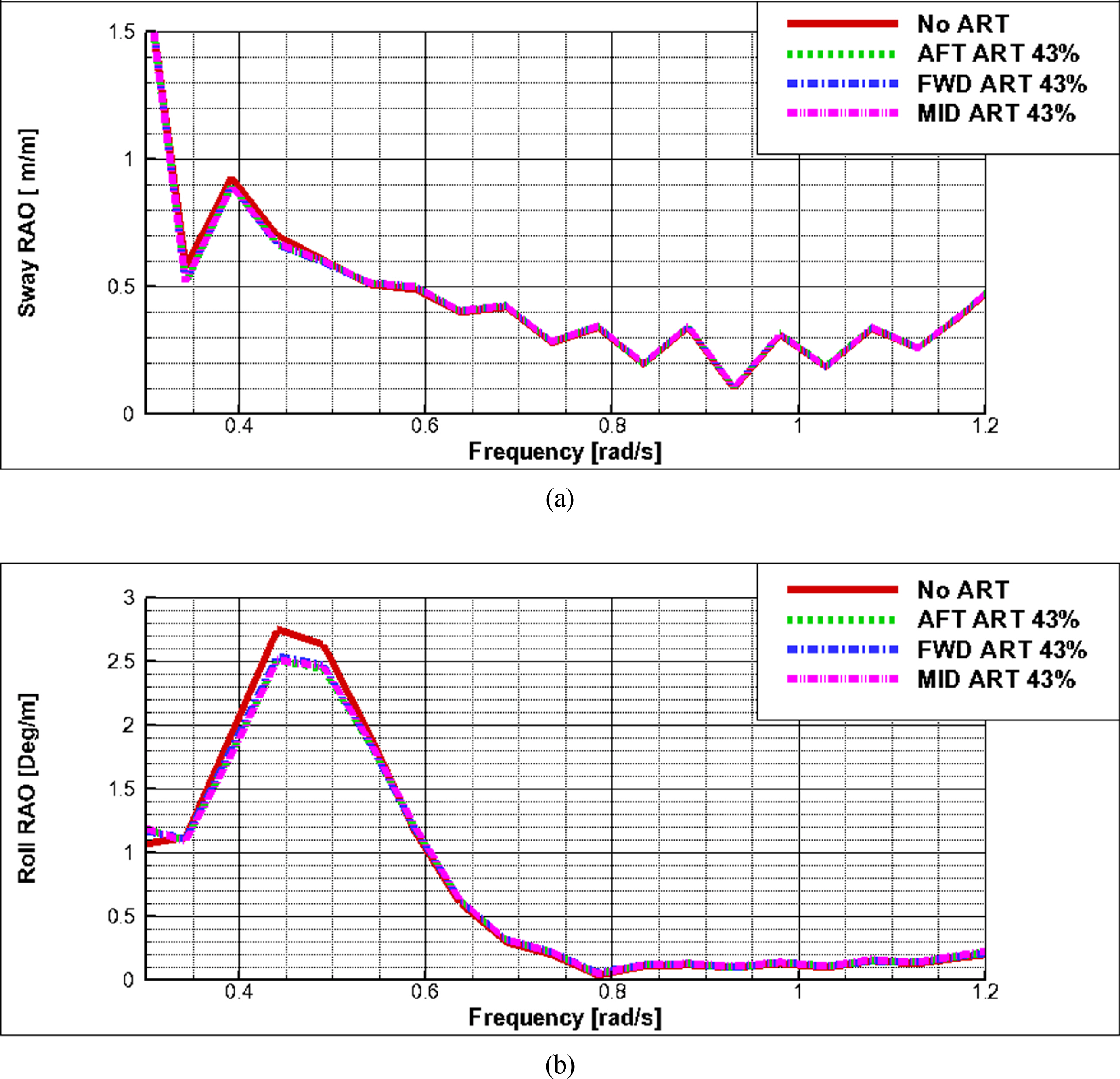
RAO of FPSO with variously positioned ART for (a) sway motion and (b) roll motion
4. 결론 및 고찰
본 연구에서는 부유체 운동 프로그램과 입자기반 전산유체역학 프로그램을 동적 연성하여 부유체 운동에 ART가 미치는 영향에 대해 연구를 수행하였다. 선박의 운동은 포텐셜 기반의 BEM을 이용하였으며, ART 내부 유동의 시뮬레이션은 MPS법을 이용하였다.
본 연구에서는 단상 유동형 입자기반 전산유체역학 프로그램인 PNU-MPS법을 사용하여 격벽이 추가된 내부 유체 탱크 단독 실험을 수행하였다. 측정 된 압력의 시계열을 이용하여 주파수계열에서의 시계열을 확보하였으며, 확보된 주파수계열의 데이터를 통해 고유주기의 변화를 관찰하였다. 그 결과 격벽의 유무에 따라 탱크의 고유주기는 위상의 변화로 인해 변화가 발생함을 알 수 있었다.
본 연구에서 고안된 ART는 좌우동요에는 영향을 미치지 않고, 횡동요에 대해 진폭 응답 함수의 값(진폭)을 감소시키면서도 고유주기의 변화는 없음이 확인되었다. 이는 ART 추가로 인해 횡동요 운동은 저감되며, 설계 시 고유주기의 변화에 따른 영향을 고려할 필요가 없음을 의미한다.
본 연구는 ART를 이용한 부유체 운동 제어의 기반이 될 것으로 사료되며, 향후 ART 내 격벽의 크기 및 개수 등이 선박의 운동에 미치는 영향에 대해 연구할 예정이다.
Acknowledgements
본 연구는 2018학년도 동명대학교 교내학술연구비지원(과제번호/2018F027) 및 2018년도 정부(교육부)의 재원으로 한국연구재단의 지원을 받아 수행된 기초연구사업(No. NRF-2018R1D1A1B07048254) 지원에 의해 이루어졌습니다. 지원에 감사드립니다.