



1. 서 론
심해역 해양자원의 개발 추세와 함께 라이저의 적용 수심은 점점 깊어지고 있다 . 심해역에 설치되는 라이저는 높은 압력 등 열악한 환경에 노출되기 쉽다 . 카티너리 라이저 (Steel Catenary Riser, SCR) 는 상부장력 라이저 (Top Tensioned Riser, TTR) 에 비하여 더욱 큰 선박의 움직임을 허용하며 , 플렉서블 라이저 (Flexible Riser) 에 비하여 열악한 환경에 더욱 잘 견딜 수 있다 . 따라서 카티너리 라이저는 심해 자원개발에 가장 넓게 적용되고 있다 . 카티너리 라이저는 수명기간 중 해류와 파랑 등의 외부 하중에 지속적으로 노출되며 , 구조적인 안정성을 확보하기 위하여 이와 같은 외부환경에 잘 견딜 수 있도록 설계되어야 한다 . 따라서 라이저의 피로수명을 예측하는 것이 설계의 핵심 중 하나이다.
라이저가 설치된 해역에 일정한 속도 이상의 해류가 흐르는 경우, 급격한 구배 변화로 인하여 라이저 뒷면에는 규칙적인 패턴의 와류 흘림(Vortex Shedding) 현상이 발생하게 된다. 와류 흘림은 라이저에 주기적으로 하중을 발생시키며, 라이저의 움직임과 상호작용에 의하여 와류유기 진동(Vortex-Induced Vibration, VIV)을 발생시킨다. 특히, 와류 흘림 주파수가 라이저의 고유진동수(Natural Frequency)와 가까워지면 라이저는 와류 흘림과 동조화되어 대변위 진동이 발생하게 된다. 이를 Lock-in 현상이라고 하며, 이 때 라이저는 큰 구조 응력에 의하여 피로손상이 발생한다(Park et al., 2004).
이와 같은 와류유기 진동에 의한 라이저의 피로수명을 예측하기 위하여 많은 연구가 진행되었다. Kim(2013)과 Youn(2016)은 파워입력범위와 분포방법에 따른 상부장력 라이저의 와류유기 진동 특성을 연구하였으며, Gao 등(Gao et al., 2011)은 카티너리 라이저의 와류유기 진동에 의한 피로 수명을 예측하였다. Vikestad 등(Vikestad et al., 2000)은 Venugopal(1996)이 제시한 유체 감쇠 모델을 Gopalkrishnan(1993)과 Vikestad(1998)의 실험과 비교하였다.
본 연구에서는 모드중첩법에 기반한 수치모델을 제시하여 카티너리 라이저의 와류유기 진동 수치해석기법을 정리한다. 카티너리 라이저는 양단이 단순지지된 유연한 케이블로 모델링되며, 입력과 출력 파워의 평형을 이용하여 진동 응답 및 피로수명을 계산한다.
2. 수치 이론
심해 라이저는 길이가 지름에 비하여 매우 크며(L/D>200), 이 경우 라이저는 유연한 케이블로 간주할 수 있다(DNV, 2006). 외력이 작용하는 케이블의 지배방정식은 다음과 같다 (Gao et al., 2011).

여기서, m(s)는 접수에 의한 부가질량을 포함한 단위 길이당 질량, R(s)는 단위 길이당 감쇠, T(s)는 유효장력, P(s,t)는 라이저에 작용하는 외력이며, s와 t는 각각 위치좌표와 시간을 나타낸다. 외력은 와류흘림에 의해 주기적으로 작용하므로 P(s,t)는 다음과 같이 나타낼 수 있다.

여기서, ρf는 유체 밀도, D는 라이저 지름, V(s)는 해류 속도, 은CL(s;ωr) r번째 고유모드에 대한 양력계수이다.
Yr(s)와 qr(s)를 각각 r번째 고유모드와 모드좌표계라고 정의하면, 라이저의 변위 응답을 다음과 같이 각 모달 변위의 중첩으로 나타낼 수 있다.

식 (3)을 식 (1)에 넣고 정리하면, 다음과 같은 모드좌표계에서의 운동방정식을 얻을 수 있다.

여기서, Mr, Rr, Kr, Pr(t)는 각각 r번째 모달 질량, 모달 감쇠, 모달 강성 및 모달 힘이며, 식 (5)에서 식 (8)과 같다.




여기서, double prime(′′)은 2계 미분을 나타낸다.
입력 파워는 외력과 속도의 곱으로 나타낼 수 있으며, r번째 모드의 입력 파워는 다음과 같다.

여기서, Ar은 r번째 모드변위의 진폭(Mode Displacement Amplitude)이며, Φ(s)는 외력의 가진 범위와 기여도를 나타내는 함수이다(Kim, 2013). 본 연구에서는 파워입력이 중복되는 경우, 중복되는 모드의 파워 크기에 비례하여 기여도를 결정하였다.
또한, 출력 파워는 감쇠력과 속도의 곱으로 나타낼 수 있으며, r번째 모드의 출력 파워는 다음과 같다.

r번째 모드의 한 주기 동안의 시간 평균 입력파워 및 출력파워는 각각 식 (11) 및 식 (12)와 같다.


각각의 모드에 대하여 입력 파워와 출력 파워는 평형을 이루므로, 다음을 얻을 수 있다.

Ar/D의 초기값을 가정하면 감쇠 R(s)와 양력 계수 CL(s;ωr)을 구할 수 있으며, 이를 이용하여 다시 Ar/D를 구할 수 있다. 이를 반복적으로 계산하여 연속적인 Ar/D의 값의 차이가 일정한 값 이하이면 수렴한 것으로 판단한다.
단위 길이당 감쇠 R(s)는 구조감쇠 Rs와 유체동역학적 감쇠 Rh(s)로 구성되며, 본 연구에서 구조감쇠는 0.003으로 가정한다. 그리고 유체동역학적 감쇠는 감소속도(Reduced Velocity)를 기준으로 두 개의 다른 모델로 나타난다(Vikestad et al., 2000). 저속 (Low Reduced Velocity) 범위인 파워 입력 구간에서 Rh(s)는 식 (14)와 같고, 고속(High Reduced Velocity) 범위인 파워 출력 구간에서 Rh(s)는 식 (15)와 같다.


여기서, Csw, Crl, Crh는 각각 정수 (Still Water), 저속 및 고속에서의 경험계수이며, 각각 0.20, 0.18, 0.20이 적용되었다. 또한, Re 는 레이놀즈 수(Reynolds Number)이며, 다음과 같이 나타낸다.

여기서, v는 유체점성(Fluid Viscosity)이다.
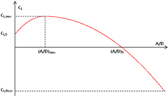
라이저의 양력 계수 CL은 무차원 응답 진폭 A/D의 함수로 표현할 수 있다(Vandiver and Li, 2005). CL은 Fig. 1과 같이 세 점을 연결하는 두 개의 포물선의 조합으로 구성되며, 양력계수의 최소값 CL,floor가 정의된다. 본 연구에서는 Table 1에 정리된 값을 이용하여 양력계수를 추정하였다.

단순지지(pinned-pineed) 조건에서 식 (4)를 이용하여 식 (17) 및 식 (18)과 같이 라이저의 고유진동수 ωr과 고유모드 Yr(s)를 구할 수 있다.


RMS 응력(Root Mean-Squared Stress)은 다음과 같다(Vandiver and Li, 2005).

여기서, n과 r은 고유모드이며, E는 탄성계수(Young’s Modulus), Ds는 강력 지름 (Strength Diameter)이다. 모달 힘 Pnr과 주파수 응답 함수 Hnr은 각각 식 (20) 및 식 (21)과 같다.


여기서, sgn[( )]는 다음과 같은 부호 함수이다.

또한, 감쇠비 ζn은 구조 감쇠비 ζn,s (=0.003)와 유체동역학적 감쇠비 ζn,h로 구성되며, 유체동역학적 감쇠비 ζn,h는 다음과 같다.

가진 주파수 ωr에 대한 와류유기 피로손상은 다음과 같이 나타낼 수 있다.

여기서, Γ( )는 식 (25)에 의해 정의되는 감마(Gamma)함수이다. 또한 b와 c는 식 (26)에 의해 정의되는 S-N(응력-반복횟수) 곡선의 계수이며, Sr,rms는 식 (27)과 같다.



여기서, S는 응력, N은 반복의 수이며, SCF는 Stress Concentration Factor로 1.2를 적용하였다(GAO et al., 2011).
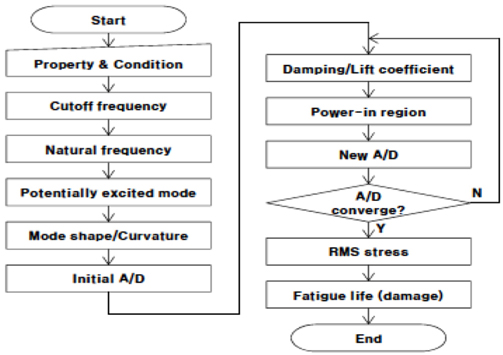
이를 정리하면, 라이저의 와류유기 진동해석 기법에 대한 흐름도는 Fig. 2와 같다.
3. 수치 해석
3.1 검증 모델
Fig. 3과 같은 카티너리 라이저의 플랫폼 수직 설치각도(Hang-Off Angle, HOA)가 θ인 라이저의 플랫폼 설치점과 해저면 사이의 거리를 H라고 가정하면, 카티너리 방정식에 의해 라이저의 전체 길이 L은 다음과 같다.
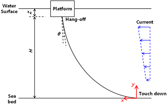

라이저와 해저면의 교점을 원점, 수면 방향을 y축, 흐름 방향을 x축으로 하는 좌표 평면을 가정하면, 카티너리 라이저는 다음의 식으로 나타낼 수 있다.

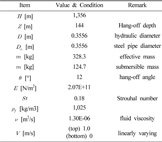
라이저의 플랫폼 수직 설치각도 θ가 매우 작다고 가정하면, 카티너리 라이저는 상부장력 라이저로 근사될 수 있다. 수치해석의 정확도를 검증하기 위하여 Table 2와 같은 검증 라이저 모델에 대하여 수치해석을 수행하고 상용프로그램인 SHEAR7과 비교하였다. 비교 해석을 위하여 검증 모델의 유효장력은 상부장력으로 가정하였다.

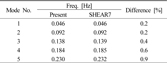
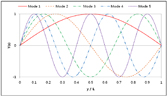
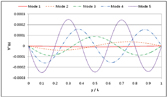
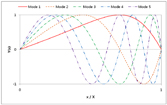
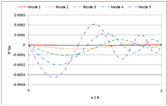
Table 2에서 제시한 검증 모델은 일정한 단면을 가지며, 양단은 단순지지 (Pinned-Pinned)되는 것으로 가정되었다. 또한, 라이저의 플랫폼 설치점은 해수면과 동일하다고 가정하였다. 라이저의 길이 L은 식 (28)에 의해 구할 수 있으며, 고유진동수와 고유모드는 식 (17)과 식 (18)에 의해 구할 수 있다. 라이저 모델의 고유진동수는 Table 3에 나타내었으며, 5차 까지의 고유모드 Y(s)와 고유모드의 2 계 미분인 곡률 Y′′(s)은 각각 Fig. 4 및 Fig. 5와 같다. 양단이 단순지지되는 조건에서 양단의 Y(s)와 Y′′(s)은 모두 0이며, 식 (19)에 따라서 와류유기 진동에 의한 응력은 양단에서 작용하지 않는다.
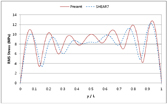
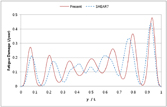
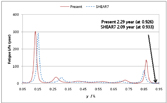
검증 모델의 와류유기 진동해석에는 모든 가진 모드를 고려하였으며, 해석 결과는 Fig. 6에 SHEAR7 결과와 함께 나타내었다. 검증 모델의 최대 응력은 12.1MPa이며, y/L=0.930에서 발생하였다. SHEAR7 결과에 따르면, 최대 응력은 y/L=0.925에서 12.3Mpa이다. 따라서 본 연구의 해석기법이 SHEAR7 결과와 상당히 부합됨을 확인할 수 있다. 그러나 SHEAR7결과와 일부 차이를 나타내고 있으며, 이는 모드중첩에 따른 외력의 가진범위와 기여도의 차이에서 기인하는 것으로 보인다. 피로손상을 계산하기 위하여 Table 4에 제시된 물성치를 적용하였다(Youn, 2016). 따라서, N = cS˗b로 정의되는 S−N 곡선에서 b는 3.7421이며, c는 7.0406e35로 산정된다. 검증 모델의 피로손상 및 피로수명 해석 결과는 각각 Fig. 7 및 Fig. 8과 같다. 최대 피로 손상은 라이저 상단에서 발생하였으며, 본 연구에서 피로수명은 2.09년을 나타내었으며 SHEAR7은 2.29년을 나타내었다.

3.2 수치 모델
라이저의 플랫폼 수직 설치각도 θ가 12°인 카티너리 라이저 모델에 대하여 수치해석을 수행하였다. Table 5에 제시한 수치 모델은 일정한 단면을 가지며, 양단은 검증 모델과 마찬가지로 단순지지(Pinned-Pinned)되는 것으로 가정하였다. 그러나 본 수치 모델의 유효장력은 카티너리 라이저의 자중과 수직 설치각도에 의하여 결정된다. 카티너리 라이저의 유효장력은 다음과 같이 나타낼 수 있다.

여기서, w는 라이저의 단위 길이당 수중 무게, s는 지반과 접촉점으로부터 라이저 길이, T0,x와 T0,y는 지반과 접촉점에서 유효 장력의 각각 수평 성분과 수직 성분이다.
라이저의 고유진동수는 Table 6에 나타내었으며, 흐름 방향 길이 X에 대하여 5차 까지의 고유모드와 곡률은 각각 Fig. 9 및 Fig. 10에 나타내었다. 라이저의 길이 s/L에 대하여 고유모드와 곡률을 그리면 각각 Fig. 4 및 Fig. 5와 비슷한 그래프를 얻을 수 있다. 양단이 단순지지되는 조건에서 양단의 Y(s)와 Y′′(s)은 모두 0이며, 식 (19)에 따라서 와류유기 진동에 의한 응력은 양단에서 작용하지 않는다.

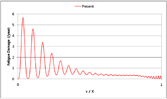
카티너리 라이저 모델의 와류유기 진동해석에는 모든 가진 모드를 고려하였으며, 와류유기 진동해석 결과는 Fig. 11에 나타내었다. 검증 모델의 최대 응력은 15.6MPa이며, x/X=0.035에서 발생하였다. 와류유기 진동에 의한 피로손상을 계산을 위하여 Table 4에 제시된 물성치를 적용하였다. 검증 모델의 피로손상 및 피로수명 해석 결과는 각각 Fig. 12 및 Fig. 13과 같다. 최대 피로 손상은 유효장력이 상대적으로 작은 라이저 하단에서 발생하였으며, 피로수명은 0.18년을 나타내었다.


라이저의 플랫폼 수직 설치각도 θ가 다른 5가지 카티너리 라이저 모델에 대하여 와류유기 진동 응답을 관찰하였다. 라이저의 기본 물성치는 Table 5의 카티너리 라이저와 동일하며, 수직 설치각도는 12°를 기준으로 증감된다. 해석 모델은 마찬가지로 일정한 단면을 가지며 양단은 단순지지(Pinned-Pinned)되는 것으로 가정하였다. 5가지 카티너리 라이저 모델의 고유진동수 및 라이저의 전체 길이는 Table 7에 나타내었다. 또한, 수직 설치각도에 따른 최대 RMS 응력은 Table 8에 나타내었으며, 흐름 방향 길이 X에 대하여 RMS 응력은 Fig. 14에 나타내었다.
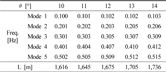

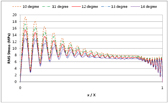
수직 설치각도 θ가 증가함에 따라서 라이저의 길이도 증가하였지만, 고유진동수는 거의 변화가 없었다. 이는 수직 설치각도 θ가 증가한 라이저의 유효장력이 증가하여 오히려 고유진동수를 증가시켰기 때문이다. 따라서 해당 범위 내에서는 수직 설치각도 θ가 증가함에 따라서 와류유기 진동에 의한 RMS 응력은 감소하는 것으로 나타났다.
4. 결 론
본 연구에서는 모드중첩법에 기반한 수치모델을 이용하여 카티너리 라이저의 와류유기 진동 수치해석기법을 정립하였다. 길이가 지름에 비하여 매우 큰 심해 라이저를 유연한 케이블로 근사하였으며, 와류흘림에 대한 라이저의 동적 응답을 관찰하였다. 카티너리 라이저에 대한 해석을 검증하기 위하여 라이저의 수직 설치각도를 0으로 가정하여 상부장력 라이저로 이상화하였으며, SHEAR7 결과와 비교하여 그 타당성을 검토하였다. SHEAR7과 일부 차이는 모드중첩에 따른 외력의 가진범위와 기여도의 차이에서 기인하는 것으로 보인다.
정립된 해석 기법을 이용하여 카티너리 라이저의 와류유기 피로손상과 피로수명을 계산하였으며, 수직 설치각도의 변화에 따른 사례 연구를 통하여 카티너리 라이저의 응답 특성을 관찰하였다. 수직 설치각도가 증가함에 따라서 라이저의 길이도 증가하였지만, 고유진동수는 거의 변화가 없었다. 이는 수직 설치각도가 증가한 라이저의 유효장력이 증가하여 오히려 고유진동수를 증가시켰기 때문이며, 일정한 수직 설치각도 범위에서는 각도가 증가함에 따라서 와류유기 진동에 의한 RMS 응력은 감소하는 것으로 나타났다.
라이저의 와류유기 진동에 대한 정도를 향상하기 위하여 다양한 해석 및 실험 결과와 비교 등을 통한 외력에 대한 추가적인 연구가 필요하다.




