1. 서 론
선박 운항 시 적용되는 안전에 관한 규정들의 만족 여부와 사고로 인한 손상 이후 안정성 확보에 대한 평가기술 개발이 관련 연구 분야에서 다양한 접근법으로 진행되고 있다. 이와 관련된 유체역학적 연구들 가운데, Papanikolau at al.(2000)이 손상으로 부분 침수된 Ro-Ro선의 파랑 중 전복(Capsizing) 상황에 대한 물리적 이해를 얻기 위해 수행한 모형시험 결과와 경험식과 포텐셜유동 기반의 수치해석 결과를 소개한 바 있다. 이후, Korkut et al.(2004)이 손상과 비손상 상태 Ro-Ro선의 파랑 중 운동응답에 대한 모형시험으로 연구하였으며, Lee et al.(2007) 역시, 손상된 Ro-Ro선의 파랑 중 운동특성을 이론적 시뮬레이션 방법과 모형시험으로 연구한 결과를 발표하였다. Cho et al.(2006)은 손상된 영역의 침수유동의 동역학적 특성을 조사하기 위한 모형시험과 CFD(Computational fluid dynamics) 해석을 수행하였으며, 비슷한 연구로서 Ruponen(2007)이 손상된 선체로 해수가 유입되는 과정에 대한 해석을 수행하고 모형시험과 비교한 연구결과를 발표하였다.
한편으로, 최근 적용되는 안전규정들 가운데, 승선 인원이 많은 여객선과 같은 선박의 경우 해상 사고로 선체 손상이 발생한 조건에서도 항구로 무사히 귀환할 수 있어야 한다는 규정들이 강화되고 있다. 이러한 안전귀항(Safe return to port, SRtP)규정에 관하여는 IMO(International Maritime Organization, 2009)에서 볼 수 있듯이 1914년 IMO에서 체결된 SOLAS(Safety of life at sea)의 강화된 규정으로 2010년 7월 이후 길이 120m 이상인 선박에 적용되고 있다. SRtP 규정은 사고와 안전귀항을 달성할 수 있는 선박의 시스템들을 검증하는 다양한 항목들을 설명하고 있다. 그러나 본 논문에서는 SRtP 규정에서 추진 시스템에 관련된 손상 선박의 파랑 중 안전귀항 선속을 유지할 수 있는 소요마력 추정에 관한 내용으로 제한하여 다루고자 한다. 이러한 관점에서 SRtP 규정은 선급별로 약간 다르게 적용되고 있다. 영국선급협회(Lloyd’s resister)에서는 “손상선박이 Beaufort 8의 해상조건에서 6노트(knot), 약 3.09m/s의 속도로 무사히 귀환할 수 있어야 한다(Lloyd’s register, 2010).”고 권고하고 있으며 독일선급협회(Germanischer Lioyd)은 “일반적인 기상조건(Normal weather)에서 7노트(3.6m/s) 선속 또는 설계속도의 절반에 준하는 속도로 무사히 회항할 수 있어야한다(Germanischer Lloyd, 2009).”라고 제시하고 있다. 최근, 이러한 SRtP 규정을 직접적으로 해석한 사례로는 Lim(2014)과 Espinoza Haro(2016)에 의한 모형시험과 CFD 해석 결과가 각각 발표된 바 있다. 대상 여객선은 측면 손상으로 선실이 부분 침수된 상황이며, 독일선급의 SRtP 규정에 따라 모형시험과 해석을 수행하여 손상 상태에서 침수구역의 내부유동, 추력 변화, 선체운동 변화 그리고 선속의 감속 정도를 추정하였다. 다만, 저자들의 연구에서 해상조건은 규칙파(Regular wave) 조건을 사용하였다.
본 논문은 기관 고장으로 좌현의 프로펠러가 작동하지 않는 쌍축 카페리선(Car ferry)을 대상으로 영국선급의 SRtP 규정에 대해 CFD해석을 수행한 연구결과를 소개하고 있다. 먼저, 논문은 SRtP 수치해석에 앞서 정수중 자항상태를 해석하고 선박해양플랜트연구소, KRISO(Korea Research Institute of Ships and Ocean Engineering)의 모형시험 결과와 비교하여 검증한 내용을 다루었다. SRtP 조건 수치해석은 Beaufort 8의 불규칙파 조건에서 단축 추진으로 자항중인 카페리 선박이 6노트(3.09m/s)의 속력을 내는데 필요한 실선 마력을 추정하였다. 여기서, 수치해석 결과는 네델란드 MARIN(Maritime Research Institute Netherlands)에서 수행한 모형시험 결과와 비교하고, 추정된 소요마력은 탑재된 엔진이 낼 수 있는 최대 마력과 비교하여 SRtP 선속 달성 여부를 검토하였다. 다음으로 기관실 침수 상황을 고려한 해석을 수행하고 침수가 발생하지 않는 조건과 비교하여 Beaufort 8의 파랑 중 6노트(3.09m/s)의 선속을 유지하는데 소요되는 마력 증가량에 대해 논의하였다.
2. 수치 해석 방법
2.1 지배방정식 및 난류모형
파랑 중 카페리 선박 주위 유동 해석은 범용프로그램 STAR-CCM+(Siemens, 2018)를 이용하여 수행하였다. 선체 주위 유동은 완전히 발달된 비압축성 난류유동(Incompressible turbulent flow)으로 가정하고 지배방정식으로 연속 방정식과 운동량 보존방정식인 RANS(Reynolds averaged navier-stokes) 방정식을 사용하였다. 지배방정식은 유한체적법(Finite volume method)으로 이산화하여 그 해를 구한다. 여기서, 지배방정식의 시간 적분 및 공간에 대한 이산화에는 2차 정확도의 기법이 사용되었다. 비압축성 유동 해석에서 유체의 속도와 압력을 연성하는 방법으로 SIMPLE(Semi-Implicit method for pressure-linked equation) 방법을 선택하였다.
난류모형은 선박의 저항과 자항성능 해석에서 모형시험 결과와 비교하여 비교적 만족스러운 좋은 일치를 보여주는 Realizable k-∊ 모형을 벽면함수(Wall function) 기법과 함께 사용하였다.
2.2 프로펠러 모델링
카페리 선박의 프로펠러는 형상을 직접 모델링하지 않고 프로펠러의 직경을 가지는 두께가 일정한 원판이 주어진 전진비(Advance ratio)에서 추력과 토오크를 내는 방법으로 고려하였다. 이는 Virtual disk법으로 불리는 수치기법으로 STAR-CCM+에서 제공하고 있으며, 이때 입력으로 필요한 전진비(Advance ratio)에 따른 추력과 토오크의 프로펠러 단독성능 곡선(Propeller open water curve)은 KRISO에서 수행한 모형시험 결과를 사용하였다. 프로펠러의 추력과 토오크는 Virtual disk내에서 다음과 같은 방식으로 표현되는 체적력(Body-force) 분포를 통해 지배방정식에서 고려된다.
여기서, fbx 와 fbθ는 축방향과 원주방향 체적력 성분을 나타내고, r은 반경방향 좌표, 그리고 RH는 프로펠러 허브반경, 그리고 RP는 프로펠러의 반경을 나타낸다. 식 (1)과 식 (2)에서 상수 Ax 와 Aθ는 다음과 같이 정의된다.
여기서, T와 Q는 각각 프로펠러의 추력과 토오크를 나타내고 ∆는 Virtual disk의 두께를 나타낸다.
2.3 불규칙파 생성
카페리 선박으로 입사되는 파와 선체의 운동으로 발생하는 자유수면상의 파는 2차 정도의 VOF(Volume of fluid)법을 선택하여 해석하였다(Muzaferija et al., 1998). 불규칙파는 유의파고(Significant wave height)와 파의 첨두주기(Peak wave period) 그리고 바람의 속도를 입력으로 하는 STAR-CCM+에서 제공하는 JONSWAP(Joint North Sea wave project) 스펙트럼으로 생성하였다(Siemens, 2018). 이때, 불규칙파는 선형파(Linear wave)들의 중첩으로 가정하고 계산영역(Computational domain)의 유입 경계면에서 VOF 값으로 표현되는 파고와 파에 의한 유속 성분들을 입력하여 생성한다.
3. 수치 해석 결과
3.1 대상 카페리선 및 프로펠러
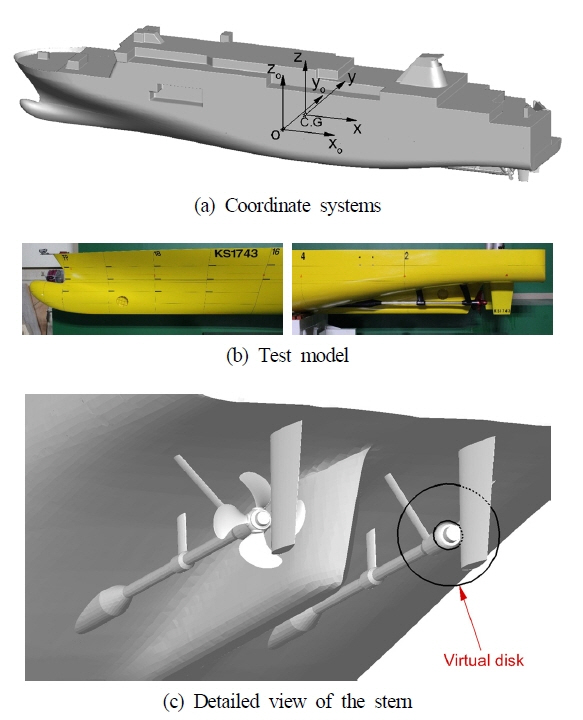
본 논문에서 대상 선박은 길이 148m, 폭 24.8m인 쌍축 선형의 카페리선이다. 실선과 모형선의 주요 제원은 Table 1에서 볼 수 있으며, Fig. 1에서는 수치해석에서 사용한 정수중 선체 중앙에 놓인 기본 좌표계(xo, yo, zo)와 선체 운동 해석을 위한 무게중심(Center of gravity) 좌표계(x, y, z) 그리고 선체의 형상을 보여주고 있다. Fig. 1(b)는 KRISO 모형시험에서 사용된 상부 구조물이 없이 제작된 모형선의 모습을 보여주고 있으며, Fig. 1(c)는 회전축, I형 및 V형 스트럿(Strut) 그리고 타를 포함한 대상 카페리선의 선미를 보여주고 있다. 좌현 기관의 손상으로 좌현 프로펠러는 회전하지 않는 고정된 조건으로 격자계를 생성하고 수치해석에 직접 반영하고, 우현의 프로펠러는 앞서 2장에서 설명한 Virtual disk 모델로 해석하였다.
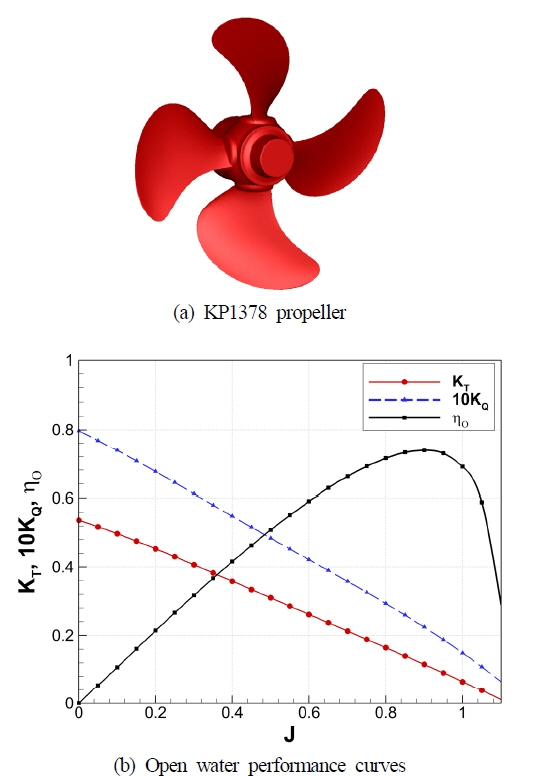
Fig. 2는 대상 카페리선의 정수중 및 파랑 중 자항성능 모형 시험에 사용된 KRISO KP1378 프로펠러의 형상과 Virtual disk모델의 입력정보가 되는 모형시험에서 얻은 대상 프로펠러의 추력계수 KT, 토오크계수 KQ 그리고 프로펠러 단독효율 ηo로 나타낸 단독성능 곡선을 보여주고 있다.
3.2 계산영역 및 격자계
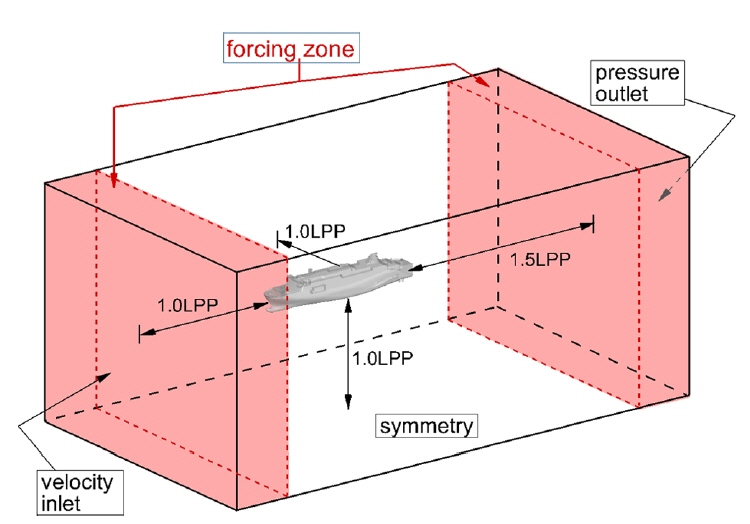
Fig. 3은 카페리 선박의 파랑 중 자항성능 해석에 사용된 계산영역과 경계조건을 설명하고 있다. 계산영역은 선체 상류 방향으로 1.0Lpp, 선체 하류로 2.0Lpp, 선체에서 좌우 영역 각각 1.0Lpp 그리고 계산영역의 바닥까지 1.0Lpp의 거리를 가진다. 계산영역의 상류 경계면에서는 속도유입(Velocity inlet) 조건, 하류 경계면에서는 압력유출(Pressure outlet)조건 그리고 벽면(Solid wall)조건을 가지는 선체를 제외한 나머지 경계면들에서는 대칭면(Symmetry plan) 조건을 사용하였다.
한편, 입사파의 선체에 의한 산란과 선체의 운동에 의한 방사파들의 상호작용 영향으로 계산영역의 경계에 특별한 수치해석 처리를 하지 않는 경우 반사파가 발생할 수 있다. 본 논문에서는 사용된 프로그램에서 제공하는 Forcing법이라 불리는 방법으로 Fig. 3에 보이는 Forcing 영역에서 CFD로 구한 파고와 유동의 운동량을 cos2 분포함수로 주어진 해석해와 조화시켜 반사파를 효율적으로 제거하는 접근법을 사용하였다.
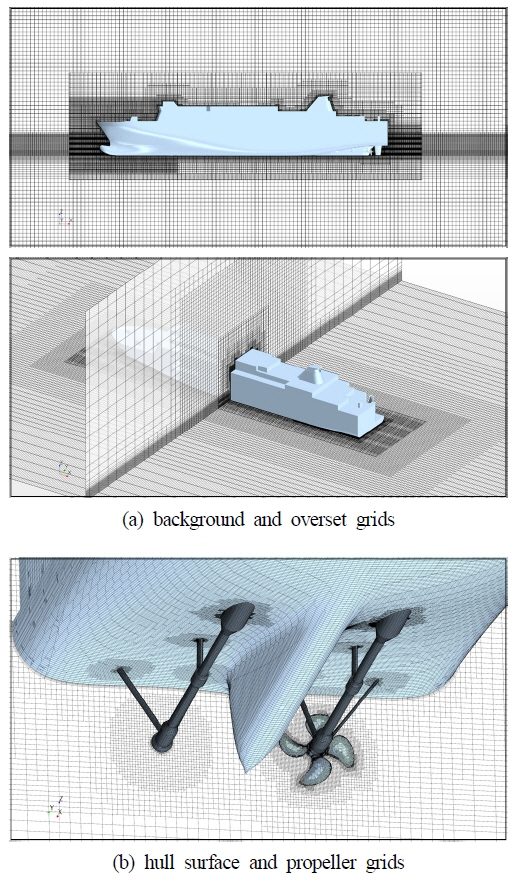
Fig. 4(a)는 카페리선 주위에 생성된 격자 분포의 모습을 보여주고 있다. 수치 격자계는 Kim et al.(2018)의 2차원 Stokes 5차파와 파랑 중 FPSO(Floating production storage offloading) 운동해석에서 사용된 다양한 규모의 격자계에 대한 해의 민감도 연구결과를 참조하여 생성하였다. Kim et al.(2018)은 다양한 파주파수 조건에서 파장당 그리고 파고당 격자수 변화에 따른 수치해석 결과를 통해 파고당 15~20개, 파장당 95개 이상의 격자를 사용할 때 수치감쇠가 적은 만족할만한 해석결과를 얻을 수 있다고 보고하였다. 본 논문은 주어진 해상조건인 Beaufort 8의 유의파고와 평균영점교차주기(Zero-up crossing period)에 해당하는 파장에 대해 각각 약 20개와 98개의 격자 요소가 들어가도록 하였다. 이때 선체와 함께 운동하는 격자계는 약 300만개 그리고 고정된 배경 격자계는 250만개의 격자요소가 사용되어 총격자수는 약 550만개이다. 격자계 생성은 Trimmer라 불리는 직육면체 격자요소를 기반으로 하는 비정렬 격자(Unstructured grid) 생성법을 사용하였다. 벽면 근방 경계층 영역은 Prism layer라 불리는 격자요소를 5개 적층하여 사용하고, 벽면에서 첫 격자요소의 계산점까지의 무차원 거리인 y+값은 50정도가 되도록 하였다. Fig. 4(b)는 선미 선체 표면격자 분포와 직접 격자로 표현된 회전하지 않고 고정된 좌현 프로펠러를 보여주고 있다. 그림에서 우현 프로펠러의 직경과 두께 그리고 허브직경을 가지는 Virtual disk가 위치한 영역의 격자분포 모습을 보여주고 있다. 정수중 수치해석 실험을 통해 두께 방향으로 약 4개 이상의 격자를 분포시킬 때 해석의 결과는 큰 차이가 없었다.
3.3 정수중 자항성능 검증
본 절에서는 프로펠러를 모델링한 Virtual disk법을 적용한 대상 카페리선의 자항성능 해석 정확도를 검증하기 위해 정수중 비손상 상태와 앞서 설명한 손상 상태의 KRISO 모형시험 결과와 비교, 검토한 사항을 소개한다. 계획흘수(Design draft) 5.5m 조건의 비손상 상태의 수치해석은 선체 중앙을 대칭조건으로 두고 선체의 우현 영역만을 해석하였다. 이때 실선 선속 VS는 15노트(7.72m/s), 19노트(9.77m/s) 그리고 23노트(11.83)를 해석하였다. 손상 상태는 만재흘수(Scantling draft) 5.8m와 SRtP 조건의 선속인 6노트(3.09m/s)에서 좌현 프로펠러는 고정하고 우현 프로펠러는 Virtual disk법으로 해석하여 자항상태를 해석하였다. 이때, 예인력 FD를 고려하였으며 다음과 같다.
여기서, CFM과 CFS는 각각 모형선과 실선의 마찰저항계수를 나타내고, CA는 각 선형시험수조(Towing tank)들이 가지는 고유값인 상관관계(Correlation allowance) 계수이다. 본 논문에서 사용된 CA는 0.00015이며 KRISO 선형시험수조의 값을 사용하였다.
Table 2는 비손상 상태 자항성능 해석결과에서 주어진 선속을 내는데 필요한 프로펠러의 추력 TM, 토오크 QM 그리고 회전수 NM을 KRISO의 모형시험 결과와 비교하고 있다. 계산한 선속들에서 프로펠러의 회전수는 약 5%정도 높게 수치해석에서 추정되었지만, 추력과 토오크는 약 2%내에서 모형시험과 만족스러운 일치를 보여주고 있다. 본 논문에서 적용한 Virtual disk법이 비교적 만족스러운 일치를 보이는 이유는 Fig. 1(b)에서 볼 수 있듯이 대상 카페리선의 개방된 회전축 방식의 추진 시스템의 채택으로 인하여 선미 유동이 일반적인 단축(Single skeg) 선미의 상선들이 보이는 높은 반류(Wake)에서 작용하는 프로펠러 유동과는 다른 특징 때문으로 사료된다. 대상 카페리선의 반류의 경우 선체에 의한 교란이 상대적으로 적기 때문에 Virtual disk법의 적용으로 모형시험과 유사한 결과를 얻을 수 있는 조건으로 판단된다.
Table 3은 정수중 좌현의 프로펠러가 고정된 손상 상태에서 선속 6노트(3.09m/s)를 내는데 소요되는 모형선 우현 프로펠러의 추력과 토오크를 비교하고 있다. 이 경우 회전수는 모형시험과 약 7.3%로 비손상 상태보다는 약간 더 차이가 나고, 추력은 약 4.5% 그리고 토오크는 1.7%의 차이를 보였다. 결론적으로, Virtual disk법을 본 수치해석 문제에 적용한 결과 회전수의 차이가 약간 있으나, 힘의 추정에 있어 비교적 타당한 정도의 결과를 제공하고 있어, 파랑 중 자항조건 해석에서도 타당한 결과를 얻을 수 있을 것으로 사료된다.
3.4 파랑 중 비침수 상태 해석
본 절에서는 Table 4에 나타낸 유의파고 H1/3, 첨두주기 TP 그리고 바람의 속력 Vwind에 대한 Beaufort 8의 불규칙파 조건에서 SRtP 선속 6노트(3.09m/s)를 유지하는데 필요한 프로펠러의 추력을 해석한 결과를 소개한다. 본 연구에서는 조우각도(Encounter angle) 180도의 선수파(Head sea) 조건만을 고려하였으며, 선속으로 파의 상도속도가 고려되어 계산영역의 유입조건으로 고려되고 이때 주어진 첨두주기에 따른 조우주기는 약 1.71s이다. 파랑 중 자항해석에서 힘들은 이동평균(Running mean) 값들을 사용하고 정수중 해석과 같이 예인력을 고려하였다. 선체의 운동은 상하동요(Heave), 횡동요(Roll) 그리고 종동요(Pitch)의 3자유도 운동을 고려하였으며, 계산 시간 간격(Computational time step)은 주어진 불규칙파 첨두주기를 418등분하는 0.005s를 사용하였다. 이는 주어진 첨두주기 조건을 규칙파로 표현하고 카페리선속을 고려하여 계산된 CFL(Courant-Friedrichs_Lewy condition)수 약 0.29에 해당하는 값이다.
CFD해석에서 불규칙파 시뮬레이션의 전체 시간에 관련해서, 일반적으로 선체의 운동과 파와의 상대운동에 따른 동적 영향(Dynamic effect)들을 면밀히 살펴보는 연구에서 통계 해석적으로 유효하기 위해 상대적으로 긴 시간의 해석시간이 필요하다. 그러나, 본 논문은 앞서 설명한 바와 같이 SRtP 선속 6노트(3.09m/s)에 대한 불규칙 파랑 중 부가저항들에 의한 대략적인 소요마력 추정 해석에 주안점을 두고 있어 힘의 평균 변동이 크지 않는 시점까지 상대적으로 짧은 시뮬레이션 시간을 설정하였다. 자항점을 찾기 위해 수치해석은 두 조건의 프로펠러 회전수에 대해 80s 동안의 시뮬레이션을 각각 수행하고, 이들의 결과를 바탕으로 내삽을 통해 자항점을 찾은 후 최종 자항점에 대해 120s를 더 이어서 수행하였다.
MARIN의 모형시험은 KRISO의 정수중 자항시험과 본 수치해석 수행 이후 수행되었으며, 조파기가 설치된 250m×10.5m×5.5m 규모의 감압수조(Depressurized wave basin)에서 수행되었다. 실해역 1시간 불규칙파를 재현하기 위해 주어진 선속 6노트(3.09m/s)에 대해 한 번 수행할 때 약 259s인 모형시험을 3번 수행하고 최종적으로 이들 전체 데이터를 합쳐서 후처리하였다. 여기서, MARIN의 모형시험은 선체의 상하동요와 종동요를 고려하였으며, 공기저항은 공기에 노출된 카페리선의 상부 구조물의 전면부 면적(Frontal area)과 항력계수 0.7의 값을 사용한 경험식으로 계산하여 반영하였다. 최종모형시험의 주요한 결과는 SRtP 선속 6노트(3.09m/s)를 내는데 필요한 프로펠러의 실선 평균 추력 추정값이다.
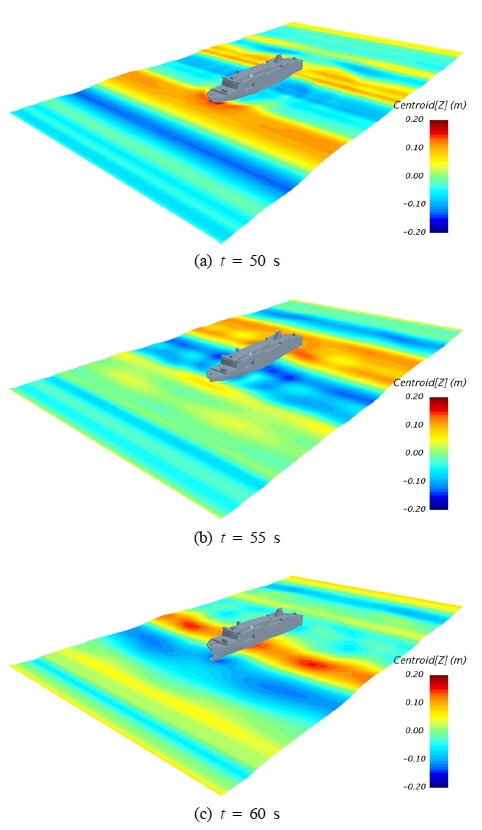
Fig. 6은 시뮬레이션 시간 50s, 55s 그리고 60s에서 파의 상태와 선체의 자세 변화의 상황을 보여주고 있다. 그림에서 Fig. 6의 (a), (b)와 (c)는 각각 상대적으로 높은 파고의 파가 선수와 선미 그리고 선체 중앙을 통과할 때 선체와 파의 상호작용으로 인한 선체 주위 파형의 변화와 선체의 운동 변화를 보여주고 있다.
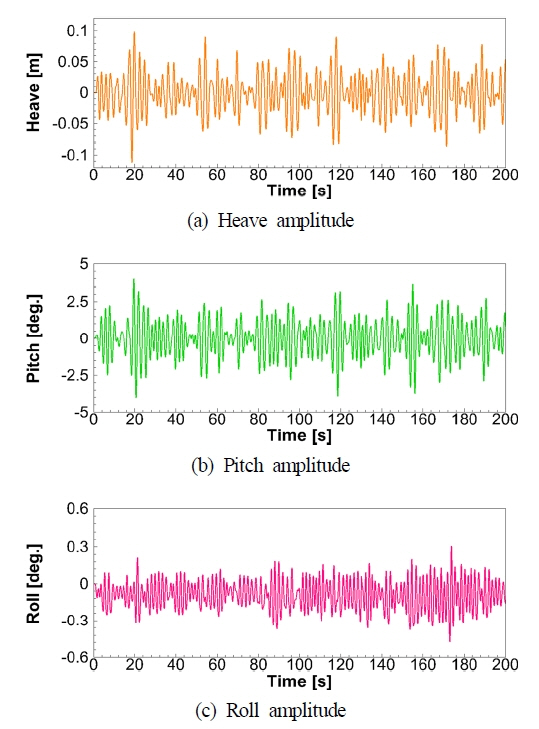
Fig. 7과 Fig. 8는 자항점 이전 프로펠러 회전수에서 80s와 이후 200s까지 자항점에서 120s 동안의 선체의 저항, 프로펠러 추력, 토오크 그리고 선체의 운동 변화를 보여주고 있다. 힘과 운동들은 파의 주기로 응답하고 있으며, 대체로 저항과 프로펠러의 힘 그리고 상하동요와 종동요의 진폭의 변화는 시간에 대해 서로 유사한 거동을 보이고 있다. 프로펠러 추력의 이동평균 값이 약 50s 이후 비슷하여 이 시점 이후의 값을 평균으로 사용하였다. 수치해석에서 고려한 카페리선의 횡동요 운동의 진폭은 0.4도 이내로 크지 않으며, 기관 손상으로 고정된 좌현 프로펠러로 인한 비대칭 유동의 결과로 선체가 우현으로 약간 경사가 발생한 것을 볼 수 있다. 이는 고정된 좌현 프로펠러 주위가 유속의 느려짐과 함께 압력이 높고, 우현의 경우 프로펠러의 작동으로 유속이 빨라져 압력이 상대적으로 낮아진 원인으로 사료된다.
Table 5는 MARIN의 모형시험에서 제공하는 실선에 대한 상하동요와 종동요 운동의 1/3 유의운동진폭(Significant amplitude, SA)과 SRtP 선속 6노트(3.09m/s)를 내는데 필요한 프로펠러의 실선 평균 추력 추정값을 비교하고 있다. 여기서, Ts는 설계단계에서 결정한 엔진에서 얻을 수 있는 프로펠러의 최대 추력을 나타낸다. 결과에서 상하동요의 경우 약 0.24m의 약간의 차이를 보이고 종동요의 경우는 0.08도 정도의 작은 차이를 나타내고 있다. 계산된 실선 평균 추력의 경우 정수중 자항상태보다는 차이가 큰, 약 9.7% 정도의 차이로 약간 낮게 예측하고 있다. 수치해석은 완전히 발달된 난류유동을 가정하고 있지만, MARIN의 언급처럼 10노트(5.14m/s) 이하 낮은 선속의 경우 모형시험의 유동은 층류의 영향이 무시될 수 없는 상황이 되는 차이가 결과에 어느 정도 반영된 것으로 판단된다. 그러나 보다 주요한 차이는 수치해석에서 사용한 프로펠러 모델링으로 사료된다. 파랑 중 선체의 자세 변화에 따른 프로펠러로 유입되는 유동으로 인한 실제 추력은 Virtual disk법으로 이상적인 하중분포로 처리한 결과와 다소 다를 것으로 추측된다.
그러나, 본 수치해석 결과를 살펴볼 때 불규칙 파랑 중 SRtP 선속 6노트(3.09m/s)를 유지하는 필요한 대략적인 소요마력 추정에 Virtual disk법을 이용한 CFD 기법의 적용으로 비교적 타당한 결과를 얻을 수 있음을 알 수 있다. 한편, 표에서 언급한 한 기의 엔진에서 가용할 수 있는 프로펠러 최대 추력 Tmax가 746kN으로 모형시험과 수치해석에서 추정된 추력보다 여유가 있는 것을 알 수 있다. 이는 결론적으로 Beaufort 8의 불규칙파 조건에서 단축 추진으로 자항중인 대상 카페리 선박이 6노트(3.09m/s)의 속력을 내는 데는 문제가 없는 것으로 판단된다.
3.5 파랑 중 침수 상태 해석
본 절에서는 대상 카페리선의 기관 손상이 있는 좌현 엔진이 탑재된 기관실 침수 상황을 가정하고 침수가 발생하지 않는 조건과 비교하여 Beaufort 8의 파랑 중 6노트(3.09m/s)의 선속을 유지하는데 소요되는 마력 증가량에 대해 논의하였다. 여기서, 침수로 인한 선체 내부 질량의 시간변화는 운동방정식 관성력 항의 질량에 직접 더하여 고려하지 않고, 침수 유동의 운동으로 발생하는 시간에 따른 정적 및 동적 힘과 모멘트의 변화를 운동방정식의 우변 항에 고려하여 그 영향을 해석하였다.
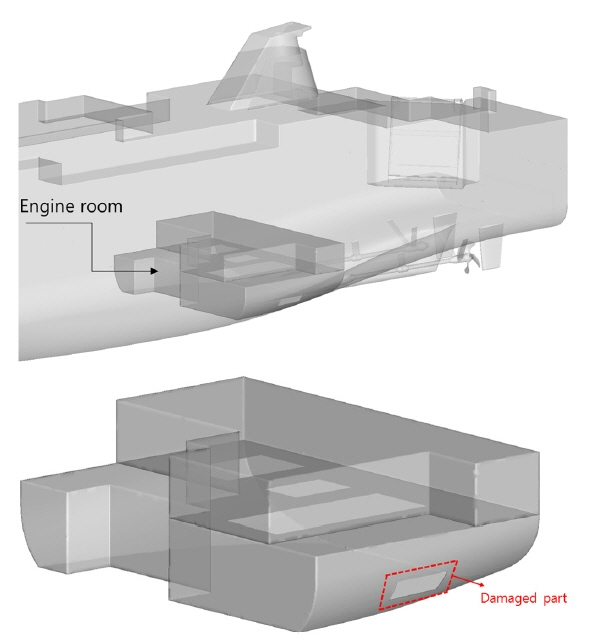
Fig. 9은 아래와 위 공간이 개방되어있는 복층 구조의 기관실의 형상과 침수가 발생하는 수면 아래 기관실의 좌현 쪽 벽에 실선 기준의 3.8m×1.0m의 손상 영역을 보여주고 있다. 좌현 엔진이 탑재되는 그림의 기관실은 좌우 비대칭으로 우현의 엔진에서 나온 회전축이 지나는 영역이며, 수치해석에서 기관실 내부의 다른 구조물은 없는 빈 상태로 가정하였다. 침수는 시뮬레이션 시작과 동시에 발생하는 것으로 설정하였다. 수치해석은 계산시간 초기 약 30s까지 기관실 침수가 발생하는 것을 확인하였으며, 이때 침수된 구간의 배수량은 대상 카페리선의 전체 배수량의 약 5.9%에 해당하였다.
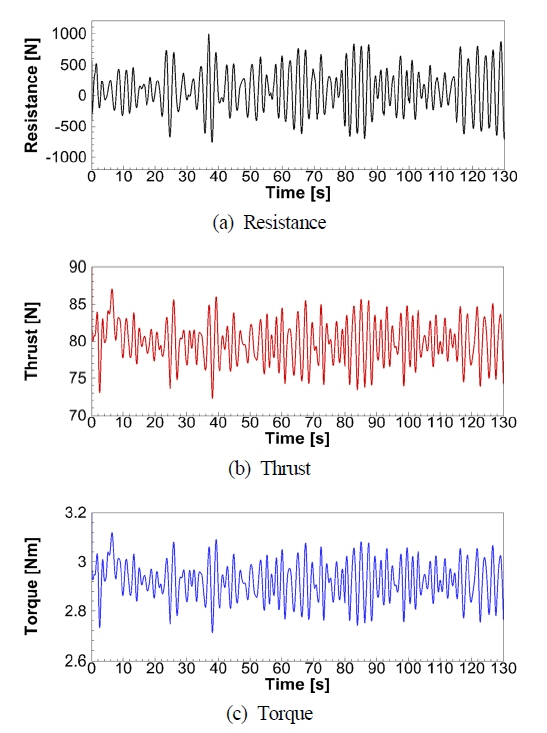
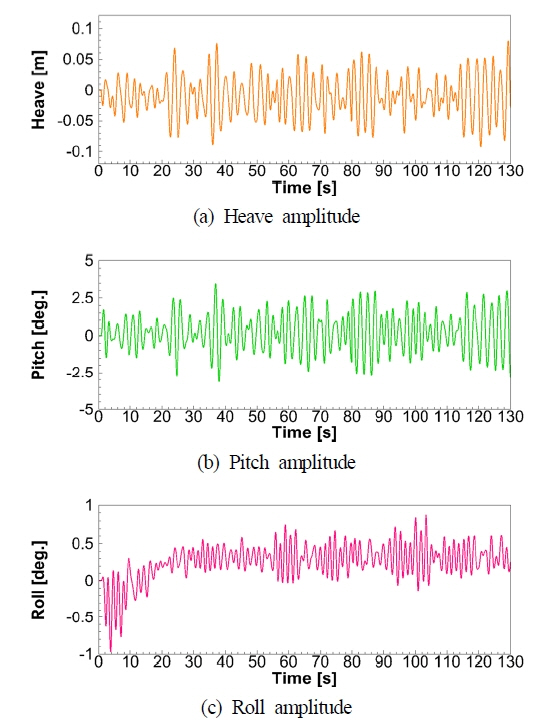
Fig. 10과 Fig. 11는 침수 상황에서 찾은 자항점에서 계산한 130s 동안의 파의 진동수로 응답하는 선체의 저항, 프로펠러 추력, 토오크 그리고 선체의 운동 변화를 보여주고 있다. 기관실 침수는 초기 약 30s 동안 발생하고, 이 시간 동안 침수 유동의 영향으로 선체는 우현으로 경사진 상태에서 횡동요가 발생하는 것을 볼 수 있다. 이 시간 이후, 침수된 기관실의 좌우 비대칭의 영향으로 선체가 좌현으로 약간 경사진 상태로 횡동요 운동이 변하는 것을 볼 수 있다. 운동 변위의 시간 변화를 앞선 비침수 상태와 비교할 때 침수된 기관실 내 슬로싱(Sloshing) 문제는 크지 않은 것으로 판단된다. 상하동요의 경우 선미 기관실의 침수로 인한 선미 침하 상태에서 운동이 발생하는 것을 예상할 수 있다. 전체적으로 저항과 추력 그리고 토오크는 비침수 조건보다 값이 커진 것을 볼 수 있다.
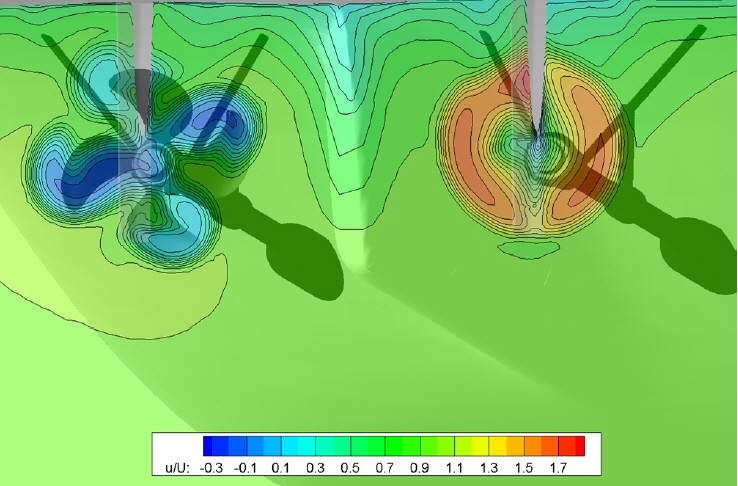
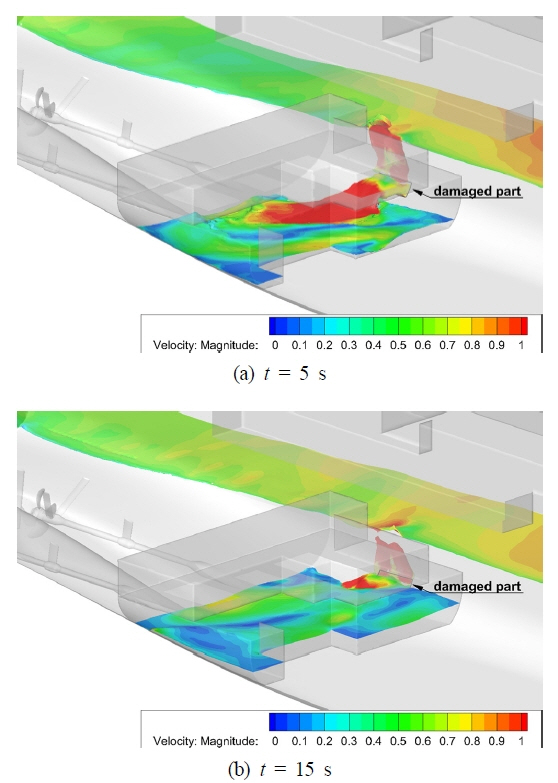
Fig. 12은 시간 5s와 15s에서 침수가 발생하고 있는 기관실 내부 유동의 변화를 보여주고 있다. 그림의 색의 분포는 유속의 크기를 나타내고 있으며, 우현에서 선미를 바라보는 시점에서 기관실 벽 손상부위로 내부의 공기가 유출되는 것과 동시에 외부의 물이 유입되고 있고 선체의 운동과 함께 내부에서 약한 슬로싱이 발생하는 것을 보여준다. 유속의 크기는 침수가 발생하는 기관실 벽면 손상부위를 통과하는 유동에서 상대적으로 큰 것을 볼 수 있다.
Table 6은 기관실 침수 유무에 따른 Beaufort 8의 불규칙파 조건에서 해석된 모형 프로펠러 회전수, 저항, 추력, 토오크, 실선 추력 그리고 다음의 식 (9)와 같이 모형 프로펠러의 토오크로 추정한 실선 제동마력(Brake horse power, BHPS)를 비교하고 있다.
여기서, ρS는 실선의 밀도, ρM은 모형선의 밀도 그리고 λ는 모형선과 실선의 축척비를 나타낸다.
기관실 침수의 영향으로 모든 값이 증가하였으며, 추정된 실선 추력의 경우 약 9.5% 증가하였고, 제동마력은 약 15% 증가하였다. 기관실 침수로 인해 증가된 소요마력을 표 아래쪽에 표기한 한 기의 추진기의 가용 최대 추력 및 제동마력과 비교했을 때, 이 값들은 약 70%에 해당하며 약 30%의 여유 마력이 있는 것을 알 수 있다. 그러므로 본 논문에서 설정한 기관실 침수 상황이 발생하여도 대상 카페리선은 Beaufort 8의 불규칙파 조건에서 단축 추진으로 6노트(3.09m/s)의 속력을 내는 데는 문제가 없는 것으로 판단된다.
4. 결 론
본 논문에서는 대상 카페리선의 좌현 기관의 고장으로 프로펠러가 고정된 상황에서 우현의 단축 추진만으로 Beaufort 8의 불규칙파 해상조건에서 6노트(3.09m/s)의 선속을 유지하는데 소요되는 마력을 CFD로 해석한 연구결과를 소개하였다.
파랑 중 선체운동과 함께 해석해야할 프로펠러 문제는 Virtual disk법으로 단순화하였으며, 정수중 자항상태에 대한 KRISO 모형시험 결과를 통해 비손상 및 손상 조건에 대해 검증하였다. 여기서, 프로펠러 추력 추정 관점에서 수치해석 결과는 모형시험과 만족할만한 좋은 일치를 보여주었다.
기관실 비침수 조건에서 SRtP에 대한 수치해석 결과에서 불규칙파의 진동수로 응답하는 저항과 프로펠러의 힘 그리고 상하동요와 종동요의 진폭의 변화는 대체로 유사한 거동을 보였다. MARIN의 모형시험 결과와의 비교에서 운동응답의 경우 비교적 타당한 일치를 보여주었다. 실선 평균 추력의 경우 모형시험보다 수치해석이 약간 낮게 추정하였으나, 주어진 엔진의 가용 최대 추력 대비 Beaufort 8의 해상조건에서 6노트(3.09m/s) 선속을 내는데 필요한 추력 추정에 CFD기법이 비교적 만족스러운 결과를 제공하고 유용한 것을 확인하였다.
마지막으로 대상 카페리선 배수량의 약 5.9%에 해당하는 좌현 엔진이 탑재된 기관실의 침수가 발생했을 때 비침수 조건 대비 6노트(3.09m/s) 선속을 유지하는 데 필요한 실선 추력의 경우 약 9.5% 증가하였고, 토오크로 계산된 제동마력은 약 15% 증가하는 것으로 계산되었다. 이때, 기관실 침수로 인해 증가된 소요마력은 주어진 추진기의 가용 최대 추력 및 제동마력과 비교했을 때 이 값들은 약 70%에 해당하며 약 30%의 여유 마력이 있는 것으로 해석되었다. 결론적으로, 본 논문에서 설정한 기관실 침수 상황이 발생하여도 대상 카페리선은 Beaufort 8의 불규칙파 조건에서 단축 추진으로 6노트(3.09m/s)의 속력을 내는 데는 문제가 없는 것으로 확인되었다.
향후, 다양한 선체 손상 상황에서 대상 선박이 SRtP조건을 만족하는 여부와 파라중 직진 항주에 대한 조종성능 연구가 진행되어야 할 것으로 사료된다.