


1. ņä£ ļĪĀ
ņĄ£ĻĘ╝ļōżņ¢┤ ļ¼┤ņØĖņäĀļ░ĢņØś ļ»╝Ļ░äļČäņĢ╝ ņłśņÜö(ĒÖśĻ▓Įļ¬©ļŗłĒä░ļ¦ü, ĒåĄņŗĀ) ļ░Å ĻĄ░ņé¼ ļ¬®ņĀüņØś ņłśņÜö(ņĀĢņ░░, Ļ▓Įļ╣ä)Ļ░Ć ņ”ØļīĆļÉ©ņŚÉ ļö░ļØ╝ ļ¼┤ņØĖņäĀļ░ĢĻ│╝ Ļ┤ĆļĀ©ļÉ£ ņŚ░ĻĄ¼Ļ░Ć ĒÖ£ļ░£Ē׳ ņłśĒ¢ēļÉśĻ│Ā ņ׳ļŗż. ļ¼┤ņØĖņäĀļ░ĢņØĆ ĻĘ╣ĒĢ£ĒÖśĻ▓ĮņŚÉņä£ņØś ņ×äļ¼┤ņÖĆ Ļ░ÖņØ┤ ņ£äĒŚśļÅäĻ░Ć ļåÆņØĆ ņ×äļ¼┤ ļśÉļŖö ļ│Ąņ×ĪĒĢ£ ņØśņé¼Ļ▓░ņĀĢņØ┤ ĒĢäņÜöņŚåļŖö ļŗ©ņł£ ļ░śļ│Ą ņ×æņŚģņŚÉ ļīĆĒĢśņŚ¼ ĻĖ░ņĪ┤ņØś ņ£ĀņØĖņ▓┤Ļ│äļź╝ ļīĆņ▓┤ĒĢśņŚ¼ ņØĖĻ░äņØś ņĢłņĀäņä▒ņØä Ē¢źņāüņŗ£ĒéżĻ│Ā ņØĖļĀźņØś Ļ░£ņ×ģņØä ņĄ£ņåīĒÖö ĒĢĀ ņłś ņ׳ļŗżļŖö ņןņĀÉņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż.
ļ¼┤ņØĖņäĀļ░ĢņØś ņĢłņĀĢņĀüņØ┤Ļ│Ā ĒÜ©Ļ│╝ņĀüņØĖ ņ×äļ¼┤ņłśĒ¢ēņØä ņ£äĒĢ┤ņä£ļŖö ĻĖ░ņĪ┤ņŚÉ ņØĖĻ░äņØś ņŚŁĒĢĀņØ┤ņŚłļŹś ņŻ╝ļ│ĆĒÖśĻ▓Į ņØĖņ¦Ć ļ░Å ņØśņé¼Ļ▓░ņĀĢ Ļ│╝ņĀĢņØä ļ¼┤ņØĖņäĀļ░Ģļé┤ņŚÉ Ēāæņ×¼ļÉ£ ņ╗┤Ēō©Ēä░Ļ░Ć ņłśĒ¢ēĒĢ┤ņĢ╝ĒĢ£ļŗż. ĒĢśņ¦Ćļ¦ī ļ¼┤ņØĖņäĀļ░Ģ ņ×Éņ£©ņÜ┤ĒĢŁĻĖ░ņłĀņØś ĻĖ░ņłĀņä▒ņłÖļÅäĻ░Ć ņÖäņĀäĒĢ£ ņ×Éņ£©ņÜ┤ĒĢŁņØä ņ£äĒĢ£ ņłśņżĆĻ╣īņ¦ĆļŖö ļÅäļŗ¼ĒĢśņ¦Ć ļ¬╗ĒĢ£ Ļ┤ĆĻ│äļĪ£ ņĢäņ¦üĻ╣īņ¦ĆļÅä ļÅäĒé╣ ļō▒ ņØ╝ļČĆ ņ×äļ¼┤ņŚÉ ļīĆĒĢ┤ņä£ļŖö ņé¼ņÜ®ņ×ÉņØś ņøÉĻ▓®ņĪ░ņĀĢņØä ĒåĄĒĢ┤ ņÜ┤ņÜ®ļÉśļŖö Ļ▓āņØ┤ ĒśäņŗżņØ┤ļŗż. ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ņØ┤ļ¤¼ĒĢ£ ļÅäĒé╣Ļ│╝ņĀĢņŚÉņä£ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ļ¼┤ņØĖņäĀļ░ĢņØ┤ ņ×Éņ£©ņĀüņ£╝ļĪ£ ņ£ĀļÅäļÉśļÅäļĪØ ĒĢśļŖö ņāłļĪ£ņÜ┤ ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņĀ£ņĢłĒĢśņśĆĻ│Ā, ņØ┤ļź╝ ĒåĄĒĢ┤ ņØĖĻ░äņØś Ļ░£ņ×ģņØä Ļ░Éņåīņŗ£ĒéżĻ│Ā ļ¼┤ņØĖņäĀļ░ĢņØś ņ×Éņ£©ļÅä(Degree of autonomy)ļź╝ ņ”ØĻ░Ćņŗ£ĒéżļŖö Ļ▓āņØä ļ¬®Ēæ£ļĪ£ ĒĢśņśĆļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ļ¼┤ņØĖņäĀļ░ĢņØ┤ ņøĆņ¦üņØ┤ļŖö ņÜ┤ļÅÖņ▓┤Ļ░Ć ņĢäļŗī, ņĀĢņ¦ĆļÉśņ¢┤ ņ׳ļŖö ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ļīĆĒĢśņŚ¼ ņĀĢļ®┤ļ░®Ē¢źņ£╝ļĪ£ ļÅäĒé╣ĒĢśļŖö Ļ▓ĮņÜ░ļź╝ ņŚ░ĻĄ¼ļīĆņāüņ£╝ļĪ£ ņäżņĀĢĒĢśņśĆļŗż. Fig. 1ņØĆ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņŚ░ĻĄ¼ļīĆņāüņ£╝ļĪ£ ņäĀņĀĢĒĢ£ ļ¼┤ņØĖņäĀļ░Ģ ļÅäĒé╣ņØś ņśłņŗ£ļź╝ ļéśĒāĆļé┤Ļ│Ā ņ׳ļŗż. ļ¼┤ņØĖņäĀļ░ĢņØĆ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØś ņĀĢļ│┤(ņ£äņ╣ś, ļ░®Ē¢ź, Ēü¼ĻĖ░)ļź╝ ņé¼ņĀäņŚÉ ņĢīĻ│Ā ņ׳ļŗżĻ│Ā Ļ░ĆņĀĢĒĢśņśĆĻ│Ā, ņØ┤ļź╝ ļ░öĒāĢņ£╝ļĪ£ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ĒĢśņśĆļŗż.
Fig.┬Ā1
Example of forward-direction docking of USV (Image Source : Maritime Robotx 2014 USV Competition)
ļ¼┤ņØĖņäĀļ░ĢņØś ļÅäĒé╣ņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼ļŖö ņŻ╝ļĪ£ ļ¼┤ņØĖņäĀļ░ĢĻ│╝ ņ×Éņ£©ņłśņżæņÜ┤ļÅÖņ▓┤(AUV, Autonomous underwater vehicle) ļśÉļŖö ļ¬©ņäĀ(Mother ship)Ļ│╝ņØś ļÅäĒé╣ņŚÉ ļīĆĒĢśņŚ¼ ņØ┤ļŻ©ņ¢┤ņĀĖņÖöļŗż. Martins et al. (2007)ņØĆ ņłśņāüņŚÉņä£ Ēæ£ļźśĒĢśļŖö ņ×Éņ£©ņłśņżæņÜ┤ļÅÖņ▓┤ļź╝ ļ¼┤ņØĖņäĀļ░ĢņŚÉ ņäżņ╣śļÉ£ ļ╣äņĀäņä╝ņä£ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ĒāÉņ¦ĆĒĢśĻ│Ā, ņØ┤ļź╝ ļ░öĒāĢņ£╝ļĪ£ ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢśņŚ¼ ļÅäĒé╣ĒĢśļŖö ņŚ░ĻĄ¼ļź╝ ņłśĒ¢ēĒĢ£ ļ░ö ņ׳ļŗż. Dunbabin et al. (2007)Ļ│╝ Dunbabin et al. (2008)ņØĆ ņĀĢņ¦ĆļÉśņ¢┤ņ׳ļŖö AUVņŚÉ ļīĆĒĢśņŚ¼ ļ¼┤ņØĖņäĀļ░ĢņØ┤ ļÅäĒé╣ĒĢśļŖö ņŚ░ĻĄ¼ļź╝ ņłśĒ¢ēĒĢ£ ļ░ö ņ׳ļŖöļŹ░ ņØ┤ļĢī VFF (Virtual force field)ņĢīĻ│Āļ”¼ņ”śņØä ņé¼ņÜ®ĒĢśņŚ¼ ļ¼┤ņØĖņäĀļ░ĢņØä ņ£ĀļÅäĒĢśņśĆļŗż. Breivik et al. (2006), Breivik et al. (2008)Ļ│╝ Breivik and Loberg (2011)ņØĆ ņøĆņ¦üņØ┤ļŖö ļ¬©ņäĀĻ│╝ ļ¼┤ņØĖņäĀļ░ĢĻ░äņØś ļÅäĒé╣ņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼ļź╝ ņłśĒ¢ēĒĢ£ ļ░ö ņ׳ļŗż. ļ¬©ņäĀņØä ņČöņóģĒĢśĻĖ░ņ£äĒĢ┤ Constant bearingņ£ĀļÅäļ▓Ģņ╣ÖĻ│╝ ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ņĪ░ĒĢ®ĒĢśņŚ¼ ļ¬©ņäĀņØś ĻĘ╝ņ▓śņŚÉņä£ ņøĆņ¦üņØ┤ļŖö Ļ░ĆņāüņØś ņĀÉņØä ņČöņóģĒĢśļŖö ļ░®ņŗØņ£╝ļĪ£ ļÅäĒé╣ņØä ņłśĒ¢ēĒĢśņśĆļŗż. ņĢ×ņä£ ņ¢ĖĻĖēĒĢ£ ĻĖ░ņĪ┤ ņ£ĀļÅäļ▓Ģņ╣ÖļōżņØś Ļ▓ĮņÜ░, ņøĆņ¦üņØ┤ļŖö ļ¬©ņäĀ ļśÉļŖö ņ×Éņ£©ņłśņżæņÜ┤ļÅÖņ▓┤ļź╝ ļÅäĒé╣ļīĆņāüņ£╝ļĪ£ ņé╝Ļ│Āņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ļÅäĒé╣ņŖżĒģīņØ┤ņģśĻ│╝ņØś ļÅäĒé╣ņŚÉņä£ Ļ│ĀļĀżĒĢ┤ņĢ╝ ĒĢĀ ļÅäĒé╣ļČłĻ░ĆņśüņŚŁņ£╝ļĪ£ņØś ņ¦äņ×ģ, ļ¼┤ņØĖņäĀļ░ĢņØś ļÅÖņŚŁĒĢÖ ļō▒ņŚÉ ļīĆĒĢ£ ņÜöņåīļź╝ Ļ│ĀļĀżĒĢĀ ņłś ņŚåļŗżļŖö ĒŖ╣ņ¦ĢņØ┤ ņ׳ļŗż. ļö░ļØ╝ņä£, ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņØ┤ļōż ņÜöņåīļź╝ Ļ│ĀļĀżĒĢĀ ņłś ņ׳ļŖö ļ¼┤ņØĖņäĀļ░ĢņØś ļÅäĒé╣ ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņĀ£ņĢłĒĢśĻ│Āņ×É ĒĢ£ļŗż.
ļ│Ė ļģ╝ļ¼ĖņØś ĻĄ¼ņä▒ņØĆ ļŗżņØīĻ│╝ Ļ░Öļŗż. 2ņןņŚÉņä£ļŖö ļ¼┤ņØĖņäĀļ░ĢņØś ļÅäĒé╣ņŚÉ ņé¼ņÜ®ļÉśļŖö Ļ│ĀņĀä ņ£ĀļÅäļ▓Ģņ╣ÖņŚÉ ļīĆĒĢśņŚ¼ ņäżļ¬ģĒĢśņśĆļŗż. 3ņןņŚÉņä£ļŖö ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ ņĀ£ņĢłĒĢśļŖö ĒżĒģÉņģ£ ĒĢäļō£ ĻĖ░ļ░śņØś ņ£ĀļÅäļ▓Ģņ╣ÖņŚÉ ļīĆĒĢśņŚ¼ ņäżļ¬ģĒĢśĻ│Ā ņØ┤ļź╝ĒåĄĒĢ┤ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ĒĢśļŖö ļ░®ļ▓ĢņŚÉ ņäżļ¬ģĒĢśņśĆļŗż. 4ņןņŚÉņä£ļŖö ņĀ£ņĢłļÉ£ ņ£ĀļÅäļ▓Ģņ╣ÖņØä ĻĖ░ļ░śņ£╝ļĪ£ ļÅäĒé╣ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢśĻ│Ā ļ¬¼Ēģīņ╣┤ļź╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒżĒģÉņģ£ ĒĢäļō£ ĻĖ░ļ░ś ņ£ĀļÅäļ▓Ģņ╣ÖņØś ņä▒ļŖźņØä Ļ▓Ćņ”ØĒĢśņśĆļŗż. 5ņןņŚÉņä£ļŖö ļ│Ė ņŚ░ĻĄ¼ņŚÉ ļīĆĒĢ£ Ļ▓░ļĪĀĻ│╝ Ē¢źĒøä ņłśĒ¢ēĒĢĀ ņŚ░ĻĄ¼Ļ│äĒÜŹ ļō▒ņØä ņĀ£ņŗ£ĒĢśņśĆļŗż.
2. ļÅäĒé╣ņ£ĀļÅäļ▓Ģņ╣ÖņäżĻ│ä
2.1 ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣Ö(Pure pursuit guidance law)
ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØĆ ļ¼┤ņØĖņäĀļ░ĢņØś ņäĀņłśĻ░ü(Heading angle)ņØ┤ ĒĢŁņāü ļ¬®Ēæ£ļ¼╝ņØä Ē¢źĒĢśļÅäļĪØ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ĒĢśļŖö ļ▓Ģņ╣ÖņØ┤ļŗż. ļ¼┤ņØĖņäĀĻ│╝ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØś ņāüļīĆņ£äņ╣śņŚÉ ņØśĒĢ┤ ņŗ£ņäĀĻ░ü(Line of sight)ņØ┤ Ļ▓░ņĀĢņØ┤ ļÉśļ®┤ ļ¼┤ņØĖņäĀņØś ņäĀņłśĻ░üļ¬ģļĀ╣ņØä ņŗ£ņäĀĻ░üĻ│╝ ļÅÖņØ╝ĒĢśĻ▓ī ļ¦īļō£ļŖö ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ĒĢ£ļŗż(Fig. 2). ļ¼┤ņØĖņäĀņ£╝ļĪ£ļČĆĒä░ ļÅäĒé╣ņŖżĒģīņØ┤ņģśĻ╣īņ¦ĆņØś ņŗ£ņäĀĻ░üņØĆ ņĢäļלņØś ņŗØ (1)ņŚÉ ņØśĒĢ┤ Ļ│äņé░ļÉ£ļŗż.
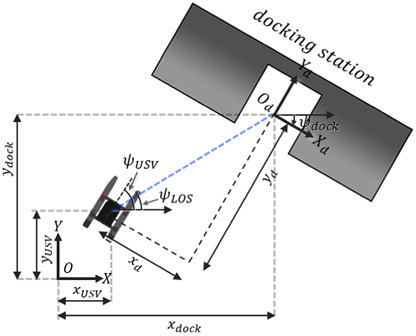

ļ¬®Ēæ£ļ¼╝Ļ╣īņ¦ĆņØś ņŗ£ņäĀĻ░üņØ┤ Ļ▓░ņĀĢļÉśļ®┤, ņŗ£ņäĀĻ░üĻ│╝ ļ¼┤ņØĖņäĀņØś ņäĀņłśĻ░üņØś ņ░©ņØ┤ļź╝ 0ņ£╝ļĪ£ ļ¦īļōżļÅäļĪØ ņäĀņłśĻ░ü ļ¬ģļĀ╣ņØä ņŗØ (2)ņÖĆ Ļ░ÖņØ┤ ņĀĢņØśĒĢśĻ│Ā, Ļ│äņé░ļÉ£ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņČöņóģĒĢ£ļŗż.

ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØś Ļ▓ĮņÜ░ ņäĀņłśĻ░üļ¬ģļĀ╣ņØä ņČöņóģĒĢĀ ļĢī ļÅäĒé╣ņØś ņ┤łĻĖ░ņāüĒā£ņŚÉņä£ņØś ĒÜĪļ░®Ē¢ź ņśżņ░©(xd)Ļ░Ć Ēü┤ Ļ▓ĮņÜ░, ļÅäĒé╣ ņŖżĒģīņØ┤ņģśņ£╝ļĪ£ ļōżņ¢┤ņśżļŖö ņ×ģņé¼Ļ░üņØ┤ ņ╗żņ¦ĆĻ▓ī ļÉ£ļŗżļŖö ļŗ©ņĀÉņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ņØ┤ Ļ▓ĮņÜ░ ļÅäĒé╣ ņŖżĒģīņØ┤ņģśņØś Ļ░ĆļĪ£ĒÅŁņØ┤ ņČ®ļČäĒ׳ Ēü¼ņ¦Ć ņĢŖņ£╝ļ®┤ Fig. 3ņØś Ļ▓ĮņÜ░ņ▓śļ¤╝ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØś ņ×ģĻĄ¼ņĖĪļ®┤Ļ│╝ ņČ®ļÅīĒĢśļŖö Ļ▓░Ļ│╝Ļ░Ć ļ░£ņāØĒĢĀ ņłś ņ׳ļŗż. ņØ┤ļ¤¼ĒĢ£ ĒśäņāüņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņāüļīĆņĀüņ£╝ļĪ£ ļÅäĒé╣ņŖżĒģīņØ┤ņģśĻ│╝ ļ©╝ Ļ▒░ļ”¼ņŚÉ ņ׳ņØä ļĢī ĒÜĪļ░®Ē¢ź ņśżņ░©ļź╝ ņĄ£ļīĆĒĢ£ Ļ░Éņåīņŗ£ĒéżļŖö Ļ│╝ņĀĢņØ┤ ĒĢäņÜöĒĢ£ļŹ░ ņØ┤ļź╝ ņ£äĒĢ┤ ņł£ņłś/ņĢ×ņä¼ ņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ĒÖ£ņÜ®ĒĢśĻĖ░ļÅä ĒĢ£ļŗż.

2.2 ņł£ņłś/ņĢ×ņä¼ ņČöņĀüņ£ĀļÅäļ▓Ģņ╣Ö(Pure/lead pursuit guidance law)
ņł£ņłś/ņĢ×ņä¼ ņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØĆ ĒĢŁņŻ╝ņØś ņ┤łĻĖ░ļŗ©Ļ│äņŚÉņä£ļŖö ņŗ£ņäĀĻ░üņŚÉ ņĢ×ņä¼Ļ░ü Žālead ļź╝ ņČöĻ░ĆĒĢ£ ņĢ×ņä¼ ņČöņĀüņ£ĀļÅäļ▓Ģņ╣Ö(Lead pursuit guidance law)ņØä ņé¼ņÜ®ĒĢśņŚ¼ ĒÜĪļ░®Ē¢ź ņśżņ░©ļź╝ Ļ░Éņåīņŗ£ĒéżĻ│Ā, ĒÜĪļ░®Ē¢ź ņśżņ░©ņØś ņĀłļīĆĻ░ÆņØ┤ ņé¼ņĀäņŚÉ ņĀĢņØśļÉ£ ĒŖ╣ņĀĢ ļ▓öņ£ä(Žćlead) ņØ┤ļé┤ņŚÉ ļōżņ¢┤ņśżĻ▓ī ļÉśļ®┤, ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØä Ē¢źĒĢ┤ ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņ£ĀļÅäĒĢśļŖö ļ░®ļ▓ĢņØ┤ļŗż. ņł£ņłś/ņĢ×ņä¼ ņČöņĀüņ£ĀļÅäļ▓Ģņ╣Öņ£╝ļĪ£ ņāØņä▒ļÉ£ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņłśņŗØņ£╝ļĪ£ ļéśĒāĆļé┤ļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż.

ņØ┤ļĢī Žālead ļŖö ņĢ×ņä¼Ļ░üņ£╝ļĪ£ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņĀĢņØśļÉ£ļŗż.

ņØ┤ļĢī, ŽāļŖö ņĢ×ņä¼Ļ░üņØś ņĀłļīĆĻ░ÆņØä ņØśļ»ĖĒĢśļŖö Ļ░Æņ£╝ļĪ£, ņ¢æņØśĻ░ÆņØä Ļ░¢ļŖöļŗż. ņł£ņłś/ņĢ×ņä¼ ņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļ¼┤ņØĖņäĀņØä ļÅäĒé╣ņŖżĒģīņØ┤ņģśņ£╝ļĪ£ ņ£ĀļÅäĒĢĀ Ļ▓ĮņÜ░, ņĢ×ņä¼Ļ░üņØś ņĀłļīĆĻ░ÆņØĖ ŽāņØś Ēü¼ĻĖ░ņÖĆ ļæÉ ļŗ©Ļ│äņØś Ļ▓ĮĻ│äĻ░Ć ļÉśļŖö ĒÜĪļ░®Ē¢ź ņśżņ░© ŽćleadĻ░ÆņØä ņ¢┤ļ¢╗Ļ▓ī ņĀĢņØśĒĢśļŖÉļāÉņŚÉ ļö░ļØ╝ņä£ ļ¼┤ņØĖņäĀņØś ņĀæĻĘ╝ĻČżņĀüņØ┤ ļŗ¼ļØ╝ņ¦äļŗż. ŽćleadĻ░ÆņØś Ēü¼ĻĖ░Ļ░Ć ļäłļ¼┤ Ēü¼ļ®┤, ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢśļŖö ņŗ£ņĀÉņØ┤ ļäłļ¼┤ ļ╣©ļØ╝ņĀĖ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ņĀæĻĘ╝ĒĢĀ ļĢī ņČ®ļČäĒ׳ ņ×æņØĆ Ēü¼ĻĖ░ņØś ņ×ģņé¼Ļ░üņØä Ļ░¢ņ¦Ć ļ¬╗ĒĢĀ ņłś ņ׳ņ£╝ļ®░, ŽāĻ░ÆņØ┤ ļäłļ¼┤ Ēü¼ļ®┤ ņČöņóģļŗ©Ļ│äĻ░Ć ļ░öļĆīļŖö ĻĄ¼Ļ░äņŚÉņä£ ļČłņŚ░ņåŹņĀüņØĖ Ēü░ ņ░©ņØ┤ļź╝ Ļ░¢ļŖö ņ£ĀļÅäļ¬ģļĀ╣ņ£╝ļĪ£ ņØĖĒĢ┤ Ļ░æņ×æņŖżļ¤¼ņÜ┤ ĻĖ░ļÅÖņØä ĒĢśĻ▓īļÉ£ļŗżļŖö ļŗ©ņĀÉņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņØ┤ļ¤¼ĒĢ£ ĻĖ░ņĪ┤ ņČöņĀüĻĖ░ļ░ś ņ£ĀļÅäļ▓Ģņ╣ÖļōżņØś ļŗ©ņĀÉņØä ļ│┤ņÖäĒĢśņŚ¼, ĒÜĪļ░®Ē¢ź ņśżņ░©ļź╝ ļÅäĒé╣ņØś ņ┤łĻĖ░ļŗ©Ļ│äņŚÉ Ļ░Éņåīņŗ£ĒéżĻ│Ā, ņŚ░ņåŹņĀüņØĖ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ņŗ£Ēé¼ ņłś ņ׳ļŖö ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņĀ£ņĢłĒĢśĻ│Āņ×É ĒĢ£ļŗż.
3. ĒżĒģÉņģ£ ĒĢäļō£ĻĖ░ļ░ś ņ£ĀļÅäļ▓Ģņ╣Ö
3.1 ĒżĒģÉņģ£ ĒĢäļō£ ļ¬©ļŹĖ
ĒżĒģÉņģ£ ĒĢäļō£ļź╝ ņØ┤ņÜ®ĒĢ£ ņ£ĀļÅäļ▓Ģņ╣ÖņØĆ VFF(Vector force field)ļØ╝ļŖö ņØ┤ļ”äņ£╝ļĪ£ ļ¬©ļ░öņØ╝ļĪ£ļ┤ćņØś ņČ®ļÅīĒÜīĒö╝ ļ░Å ļÅäĒé╣ ļČäņĢ╝(Jantapremjit and Wilson, 2008; Feezor et al., 2001)ņŚÉ ļ╣łļ▓łĒ׳ ņé¼ņÜ®ļÉśņŚłļŗż. ļ¼┤ņØĖņäĀļ░ĢņØś Ļ▓ĮņÜ░, ņØ╝ļ░śņĀüņ£╝ļĪ£ ĒÜĪ ļ░®Ē¢ź ņČöņ¦äĻĖ░(Side thruster)Ļ░Ć ņŚåņØä Ļ▓ĮņÜ░ ĻĄ¼ļÅÖĻĖ░Ļ░Ć ļČĆņĪ▒ĒĢ£ ņŗ£ņŖżĒģ£(Underactuated system)ņØ┤ļ»ĆļĪ£ ņł£ņłśņóīņÜ░ļÅÖņÜö(Pure sway) ņÜ┤ļÅÖņØä ļ░£ņāØņŗ£Ēé¼ ņłś ņŚåļŗż. ļö░ļØ╝ņä£, ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ļīĆĒĢ£ ĒÜĪļ░®Ē¢ź ņśżņ░©ļź╝ Ļ░Éņåīņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņĀäĒøäļÅÖņÜö(Surge)ņÖĆ ņäĀņłśļÅÖņÜö(Yaw)ņÜ┤ļÅÖņØ┤ ņŚ░ņä▒ļÉśņ¢┤ ļ░£ņāØĒĢśĻĖ░ ļ¦łļĀ©ņØ┤ļŗż. ĒĢśņ¦Ćļ¦ī ņØ╝ļ░śņĀüņ£╝ļĪ£ ļ¼┤ņØĖņäĀļ░ĢņØĆ ĒÜīņĀäļ░śĻ▓ĮņŚÉ ļīĆĒĢ£ ļ╣äĒÖĆļĪ£ļģĖļ»╣(Non-holonomic)ĒĢ£ ĻĄ¼ņåŹņĪ░Ļ▒┤ņØä Ļ░¢ĻĖ░ ļĢīļ¼ĖņŚÉ ĒÜĪļ░®Ē¢ź ņśżņ░©(xd)Ļ░Ć ņĪ┤ņ×¼ĒĢśļ®┤ņä£ ņ×æņØĆĻ░ÆņØś ņóģļ░®Ē¢ź ņśżņ░©(yd)ļź╝ Ļ░¢ļŖö Ļ▓ĮņÜ░, ņ”ē Fig. 3 ĻĘĖļ”╝ ņāü ņ£äņØś ļ¼┤ņØĖņäĀļ░ĢĻ│╝ Ļ░ÖņØĆ Ļ▓ĮņÜ░, ņäĀļ░ĢņØś Ēøäņ¦äņØ┤ļéś ļÅäĒé╣ņŖżĒģīņØ┤ņģśĻ│╝ņØś ņČ®ļÅīņŚåņØ┤ ļ¬®Ēæ£ļ¼╝ņŚÉ ļÅäļŗ¼ĒĢśļŖö Ļ▓āņØ┤ ļČłĻ░ĆļŖźĒĢ£ Ļ▓ĮņÜ░Ļ░Ć ļ░£ņāØĒĢ£ļŗż. ņØ┤ļ¤¼ĒĢ£ Ļ▓ĮņÜ░ļź╝ ļ░®ņ¦ĆĒĢśĻĖ░ņ£äĒĢ┤ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ĒÜĪļ░®Ē¢ź ņśżņ░©ļź╝ ļÅäĒé╣ņØś ņ┤łĻĖ░ļŗ©Ļ│äņŚÉ Ļ░Éņåīņŗ£ĒéżĻ│Ā, ļÅäĒé╣ņØ┤ ļČłĻ░ĆļŖźĒĢ£ ņśüņŚŁņŚÉ ņĀæĻĘ╝ĒĢśļŖö Ļ▓āņØä ļ»ĖņŚ░ņŚÉ ļ░®ņ¦ĆĒĢĀ ņłś ņ׳ļŖö ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņĀ£ņĢłĒĢśņśĆļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Fig. 6Ļ│╝ Ļ░ÖņØĆ ĒśĢņāüņØś ĒżĒģÉņģ£ ĒĢäļō£(ŽĢ(xd, yd))ļź╝ ĻĄ¼ņä▒ĒĢśĻ│Ā, ĒżĒģÉņģ£ ĒĢäļō£ ļé┤ņŚÉņä£ņØś ĻĖ░ņÜĖĻĖ░Ļ░ÆņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļ¬®Ēæ£ ņäĀņłśĻ░ü(Ø£ōdesired)ņØä Ļ│äņé░ĒĢśļŖö ļ░®ņŗØņØä ņé¼ņÜ®ĒĢśņśĆļŗż. ĒżĒģÉņģ£ ĒĢäļō£ļź╝ ĻĄ¼ņä▒ĒĢśĻĖ░ņ£äĒĢ£ ņäżĻ│äņŻ╝ņĢłņĀÉņØĆ ļŗżņØīĻ│╝ Ļ░Öļŗż.
(1) ļÅäĒé╣ņ£ĀļÅäļ▓Ģņ╣ÖņØś ņĄ£ņóģļ¬®ņĀüņØĆ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņ£╝ļĪ£ ļ¼┤ņØĖņäĀļ░ĢņØä ņ£ĀļÅäĒĢśļŖö Ļ▓āņØ┤ļŗż. ļö░ļØ╝ņä£ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØ┤ ņ£äņ╣śĒĢ£ ņśüņŚŁ(Fig. 4)ņŚÉņä£ Ļ░Ćņן ļé«ņØĆ ĒżĒģÉņģ£ņØä Ļ░¢Ļ│Ā, ņØ┤ņÖĖņØś ņśüņŚŁņŚÉņä£ļŖö ņØ┤ļ│┤ļŗż ļåÆņØĆ Ļ░ÆņØä Ļ░ĆņĀĖņĢ╝ĒĢ£ļŗż. ņ”ē, ļ¼┤ņØĖņäĀļ░ĢņØ┤ ņ×äņØśņØś ņĀÉņŚÉņä£ ņČ£ļ░£ĒĢśņŚ¼ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ Ļ░ĆĻ╣īņøīņ¦łņłśļĪØ ĒżĒģÉņģ£ Ļ░ÆņØĆ ļŗ©ņĪ░(Monotonic) Ļ░ÉņåīĒĢ┤ņĢ╝ ĒĢ£ļŗż.
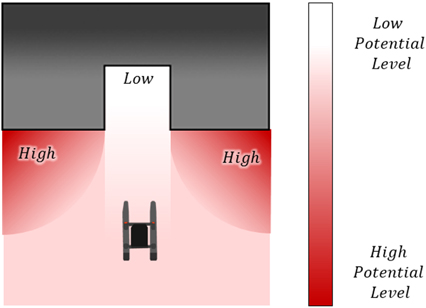
(2) ĒżĒģÉņģ£ ĒĢäļō£ļŖö ļ¼┤ņØĖņäĀļ░ĢņØ┤ ļÅäĒé╣ ļČłĻ░ĆņśüņŚŁ(Fig. 4)ņŚÉ ņĀæĻĘ╝ĒĢśļŖö Ļ▓āņØä ļ░®ņ¦ĆĒĢ┤ņĢ╝ĒĢśļ»ĆļĪ£, ĒĢ┤ļŗ╣ņśüņŚŁņŚÉņä£ ņāüļīĆņĀüņ£╝ļĪ£ ļåÆņØĆ ĒżĒģÉņģ£ Ļ░ÆņØä Ļ░ĆņĀĖņĢ╝ ĒĢ£ļŗż. ņØ┤ļ¤¼ĒĢ£ ņśüņŚŁņØä ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ĒżĒģÉņģ£ ņ¢ĖļŹĢ(Potential hill)ņØ┤ļØ╝ ņĀĢņØśĒĢśĻ│Ā, ņØ┤ļź╝ ĻĄ¼ĒśäĒĢśĻĖ░ņ£äĒĢ£ ļ░®ļ▓ĢņØä ļ│Ė ņןņØś Ēøäļ░śļČĆņŚÉ ņĀ£ņŗ£ĒĢśņśĆļŗż.
(3) ņł£ņłś/ņĢ×ņä¼ ņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØś Ļ▓ĮņÜ░ņ▓śļ¤╝ ņ×äņØśņØś Ļ▓ĮĻ│äņŚÉņä£ ļ¼┤ņØĖņäĀļ░ĢņØ┤ ļČłņŚ░ņåŹņĀüņØĖ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ĒĢśļŖö Ļ▓āņØĆ ļ¼┤ņØĖņäĀļ░ĢņØś ĻĖēņ×æņŖżļ¤¼ņÜ┤ ĻĖ░ļÅÖņØä ļ░£ņāØņŗ£ĒéżĻĖ░ ļĢīļ¼ĖņŚÉ ļ░öļ×īņ¦üĒĢśņ¦Ć ņĢŖļŗż. ņØ┤ļź╝ ļ░®ņ¦ĆĒĢśĻĖ░ņ£äĒĢ┤ņä£ļŖö ņŚ░ņåŹņĀüņØĖ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ņŗ£ĒéżļŖö ņ£ĀļÅäļ▓Ģņ╣ÖņØ┤ ĒĢäņÜöĒĢ£ļŹ░, ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņŚ░ņåŹņĀüņØĖ ĒśĢĒā£ņØś ĒĢ┤ņäØĒĢ©ņłś(Analytic function)ļōżņØś ņĪ░ĒĢ®ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒżĒģÉņģ£ĒĢäļō£ļź╝ ĻĄ¼ņä▒ĒĢśņśĆļŗż. ņØ┤ņÖĆ Ļ░ÖņØĆ ļ░®ļ▓ĢņØĆ ļŗ©ņł£ĒĢ£ ĒĢ©ņłśļōżņØś ņĪ░ĒĢ®ņ£╝ļĪ£ ņŚ░ņåŹņĀüņØĖ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ĒĢĀ ņłś ņ׳ņ£╝ļ®░, ņ£ĀļÅäļ¬ģļĀ╣ ņāØņä▒ņŚÉ ĒĢäņÜöĒĢ£ Ļ│äņé░ņåŹļÅäĻ░Ć ļ╣Āļź┤ļŗżļŖö ņןņĀÉņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż.



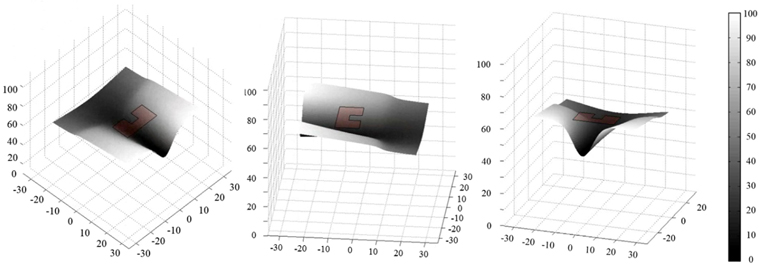
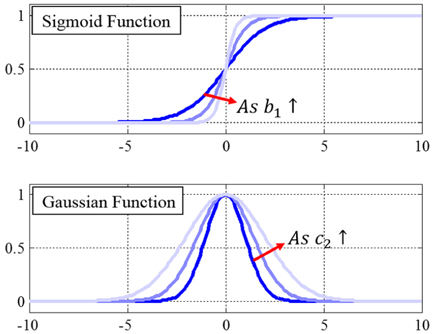
ĒżĒģÉņģ£ĒĢäļō£ļź╝ ĻĄ¼ņä▒ĒĢśļŖöļŹ░ ņé¼ņÜ®ļÉ£ ĒĢ┤ņäØĒĢ©ņłśļŖö ņŗ£ĻĘĖļ¬©ņØ┤ļō£ ĒĢ©ņłś, Ļ░ĆņÜ░ņŗ£ņĢł ĒĢ©ņłś, ņ¦üņäĀņØ┤ļŗż. Ļ░ü ĒĢ©ņłśņØś ņłśĒĢÖņĀü Ēæ£ĒśäņØĆ ņŗØ (5)~(7)ņŚÉ ņĀ£ņŗ£ļÉśņ¢┤ņ׳Ļ│Ā, ĒśĢņāüņØĆ Fig. 5ņŚÉ ņĀ£ņŗ£ļÉśņ¢┤ņ׳ļŗż. ņŗ£ĻĘĖļ¬©ņØ┤ļō£ ĒĢ©ņłśļŖö 0Ļ│╝ 1ņŚÉ ļ¼┤ĒĢ£Ē׳ Ļ░ĆĻ╣īņøīņ¦ĆļŖö ĒśĢĒā£ļź╝ Ļ░Ćņ¦ä ĒĢ©ņłśņØ┤ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö a1, c1ĒīīļØ╝ļ»ĖĒä░ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗ£ĻĘĖļ¬©ņØ┤ļō£ ĒĢ©ņłśņØś ņĄ£ļīĆ, ņĄ£ņåīĻ░ÆņØä ņĪ░ņĀłĒĢśĻ│Ā b1 ĒīīļØ╝ļ»ĖĒä░ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ļ│ĆĒÖöņ£©ņØä ņĪ░ņĀłĒĢśņśĆļŗż. Ļ░ĆņÜ░ņŗ£ņĢł ĒĢ©ņłśņØś Ļ▓ĮņÜ░, Ēæ£ņżĆĒÄĖņ░© c2 Ļ░ÆņØ┤ ņ”ØĻ░ĆĒĢśļ®┤ ļäōņØĆ ļ¬©ņ¢æņ£╝ļĪ£, Ļ░ÉņåīĒĢśļ®┤ ņóüņØĆļ¬©ņ¢æņØś ņĀĢĻĘ£ļČäĒż Ļ│ĪņäĀņØ┤ ņāØņä▒ļÉ£ļŗż. Fig. 6ņŚÉņä£ ņĀ£ņŗ£ĒĢśļŖö ĒżĒģÉņģ£ĒĢäļō£ļź╝ ņāØņä▒ĒĢśĻĖ░ņ£äĒĢśņŚ¼, ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØś ņóģļ░®Ē¢źņŚÉ ļīĆĒĢśņŚ¼ ļŗżļźĖĻ░ÆņØś Ēæ£ņżĆĒÄĖņ░©Ļ░ÆņØä ņé¼ņÜ®ĒĢśņśĆļŗż. ņĢ×ņä£ ņäżļ¬ģĒĢ£ ņŗ£ĻĘĖļ¬©ņØ┤ļō£ ĒĢ©ņłśļź╝ Ļ░ĆņÜ░ņŗ£ņĢłĒĢ©ņłśņØś Ēæ£ņżĆĒÄĖņ░©ļĪ£ ņé¼ņÜ®ĒĢśļ®┤, Fig. 5ņÖĆ Ļ░ÖņØ┤ ņŗ£ĻĘĖļ¬©ņØ┤ļō£ ĒĢ©ņłśĻ░ÆņØ┤ ļ│ĆĒÖöĒĢśļŖö ņśüņŚŁņŚÉņä£ ĒżĒģÉņģ£ ņ¢ĖļŹĢņØ┤ ņāØņä▒ļÉśĻ▓ī ļÉ£ļŗż. ļ¦łņ¦Ćļ¦ē ļŗ©Ļ│äļĪ£, ņäżĻ│äņŻ╝ņĢłņĀÉ 1)ņØä ļ¦īņĪ▒ņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ ņĀäņ▓┤ ĒżĒģÉņģ£ĒĢäļō£ņŚÉ ņŗØ (7)ņØä Ļ│▒ĒĢśņŚ¼ ļÅäĒé╣ņŖżĒģīņØ┤ņģśĻ│╝ņØś ņóģļ░®Ē¢źņśżņ░©Ļ░Ć Ļ░ÉņåīĒĢ©ņŚÉ ļö░ļØ╝ ĒżĒģÉņģ£ Ļ░ÆņØ┤ Ļ░ÉņåīĒĢśļÅäļĪØ ĻĄ¼ņä▒ĒĢśņśĆļŗż. ņĢ×ņä£ ņĀ£ņŗ£ĒĢ£ ņĀłņ░©ņŚÉ ļö░ļØ╝ ĻĄ¼ņä▒ļÉ£ ĒżĒģÉņģ£ĒĢäļō£ņØś ņłśĒĢÖņĀü Ēæ£ĒśäņØĆ ņŗØ (8)Ļ│╝ Ļ░Öļŗż. ņØ┤ļĢī, xd, yd ļŖö Ļ░üĻ░ü ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ļīĆĒĢ£ ĒÜĪļ░®Ē¢źņśżņ░©ņÖĆ ņóģļ░®Ē¢źņśżņ░©ļź╝ ņØśļ»ĖĒĢ£ļŗż. ĒżĒģÉņģ£ ĒĢäļō£ļź╝ ņāØņä▒ĒĢśļŖöļŹ░ ņé¼ņÜ®ļÉ£ ĒīīļØ╝ļ»ĖĒä░ļōżņØĆ ļ¼┤ņØĖņäĀļ░ĢņØś ļÅÖņŚŁĒĢÖņØ┤ļéś ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØś ĒśĢņāüņĀüņØĖ ņĀ£ņĢĮņĪ░Ļ▒┤ņØä Ļ│ĀļĀżĒĢśņŚ¼ ņŗ£Ē¢ēņ░®ņśżļ▓ĢņØä ĒåĄĒĢ┤ Ļ▓░ņĀĢĒĢśņśĆļŗż.


ĒżĒģÉņģ£ ĒĢäļō£ņØś ĻĄ¼ņä▒ņØ┤ ņÖäļŻīļÉśļ®┤, ņ£äņØś ņŗØ (9)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ļ¬®Ēæ£ ņäĀņłśĻ░ü(Ø£ōdesired)Ļ░ÆņØä Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗż. Fig. 7ņØĆ ņĢ×ņä£ ņäżļ¬ģĒĢ£ ņäĖ Ļ░Ćņ¦Ć ņ£ĀļÅäĻĖ░ļ▓Ģ(ņł£ņłśņČöņĀü, ņł£ņłś/ņĢ×ņä¼ņČöņĀü, ĒżĒģÉņģ£ĒĢäļō£)ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļ¼┤ņØĖņäĀņØś ņ£äņ╣śņŚÉ ļö░ļźĖ Ø£ōdesired Ļ░ÆņØä ļéśĒāĆļéĖ ĻĘĖļ”╝ņØ┤ļŗż. ĒżĒģÉņģ£ ĒĢäļō£ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ļ¼┤ņØĖņäĀļ░ĢņØä ņ£ĀļÅäĒĢĀ Ļ▓ĮņÜ░, ĒāĆ ņ£ĀļÅäĻĖ░ļ▓ĢļōżĻ│╝ļŖö ļŗ¼ļ”¼ ļÅäĒé╣ļČłĻ░Ć ņśüņŚŁņŚÉ ļ¼┤ņØĖņäĀļ░ĢņØ┤ ņ¦äņ×ģĒĢśļŖö Ļ▓āņØä ļ░®ņ¦ĆĒĢśļŖö ļ░®Ē¢źņ£╝ļĪ£ Ø£ōdesired Ļ░Ć ņāØņä▒ļÉśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
4. ļÅäĒé╣ņŗ£ļ«¼ļĀłņØ┤ņģś
ļ│Ė ņןņŚÉņä£ļŖö ņĢ×ņä£ ņĀ£ņŗ£ĒĢ£ Ļ│ĀņĀäņ£ĀļÅäļ▓Ģņ╣ÖĻ│╝ ĒżĒģÉņģ£ ĒĢäļō£ļź╝ ņØ┤ņÜ®ĒĢ£ ņ£ĀļÅäļ▓Ģņ╣ÖņØś ļ╣äĻĄÉļź╝ ĒåĄĒĢ┤ ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ ņĀ£ņŗ£ĒĢśļŖö ņ£ĀļÅäļ▓Ģņ╣ÖņØś ĒāĆļŗ╣ņä▒ņØä Ļ▓Ćņ”ØĒĢśņśĆļŗż. ņŗ£ļ«¼ļĀłņØ┤ņģśņŚÉ ņé¼ņÜ®ļÉ£ ņ£ĀļÅäļ▓Ģņ╣ÖņØĆ ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣Ö, ņł£ņłś/ņĢ×ņä¼ņČöņĀüņ£ĀļÅäļ▓Ģņ╣Ö, ĒżĒģÉņģ£ ĒĢäļō£ļź╝ ņØ┤ņÜ®ĒĢ£ ņ£ĀļÅäļ▓Ģņ╣ÖņØ┤Ļ│Ā, ņÖĖļ×ĆņØ┤ ņŚåļŖö ĒÖśĻ▓ĮņŚÉņä£ ļÅÖņØ╝ĒĢ£ ņĀ£ņ¢┤ĻĖ░ļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ļÅäĒé╣ņØä ņłśĒ¢ēĒĢśļŖö ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņ¦äĒ¢ēĒĢśņśĆļŗż. ņŗ£ļ«¼ļĀłņØ┤ņģśņāüņŚÉņä£ ņĄ£ņóģ ļ¬®Ēæ£ņĀÉņØĆ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØś ņżæņŗ¼ņĀÉņ£╝ļĪ£ ņĀĢņØśĒĢśņśĆĻ│Ā, Ļ░üĻ░üņØś ņ£ĀļÅäļ▓Ģņ╣ÖņØä ĒåĄĒĢ┤ ņĄ£ņóģņĀÉņØä ņČöņóģĒĢśļŖö ļ░®ņŗØņ£╝ļĪ£ ļ¼┤ņØĖņäĀļ░ĢņØä ņ£ĀļÅäĒĢśņśĆļŗż. ļ¼┤ņØĖņäĀļ░ĢņØś ļÅÖļĀźĒĢÖņØä Ļ│ĀļĀżĒĢśĻĖ░ņ£äĒĢ┤ ņäĀļ░ĢņØś ļ╣äņäĀĒśĢ ņĪ░ņóģņÜ┤ļÅÖļ░®ņĀĢņŗØļ¬©ļŹĖņØä ņé¼ņÜ®ĒĢśņśĆĻ│Ā, ļ¼┤ņØĖņäĀļ░ĢņØś ņÜ┤ĒĢŁņåŹļÅäļŖö 3ļģĖĒŖĖļĪ£ ņĀĢņØśĒĢśņśĆļŗż.
4.1 ļÅäĒé╣ ĻČżņĀü ļ╣äĻĄÉ
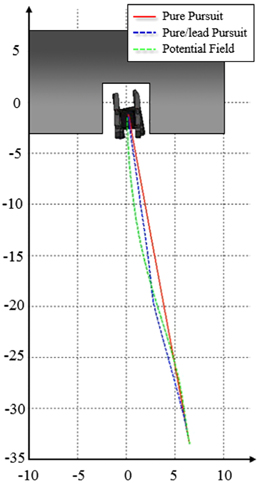
Fig. 8ņØĆ ļÅÖņØ╝ĒĢ£ ņ┤łĻĖ░ņĪ░Ļ▒┤ĒĢśņŚÉ ņäĖĻ░Ćņ¦Ć ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņØ┤ņÜ®ĒĢśņśĆņØä ļĢī, ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ĒåĄĒĢ┤ Ļ│äņé░ļÉ£ ļÅäĒé╣ĻČżņĀüņØä ļéśĒāĆļé┤Ļ│Ā ņ׳ļŗż. ņ┤łĻĖ░ ņ£äņ╣ś xd ņÖĆ yd ļŖö Ļ░üĻ░ü 7m, -33m ļĪ£ ņĀĢņØśĒĢśĻ│Ā, ņ┤łĻĖ░ņäĀņłśĻ░üņØĆ ņøÉņĀÉņØä ļ░öļØ╝ļ│┤ļŖö Ļ░üļÅä(11.9┬░)ļĪ£ ņĀĢņØśĒĢśņśĆļŗż. ĒżĒģÉņģ£ĒĢäļō£ļź╝ ņé¼ņÜ®ĒĢ£ Ļ▓ĮņÜ░, ĒÜĪļ░®Ē¢ź ņśżņ░©Ļ░ÆņØä ļÅäĒé╣ ņ┤łĻĖ░ļŗ©Ļ│äņŚÉ Ļ░Éņåīņŗ£ĒéżļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņŚłĻ│Ā, ņØ┤ ļĢīļ¼ĖņŚÉ ĒāĆ ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢ£ Ļ▓ĮņÜ░ņŚÉ ļ╣äĒĢ┤ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ļÅäņ░®ĒĢśņśĆņØä ļĢīņØś ņ×ģņé¼Ļ░üņØ┤ Ļ░ÉņåīĒĢśļŖö ĒśäņāüņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
4.2 ļ¬¼Ēģīņ╣┤ļź╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģś(Monte-carlo simulation)
Ļ░ü ņ£ĀļÅäļ▓Ģņ╣ÖņŚÉ ļīĆĒĢ£ ņä▒ļŖźņØä ņĀĢļ¤ēĒÖöĒĢśņŚ¼ ļ╣äĻĄÉĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ļÅäĒé╣ņŗ£ļéśļ”¼ņśżņŚÉ ļīĆĒĢ£ ļ¬¼Ēģīņ╣┤ļź╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ļ¬¼Ēģīņ╣┤ļź╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņŚÉņä£ļŖö ļ¼┤ņØĖņäĀļ░ĢņØś ņ┤łĻĖ░ņ£äņ╣śļź╝ ļ×£ļŹżļ│ĆņłśļĪ£ ņäżņĀĢĒĢśĻ│Ā, Ļ░üĻ░üņØś Ļ▓ĮņÜ░ņŚÉ ļīĆĒĢśņŚ¼ ļÅäĒé╣ņØä ņłśĒ¢ēĒĢśĻ│Ā, ĒÅēĻ░ĆĒĢśņśĆļŗż. ļ¼┤ņØĖņäĀļ░ĢņØś ņ┤łĻĖ░ņ£äņ╣śļŖö ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ļīĆĒĢ£ ļ░®ņ£äĻ░ü ļ▓öņ£ä(-45┬░~-135┬░)ļź╝ Ļ░¢ļŖö ĻĘĀļō▒ļČäĒżļĪ£ ņĀĢņØśĒĢśĻ│Ā, ļÅäĒé╣ņŖżĒģīņØ┤ņģśĻ│╝ ļ¼┤ņØĖņäĀļ░ĢĻ░äņØś Ļ▒░ļ”¼ļŖö ĒÅēĻĘĀ 35m, Ēæ£ņżĆĒÄĖņ░© 1mņØś ņĀĢĻĘ£ļČäĒżļź╝ Ļ░¢ļÅäļĪØ ņäżņĀĢĒĢśņśĆļŗż(Fig. 9(b)). ņŗ£ļ«¼ļĀłņØ┤ņģśņØś ņä▒ļŖźņ¦ĆņłśļĪ£ļŖö ļ¼┤ņØĖņäĀņØ┤ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ņĀæĻĘ╝ĒĢśņŚ¼ ņ▓½ ļ▓łņ¦ĖļĪ£ ņČ®ļÅīĒĢśļŖö ņł£Ļ░äņØś ņČ®ļÅīĻ░üĻ│╝ ĒÜĪļ░®Ē¢ź ņśżņ░©ļĪ£ ņĀĢņØśĒĢśņśĆļŗż(Fig. 9(a)).
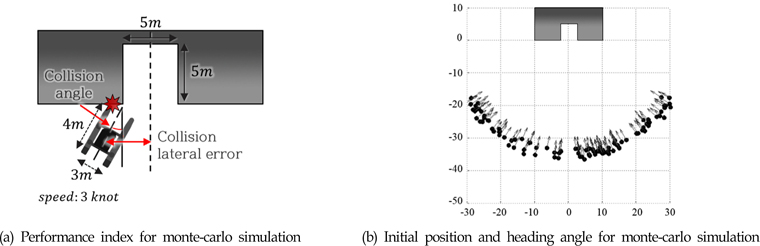
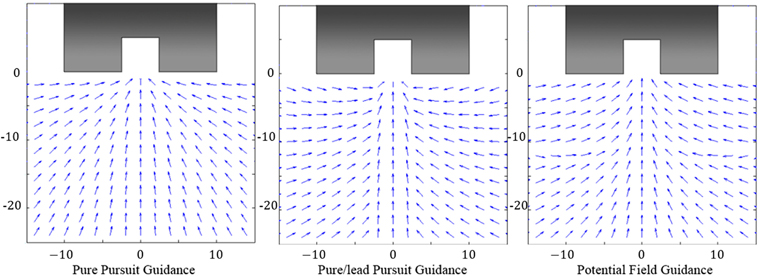
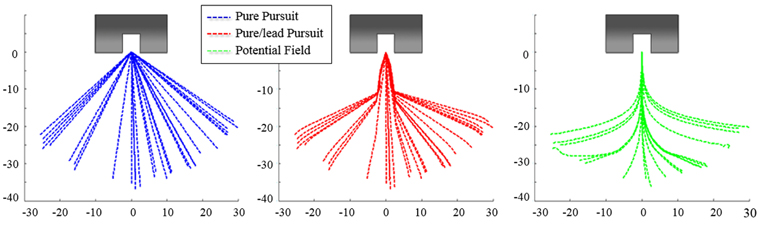
Fig. 10ņØĆ 100ļ▓łņØś ņŗ£ļ«¼ļĀłņØ┤ņģś ņżæ 20ļ▓łņØś ņŗ£ļ«¼ļĀłņØ┤ņģśņŚÉ ļīĆĒĢ£ ĻČżņĀüņØä ļéśĒāĆļéĖ ĻĘĖļלĒöäņØ┤ļŗż. ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢ£ Ļ▓ĮņÜ░, ņ┤łĻĖ░ĒÜĪļ░®Ē¢źņśżņ░©Ļ░Ć Ēü┤ Ļ▓ĮņÜ░ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ņ¦äņ×ģĒĢśļŖö ņ×ģņé¼Ļ░üņØ┤ ņĪ┤ņ×¼ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØś ņĖĪļ®┤ļČĆņŚÉ ņČ®ļÅīĒĢśļŖöĻ▓ĮņÜ░Ļ░Ć ļ░£ņāØĒĢ£ļŗż. ņł£ņłś/ņĢ×ņä¼ ņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢĀ Ļ▓ĮņÜ░ ņł£ņłśņČöņĀüņ£ĀļÅäļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢ£ Ļ▓ĮņÜ░ņŚÉ ļ╣äĒĢśņŚ¼ ļÅäĒé╣ņŖżĒģīņØ┤ņģśņŚÉ ņ¦äņ×ģĒĢśļŖö ņ×ģņé¼Ļ░üņØ┤ ĒśäņĀĆĒ׳ Ļ░ÉņåīĒĢśļŖö Ļ▓ĮĒ¢źņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņ£╝ļéś, ņĢ×ņä¼Ļ░üņØ┤ ļČłņŚ░ņåŹņĀüņ£╝ļĪ£ ļ│ĆĒĢ©ņŚÉ ļö░ļØ╝ ĻĖēĻ▓®ĒĢ£ ĻĖ░ļÅÖņØä ņłśĒ¢ēĒĢśĻ▓ī ļÉ£ļŗżļŖö ļŗ©ņĀÉņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ĒżĒģÉņģ£ĒĢäļō£ ĻĖ░ļ░ś ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢĀ Ļ▓ĮņÜ░, ņØ┤ļ¤¼ĒĢ£ ļČłņŚ░ņåŹņĀüņØĖ ĻĖ░ļÅÖņØ┤ ņØ╝ņ¢┤ļéśļŖö Ļ▓āņØä ļ░®ņ¦ĆĒĢĀ ņłś ņ׳ņ£╝ļ®░, ļÅäĒé╣ļŗ©Ļ│äņØś ņ┤łĻĖ░ņŚÉ ĒÜĪļ░®Ē¢źņśżņ░©ļź╝ Ļ░Éņåīņŗ£ĒéżļŖö ļ░®Ē¢źņ£╝ļĪ£ ļ¼┤ņØĖņäĀņØä ņ£ĀļÅäņŗ£Ēé┤ņ£╝ļĪ£ņŹ© ļÅäĒé╣ņØ┤ ļČłĻ░ĆļŖźĒĢ£ ņśüņŚŁņŚÉ ļ¼┤ņØĖņäĀļ░ĢņØ┤ ņ¦äņ×ģĒĢśņ¦Ć ļ¬╗ĒĢśļÅäļĪØ ĒĢśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
ņ┤Ø 100ļ▓łņØś ļ¬¼Ēģīņ╣┤ļź╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢ£ Ļ▓░Ļ│╝, Ļ░üĻ░üņØś ņ£ĀļÅäļ▓Ģņ╣ÖņŚÉ ļīĆĒĢ┤ Table 1Ļ│╝ Ļ░ÖņØĆ ņä▒ļŖźņ¦ĆņłśņØś RMS(Root mean square)Ļ░ÆņØä Ļ░¢ļŖö Ļ▓āņØä ĒÖĢņØĖĒĢśņśĆļŗż. ĒżĒģÉņģ£ĒĢäļō£ļź╝ ņØ┤ņÜ®ĒĢ£ Ļ▓ĮņÜ░ ĒāĆ ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢ£ Ļ▓ĮņÜ░ņŚÉ ļ╣äĒĢ┤ ĒśäņĀĆĒ׳ ļé«ņØĆ ņłśņżĆņØś ņČ®ļÅīĻ░üĻ│╝ ņČ®ļÅīĒÜĪļ░®Ē¢źņśżņ░©ļź╝ Ļ░¢ļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņŚłĻ│Ā, ņØ┤ļŖö Ļ│¦ ļÅäĒé╣ņØ┤ ļČłĻ░ĆļŖźĒĢ£ ņśüņŚŁņŚÉ ņĀæĻĘ╝ĒĢĀ ĒÖĢļźĀņØ┤ ĒāĆ ņ£ĀļÅäļ▓Ģņ╣ÖņŚÉ ļ╣äĒĢ┤ ļé«ņØĆ Ļ▓āņØä ņØśļ»ĖĒĢ£ļŗż.

ļ¼╝ļĪĀ, ĻĖ░ņĪ┤ņØś ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņØ┤ņÜ®ĒĢśļŹöļØ╝ļÅä ņĄ£ņóģņĀÉņŚÉ ļīĆĒĢ£ ļŗ©ņł£ ņČöņóģņĀ£ņ¢┤Ļ░Ć ņĢäļŗī Ļ▓Įņ£ĀņĀÉņŚÉ ļīĆĒĢ£ ņČöņóģņØ┤ļéś ļÅäĒé╣ļ░®Ē¢źņŚÉ ļīĆĒĢ£ ņĀĢļĀ¼(Alignment)ņØä ņłśĒ¢ēĒĢ©ņ£╝ļĪ£ņŹ© ļÅäĒé╣ņä▒Ļ│ĄļźĀņØä Ē¢źņāüņŗ£Ēé¼ ņłś ņ׳ļŖö Ļ▓āņØ┤ ņé¼ņŗżņØ┤ņ¦Ćļ¦ī, ĒżĒģÉņģ£ĒĢäļō£ĻĖ░ļ░ś ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņØ┤ņÜ®ĒĢĀ Ļ▓ĮņÜ░ ņČöĻ░ĆņĀüņØĖ ņĪ░Ļ▒┤ņØ┤ļéś ņśłņÖĖņ▓śļ”¼ ņŚåņØ┤ ĻĖ░ļ│Ėņ£ĀļÅäļ▓Ģņ╣Öļ¦īņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļÅäĒé╣ņØä ņłśĒ¢ēĒĢĀ ņłś ņ׳ņ£╝ļ»ĆļĪ£ ļÅäĒé╣ļŗ©Ļ│äļź╝ ņĄ£ļīĆĒĢ£ ļŗ©ņł£ĒÖöĒĢśļ®┤ņä£ ļÅäĒé╣ ņä▒Ļ│ĄļźĀņØä Ē¢źņāüņŗ£Ēé¼ ņłś ņ׳ļŗżļŖö ņןņĀÉņØ┤ ņ׳ļŗż. ļśÉĒĢ£, ĒāĆ ņ£ĀļÅäļ▓Ģņ╣ÖĻ│╝ ļ╣äĻĄÉĒĢśņŚ¼ ļ¼┤ņØĖņäĀļ░ĢņØś ļÅÖņŚŁĒĢÖņØ┤ļéś ļÅäĒé╣ņŖżĒģīņØ┤ņģśņØś ĒśĢņāüņŚÉ ļīĆĒĢ£ ņĪ░Ļ▒┤ņØä ĒżĒģÉņģ£ĒĢäļō£ ļé┤ņŚÉņä£ Ļ│ĀļĀżĒĢśņŚ¼ ņ£ĀļÅäļ¬ģļĀ╣ņØä ņāØņä▒ĒĢĀ ņłś ņ׳ļŗżļŖö ņןņĀÉņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż.
5. Ļ▓░ ļĪĀ
ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ļ¼┤ņØĖņäĀļ░ĢņØś ļÅäĒé╣ņØä ņ£äĒĢ£ ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņĀ£ņĢłĒĢśņśĆļŗż. ļ¼┤ņØĖņäĀļ░ĢņØś Ļ▓ĮņÜ░, ĻĄ¼ļÅÖĻĖ░Ļ░Ć ļČĆņĪ▒ĒĢ£ ņŗ£ņŖżĒģ£(Underactuated system)ņ×äĻ│╝ ļÅÖņŗ£ņŚÉ, ĒÜīņĀäļ░śĻ▓ĮņŚÉ ļīĆĒĢ£ ļ╣äĒÖĆļĪ£ļģĖļ»╣(Non-holonomic)ĒĢ£ ĻĄ¼ņåŹņĪ░Ļ▒┤ņØä Ļ░¢ļŖöļŹ░, ņØ┤ ļĢīļ¼ĖņŚÉ ļÅäĒé╣ņØ┤ ļČłĻ░ĆļŖźĒĢ£ ņśüņŚŁņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ ņĀ£ņŗ£ĒĢśļŖö ĒżĒģÉņģ£ĒĢäļō£ ĻĖ░ļ░ś ņ£ĀļÅäļ▓Ģņ╣ÖņØĆ ņØ┤ļ¤¼ĒĢ£ ļÅäĒé╣ņØ┤ ļČłĻ░ĆļŖźĒĢ£ ņśüņŚŁņ£╝ļĪ£ ļ¼┤ņØĖņäĀļ░ĢņØ┤ ņ£ĀļÅäļÉśņ¦Ć ņĢŖļÅäļĪØ ĒÜĪļ░®Ē¢ź ņśżņ░©ļź╝ ļÅäĒé╣ņØś ņ┤łĻĖ░ļŗ©Ļ│äņŚÉ Ļ░Éņåīņŗ£Ēé┤ņ£╝ļĪ£ņŹ© Ļ│ĀņĀä ņ£ĀļÅäļ▓Ģņ╣ÖņŚÉ ļ╣äĒĢ┤ ņĢłņĀäĒĢ£ ļÅäĒé╣ņä▒ļŖźņØä ĒÖĢļ│┤ĒĢśņśĆļŗż.
ļ│Ė ņŚ░ĻĄ¼ņÖĆ Ļ┤ĆļĀ©ĒĢśņŚ¼ Ē¢źĒøä Ļ│äĒÜŹņ£╝ļĪ£ ņĪ░ļźś ļ░Å ĒÆŹĒĢśņżæ ļō▒ņØś ĒÖśĻ▓Į ĒĢśņżæņØ┤ ņĪ┤ņ×¼ĒĢĀ ļĢī ņØ┤ļź╝ Ļ│ĀļĀżĒĢ£ ņ£ĀļÅäļ▓Ģņ╣ÖņØä ņäżĻ│äĒĢśļŖö ņŚ░ĻĄ¼, ņĄ£ņĀüĒÖö ĻĖ░ļ▓Ģ ļō▒ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒżĒģÉņģ£ĒĢäļō£ļź╝ ĻĄ¼ņä▒ĒĢśļŖöļŹ░ ņé¼ņÜ®ļÉśļŖö ĒīīļØ╝ļ»ĖĒä░ļź╝ ņ▓┤Ļ│äņĀüņ£╝ļĪ£ Ļ▓░ņĀĢĒĢśļŖö ņŚ░ĻĄ¼ļź╝ ņłśĒ¢ēĒĢĀ Ļ│äĒÜŹņØ┤ļŗż.




